 2014, Vol. 32
2014, Vol. 32 

2. 上海电力学院, 上海200090
2. Shanghai University of Electric Power, Shanghai 200090
随着电网控制技术的迅速发展,区域电网互联 将成为趋势。为了抑制区域扰动对电网频率的影 响,目前传统AGC(Automatic Generation Control,自 动发电控制)采用的是LFC(Load Frequency Control,负荷频率控制)方式。这种方式基于ACE(Ar- ea Control Error,地区控制偏差),利用常规比例积 分(PI)算法计算得到功率调节命令,因此调节品质 直接依赖于频率偏差系数K。因电网的负荷特性和 负荷大小均是随机的、时变的[1],实际区域电网的频 率偏差系数K存在难以通过测取而进行设定的问 题,导致传统电网的频率控制存在调节时间过长、 超调等问题而达不到最优控制;特别是当负荷扰动 过大导致地区调节容量不足时,会对地区电能质量 的迅速恢复及经济性能指标造成不利影响[2]。
为了改善传统AGC控制性能,各种先进控制策 略如滑膜控制[3]、神经网络控制[4]、模糊控制[5]等都被 用于LFC系统的控制器研究中,并取得了较好的控 制效果,而模型预测控制作为1种基于模型的优化 控制技术,因其具有易于建模、滚动优化等特点,也 被用于解决经典AGC的控制缺陷。文献[6, 7]分别 采用动态矩阵预测控制DMC算法[8]和模糊预测控制 对AGC控制器进行了设计,并通过仿真取得了一定 的成果。但这些预测控制理论研究中均未将区域 有功功率的限制纳入控制考虑范畴,且仍然依赖于 频率偏差系数K,在实际电网的应用中无法很好地 适应地区负荷变动和支援的功能。
本文提出的基于互联电网状态空间模型的多 变量预测控制器算法设计技术,基于状态空间模型 的非线性约束控制问题,利用QP(Quadratic Programming,二次规划)求解,解决了系统控制对频率 偏差系数K的依赖问题,同时保证了当发生互联电 网相互支援时的最优控制;并以2个区域电网为例, 仿真验证了所提出的多变量约束预测控制用于LFC 控制器的有效性。 1 互联电网LFC被控对象状态空间模型
以2个区域互联电网为例,由各环节传递函数 组成的互联电网LFC被控对象动态模型如图 1所 示。
 |
图 1 2个区域互联电网LFC被控对象的 传递函数动态模型 |
图 1中包括发电机组对象和电网对象2大部 分,其中Ga1 (S)、Ga2 (S)、Gb1 (S)和Gb2 (S)分别为区域1 和区域2发电机组对象;Ga3 (S)、Gb3 (S)分别为区域1 与区域2的电网对象;Δf1为频率的变化量;Pci为调 度指令(作为发电机控制量);ΔPti为各区域发电机 组输出功率增量;ΔPLi为各区域的用电负荷变化量; ΔP12为2个区域联络线交换功率的变化量;Tgi为调 速器时间常数;Tti为发电机时间常数;Ri为机组调差系数;Δxgi为调速器位置增量;KLi*为负荷的频率调节 效应系数;TPi为负荷的频率调节惯性时间常数;T12 为区域1和区域2之间联络线功率同步系数。 被控对象的离散状态空间模型如公式(1):


LFC预测控制器设计结构如图 2所示。
由于电网负荷未知扰动的存在,使得动态系统
更为复杂,可采用观测器来估计这些状态 (k),控
制器的设计方程如公式(2):
(k),控
制器的设计方程如公式(2):

 |
图 2 LFC预测控制器结构 |
本文所设计的状态观测器模型与互联电网被 控对象模型相同,并将实际电网输出与状态观测器 输出的偏差,通过1个观测器增益矩阵L后作用于 观测器状态估计,对L的配置原则是确保A-LC的 特征值以一定速度收敛到0 [8]。
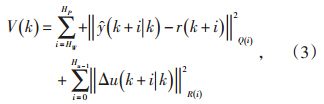
根据预测控制有限时域滚动优化原则,目标函 数V(k)为:
且令

则目标函数可写为:

其中Q,R为加权矩阵,因
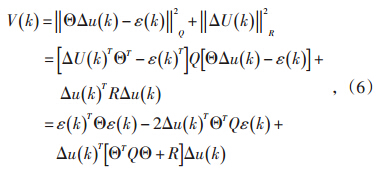
则

其中, 。
。
优化控制器输出Δu(k)求解等价为:

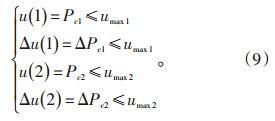
其中,umax1、Δumax1及umax2、Δumax2分别为区域1和 区域2的调节最大容量值与调节容量变化率限值。 3 仿真实例
在Matlab/simulink环境下,分别采用simulink和 MPC函数工具箱构建以联络线功率频率偏差控制 为控制目标的2个区域互联电网AGC系统仿真模 型,按照本文算法设计MPC控制器。MPC仿真研究 中选取采样周期Ts=0.1s、预测步长P=15、控制时域 M=10、误差权矩阵Q=10I、控制权矩阵R=0.01I,分 别进行系统动态响应性能对比、抗随机干扰性能对 比与鲁棒性对比仿真分析。 3.1 2个区域容量均足够时区域负荷扰动的仿真研 究
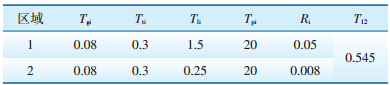
2个区域容量均足够,即不加容量限值时,2个 区域互联电力系统AGC仿真模型参数如表 1所示 (按照2个区域负荷比为1∶6的关系配置参数)。在 t=1s时给区域1和区域2中添加负荷的阶跃扰动, 分 别 设 置Δul1=0.01p.u.,Δul2=0.03p.u.。分别采用 MPC与PI控制时系统的响应曲线及AGC各区域的 输出响应如图 3、图 4所示。
| 表 1 区域被控对象特性参数(模型1) |
 |
图 3 不同控制器作用下频率偏差响应曲线 |
 |
图 4 不同控制器作用下联络线交换功率响应曲线 |
通过对比仿真输出曲线,可看出MPC控制器作 用下联络线交换功率响应波动幅度远小于PI控制器作用时的波动幅度,且调节时间显著减小。在 MPC控制器作用下,两个区域的频率偏差响应波动幅度略小于PI控制器作用时的波动幅度,但调节时 间也显著减小。 3.2 2个区域容量不足时单区域负荷扰动的仿真研 究
2个区域容量不足的研究方法为:给仿真模型 增加容量限值,2个区域互联电力系统AGC仿真模 型参数仍取表 1中参数,给2个区域机组出力增加 限值0.008p.u.,即令:Pti≤0.008p.u.。在t=1s时给区 域1中添加负荷阶跃扰动ΔPl1=0.01p.u.,分别采用 MPC与PI控制时系统的响应曲线及AGC各区域的 输出响应如图 5、图 6所示。
 |
图 5 加限值时不同控制器作用下频率偏差响应曲线 |
 |
图 6 加限值时联络线交换功率响应曲线对比 |
通过仿真输出曲线可看出,对于联络线交换功 率、区域1与区域2的频率控制效果来说,MPC控制 器的控制效果要优于PI控制器的控制效果,MPC控 制依然具有较为明显的时间调节优势及较小的超 调量。 3.3 抗随机干扰性能的仿真研究
2个区域互联电力系统AGC仿真模型参数仍取 表 1所示数值,在t=1s时给区域1和区域2中添加负荷 的 白 噪 声 扰 动,分 别 设 置ΔPl1=0.01p.u.、ΔPl2= 0.03p.u.的白噪声干扰信号。分别采用MPC与PI控 制时系统的响应曲线及AGC各区域的输出响应如 图 7、图 8所示。
 |
图 7 负荷为白噪声干扰信号时频率偏差响应曲线 |
 |
图 8 负荷为白噪声干扰信号时联络线交换功率响应曲线 |
可以看出,MPC控制器对电网负荷随机干扰的 抑制能力要明显优于PI控制器。 4 结语
本文提出的互联电网负荷频率的多变量约束 预测控制技术,克服了目前频率控制算法普遍依赖 于频率偏差系数的缺陷,将地区调节容量限制作为 约束条件,使得算法具有实际的工程应用价值。通 过负荷扰动及随机白噪声扰动的仿真表明,该预测 控制算法对互联电网的频率控制效果较常规方法 具有明显优势。
| [1] | 高翔,等.现代电网频率控制应用技术[M].北京:中国电力 出版社,2009:142-151. |
| [2] | 刘乐.自动发电控制中频率偏差系数研究[D].大连:大连 理工大学,2008:44-50. |
| [3] | 孟祥萍,薛昌飞,张化光.多区域互联电力系统的PI滑模 负荷频率控制[J].中国电机工程学报,2001,21(3):6-11. |
| [4] | Sabahi, Nekoui MA. Load Frequency control in interconnected power system using modified dynamic neural networks[R]. Athens: Proceedings of Mediterranean Conference on Control and Automation,2007:1-5. |
| [5] | 吴捷,柳明.非线性控制在电力系统中的应用[J].控制理论 与应用,2002,23(1):5-8. |
| [6] | 杨罡,刘明光,屈志坚.基于MPC算法的电力系统负荷频 率控制[J].北京交通大学学报,2012,36(2):105-110. |
| [7] | 周念成,付鹏武,王强钢,等.基于模型预测控制的两个区 域互联电网AGC 系统研究[J].电力系统保护与控制, 2012,22(40):46-51. |
| [8] | 刘乐,刘娆,李卫东,等.目标可控的超前频率偏差系数确 定方法设计[J].电力系统自动化,2007,5(31):40-45. |