 2005, Vol. 41
2005, Vol. 41文章信息
- 庞勇, 李增元, 陈尔学, 孙国清.
- Pang Yong, Li Zengyuan, Chen Erxue, Sun Guoqing.
- 激光雷达技术及其在林业上的应用
- Lidar Remote Sensing Technology and Its Application in Forestry
- 林业科学, 2005, 41(3): 129-136.
- Scientia Silvae Sinicae, 2005, 41(3): 129-136.
-
文章历史
- 收稿日期:2004-10-29
-
作者相关文章


2. 中国科学院遥感应用研究所遥感信息科学开放研究实验室 北京 100101;
3. Department of Geography, University of Maryland, College Park, MD 20742 USA
2. Institute of Remote Sensing Applications, Chinese Academy of Sciences Beijing 100101;
3. Department of Geography, University of Maryland, College Park, MD 20742 USA
森林是陆地上面积最大、分布最广、组成结构最复杂、物质资源最丰富的生态系统,也是自然界功能最完善的资源库,生物基因库,水、碳、养分及能源储存调节库,对改善生态环境,维护生态平衡具有不可替代的作用。传统的森林参数测定需要外业实地测量,仅能获得一些点上的数据,不利于研究区域尺度或大范围的森林参数。随着遥感技术应用日益深入和成熟,遥感技术已经成功用于大区域森林制图、灾害监测等方面,但定量获取森林高度、生物量等参数的工作直到合成孔径雷达和激光雷达技术的成熟才取得了突破性进展。
成像光谱仪、微波雷达、高分辨率分光计和主动激光雷达是世界各国当前和今后发展的对地观测主要的4种手段(郭华东,2001)。激光是20世纪60年代发展起来的一门新学科,在第1台激光器出现不久,以测距为主要功能的激光雷达便诞生了(戴永江,2002)。由于激光雷达极高的角分辨能力、距离分辨能力、抗干扰能力等独特的优点,使得激光雷达可以高精度地获取地表物体的高度信息。因此,在民用和军事上都已取得了广泛的的应用。国外已经就激光雷达在林业上的应用进行了大量成功的尝试,尤其是在林木高度测量与林分垂直结构信息获取方面具有其他遥感技术无可比拟的优势。普通的光学传感器只能用于提供森林水平分布的详细信息而很难提供垂直分布的信息;而激光雷达遥感根据采样方式和配置不同(离散回波还是波形激光雷达)可以高精度地提供森林水平和垂直的信息。
本文首先介绍了激光雷达遥感的的工作原理、用于林业遥感的一些主要的激光雷达系统及参数设置,然后对这一技术在林业上的应用现状进行了详细评述,重点对树高反演和生物量/蓄积量估计算法进行了分析,最后对激光雷达用于森林监测的潜力和局限型进行了分析。
1 林业用激光雷达工作原理及主要系统 1.1 林业用激光雷达工作原理激光雷达测高基本原理与雷达高度计相同,只是它用的是激光,工作频段是可见光和近红外光,比微波雷达要高得多(10 000~100 000倍)。激光雷达以脉冲激光作为技术手段,以激光束扫描的工作方式测量从传感器到地面上激光照射点的距离,即通过测量地面采样点激光回波脉冲相对于发射激光主波之间的时间延迟得到传感器到地面采样点之间的距离(Bachman,1979)。其测距基本原理可表示为(Baltsavias, 1999a):
|
(1) |
其中R是传感器到目标物体的距离,c是光速,t是激光脉冲从激光器到被测目标的往返传输时间。
激光雷达从目标物体的回波强度可由激光雷达方程来表示(戴永江,2002):

|
(2) |
其中PR是接收的激光功率;PT是发射的激光功率;GT是发射天线增益;σ是目标散射截面;D是接收孔径;ηAtm是单程大气传输系数;ηSys是激光雷达光学系统的传输系数。
用于林业的激光雷达主要有2类:记录完整波形数据的大光斑激光雷达与仅记录少量回波的小光斑激光雷达。前者主要通过回波波形用于反演大范围森林的垂直结构与生物量等参数,后者则利用高密度的激光点云进行精确的单木水平上的高度估测等工作。
1.2 大光斑系统的特点大光斑激光雷达系统一般指光斑直径在8~70 m、连续记录激光回波波形的激光雷达系统。回波记录的时间间隔决定了激光点内物质被感知的详细程度,每一时刻的回波都对应着一个强度-时间波形并且代表着该激光点范围内的一个截面面积。如图 1所示,森林的激光回波波形指示着从树顶开始,通过树冠、林下植被,最后是地面回波的森林垂直结构。由于大光斑连续回波的激光雷达的光斑通常都大于林木冠幅,波形中往往包含了森林冠层和许多森林元素的信息而不仅仅是单株树的信息。

|
图 1 大光斑激光雷达森林回波波形示意图 Fig. 1 Sketch map of large footprint lidar waveform from forest |
对连续回波的激光雷达能量超过某一给定噪声阈值(背景噪声)即开始以一定的时间间隔进行记录。激光雷达记录装置对少量的光子变化有着良好的敏感性,使得很少的植被所引起的波形形状的改变都能得到反映。波形的采样间隔ΔR (即距离分辨率)取决于回波记录的时间间隔Δt(即时间分辨率),即:

|
(3) |
目前的大光斑激光雷达系统是以美国为首进行发展,主要有NASA机载的LVIS系统、S LICER系统和星载的GLAS系统。其中LVIS系统和SLICER系统的光斑大小在8~25 m,在美国、加拿大、巴西的典型林区进行了多次飞行试验;星载GLAS系统的光斑直径为70 m,目前已经在全球获取了很多数据。另外,美国正在计划发射植被冠层激光雷达系统(VCL)(Dubayah et al.,1997),LVIS系统是其机载实验系统(Blair et al., 1999)。奥地利的Riegl公司在2004年底推出了小光斑的记录连续波形的机载lidar系统,并进行了试验飞行(Wagner et al., 2004)。
1.3 小光斑系统的特点小光斑激光雷达系统一般指光斑直径小于1 m、离散记录少量激光回波数据的激光雷达系统。激光点的大小随着飞行高度的改变而改变,一般为0.2~0.9 m。小光斑的l idar系统首先被用于地形测绘,近年来才被用于林业。
由于小光斑激光雷达的光斑尺寸小于林木冠幅,此类型的激光雷达仅能对树冠的一部分进行感应。因此,小光斑激光雷达系统需要在水平方向上增加采样频率以弥补其在垂直方向上采样的不足。激光点的间距随着飞行速度的改变而改变,目前的小光斑激光雷达系统激光点的采样间隔大多小于1 m,在实际数据获取时得到的是被测物体的激光“点云” (如图 2所示)。往往每株树有几十个到几百个激光回波点,从这些点云中可以估算每株树的参数。

|
图 2 小光斑激光雷达森林回波点云示意图(Nilsson et al., 2003) Fig. 2 Small footprint lidar point cloud of pine (Nilsson et al., 2003) |
目前的小光斑激光雷达系统已经在国外取得了广泛的应用,国外一些商业公司已推出了林业用小光斑激光雷达系统(Baltsavias, 1999b),比较成熟的有瑞典的TopEye机载系统、德国的TopoScan系统和TopSys系统、奥地利的Riegle系统、加拿大Optech公司的ALTM系统、美国的PALS系统等。
2 激光雷达在林业上的应用 2.1 国外研究现状MacLean与Krabill(1984)使用摄影测量和光密度测量的方法发现树冠垂直剖面与森林蓄积量的对数成线性关系,从而设想如果激光雷达可以精确重建树冠剖面,那么森林蓄积量即可被估测出来。最早公开发表应用激光雷达进行森林参数测量的是前苏联(Solodukhin et al., 1977),结果表明激光雷达估测的树高与摄影测量估测结果的均方根误差为14 cm。随后美国和加拿大的Arp等(1982)、Nelson等(1984)、Aldred等(1985)和MacLean等(1986)开展了一些试验研究。加拿大林业研究所展示了激光雷达剖面数据进行林分高度、郁闭度和林下地形估测的能力(Aldred et al., 1985)。在同一时期,激光雷达在中美洲被用于热带林制图(Arp et al., 1982)。Maclean等(1986)也注意到从森林返回的激光波形与从海洋探测中返回的激光波形很相近,从而发现了利用激光雷达估计森林属性和地形测量的可能性。
进入20世纪90年代以来,随着DGPS和IMU技术的发展并成功用于机载遥感平台的定位和姿态控制,激光雷达技术发展十分迅速。近十年来,研究者发展提出了许多用激光雷达数据反演林木参数的算法(Nilson et al., 1996;1997;Lefsky et al., 2002;Means et al., 1999),极大推进了激光雷达在林业上的应用。小光斑的激光雷达系统已经成功地用于大范围的森林资源清查中(Næsset,2004),星载大光斑激光雷达已经在轨运行并成功地进行了全球的数据获取(Zwally et al., 2002)。
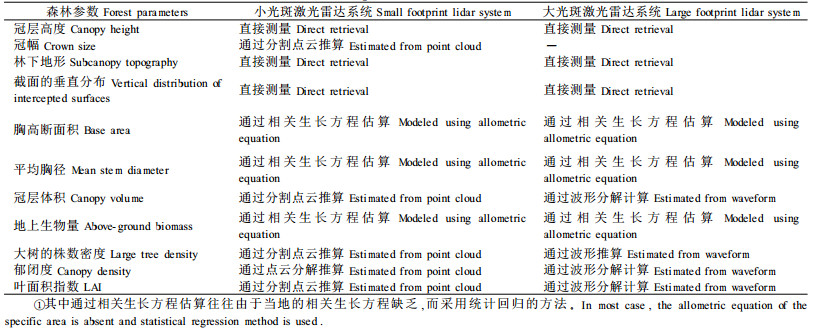
激光雷达遥感已经展现出直接测量和间接估计主要森林参数(表 1)的能力。
|
|
加拿大女王大学地理系的St-Onge等(2001)用激光雷达技术进行森林林冠高度和树高的测定,获得了高精度的测量结果。Nilson等通过计算冠顶和地面回波之间的距离计算了树高,精度达90%以上。并通过计算回波波形的面积与树冠体积、地上生物量、林分断面积、郁闭度建立相关模型,相关性很高(Nilson et al., 1996; Means et al., 1999)。NASA-GSFC的Harding等使用机载激光雷达SLICER数据重建出了阔叶林的冠层垂直分布,与地面实测结果十分接近(Nilsson et al., 1996;Harding et al., 2001)。马里兰大学地理系Dub ayah等人与NASA-GSFC合作提出了星载植被激光雷达系统(VCL)计划,该计划利用机载实验系统(LVIS)在美国、加拿大、澳大利亚等多个国家进行了成功的实验,在世界上许多有影响的杂志上发表了很多文章(Dubayah,1997;Drake et al., 2002; Hutt et al., 2004)。目前该计划正在进行系统的可靠性校验、审核,拟于2006年发射。
Lefsky等人对多种先进的遥感数据进行了比较研究,包括多时相的Landsat TM数据、高空间分辨率的机载ADAR数据、机载高光谱AVIRIS数据和机载激光雷达SLICER数据,结果表明激光雷达数据反演出的树木结构参数最好。并指出,尽管目前激光雷达只有采样数据,但与其他影像数据结合使用将大大提高林业遥感的精度,将来随着星载激光雷达系统的实施,必能取得更广泛的应用(Lefsky et al., 2001)。
芬兰、挪威、瑞典等一些北欧国家利用激光雷达数据与高空间分辨率的星载光学图像相结合,成功地提取了树木高度、林分郁闭度以及冠形参数(Hyyppa et al., 2003;Næsset,2003;Nilsson et al., 2003)。加拿大林业研究中心Wulder等(2000)也利用德国TOPsys公司的机载系统数据进行了林木高度和树木位置的研究。美国华盛顿大学精准林业研究中心利用机载激光雷达数据进行了精准林业测量方面的研究,证明了将激光雷达与高精度的光学影像相结合可以进行林业精准测量(Andersen et al., 2002)。
在精确反演森林参数的基础上,Solberg等(2004)将lidar用于树叶数量的估计,并提出了一种与高光谱遥感数据相结合进行森林健康监测的思路。Yu等(2004)利用两个时期的lidar数据进行了数据获取间隔期内的林木生长和采伐的自动探测。
澳大利亚国家工科学工业技术研究组织(CSIRO)的地球观测中心(EOC)开发出了地基激光雷达林分/植被结构参数遥感观测原型系统(ECHIDANTM)。该系统集成了鱼眼相机与激光测距仪,可以对整个半球内的树冠结构进行扫描,数据经过处理后可以得到该点的树冠结构统计特性,输出参数和树干、树叶的密度等相关,可以用于生态评价,林分生长模型和蓄积量的估测(Lovell et al., 2003)。
Sun等(2000)将森林生长模型与激光雷达波形模拟模型相结合模拟了多种情况下森林的激光雷达回波,并利用实际森林的机载激光雷达数据对模型进行了验证。模型表明激光雷达的波形数据很好地反映了森林的垂直结构和水平结构,并且利用模型可以分析冠形对参数反演的影响。Ni等(2001)将不连续冠层的几何光学模型和辐射传输模型引入到激光雷达信号的模拟模型,模拟了不连续冠层中枝叶集群分布和林隙对激光雷达波形的影响。Kotchenova等(2003)将时变随机辐射传输理论用于森林的激光雷达波形模拟,通过将多次散射机制引入模型,很好地解释了林下植被的存在对激光雷达波形的影响,并根据模型分析给出了利用激光雷达波形数据进行森林生物量反演的算法。
激光雷达传感器曾由美国航天飞机运载在1995年(SLA01计划)和1997年(SLA02计划)试飞,证实所得数据对地形和树木的测高很有用处。美国已于2003年1月成功发射了I CEsat(冰, 云和陆地高程卫星),是NASA从1999年开始的地球科学计划的一部分,目的是观测10至15年的一段时期内的大气、海洋、陆地、冰和生物圈,从而监测与气候、环境变化密切相关的地球—大气系统的变化。该卫星搭载有激光雷达传感器GLAS,GLAS是第一个能连续获取大气、地面回波数据的星载激光雷达,为观察大气中的云、气溶胶和地面植被垂直结构提供了全新的视角。其所提供的云的高度和厚度信息将大大提高短期天气预报的精度;提供的植被垂直结构信息将能更好地评价全球的植被分布和生物量。其激光光斑直径为70 m,采样间隔为170 m(Zwally et al., 2002)。目前,该卫星已经在轨测试完毕,开始正常的数据获取,数据分发工作已经从2004年开始1)。
1) http://www.nsidc.colorado.edu/data/icesat
2.2 国内研究现状我国“七五”期间曾立项研制激光遥感系统,因经费与技术上的原因,最终未能完成。目前我国激光雷达研制取得了很大进展,但限于硬件水平,主要是一些机载激光测距系统和用于测污的激光雷达系统,用于数字城市、建筑物高度测量(李树楷等,2000)、空气污染状况测量(阎吉祥等,2001)等方面。刘经南等(2003)综述了机载激光扫描测高技术。国内的已有激光雷达系统和适用于植被结构参数探测的激光雷达是不同的。国内尚没有类似功能的Lidar出现,更未见以该数据应用的相关研究报道。可喜的是,目前我国十分重视激光雷达系统的研制,科技部、电子工业部、中国科学院等单位已经开始研制机载/星载测距激光雷达系统;中国测绘科学院、武汉大学等单位正在计划引进国外机载小光斑激光雷达系统;北京星天地信息科技有限公司1)和山西亚太数字遥感新技术有限公司已经分别引进了高性能的机载小光斑激光雷达系统2)。
1) http://www.zhinc.com.cn/news/list.asp?id=191
国内在激光雷达林业应用领域的研究刚刚起步,中国林业科学研究院开展了针对星载记录完整波形数据的大光斑激光雷达系统的理论模拟(Pang et al., 2003; 2004)和林业应用研究(Sun et al., 2005),表明星载大光斑激光雷达可以用于林分水平的森林高度估计,并将ICEsat GLAS数据与MISR数据相结合进行了lidar反演树高在区域上的推广。用小光斑激光雷达数据进行林业应用研究在国内尚未见报道。
3 激光雷达反演森林参数的主要算法 3.1 森林高度大光斑lidar的波形是从能量超过某一给定噪声阈值即开始以一定的时间间隔进行记录的。因此,信号的前沿是从冠层顶部到传感器的距离,最后一个回波的峰值点表示着从地面到传感器的距离。则森林冠层高度通过激光雷达第一回波信号的前沿与最后回波峰值的差即可得到(图 3)。有时考虑到地面对波形展宽的影响,再减去地面波形的展宽。

|
图 3 大光斑激光雷达计算森林高度示意图 Fig. 3 Sketch map of forest height calculation from waveform |
大光斑激光雷达系统将从冠层到地面间的激光回波信号全部进行了数字化纪录,因此所记录的波形与树冠的垂直结构密切相关。尤其是大光斑激光雷达系统的波形记录了来自星下点冠层组分(包括叶、干、大枝和小枝)表面垂直投影的反射(图 1)。这些中间的回波波形与冠层的垂直分布密切相关很好地反映了冠层组分的表面积(包括树叶、树枝、树干),根据这些“中间截面”的回波可以部分重建林分冠层的垂直结构。Lefsky等(1999b)利用SLICER波形数据很好地描述了树冠体积的垂直分布,Parker等(2001)模拟了光在树冠中的透射情况。像树冠高度一样,树冠组分横截面的垂直分布为植被研究提供了一个新的手段,并且为树冠其他重要参数(如地上生物量)的估计提供了基础, 也可以作为评价森林连续分布的一个指标(Dubayah et al., 1997;Drake et al., 2002)。
随着林分年龄的增大和林分的生长,树冠组分的垂直分布相对于幼林时的状态也发生变化(Dubayah et al., 1997, Lefsky et al., 1999a)。成过熟天然林的特点是林隙多、林龄结构和高度变化大,相对同龄林而言在垂直结构上表现得更均一,而同龄林树顶附近的冠层物质占了绝大部分。激光雷达的波形对这些森林连续性垂直结构的变化很敏感(Lefsky et al., 1999a)。
3.3 郁闭度对郁闭度的反演小光斑系统可通过来自植被的回波数量和来自地面的回波数量之比,大光斑系统可通过波形中来自植被的回波面积和来自地面的回波面积之比进行计算。但二者都需要植被的反射率和地面的反射率作为输入,因此需要与其他数据相结合,依靠其他的光学遥感数据提供激光所用波段的植被反射率和地面反射率,否则很难进行大范围应用。
3.4 胸高断面积和蓄积量(生物量)MacLean与Krabill(1984)使用摄影测量和光密度测量的方法发现了树冠剖面与森林蓄积量的对数成线性关系,从而假定如果激光雷达可以精确重建树冠剖面,那么森林蓄积量即可被估测出来。此外,根据树木生长的相关生长规律,在一定区域内,树木的高度和胸径、蓄积量等存在着很好的相关关系,随着高度的增加其直径也随之增加,从而提高木材蓄积量和生物量。这种生物约束机制为利用激光雷达反演的高度信息进行森林生物量建模提供了理论基础。但由于树木的相关生长方程与树种、地域密切相关,往往由于当地的相关生长方程缺乏,而采用统计回归的方法。
波形植被部分的面积(AWAV)准确地反映了森林冠层的体积信息(见图 4),因此通过计算出的AWAV即可以建立森林蓄积量的反演模型。由于AWAV与回波强度紧密相关,因此在计算AWAV之前需要进行回波强度标定。

|
图 4 波形面积计算示意图 Fig. 4 Sketch map of waveform area calculation |
波形半能量高度(HOME)是回波中植被部分能量一半的高度(见图 5),是一个综合了森林冠层体积信息和森林高度信息的量,与森林生物量、蓄积量等参数密切相关,通过计算HOME也可以与森林蓄积量建立反演模型。

|
图 5 HOME计算示意图 Fig. 5 Sketch map of HOME calculation |
机载小光斑lidar系统被成功用于单木参数的估计,包括树高、树冠尺寸、树木位置、树种等。首先将小光斑lidar获得的激光“点云”数据进行滤波、分类和分割处理,区分出来自植被的反射和来自地面的反射,通过最大值滤波寻找出树木的顶点;然后分割出每株树的激光“点云”,根据每株树的激光“点云”采用类似于大光斑激光雷达数据处理方法即可得到树高和树冠尺寸,同时通过树木的顶点可以绘制树木位置图;然后即可构建单株树的矢量模型,根据构建的矢量模型进行树种识别(Pyysalo et al., 2002;Pfeifer et al., 2004)。
4 激光雷达林业应用的潜力与局限性分析 4.1 激光雷达林业应用的潜力激光雷达的优势是能够直接测量森林高度和垂直结构信息,弥补其他遥感手段的不足。但激光雷达很难提供大范围全覆盖的数据,尤其是对星载系统而言,与其他遥感技术手段相结合可以提供更准确、更全面的森林参数估计(Hese et al., 2005)。研究综合应用其他遥感数据和激光雷达数据的森林参数定量反演技术,将有利于发展完全基于遥感手段的定量遥感技术,在遥感技术更广泛深入地用于森林资源调查上有所突破。同时,利用高精度的激光雷达反演的森林参数还可以用作其他遥感手段的训练数据和验证数据。
对大范围森林高度、林下地形和截面的垂直分布的直接测量为森林调查和经营管理管理提供了丰富的数据。这些参数与其他生物物理参数(如地上生物量)具有很好的关系,为森林生态系统的功能和生产力的建模提供了参数。树冠垂直结构的信息和树叶的垂直剖面可以为森林生理生态研究提供大量的数据源。
最近几年发展的地基激光雷达系统在树木近景测量、木材质量评价等方面展现出很好的应用前景。
4.2 激光雷达林业应用的局限性分析尽管lidar在很多森林参数反演上都取得了很大的成功,但目前这一技术的应用仍很局限。主要表现为理论体系尚有待进一步完善、数据有限、数据分析处理软件缺乏,费用相对其它遥感手段较高。但随着技术的发展和应用的推广,费用将会大大降低。
小光斑系统由于是离散采样,往往会错失树顶的采样而低估树高;为了弥补这一点,需要增大采样密度,降低飞行高度,导致大范围应用所需费用很高。大光斑系统有效地避免了树顶的错失,幅宽也可以更大,但太大的光斑会受到林下地形和树木空间结构的影响。
目前可用的激光雷达数据很有限。由于高脉冲重复频率的激光器仅有少数国家能够生产,价格昂贵且进口受限制,目前仅有少数发达国家有业务化的运行系统。由于所测数据精度很高,对平台的姿态控制系统和姿态记录装置的要求很高,目前进口仍很困难。另外,商业的机载小光斑激光雷达系统现在的花费仍然较高。不过,我国目前在这方面取得了一些进展,可望在近几年内取得突破。
激光雷达遥感技术的林业应用是一门新的交叉学科,涵盖着遥感、测量、信号处理和林学中的多个分支学科(如森林经理、森林生态等),如何充分发挥这一高新技术的优势和作用,取决于相关学科的发展和协作。
戴永江. 2002. 激光雷达原理. 北京: 国防工业出版社.
|
郭华东. 2001. 对地观测技术与可持续发展. 北京: 科学出版社.
|
李树楷, 薛永祺. 2000. 高效三维遥感集成技术系统. 北京: 科学出版社.
|
刘经南, 张小红. 2003.武汉大学学报: 信息科学版, 28(2): 132-137 http://www.cnki.com.cn/Article/CJFDTotal-WHCH200302001.htm
|
阎吉祥, 龚顺生, 刘智深. 2001. 环境监测激光雷达. 北京: 科学出版社.
|
Aldred A, Bonner M. 1985. Application of airborne lasers to forest surveys. Canadian Forestry Service, Petawawa National Forestry Centre, Information Report PI-X-51
|
Andersen H, Stephen E Reutebuch, Gerard F Schreuder. 2002. Bayesian Object Recognition for the Analysis of Complex Forest Scenes in Airborne Laser Scanner Data. In ISPRS Commission Ⅲ, Symposium
|
Arp H, Griesbach J, Burns J. 1982. Mapping in tropical forests: a new approach using the laser APR. Photogrammetric Engineering and Remote Sensing, 48: 91-100. |
Bachman C G. 1979. Laser radar systems and techniques. MA: Artech House.
|
Baltsavias E P. 1999a. Airborne laser scanning: basic relations and formulas. ISPRS Journal of Photogrammetry and Remote Sensing, 54: 199-214. DOI:10.1016/S0924-2716(99)00015-5 |
Baltsavias E P. 1999b. Airborne laser scanner : existing systems and firms and other resources. ISPRS Journal of Photogrammetry & Remote Sensing, 54(2-3): 164-198. |
Blair J B, Hofton M A. 1999. Modeling laser altimeter return waveforms over complex vegetation using high-resolution elevation data. Geophysical Research Letters, 26(16): 2509-2512. DOI:10.1029/1999GL010484 |
Blair J B, Rabine D L, Hofton M A. 1999. The laser vegetation imaging sensor (LVIS): a medium-altitude, digitations-only, airborne laser altimeter for mapping vegetation and topography. ISPRS Journal of Photogrammetry and Remote Sensing, 54: 115-122. DOI:10.1016/S0924-2716(99)00002-7 |
Drake J B, Dubayah R O, Clark D B, et al. 2002. Estimation of tropical forest structural characteristics using large-footprint lidar. Remote Sensing of Environment, 79: 305-319. DOI:10.1016/S0034-4257(01)00281-4 |
Dubayah R, Blair J B, Bufton J L, et al. 1997. The vegetation canopy lidar mission, Land satellite information in the next decade Ⅱ: Sources and Applications. ASPRS Proceedings: 100-112. |
Hese S, Lucht W, Schmullius C, et al. 2005. Global biomass mapping for an improved understanding of the CO2 balance—the Earth observation mission Carbon-3D. Remote Sensing of Environment, 94: 94-104. DOI:10.1016/j.rse.2004.09.006 |
Hurtt George C, Ralph Dubayah, Jason Drake, et al. 2004. Beyond potential vegetation: combining lidar data and a height-structured model for carbon studies. Ecological Applications, 14(3): 873-883. DOI:10.1890/02-5317 |
Hyyppa J, Hyyppa H, Maltamo M, et al. 2003. Laser Scanning of forest resources- some of the Finnish experience. Proceedings of Scandlaser Scientific Workshop on Airborne Laser Scanning of Forests: 52-58. |
Kotchenova S, Nikolay V Shabanov, Knyazikhin Y, et al. 2003. Modeling lidar waveforms with time-dependent stochastic radiative transfer theory for remote estimations of forest biomass. Journal of Geophysical Research, 108(D15): 4484. DOI:10.1029/2002JD003288 |
Lefsky M A, Cohen W B, Acker S A, et al. 1999a. Lidar remote sensing of the canopy structure and biophysical properties of Douglas-fir western hemlock forests. Remote Sensing of Environment, 70: 339-361. DOI:10.1016/S0034-4257(99)00052-8 |
Lefsky M A, Harding D, Cohen W B, et al. 1999b. Surface lidar remote sensing of basal area and biomass in deciduous forests of Eastern Maryland, USA. Remote Sensing of Environment, 67: 83-98. DOI:10.1016/S0034-4257(98)00071-6 |
Lefsky M A, Cohen W B, Spies T A. 2001. An evaluation of alternate remote sensing products for forest inventory, monitoring, and mapping of Douglas-fir forests in western Oregon. Canadian Journal of Forest Research, 31(1): 78-87. DOI:10.1139/x00-142 |
Lefsky M A, Warren B Cohen, Geoffrey G Parker, et al. 2002. Lidar Remote Sensing for Ecosystem Studies. BioScience, 52(1): 19-30. DOI:10.1641/0006-3568(2002)052[0019:LRSFES]2.0.CO;2 |
Lim K, Paul Treitz, Ian Morrison, et al. 2002. Estimating aboveground biomass using lidar remote sensing. Remote Sensing for Agriculture, Ecosystems, and Hydrology IV Conference
|
Lovell J L, Jupp D L B, Culvenor D S, et al. 2003. Using airborne and ground-based ranging lidar to measure canopystructure in Australian forests. Canadian Journal of Remote Sensing, 29(5): 607-622. DOI:10.5589/m03-026 |
MacLean G A, Krabill W B. 1986. Grossmerchantable timber volume estimation using an airborne LiDAR system. Canadian Journal of Remote Sensing, 12: 7-18. DOI:10.1080/07038992.1986.10855092 |
Means J E, Acker S A, Harding D J, et al. 1999. Use of large-footprint scanning airborne lidar to estimate forest stand characteristics in the Western Cascades of Oregon. Remote Sensing of Environment, 67: 298-308. DOI:10.1016/S0034-4257(98)00091-1 |
Means J E, Acker S A, Fitt B J, et al. 2000. Predicting forest stand characteristics with airborne scanning lidar. Photogrammetric Engineering & Remote Sensing, 66(11): 1367-1371. |
Næsset E. 2004. Practical large-scale forest stand inventory using small-footprint airborne scanning laser. Scandinavian Journal of Forest Research, 19: 164-179. DOI:10.1080/02827580310019257 |
Næsset E. 2003. Laser Scanning of forest resources- the Norwegian experience. Proceedings of Scandlaser Scientific Workshop on Airborne Laser Scanning of Forests: 34-41. |
Næsset E. 1997. Estimating timber volume of forest stands using airborne laser scanner data. Remote Sensing of Environment, 61: 246-253. DOI:10.1016/S0034-4257(97)00041-2 |
Nelson R, Swift R, Krabill W. 1988. Using airborne lasers to estimate forest canopy and stand characteristics. Journal of Forestry, 86: 31-38. |
Nelson N. 1996. Estimation of tree heights and stand volume using an airborne lidar system. Remote Sensing of Environment, 56: 1-7. DOI:10.1016/0034-4257(95)00224-3 |
Nelson R, Oderwald R, Gregoire T G. 1997. Separating the ground and airborne laser sampling phases to estimate tropical forest basal area, volume, and biomass. Remote Sensing of Environment, 60: 311-326. DOI:10.1016/S0034-4257(96)00213-1 |
Nilsson M. 1996. Estimation of tree heights and stand volume using an airborne lidar systems. Remote Sensing of Environment, 56: 1-7. DOI:10.1016/0034-4257(95)00224-3 |
Nilsson M, Brandtberg T, Hagner O, et al. 2003. Laser Scanning of forest resources- the Swedish experience. Proceedings of Scandlaser Scientific Workshop on Airborne Laser Scanning of Forests: 42-51. |
Ni-Meister W, Jupp D L B, Dubayah R. 2001. Modeling lidar waveforms in heterogeneous and discrete canopies. IEEE Trans. Geosci. Remote Sensing, 39(9): 1943-1958. DOI:10.1109/36.951085 |
Pang Yong, Li Zengyuan, Sun Guoqing. 2003. A large footprint lidar waveform model for forest. Proceedings of Scandlaser Scientific Workshop on Airborne Laser Scanning of Forests: 59-64. |
Pang Yong, Sun Guoqing, Li Zengyuan. 2004. Effects of forest spatial structure on large footprint lidar waveform. Proceedings of IGARSS04: 4738-4741. |
Parker G, Michael A Lefsky, David J Harding. 2001. Light transmittance in forest canopies determined using airborne laser altimetry and in-canopy quantum measurements. Remote Sensing of Environment, 76: 298-309. DOI:10.1016/S0034-4257(00)00211-X |
Pfeifer N, Gorte B, Winterhalder D. 2004. Automatic reconstruction of single trees from terrestrial laser scanner data. XXth ISPRS Congress
|
Pyysalo U, Hyypp H. 2002. Reconstructing tree crowns from laser scanner data for feature extraction, ISPRS Commission Ⅲ, Symposium
|
Solberg S, Naesset E, Lange H, et al. 2004. Remote Sensing of Forest Health. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. XXXVI, PART 8/W2: 161-166
|
Solodukhin V I, Zukov A J, Mazugin I N. 1977. Laser aerial profiling of a forest. Lew NIILKh Leningrad Lesnoe Khozyaistvo 10: 53-58
|
St-Onge B A, Achaichia N. 2001. Measuring forest canopy height using a combination of LIDAR and aerial photography data. Workshop on Land Surface Mapping and Characterization Using Laser Altimetry, Annapolis, Maryland, USA
|
Sun G, Ranson K J. 2000. Modeling lidar returns from forest canopies. IEEE Transactions on Geoscience and Remote Sensing, 38(6): 2617-2626. DOI:10.1109/36.885208 |
Sun G, Yong Pang. 2005. Evaluation of GLAS Land and canopy elevation (GLA14) data. International Conference on Land-Cover and Land-Use Change Processes in North East Asia Region (LCLUC)
|
Wagner W, Ullrich A, Melzer T, et al. 2004. From single-pulse to full-waveform airborne laser scanners: Potential and Practical Challenges. Proceedings of International Society for Photogrammetry and Remote Sensing XXth Congress, Vol XXXV, Part B/3: 201-206
|
Wulder Mike, Olaf Niemann K, David G Goodenought. 2000. Local maximum filtering for the extration of tree locations and basal area from high spatial resolution imagery. Remote Sensing of Environment, 73: 103-114. DOI:10.1016/S0034-4257(00)00101-2 |
Yu X, Hyyppa J, Kaartinen H, et al. 2004. Automatic detection of harvested trees and determination of forest growth using airborne laser scanning. Remote Sens. Environ, 90: 451-462. DOI:10.1016/j.rse.2004.02.001 |
Zwally H J, Schutz B, Abdalati W, et al. 2002. ICESat's laser measurements of polar ice, atmosphere, ocean and land. Special Issue of Journal of Geodynamics on Laser Altimetry, 34(3-4): 405-445. |