
Failure Modes and Reliability Analysis of Autonomous Underwater Vehicles–A Review
https://doi.org/10.1007/s11804-025-00627-2
-
Abstract
Autonomous Underwater Vehicles (AUVs) are pivotal for deep-sea exploration and resource exploitation, yet their reliability in extreme underwater environments remains a critical barrier to widespread deployment. Through systematic analysis of 150 peer-reviewed studies employing mixed-methods research, this review yields three principal advancements to the reliability analysis of AUVs. First, based on the hierarchical functional division of AUVs into six subsystems (propulsion system, navigation system, communication system, power system, environmental detection system, and emergency system), this study systematically identifies the primary failure modes and potential failure causes of each subsystem, providing theoretical support for fault diagnosis and reliability optimization. Subsequently, a comprehensive review of AUV reliability analysis methods is conducted from three perspectives: analytical methods, simulated methods, and surrogate model methods. The applicability and limitations of each method are critically analyzed to offer insights into their suitability for engineering applications. Finally, the study highlights key challenges and research hotpots in AUV reliability analysis, including reliability analysis under limited data, AI-driven reliability analysis, and human reliability analysis. Furthermore, the potential of multi-sensor data fusion, edge computing, and advanced materials in enhancing AUV environmental adaptability and reliability is explored.Article Highlights● The primary failure modes and underlying causes within each subsystem are examined by categorizing AUVs into six functional subsystems (propulsion system, navigation system, communication system, power system, environmental detection system, and emergency system).● A systematic review of AUV reliability analysis methods is conducted from three perspectives: analytical methods, simulated methods, and surrogate model methods, with an in-depth discussion on the applicability and limitations of each method.● Key challenges and research hotpots in AUV reliability analysis are identified from three perspectives: reliability analysis under limited data conditions, artificial intelligence-driven reliability analysis, and human reliability analysis.● The study explores the potential of multi-source information fusion, edge computing, and advanced materials in enhancing the reliability of autonomous underwater vehicles. -
1 Introduction
Since the birth of unmanned underwater vehicles (UUVs) in the 1960s, it has experienced great development. In recent twenty years, UUVs have also entered the fast lane of development similar to the rapid development of unmanned aerial vehicles (UAVs). As a category of intelligent apparatus predominantly deployed from submarines or surface ships, UUVs are capable of long-duration autonomous underwater navigation and recovery (Sahu and Subudhi, 2014). Currently, there is a growing utilization of UUVs due to their autonomous capabilities, adaptability, and multifunctionality. They exhibit exceptional maneuverability, demonstrated adaptability, and high survivability, while also reducing the risk of personnel injury. Furthermore, they are cost-effective in terms of both production and maintenance. Based on their autonomy levels, UUVs can be classified into two categories: remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs).
ROVs are unmanned underwater robots that are controlled by an operator aboard a vessel or onshore (Nitonye et al., 2021). ROVs are typically tethered to the surface by an umbilical cable that provides power and allows for realtime control and data transmission. ROVs are equipped with cameras, sensors, and various tools to perform tasks such as inspection, maintenance, and repair of underwater structures, exploration, scientific research, and military operations. AUVs are robotic devices equipped with integrated computers that facilitate independent operation and navigation, free from external command or human piloting. They are distinguished by their prolonged operational endurance, high efficiency, and extensive survey range. AUVs are deployed in four typical working environments: open water, under ice, nearshore and coastal areas, and deep sea, as shown in Figure 1. Given its ability to navigate autonomously beneath the water's surface and its versatility in accommodating customizable payloads, AUV emerges as an optimal instrument for a diverse array of purposes, including underwater archaeology, military applications, and oceanographic observations (Brito et al., 2010). AUVs are capable of operating in a diverse range of underwater contexts, from open ocean to coastal proximities. Their operational scope is broadening to include more challenging non-benign environments, such as areas beneath sea ice or along rugged coastlines, which inherently increases the potential risk of AUV loss (Brito et al., 2012). ROVs don't rely on battery power but are connected to surface vessels by umbilical cables, thereby avoiding mission interruptions caused by battery failures. Additionally, ROVs are controlled in real-time by operators on the surface, allowing for rapid adjustments and problem-solving in the event of unexpected situations. This human intervention significantly enhances the success rate of missions and the safety of the equipment. In contrast, AUVs rely on battery power, making success rate and equipment safety dependent on battery performance. Although AUVs have greater autonomy since they are not limited by the umbilical cable length or the mother ship's position, their communication capabilities are limited when operating underwater. This limitation prevents operators or monitoring teams from promptly obtaining status information, thereby increasing the risks AUVs face in complex environments and reducing their reliability to a certain extent.
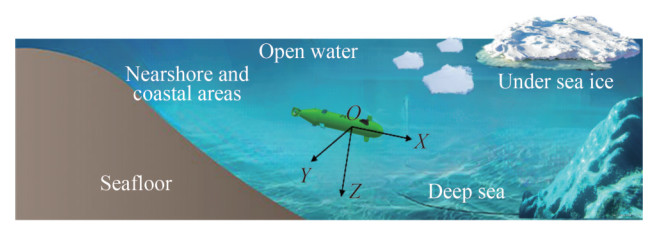 Figure 1 Typical working environments of an AUV
Figure 1 Typical working environments of an AUVTherefore, this article focuses on the reliability analysis of AUVs to ensure their safe and stable operation in complex environments.
Over the years, there have been recorded incidents of underwater vehicle loss during operation, as shown in Figure 2. For example, the Japanese AUV "KAIKO" suffered a malfunction and descended to the depths of the Pacific Ocean during a marine research mission in May 2003. To date, it remains unrecovered (Momma et al., 2004). In February 2005, the "Autosub-2" AUV was lost during its third Antarctic mission when the accompanying research vessel could not retrieve it due to substantial ice coverage. The AUV was trapped under the Antarctic ice until its batteries were exhausted. Investigators from the National Oceanography Centre in Southampton have posited that a hardware malfunction could have interrupted the power supply, leading the AUV's artificial intelligence navigation system to attempt surfacing prematurely. Consequently, the AUV became irretrievably lodged beneath the ice layer (Strutt, 2006). Another lost vehicle, the American AUV "Autonomous Benthic Explorer" (ABE), a pioneering vehicle within the US scientific community, represented a significant milestone in underwater robotics (German et al., 2008). Unfortunately, ABE was lost in March 2010 during its 222nd research dive off the Chilean coast. Subsequent analysis suggests that the likely cause of the loss was the implosion of a glass float rated for pressures up to 3000 m. This initial failure was believed to have set off a cascading failure, leading to the implosion of the remaining glass floats. Such a catastrophic event would have resulted in the instant loss of all onboard systems, including communication with the surface vessel and the vehicle's recovery mechanisms. The hybrid ROV "Nereus" was reported lost during a scientific expedition within the Kermadec Trench, located northeast of New Zealand, in 2014. This vehicle was operational at a significant depth of approximately 9 900 m when communication ceased. Subsequent analyses by researchers suggested that akin to the earlier incident with the "ABE", the loss of "Nereus" may have been attributed to the failure of its buoyancy materials. These materials presumably imploded due to the immense pressure of the deep-sea environment, a hypothesis consistent with the known challenges posed by such extreme underwater conditions (Bowen et al., 2009; Bowen et al., 2008; Whitcomb et al., 2010). In March 2017, the Chinese AUV "Hai Dou" suffered a malfunction and descended to the ocean floor during an abyssal operation as it was preparing for its return journey. More recently, the "Hugin" AUV encountered a loss during its inaugural under ice mission in the Antarctic in January 2019 (Chen et al., 2021). Fortunately, the AUV was successfully retrieved from the seabed after four days. Before the dive, comprehensive pre-dive inspections were carried out on the vehicle, which showed no irregularities. It was suspected that the AUV became ensnared under an ice floe, which led to the disruption of its iridium positioning signal reception.
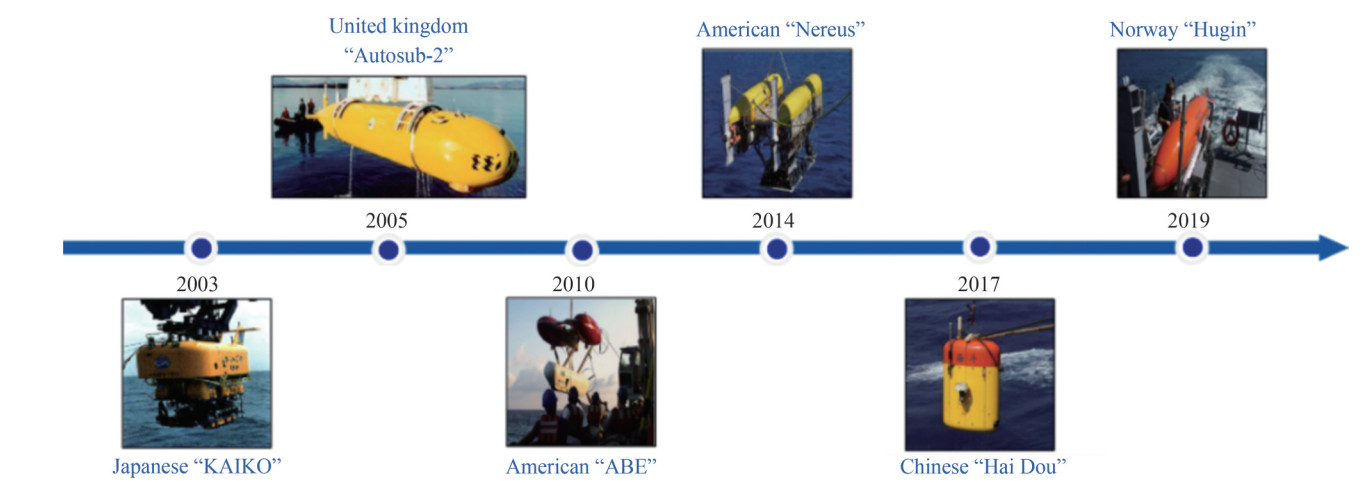 Figure 2 Historical accidents of underwater vehicle loss
Figure 2 Historical accidents of underwater vehicle lossAUVs operate within an intricate matrix of environmental stressors, experiencing the coupled effects of wind, wave, and current loads. These vehicles must also withstand the corrosive marine aerosol environment and mitigate issues arising from biological fouling. Consequently, the operational environment for AUVs is challenging (Brito et al., 2010; Yang et al., 2023b). The complexity intrinsic to AUV systems, augmented by the possibility of human error in operation, engenders an evident level of uncertainty and unpredictability in the reliability of AUVs over their operational lifespan. This underscores the importance of conducting thorough reliability analysis and implementing effective reliability assessment measures on AUV (Yang et al., 2023b). Figure 3 shows the concrete logic of reliability analysis of AUV.
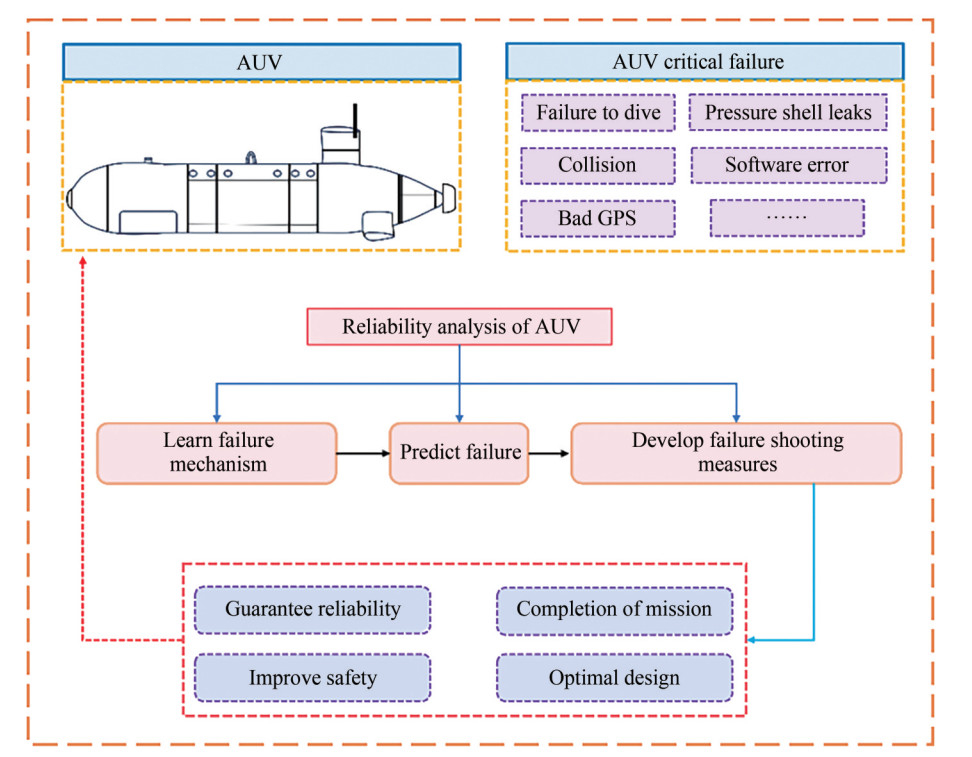 Figure 3 The concrete logic of reliability analysis of the AUV
Figure 3 The concrete logic of reliability analysis of the AUVReliability refers to the ability of a product to perform a specific function under set conditions for a designated period of time (Liu et al., 2020). Within the realm of safety, conducting a reliability analysis is vital for determining the likelihood of system failure and for assessing the efficacy of safety measures. Modern technological systems are safeguarded through the deployment of multiple layers of defense to mitigate potential risks. These protective layers include a range of elements such as hardware, software, human interaction, and organizational measures (Zio, 2009; Agbakwuru et al., 2023). To effectively address these diverse elements, a comprehensive and integrated approach is essential for the analysis of system reliability.
An inherent concern in reliability analysis revolves around the uncertainties associated with both the occurrences and consequences of failures (Zio, 2009). AUVs and autonomous cars share many similarities in technical implementation and system architecture. Both rely on various sensors for environmental perception and positioning and utilize intelligent control systems for autonomous decision-making. Therefore, some insights could be obtained by analyzing reliability research results of autonomous cars. Autonomous cars are attracting widespread global attention and are seen as an inevitable trend in transforming future transportation (Gandoman et al., 2019). The reliability and safety of autonomous cars are crucial performance indicators, directly related to their lifecycle performance in practical applications (Wang et al., 2022). As typical complex systems, AUVs and autonomous cars consist of multiple components and subsystems that involve different physical processes and interactions. This complexity within AUVs and autonomous cars models profoundly impacts accurate modeling, necessitating a greater demand for data and presenting challenges in processing and managing substantial data volumes. Despite facing different specific issues, AUVs and autonomous cars often employ similar techniques and methods such as Markov Models, State space method, and Monte Carlo Simulation method in their reliability analysis. AUVs and most autonomous cars rely on battery power. Nowadays, malfunctions and breakdowns of electric parts and the imperfections of the battery stand for 54% of all cars breakdowns (Wang et al., 2018a). And some studies have demonstrated that over 50% of AUV loss incidents are attributed to power failures (Li and Yang, 2010; Yu et al., 2017). Batteries are one of the most essential components of AUVs and autonomous cars. The significant differences are shown in below aspects: AUVs primarily operate in complex and variable underwater environments, where reliability analysis must address natural factors such as underwater pressure, temperature, and currents. When operating in underwater environments, AUVs must withstand significant water pressure and face challenges of corrosion. These extreme conditions impose strict requirements on the corrosion resistance and pressure resistance of AUV materials. In contrast, autonomous cars contend with complex and variable factors such as road conditions, inter-vehicle information exchange, and pedestrian safety. The working environment of autonomous vehicles is equally complex and may encounter more collisions. Compared to AUVs, autonomous vehicles are more influenced by human factors.
As the research of AUVs has gradually matured, the imperative analysis for reliability has grown, which ensures the secure operation of AUVs and facilitates informed decision-making during emergencies (Madsen et al., 2000; Brito et al., 2014; Bian et al., 2009a; Wang et al., 2021; Wróbe et al., 2018; ). There has been lots of research devoted to the reliability analysis of AUV. Numerous researchers have already conducted studies on how to enhance the reliability of AUVs from a technical perspective, and they have achieved significant results. For instance, improving the overall reliability of AUVs necessitates a focus on the importance of actuator mechanisms. As a result, researchers have aimed at diagnosing faults within AUV actuators. Jiang et al. (2019) have employed Finite Impulse Response (FIR) and Principal Component Analysis (PCA) techniques to address the challenge of fault diagnosis in AUV actuators suffering from winding faults. In the realm of AUV power systems, extensive researches have been undertaken to explore the failure mechanisms and modes of batteries. The widespread adoption of soft-packaged lithium-ion batteries as the energy source for AUVs can be attributed to their high safety profile, superior energy density, and minimal self-discharge rates. In the research conducted by Li et al. (2022b), a comprehensive examination of the electrochemical performance of cells under varying hydrostatic pressures was undertaken. The study effectively developed a predictive model for capacity loss under high hydrostatic pressure based on the Arrhenius law. This advancement significantly enhanced the understanding of cell discharge mechanisms in such conditions. Effective battery thermal management (BTM) is crucial for ensuring the safety and reliability of AUVs, particularly when operating at high speeds. Li et al. (2022a) introduced a nanoparticle/phase change material (nano-PCM) composite for the BTM of an AUV. The insights gained from these studies may inform the reliability analysis of AUV battery packs. AUV endure substantial impact loads during interactions with water currents, collisions and potential shark attacks, which can lead to elastoplastic deformation and potential breakage or damage to the hull. These incidents pose a considerable risk to the AUV's safety and reliability. Shi et al. (2019) designed a mitigator to reduce the impact load of the AUV entering the water. To investigate the mitigator's damping characteristics, numerical simulations were performed using the explicit finite element method coupled with an Arbitrary-Lagrangian-Eulerian (ALE) solver. Model accuracy was confirmed through comparison of simulation outcomes with experimental data from the water entry of a small sphere. The model's accuracy was confirmed by comparing the simulation results with experimental data from the water entry of a small sphere. In a separate investigation (Li et al., 2021a), the focus was on optimizing the design of the AUV's head pressure for minimal weight while incorporating reliability requirements. The pressure hull featured a grid sandwich structure to attain a lightweight build. These results are valuable for developing crashworthy designs and analyzing underwater weapon impacts, thus enhancing the AUV hull's reliability.
The studies mentioned above have predominantly focused on the impact of technical factors on the reliability of AUVs. However, the reliability of AUVs is affected by a multitude of factors. In recent years, more scholars have begun to explore the impact of environmental conditions, human factors, and their cumulative effects on AUV reliability. As a major research direction in the interdisciplinary field of human factors engineering, the safety of complex systems concerning human factors has gained growing recognition in academia (Mkrtchyan et al., 2015; Zarei et al., 2021). In (Loh et al., 2020b), a systems-based risk analysis framework was introduced, utilizing system dynamics methodology to overcome existing limitations. This framework was applied to an active AUV program, focusing on analyzing incidents of human error during Antarctic deployments. Simulations using the developed risk model indicated a steady reduction in the rate of human error incidents as the AUV team's experience grew. In a related study (Thieme et al., 2015), a risk management framework (RMF) for UUV was proposed. This framework emphasized the significance of considering the impact of human and organizational factors on risk. The RMF offered a systematic approach to evaluate the probability of loss, the likelihood of mission abort for an AUV, and possible strategies to mitigate risks. Implementing the RMF is expected to improve the overall reliability of UUV operations.
An in-depth review of the literature reveals significant progress in the field of reliability analysis of AUVs. Reliability analysis techniques used for AUVs are divided into analytical methods, simulated methods, and surrogate model methods. Analytical methods are used for identifying potential failure modes and their logical relationships. However, they face challenges in accurately predicting and analyzing unknown faults and lack sufficient quantitative assessment capabilities. Simulated methods have advantages in analyzing the impact of uncertainty and stochasticity on reliability in AUV systems. However, these methods face challenges in real-time analysis of dynamic system changes and are often computationally demanding when processing largescale data. Surrogate model methods are widely used in AUV hydrodynamic design optimization and fault diagnosis, among other applications. However, these methods demand extensive high-quality data, and the limited availability of such datasets in AUV reliability analysis significantly restricts their accuracy.
Current studies cover critical areas including battery safety, structural durability, and optimization design, as well as human reliability analysis. Despite these advancements, several unresolved issues remain. Firstly, the limited number of AUVs available for scientific investigations constrains the datasets used for reliability analysis, thus restricting the depth and breadth of research. Secondly, with the rapid advancement of computer science, AI-based reliability analysis techniques have emerged as a research focus in the AUV reliability analysis field, owing to their high accuracy and real-time capabilities. Additionally, human reliability analysis of AUV has been another current research hotspot.
Although some researches have been conducted on AUV reliability, there is a notable lack of review articles that examine the development trends and emerging research areas in this field. A literature search yielded only a single review focused on risk analysis for AUV operations. In 2021, Chen et al. (2021) published a comprehensive review on the subject, offering a structured and systematic examination of risk analysis studies pertaining to AUV operations. Based on an extensive analysis of the existing literature, the review identifies several key issues and has encouraged researchers globally to further investigate the risk analysis aspects of AUVs.
It is important to note that reliability and risk are two distinct yet interconnected concepts, each with different goals and emphases. Reliability analysis constitutes a systematic process that encompasses the gathering, characterization, and structuring of reliability data. This is succeeded by the generation of trustworthy analytical outcomes through the application of scientific and logical modeling techniques (Rackwitz, 2001). The primary aim of this process is to identify the intrinsic properties of failures, predict their incidence, and develop appropriate strategies for their prevention (Melchers and Beck, 2018). Risk pertains to the extent of potential harm due to uncertainties within a system over a given time frame. It is assessed through a scientific approach that relies on data, operational experience, and intuitive insight. By quantifying risk, this method seeks to effectively distribute scarce resources to substantially diminish the risk. Given the paucity of publications explicitly delineating the distinction between reliability and risk, we have synthesized the differences using references (Zio et al., 2009; Wang et al., 2022; Wróbel et al., 2018; Aven and Nøkland, 2010), leading to the following conclusions: 1) Reliability analysis is centered on assessing system performance and identifying vulnerabilities, with the goal of improving the system's capability to function without failure under specified conditions. In contrast, risk analysis focuses on the identification and assessment of potential events that may result in financial, safety, or environmental harm, and formulating strategies to mitigate the likelihood or consequences of such events. 2) The primary concern of reliability is the consistency and safety of a system when operating under predefined circumstances, whereas risk addresses the evaluation of unpredictable elements that may compromise system performance or lead to losses. 3) Both reliability and risk analysis are dedicated to comprehending and minimizing the chances of system failures or losses. Although there are differences between reliability and risk, the methodologies of reliability and risk analysis often share commonalities, with both fields frequently utilizing similar techniques such as Fault Tree Analysis (FTA), Bayesian Belief Networks (BBN), and Markov analysis to identify and alleviate potential problems within systems.
Although Chen et al. (2021) represents the most comprehensive review in the field of AUV risk analysis to this point, it is important to recognize the clear distinction between reliability and risk analysis. Presently, the academic literature is devoid of a systematic review that concentrates exclusively on AUV reliability analysis. The motivation of this study is to unfold the state of knowledge structure by combing the published articles and provide insight for further development. The contribution of this research is three aspects. Firstly, it uncovers the failure modes and causes of AUV. Secondly, it constructs a framework for understanding the reliability analysis methods of AUVs on the bases of reliability studies. Thirdly, it identifies current research challenges and hotspots in the field of AUV's reliability. Taking these aspects into account, this review article seeks to provide an updated, broader, comprehensive, and prospective outlook for individuals engaged with AUVs.
The search strategy concentrated on leveraging the Web of Science database as the principal repository, owing to its stature as a comprehensive scholarly information resource encompassing an extensive array of academic fields. Nevertheless, acknowledging the potential for a significant body of literature on AUV risk and reliability that may not be indexed within the Web of Science, the search parameters were broadened to encompass additional databases including Google Scholar, EI, and IEEE. This broader search approach aimed to capture a more comprehensive range of relevant literature beyond what is available in Web of Science.
The literature search inputted the following keywords:
((Underwater vehicle) OR (Autonomous underwater vehicle))
AND
((Reliability analysis) OR (Reliability assessment) OR (Reliability model) OR (Safety measures) OR (Machine learning) OR (Human reliability analysis) OR (Intelligent reliability analysis) OR (Data-driven method) OR (Failure)).
By utilizing these keywords, the search aimed to identify relevant studies and publications that address the different dimensions of reliability related to AUVs. Then, data processes are performed to sift out what is just relevant logically.
The final retrieval comes out 347 articles including different sources from Web of Science, IEEE, and Google Scholar. After converting the file to ZOTERO software, 92 duplicated manuscripts among these databases were excluded. After that, a preliminary screening strategy was performed to pick up those irrelevant studies. For example, Li et al. (2023b) presented a comprehensive literature review focused on maritime autonomous surface ships (MASS) safety and reliability-related technology. Nevertheless, this paper focused on the reliability analysis of AUVs. Other studies, such as Zhou et al. (2021) and Hien et al. (2018) were mainly centered on the optimization of controllers and multi vehicles. As a result, these articles were removed.
Next, we screened the remaining articles based on their specific research objectives related to underwater vehicles and reliability analysis. For example, Allotta et al. (2017) presents a preliminary design and simulation proposal for wireless power recharging for underwater robotics, which can drastically simplify recharge operations in underwater environments at abyssal depths (thousands of meters). This study was included as it aligns with our criteria of enhancing operational efficiency and reliability in challenging underwater conditions. However, the primary motivation of this study is to unfold the current state of knowledge by synthesizing the published articles and to provide insights for further advancements in the field. Hence, such articles were also removed from the sample. Finally, 150 papers remained for further analysis.
After getting the final papers, the text was manually coded based on themes, and the publications were categorized into different topics or fields such as reliability analysis, reliability literature review, reliability assessment, and reliability management. The approach enabled the identification of common patterns and trends in the data. It also provided insights into the prevalent research topics in the field, identified the limitations of existing studies, and suggested potential future research directions.
The article is structed as follows. In section 2, the failure modes and causes of AUV are described. Section 3 introduces the existing methods employed for AUV reliability analysis, categorizing them into three types: analytical methods, simulated methods, and surrogate model methods. Section 4 outlines current research challenges and hotspots. Section 5 provides the summary and conclusion of this study.
2 Failure modes and causes of the AUV
The AUV is a multifunctional product with a complex mission profile, which complicates the identification of potential failure modes (Brito et al., 2010; Yang et al., 2023b).
In this section, the AUV is decomposed into six subsystems, and a thorough analysis of the failure modes and causes of the primary components within each subsystem is presented. Additionally, this section elucidates the effects of these failure modes.
2.1 The structure of the AUV
Taking a scientific exploration AUV as an example, the mission profile of an AUV is shown in Figure 4. The mission profile of a scientific exploration AUV is divided into: AUV device check, AUV deployment phase, AUV diving phase, AUV cruise phase, AUV retrieval phase, AUV maintenance phase.
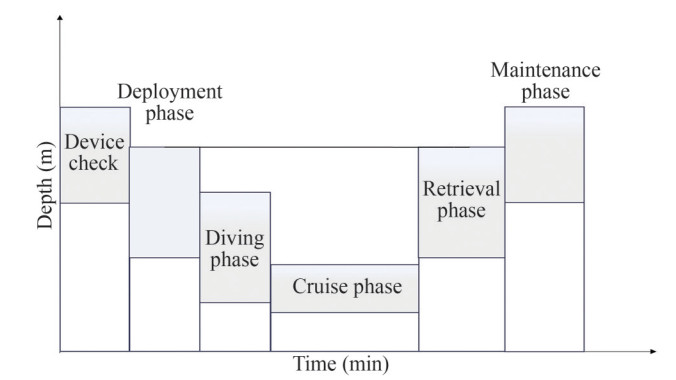 Figure 4 The mission profile of the AUV
Figure 4 The mission profile of the AUVIn the deployment phase of AUV, potential failure modes include the breaking of the lifting cable and collisions between the AUV and the mother ship. During the underwater cruise phase on the planned trajectory, the AUV may become unstable due to strong and unstable currents, poten tially leading to equipment damage. Additionally, it may face potential failure modes such as DVL failure and water ingress in the seals. During the retrieval phase, potential failure modes include the breaking of the lifting cable and personnel falling into the sea. A typical AUV system consists of propulsion system, navigation system, communication system, power system, environmental detection system, and emergency system. According to Byun et al. (2022), the structure of an AUV is shown in Figure 5. The propulsion subsystem is integral to an AUV, tasked with generating thrust, regulating the AUV's velocity and agility, ensuring adherence to the predetermined trajectory, controlling depth and orientation, and sustaining the AUV's operational endurance. The navigation subsystem is tasked with ascertaining the vehicle's precise location, orientation, and course under the water. It facilitates meticulous navigation, exact positioning, and strategic trajectory plotting and management, all the while safeguarding the AUV's operational safety and dependability during its missions. The communication subsystem is to maintain uninterrupted contact between the AUV and external parties, facilitating missions that are both efficient and effective, as well as optimizing data gathering and the decision-making process. The power subsystem is responsible for ensuring a consistent supply of electrical power, which is crucial for the AUV's various functions including operation, data acquisition, communication, and the fulfillment of mission goals, all while prioritizing efficiency, safety, and redundancy. The environmental detection subsystem is responsible for enabling AUV to conduct environmental evaluations, recognize and circumvent obstacles, monitor biodiversity, create bathymetric maps, and execute additional tasks crucial for comprehending and interacting with the marine environment. The emergency subsystem is used to protect the AUV and improve its chances of enduring unexpected situations or emergencies, additionally streamlining recovery and rescue efforts.
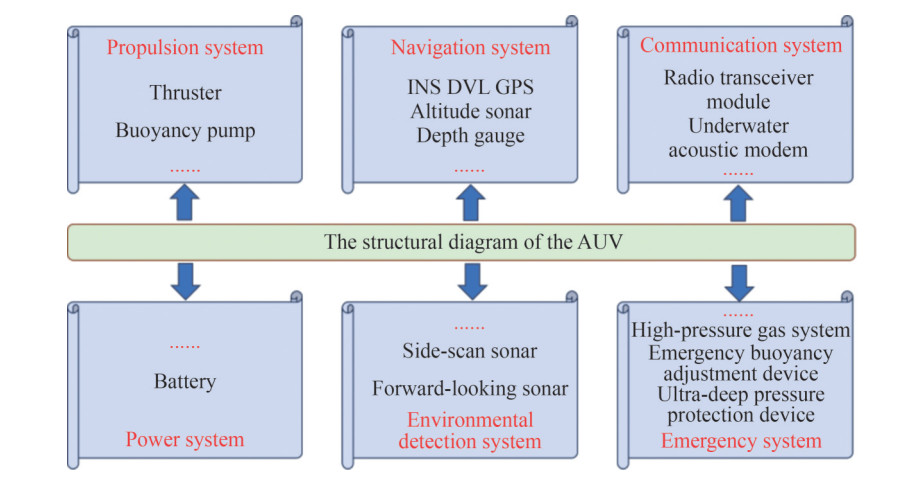 Figure 5 The structural diagram of the AUV
Figure 5 The structural diagram of the AUV2.2 Failure modes and causes of subsystems
2.2.1 Propulsion subsystem
The role of propulsion subsystem is mainly include two aspects: generating thrust and altering buoyancy. For actively propelled AUVs, thruster is an essential power component. In comparison to other equipment on AUVs, the thruster operates at high pressure and high salinity for extended periods under heavy loads. It serves as the primary and most heavily loaded component (Zhu et al., 2021). When a thruster experiences failure, it invariably leads to a substantial deterioration in the performance of the propulsion system, rendering AUV incapable of fulfilling its designated operational tasks (Gao et al., 2023). Furthermore, such failure may exert deleterious effects on the safety and reliability of the AUV. Given the increasing deployment of AUVs in arduous environments such as polar regions and deep sea, the likelihood of thruster failure escalates (Brito et al., 2010). A comprehensive analysis of the principal failure modes and resultant consequences of thrusters, coupled with a discerning identification of the underlying causes of malfunctions, assumes paramount significance (Zhu et al., 2021). Such an analytical approach is essential for significantly enhancing the reliability and safety of the AUV when faced with the rigorous conditions present in these environments. Table 1 shows the typical failure modes and causes of thruster.
Table 1 The typical failure modes and causes of thrusterFailure modes Failure effects Failure causes Thruster jamming (Insulated gate bipolar transistor, IGBT) broken Fishing net entanglement, collision Thrust derating Thrust reduction Collision, gear box wear Thruster blades and parts lost Thruster lose ability Design flaw, strong collision, aging of connector 2.2.2 Navigation subsystem
The navigation subsystem enables an AUV to adhere to a predetermined trajectory by continuously monitoring its position, attitude, and velocity, which ensure the AUV's safety and reliability during its missions (Paull et al., 2014). GPS is a satellite-based positioning system which can provide accurate and real-time global positioning information (Chen et al., 2021; Thieme et al., 2015; Bhatti and Ochieng, 2007; Wang et al., 2008). Inertial Navigation System (INS) is one of the widely used navigation systems based on the principles of inertia, used to measure and track the position, orientation, and velocity of moving objects (Bhatti and Ochieng, 2007; Wang et al., 2008; Donovan, 2012; Onyekpe et al., 2021). DVL plays a crucial role in underwater navigation by providing real-time velocity measurements (Zhu et al., 2022a). The depth gauge is employed to measure the depth of underwater objects or terrain, aiding in the determination of underwater topography and ensuring that AUV maintains an appropriate depth during mission execution. Altitude sonar is deployed to carry out exact altitude measurements near the water's surface, thereby safeguarding the AUV from collisions or damage as it ascends to or operates close to the surface (Luan, 2005). Table 2 shows typical failure modes and causes of navigation subsystem.
Table 2 The typical failure modes and causes of navigation subsystemFailure modes Failure effects Failure causes Gyroscope or accelerometer failure Increasing navigation errors, mission fail Collision, human installed error, environmental interference DVL antenna and sensor failure Increasing navigation error, deviating from the planned path Electromagnetic interference, design flaw Depth gauge's pressure sensor damage Affecting the accurate acquisition of information Environmental interference, collision, design flaw Altitude sonar's abnormal signal transmission or reception Low accuracy in measurement results Calibration error, harsh environment, sensor damage GPS can't receive satellite signals, antenna failure Inaccurate positioning, signal loss Ice adhesion, hardware aging, design flaw 2.2.3 Communication subsystem
The role of a communication subsystem is to facilitate the exchange of information between different entities, enabling the transmission and reception of data (Hegde et al., 2018). The main components are radio transceiver module and underwater acoustic modem. For underwater communication, underwater acoustic modems are designed specifically for transmitting and receiving data through sound waves in the water and above-water communication is accomplished by local radio or satellite communication with an antenna (Zhuo et al., 2020). Table 3 shows typical failure modes and causes of communication subsystem.
Table 3 The typical failure modes and causes of communication subsystemFailure modes Failure effects Failure causes Underwater acoustic modem can't receive or transmit signals AUV signal loss, mission fail Collision, human installed error, environmental interference Radio transceiver module can't receive or transmit signals Loss of Communication ability Electromagnetic interference, design flaw, collision 2.2.4 Power subsystem
A power subsystem is used to supply electrical energy for AUV through lithium-ion batteries or alkaline batteries (Yu et al., 2017). The battery is one of the most important components in AUV. The AUV relies on battery to provide power, driving the propulsion system, control system, and various sensors (Kaliaperumal et al., 2021). The performance and stability of the battery pack directly impact the AUV's endurance and the effectiveness of mission execution (Belov and Yang, 2008; Lyon and Walters, 2016). Table 4 shows typical failure modes and causes of battery.
Table 4 The typical failure modes and causes of batteryFailure modes Failure effects Failure causes The negative electrode of the battery forms lithium dendrites Dendrite penetration through the separator causing an internal short circuit Instability in the composition of the electrolyte, battery polarization, design flaw improper operation Copper particles or dendrites form on the battery's negative electrode Increased internal resistance, reduced power, decreased operating current density Battery Overcharging or over-discharging, uneven current distribution, electrolyte composition issues, material flaws Gas generation and swelling of the battery at the positive electrode Reduced capacity and power Battery overcharging or over-discharging, material flaws Perforation of the battery separator Increased internal resistance, reduced power, decreased operating current density External pressure, assembly errors, internal short circuits Decrease in lithium-ion concentration in the electrolyte Increased internal resistance Internal sealing flaws, material flaws Corrosion of external leads attached to positive and negative terminals Voltage decline Material flaws, electrolyte corrosion Short circuit Voltage decline Material flaws, electrolyte corrosion 2.2.5 Environmental detection subsystem
The environmental detection subsystem of an AUV serves a critical role in underwater missions by monitoring and analyzing various parameters such as water temperature, salinity, pressure, and current velocities (Chen et al., 2021). The gathered environmental data is transmitted in real-time, enabling operators to monitor and analyze mission progress. Sidescan sonar is commonly employed for tasks such as seafloor mapping, target detection, and under water resource exploration (Petrich et al., 2018). Forwardlooking sonar is primarily used for detecting, tracking, and locating underwater targets such as obstacles, schools of fish, or other objects (Zhou et al., 2022; Zhang et al., 2019c). Cameras serve as indispensable tools in facilitating the navigation, target identification, and task execution capabilities of AUVs by offering real time visual feedback. Table 5 shows typical failure modes and causes of environmental detection subsystem.
Table 5 The typical failure modes and causes of environmental detection subsystemFailure modes Failure effects Failure causes Forward-looking sonar failure AUV is unable to provide timely warnings or take evasive actions Physical damage such as impact or collision, sensor damage, software malfunction Side-scan sonar failure Decreased target detection capability Physical damage such as impact or collision, sensor damage, design flaws Camera pollution or damage Decreased detection capability Physical damage such as impact or collision, aging of connection lines 2.2.6 Emergency subsystem
The emergency subsystem is to ensure the safety and proper functioning of AUV in emergencies. It allows AUV to respond appropriately and minimize risks, safeguarding both the AUV itself and any associated equipment or personnel (Chen et al., 2018b). The ultra-deep pressure protection device provides pressure protection for AUVs in deep-sea environments, ensuring their ability to perform tasks in extremely deep waters while safeguarding the integrity of the equipment. The emergency buoyancy adjustment device is used to adjust the buoyancy of the AUV in emergencies, ensuring its safe return to the water surface (Wang et al., 2018b; Choyekh et al., 2016). The high-pressure gas system of the AUV can be utilized for rapid emergency buoyancy ascent in emergencies, enabling the AUV to swiftly surface for urgent rescue. Table 6 shows typical failure modes and causes of emergency subsystem.
Table 6 The typical failure modes and causes of emergency subsystemFailure modes Failure effects Failure causes Seal failure, pressure sensor malfunction, and actuator failure in ultra-deep pressure protection device The survival probability of AUV decreases in emergencies Design flaws, human error, seal aging and damage Emergency buoyancy adjustment device failure The survival probability of AUV decreases in emergencies Human error, design flaws, mechanical components damage Pressure leakage in high-pressure gas system The survival probability of AUV decreases in emergencies High-pressure gas cylinder damage, valve failure The preceding sections analyze the potential failure modes and causes of six subsystems within an AUV. Several failure modes are related. For example, failures in the power subsystem can render the entire AUV inoperable, leading to mission failure and potentially resulting in the loss of the AUV. Furthermore, failures in the environmental detection subsystem's sensors can prevent the navigation subsystem from acquiring accurate data, thus impairing the AUV's positioning and path planning. Similarly, failures in the propulsion subsystem may cause the AUV to deviate from its intended path, increasing the burden on the navigation subsystem and potentially leading to its overload. Therefore, understanding and addressing the interdependencies among these failure modes during the design and maintenance phases is essential to enhance the AUV's reliability and safety. An early investigation analyzed 63 mission aborts out of 205 glider missions and identified 19 failure modes. As shown in Figure 6, power failure is the second most common failure mode (Brito et al., 2014). The power system is critical as it supplies energy to all electrical motors, sensors, and the central computer, thereby ensuring the normal functioning of AUVs. Additionally, it significantly impacts mission endurance, which is contingent upon available energy storage and the rate of energy consumption. Given its fundamental role, addressing power system reliability is paramount to improving overall AUV performance and mission success rates.
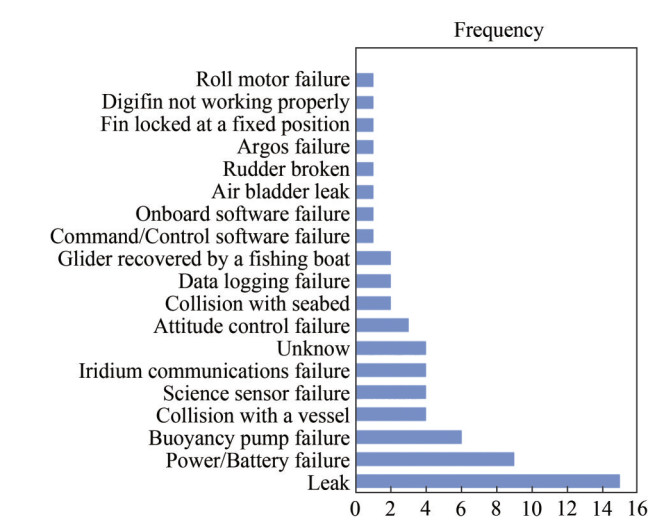 Figure 6 Failure modes and their frequency during 63 abort incidents from 205 glider missions (Brito et al., 2014)
Figure 6 Failure modes and their frequency during 63 abort incidents from 205 glider missions (Brito et al., 2014)3 Reliability analysis methods of AUVs
This section aims to present an overview of the historical advancements in reliability analysis methodologies and models for AUVs, assess the achievements and limitations of previous research, and identify emerging research directions for future investigations in this domain.
In recent years, extensive research endeavors have been dedicated to advancements in reliability analysis, risk assessment, and risk analysis for underwater vehicles. These advancements have led to the establishment of numerous theories and analytical methodologies. Chen et al. (2021) provided an overview of existing methods for risk analysis of AUV operations aiming to help researchers gain a better understanding of historical developments for AUV risk analysis methods. The authors categorized the reviewed methods into qualitative, semi-quantitative, and quantitative methods. It can be concluded that the utilization of quantitative methods in research has experienced rapid growth in recent years. Furthermore, these quantitative methods are increasingly being adopted in the risk analysis of AUVs. Some studies categorized the reviewed reliability analysis methods into numerical simulation methods, agent model methods, and mathematical analysis methods. It has been observed that each analytical method has its distinct scope of applicability and strengths and weaknesses. In summary, when assessing the reliability of a system, it is essential to select an appropriate reliability analysis method based on the characteristics of the system under study.
Classical reliability theory has developed upon the premise of probability (which posits that the failure states of systems or components can be characterized using probability functions) and binary states (which presupposes that the systems or components under examination possess only two states: failed or functioning correctly). Nevertheless, the reliability theory formulated based on probabilistic assumptions and binary state models has revealed considerable limitations in accurately representing fuzzy systems and component polymorphism. Furthermore, it fails to precisely illustrate the correlation between a system's actual performance and its reliability (Zio, 2009; Li et al., 2023a; Li et al., 2023b). To tackle these challenges, supplementary methodologies have been introduced to enhance traditional classical reliability evaluation practices. These include fuzzy system reliability assessment methods (Loh et al., 2020b), reliability assessment methods for polymorphic systems, and reliability analysis methods for multistage task systems.
In this section, the reviewed methods are divided into analytical methods, simulated methods, and surrogate model methods. The classification of major reliability analysis methods regarding AUV is shown in Table 7. In the following sections, prevalent techniques related to the analysis of reliability in AUVs will be elaborated upon.
Table 7 Classification of major reliability analysis methods regarding AUVsAnalytical methods Decision diagram Fault tree analysis Universal generating function State space methods Simulated methods Monte carlo Markov chain Subset simulation Surrogate model methods Response surface methodology Support vector machines Artificial neural networks Kriging 3.1 Analytical methods for reliability analysis of AUV
The analytical methods rely on the configuration of the system under study, the condition of its components, and the logical interconnections among these components to construct and examine a reliability assessment model (Odeyar et al., 2022; Shi et al., 2018). The principal analytical methods encompass Decision Diagram techniques, FTA, Universal Generating Function (UGF), and State Space Methods. In 1968, the American scientist C.A. Cornell introduced the Mean Value First-order Second Moment (MVFOSM) method, noted for its relative simplicity and comprehensibility (Cornell, 1969). This method has been widely applied in the field of civil engineering. However, for different functional forms of the same problem, it is challenging to obtain consistent reliability results with MVFOSM. Furthermore, MVFOSM tends to show considerable estimation errors when applied to highly complex functions or in cases with substantial coefficients of variation. An analysis of reliability through the first-order reliability method indicates that the engineering quality fails to meet acceptable standards. As a result, a Six Sigma design approach was adopted, integrating uncertainty optimization to improve the overall design robustness. A methodology was introduced aiming at optimizing energy efficiency via an approach based on spacing configurations for a pair of AUVs in Liang et al. (2020). The objective is to minimize hydrodynamic resistance by examining the interplay between hull forms and propeller interactions. Liang et al. (2020) examined and categorized the relevant factors contributing to drag reduction, presenting the most efficient fleet configuration to maximize energy savings and corroborate previous experimental observations. An extensive analysis of energy considerations leads to the identification of the optimal fleet arrangement, which exhibits remarkable flexibility and dependability. These insights are of significant value to decision-makers.
FTA is a deductive methodology utilized for analyzing failures, functioning in a top-down approach. This method proficiently assesses the failure modes and root causes of diverse components within large and complex systems. The following formulas and concepts form the basic methods of fault tree analysis.
1. Basic Event Probability Calculation
A basic event is the smallest fault unit in fault tree analysis. The probability of each basic event is usually obtained through historical data or experiments and is denoted as P(Ei).
2. Top Event Probability Calculation
The top event is the final fault state in fault tree analysis, and its probability is determined by the combination probabilities of basic events. Common combination methods include series (AND gate) and parallel (OR gate).
1) AND Gate (Series) Calculation Formula
For an AND gate containing n basic events, the probability of the top event (system fault) P(T) is calculated as follows:
$$ P(T)=P\left(E_1\right) \times P\left(E_2\right) \times \cdots \times P\left(E_n\right)=\prod\limits_{i=1}^n P\left(E_i\right) $$ (1) 2) OR Gate (Parallel) Calculation Formula
For an OR gate containing n basic events, the probability of the top event is calculated as follows:
$$ P(T)=1-\prod\limits_{i=1}^n\left[1-P\left(E_i\right)\right] $$ (2) Using them, the reliability of AUVs can be systematically analyzed, as well as identify key failure modes and weak links, and develop corresponding improvement measures.
Currently, a multitude of advanced FTA techniques are available. The amalgamation of fuzzy set theory and FTA has been adopted to address uncertainties stemming from expert assessments (Lin and Wang, 1997; Yazdi and Zarei, 2018). Dynamic FTA model was proposed to capture the time dependency among failures. AUVs engaged in undersea terrain and resource exploration missions demand a considerable amount of time. Hence, it becomes essential to continually monitor the real-time status of the AUV throughout the mission. Byun et al. (2022) presented a methodology for online health monitoring of AUVs using FTA. The system was divided into four subsystems, each with its fault tree created from performance and reliability data. The comprehensive health status of the system was evaluated by combining the performance, reliability, fault condition, and weight factors of individual components, as informed by the designated fault trees for each subsystem. As reliability technology research advances, there is a growing awareness of the limitations of traditional reliability theory. In 1975, fuzzy set theory was introduced to address the issues of uncertainty in reliability analysis. Bian et al. (2009b) calculated the fuzzy probability of the primary event of concern-the abnormal operation of the AUV. An analysis of the results was performed, which highlighted the utility of this approach in managing uncertainties associated with fuzzy data and in determining the failure thresholds for component events within fault tree analysis. The outcomes provided crucial knowledge for optimizing AUV design, enhancing fault diagnosis procedures, and improving maintenance strategies.
FTA not only represents the structure of a system but also analyzes the relationships among components of failure modes, serving as an effective tool for safety analysis (Peeters et al., 2018; Márquez et al., 2016; Cristea and Constantinescu, 2017). Nevertheless, traditional FTA comes with inherent limitations. In the context of reliability analysis for AUVs, specific requirements and conditions must be observed during the fault tree computation and construction process. For example, accounting for the coupling effects of different factors is critical. Therefore, additional research is warranted to investigate the integration of FTA with AUV reliability analysis to meet these particular needs effectively (Cristea and Constantinescu, 2017).
3.2 Simulated methods for reliability analysis of AUVs
The simulation methodology principally relies on the theoretical foundations of Monte Carlo method and Markov Chains. It utilizes computer-based simulation techniques to perform calculations for the studied system, effectively circumventing the complexities associated with system modeling. This approach reduces the difficulty of assessing system reliability and enhances the efficiency of reliability computation and analysis. Subsequently, numerical simulation techniques such as Monte Carlo simulation, Importance Sampling, and Subset Simulation are utilized to calculate the probability of failure. In the reliability analysis of AUVs, simulated methods offer several advantages over analytical methods. Simulated methods can effectively manage the intricate interactions between AUV subsystems, which may be challenging for analytical methods due to the need for model simplifications (Zhang et al., 2019a). Simulated methods are highly flexible and can adapt to various failure modes and environmental conditions. In addition, simulated methods can integrate extensive historical and empirical data, allowing for more precise predictions of AUV failure probabilities and reliability (Xia et al., 2022). In contrast, analytical methods typically rely on theoretical models and assumptions, which may not fully leverage actual data.
Monte Carlo, also known as the statistical experiment method or stochastic sampling technique, is a probabilistic methodology grounded in the theory of mathematical statistics (Zio et al., 2007; Zhang et al., 2019a; Zio et al., 2006). Monte Carlo simulations enable the use of advanced component models that account for factors such as component aging. However, incorporating these detailed models significantly increases the computational burden. Figure 7 depicts the design process of the Monte Carlo simulation. It is divided into sequential Monte Carlo and non-sequential Monte Carlo methods.
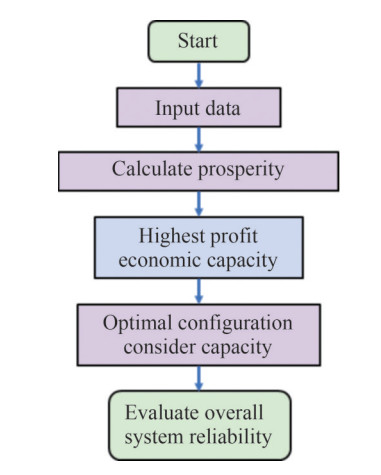 Figure 7 The design process of Monte Carlo Simulation (Gandoman et al., 2019)
Figure 7 The design process of Monte Carlo Simulation (Gandoman et al., 2019)Sequential Monte Carlo is also known as the state duration sampling method. It is primarily based on system repair rates and failure rates. It samples the "operate-fail-operate" lifecycle for each component, aiming to ultimately generate a random sequence of system states. Conversely, Nonsequential Monte Carlo employs a direct sampling method to randomly determine the states of components (Zio, 2013). This method overlooks state transitions and temporal details, offering benefits that include minimal memory requirements, straightforward procedures, and rapid convergence. In the domain of AUVs, the Monte Carlo methods are also widely used. However, for structural reliability problems with low failure probabilities, the Monte Carlo Simulation method requires the generation of a large number of simulation samples to ensure the convergence of estimated values (Joy, 1991). This results in a significant computational burden, leading to inefficient reliability analysis. Bremnes et al. (2020) concentrated on the prediction of loss risk for AUVs during their missions, presenting a solution that utilizes a BBN. This method included the integration of outcomes from expert judgment elicitation to set the initial prior probability of a failure-induced loss. The research showcased the incorporation of a BBN model with a Monte Carlo simulation, generating risk "envelopes" that inform on AUV operational hazards.
Markov chain is a widely applied stochastic model in the field of reliability analysis (Norris, 1998). It concentrates on finite discrete states within a system, with the state transition probability (STP) being dependent only on the present state, independent of past states and historical data.
$$ P\left(X_{n+1}=j \mid X_n=i\right)=P_{i j}(n) $$ (3) Equation (3) represents the one-step transition probability of transitioning from state i to state j at time n. i, j = 1, 2, …, N.
$$ P=\left[\begin{array}{cccc} p_{11} & p_{12} & \cdots & p_{1 N} \\ p_{21} & p_{22} & \cdots & p_{2 N} \\ \cdots & \cdots & \cdots & \cdots \\ p_{N 1} & p_{N 2} & \cdots & p_{N N} \end{array}\right] $$ (4) Equation (4) is called the transition probability matrix.
Markov chains are commonly used to perform the reliability assessment of engineering systems. For the reliability evaluation of complex systems, the Markov chain often performs better compared to other models. The Markov chain is particularly effective for systems where components can be well characterized by mathematical techniques. Figure 8 shows the analysis of the design process of the Markov model.
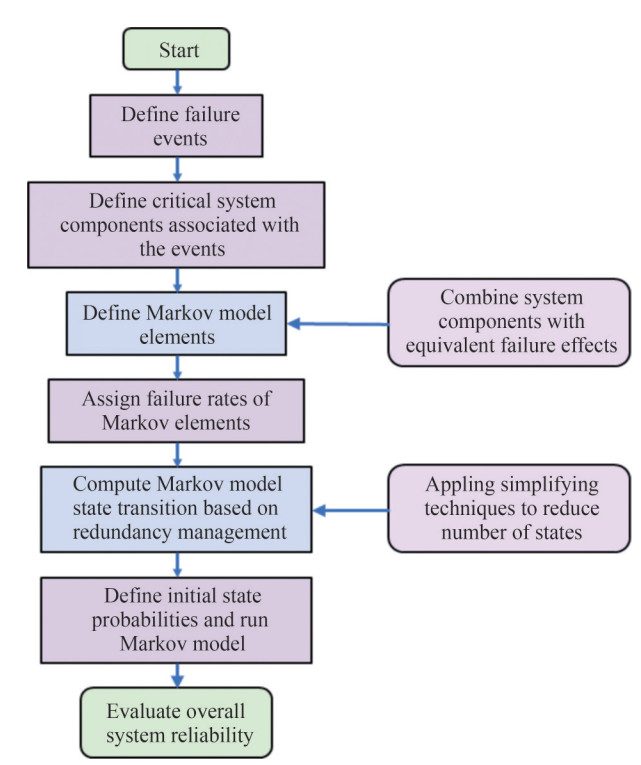 Figure 8 Markov model design process (Gandoman et al., 2019)
Figure 8 Markov model design process (Gandoman et al., 2019)As a result, the Markov chain is suited for predicting the likelihood of future state occurrences (Titman, 2015; Tanimoto and Hagishima, 2005; Li et al., 2019). Utilizing its capability to identify system states and quantify the STP within a sequence of operations, a Markov chain proves to be an optimal approach for conducting reliability analysis in the deployment of AUVs. Brito and Griffiths (2011) presented a state transition approach utilizing a Markov chain, which clearly outlines the stages from pre-launch, through operation, to recovery. This integration of the Markov model with real-time survival statistics allows for the precise calculation of success probabilities for each state and transition. As a result, this approach offers a way to evaluate the probability of achieving the intended mission goals. In the practical deployment of multi-AUV cooperative systems, tasks or malfunctions may change the system's configuration. Such dynamic changes in the topology can greatly affect the reliability of the multi-AUV cooperative system. An investigation was carried out on the interactive Markov chains model, which served as an intermediary model for operational activity and capability assessment, designed to represent the reliability of multiAUV cooperative systems facing topological changes (Liang et al., 2017). The study utilized the concept of "Action" to define the model. The phrase "action transfer" is used to depict the dynamics of a multi-AUV cooperative system with a variable topology. Subsequently, modelchecking techniques were employed to analyze the interactive Markov chains, offering a quantification of the system's reliability probability within a given period.
In recent years, advancements such as big data integration, and digital twin technology have further enhanced the effectiveness of simulated methods in this field (Liu et al., 2021b). Simulated methods can integrate extensive historical and empirical data, allowing for more precise predictions of AUV failure probabilities and reliability. Xia et al. (2022) proposed a hierarchical attention based multi-source data fusion method for the fault diagnosis of AUV. The method is validated on the monitoring data of Qianlong-2 AUV obtained during the sea trial in the South China Sea. Digital twin technology represents a cutting-edge simulation approach creating a digital replica of the AUV that allows real-time monitoring and analysis of its operational state. This facilitates early fault detection and preventive maintenance.
3.3 Surrogate model methods for reliability analysis of AUVs
In recent years, surrogate models have become widely used in the study of reliability theory and methods. The surrogate model, favored by many scholars for its high efficiency and simplicity in replacing complex computational models, significantly reduces computational costs. In terms of reliability analysis, some scholars have also innovated the use of surrogate models and applied them to various fields (Meng et al., 2023; Zhang et al., 2012). The central idea is to construct an approximate model, using classification or regression techniques, that estimates the limit state function (Zhang et al., 2015; Golzari et al., 2015).
The reliability analysis methods based on surrogate models have seen significant application in AUVs in recent years. Surrogate models have been used to predict the hydrodynamic performance of AUVs under various operational conditions, allowing for better design and control strategies (Liu et al., 2021a; Liu and Li, 2022). In addition, surrogate models help in fault detection and diagnosis by modeling the normal behavior of AUV systems and identifying deviations (Wei et al., 2019).
In the domain of reliability engineering, prevalent surrogate modeling techniques encompass Response Surface Methodology (RSM), Support Vector Machines (SVM), Artificial Neural Networks (ANN), and Kriging methods (Meng et al., 2024), and others. The fundamental principle of these models is to replace the actual functional relationships with approximated input-output correlations derived from a limited dataset, thereby facilitating predictions for a vast number of samples within the variable space. With the rapid development and application of machine learning across various domains, it has also demonstrated significant advantages in the field of reliability (Toplak et al., 2014; Jordan and Mitchell, 2015). Table 8 shows the characters of the following reliability analysis methods.
Table 8 Characters of the following reliability analysis methodsReliability analysis method Advantage Limitation Reference RSM • It helps in optimizing processes efficiently by identifying the optimal settings of input variables that lead to desired output responses. • It assumes that the relationships between input variables and responses are linear, which may not hold true for all systems. Rashki et al. (2019);
Solanki et al. (2020);
Gan and Wang (2020)• It reduces the number of experiments required compared to traditional experimental designs by using statistical models to predict responses. • It is most effective for studying small regions around the design space where linearity assumptions hold, and extrapolation to larger regions may lead to inaccuracies. • It provides insights into the relationships between input variables and responses, helping in understanding the underlying process behavior. • RSM results can be sensitive to outliers or extreme data points, affecting the accuracy of the models. SVM • It has the ability to handle high-dimensional data effectively, especially when the number of features is much greater than the number of samples. • SVMs can be computationally intensive, particularly with large datasets. Roy and Chakraborty (2023); Afshari et al. (2022) • SVMs are also versatile and can be used for both classification and regression tasks. They work well with small to medium-sized datasets and have a strong theoretical foundation in statistical learning theory. • SVMs are sensitive to the choice of the kernel function and its parameters, which can affect the model's performance. ANN • ANNs can automatically learn relevant features from the data, reducing the need for manual feature engineering. • ANNs require a large amount of labeled data for training, and they may not perform well with small or noisy datasets. Wei et al. (2019) • ANNs can scale to handle large datasets with a large number of features and samples, making them applicable to a wide range of problems. • ANNs can be prone to overfitting, especially when the model is too complex or when training data is limited. Kriging model • Kriging can adapt to different types of data distributions and spatial structures, showing a degree of flexibility. • When dealing with large-scale or highdimensional data, the Kriging model can become complex, requiring more computational resources and time. Meng et al. (2023)
Meng et al. (2024)
Shi et al. (2020)• Kriging can produce relatively accurate predictions even with a limited number of data points. • Kriging requires high-quality data, including accurate measurement values and an adequate number of data points. RSM is a method used to characterize the input-output relationships in structural reliability problems through function approximation. Two important models are commonly used in RSM. These are special cases of a model and include the first-degree model (d = 1),
$$ y=\boldsymbol{\beta}_0+\sum\limits_{i=1}^k \boldsymbol{\beta}_i x_i+\varepsilon $$ (5) and the second-degree model (d = 2)
$$ y=\boldsymbol{\beta}_0+\sum\limits_{i=1}^k \boldsymbol{\beta}_i x_i+\sum \sum\limits_{i <j} \boldsymbol{\beta}_{i j} x_i x_j+\sum\limits_{i=1}^k \boldsymbol{\beta}_{i i} x_i^2+\varepsilon $$ (6) where $x=\left(x_1, x_2, \cdots, x_k\right), \boldsymbol{\beta} $ is a vector of unknown constant coefficients referred to as parameters and ε is a random experimental error assumed to have a zero mean.
This involves representing relationships between input parameters, such as material properties, applied loads, and operating conditions, and output parameters, such as stress and displacement. It is considered one of the earliest surrogate models applied to structural reliability analysis (Rashki et al., 2019; Solanki et al., 2020; Gan and Wang, 2020). Liu et al. (2021a) examined the strength and stability of a carbon fiber composite cylindrical hull, which was reinforced with ribs, intended for use in an AUV. The analysis was conducted using finite element analysis (FEA) in conjunction with the RSM. A sensitivity analysis of the parameters was conducted, followed by optimization through the RSM, employing both screening techniques and a Multiobjective Genetic Algorithm (MOGA). Testing and engineering applications have validated the robustness of this approach. The RSM utilizes low-order polynomials to cre ate an approximation of the true limit state function. This approach is well-suited for scenarios where the limit state function's nonlinearity is mild (Khairul and Mohamed, 2015). However, when the nonlinearity is high, increasing the polynomial degree can lead to a sharp increase in computational complexity, and the results obtained may become unstable.
SVM is a powerful machine learning technique relying on the structural risk minimization principle. The SVM primarily describes classification with support vector methods.
The formula for the basic type of SVM is shown as formula (7):
$$ \begin{array}{ll} \min & \frac{1}{2}\|\boldsymbol{w}\|^2 \\ \text { s.t. } & y_i\left(\boldsymbol{w}^{\mathrm{T}} \boldsymbol{x}_i+b\right) \geqslant 1, i=1, 2, \cdots, m \end{array} $$ (7) w is the weight vector, xi is the feature vector, yi is the label of the i-th sample, b is the threshold, m is the number of samples, and "s.t." stands for "subject to", indicating a series of inequalities or equalities that must be satisfied to solve the optimization problem.
Apart from linear classification, the SVM approach can also be applied to nonlinear classification by utilizing kernel tricks, which implicitly map the inputs into high dimensional feature spaces. In comparison to RSM, SVM is more suitable for handling highly nonlinear problems (Roy and Chakraborty, 2023; Afshari et al., 2022). Nevertheless, SVM encounters two challenges: the choice of the kernel function and the tuning of model parameters. These factors greatly influence the precision of the resulting surrogate model. Therefore, the optimal selection of the kernel function and meticulous configuration of the model parameters are essential to ensure the creation of a high-precision surrogate model.
The ANN method demonstrates notable advantages in handling stochastic, fuzzy, and nonlinear data. It is particularly effective for complex shapes, high-dimensional variables, and implicit issues inherent in the limit state functions pertinent to structural reliability. Li et al. (2021a) focused on the lightweight optimum design of head pressure shell of an AUV with reliability requirements. The optimization model is addressed using a Genetic Algorithm (GA) with a surrogate model based on Backpropagation (BP) neural network. The BP neural network is further improved for enhanced accuracy through Particle Swarm Optimization (PSO). It is noteworthy that ANN has found widespread application in the field of AUV fault diagnosis (Wei et al., 2019), giving rise to various precise and efficient variant models. These applications make ANN a powerful tool in the domain of AUV fault diagnosis, contributing to the enhancement of system reliability, safety, and performance.
The Kriging model is characterized by its ability to provide estimates with low variance, unbiasedness, and a combination of global approximation in the variable space with consideration for local random errors (Sun et al., 2017; Shi et al., 2020). It is suitable for structural reliability problems characterized by high nonlinearity and localized response variations. The lightweight design of AUV is a way to improve its resistance. To fulfill the reliability criteria for AUVs, Liu and Li (2022) conducted the lightweight optimization design of the Aft Pressure Shell (APS) using a sandwich structure. A mathematical model for multi-objective optimization is formulated, considering mass and maximum stress as objectives and strength as a constraint. The optimization process is efficiently executed using NSGA-II with a Kriging surrogate model. The provided analysis established a foundation for understanding the lightweight characteristics of the pressure shell, offering valuable references and technical support. Although the Kriging model is an effective surrogate modeling method for reliability analysis, its computational intensity may present difficulties when dealing with large datasets or intricate models. Kriging models are generally effective within the range of the input data. Venturing outside of this specified range can result in unreliable outcomes, and the model may produce inaccurate predictions (Kleijnen, 2009; Zhang et al., 2015). Hence, when evaluating the application of the Kriging model, it is important to weigh these limitations against the unique needs and features of the problem at hand. It may also be prudent to explore other surrogate models or machine learning methods as alternatives when the situation warrants.
Some researchers have also been dedicated to innovations in surrogate models. Future research directions for surrogate models include integration with machine learning, real-time reliability monitoring, and automated generation and optimization of surrogate models (Alizadeh et al., 2020). Integrating surrogate models with machine learning techniques can enhance prediction accuracy and adaptability by combining deep learning and reinforcement learning methods to improve the dynamic response capabilities of surrogate models. Enhancing real-time monitoring and decision-making capabilities of surrogate models involves creating adaptive models that can handle streaming AUV data, and providing immediate reliability assessments and fault predictions to ensure timely detection and handling of anomalies during operation (Hammond, 2023). Furthermore, researching methods for automated generation and optimization of surrogate models using evolutionary algorithms and meta-learning reduces human intervention and enhances model efficiency, enabling surrogate models to adapt to different tasks and environmental requirements (Luo et al., 2021; Jia et al., 2020). By focusing on these research directions and innovations, the application of surrogate models will become more widespread and efficient, providing strong support for improving the reliability and performance of AUVs.
4 Current challenges and hotspots for reliability analysis of AUVs
The following steps were employed to identify current research challenges and hotspots. A literature search using specific keywords related to AUV reliability analysis in relevant databases was performed. 150 papers for further analysis finally remained after screening. A literature count analysis was conducted based on the remaining 150 papers, which revealed a gradual increase in the number of publications over time. Additionally, there has been a growing number of studies focusing on the impact of human factors on equipment reliability. After excluding non-specific keywords such as "literature" and "review" a statistical analysis of the remaining keywords in papers was conducted. The high-frequency keyword analysis revealed that terms such as "Autonomous Underwater Vehicles", "safety", "human errors", "reliability", "risk failure", and "artificial intelligence" ranked among the top. After conducting a statistical analysis of the most frequently occurring words in the abstracts and titles of the papers, the main research themes were identified. Further content analysis revealed that although current papers mainly focus on the impact of technical factors on AUV reliability, research on human factors is on the rise. With the development of AUV technologies, topics of reliability research are broadening to intelligent scope. Additionally, experts whose primary research focuses include underwater vehicles, deep-sea submersible safety and reliability, intelligent maintenance of underwater equipment, and artificial intelligence were invited to provide insights and recommendations for the research and development in the field of AUV reliability. Based on the above analysis, we found that the primary challenge in AUV reliability analysis is conducting reliability analysis with limited data. Intelligent reliability analysis and human reliability analysis are the main research hotspots in AUV reliability analysis.
4.1 Limited data reliability analysis of AUVs
In comparison to UAVs and automobiles, the production and associated expenses of AUVs are typically higher, and their global numbers are comparatively limited. The limited operational duration and mission cycles inherent to AUVs restrict the volume of data that can be collected, posing a challenge to the creation of large scale datasets. Furthermore, the unique operational environment of AUVs means that the data collected is often affected by environmental noise and various stochastic disturbances, which reduces the density of valuable information within the data (Yang et al., 2023b; Chen, 2018a). Consequently, conducting reliability analysis based on sufficient data becomes a challenge. Given these circumstances, conducting reliability analysis for AUVs with limited data availability may emerge as a primary area of research interest. For thorough reliability analysis of AUVs, a robust base of foundational failure data is crucial. This data encompasses detailed records of system and component failures within AUVs, specifying the nature of each failure, the timing of its occurrence, its duration, and other pertinent specifics. The historical data includes records of AUV performance faults, serving as the essential data needed for various established reliability analysis methods such as FTA, Event Tree Analysis (ETA), and Bayesian Networks (Aslansefat et al., 2014; Loh et al., 2019). This historical information is utilized to construct reliability models, determine failure rates, and conduct failure mode analysis, among other critical reliability assessment processes. However, despite the advancements and years of development and application of AUVs, the availability of comprehensive fault data remains limited, which leads to the challenge of accurate reliability estimation.
For conducting reliability analysis of AUVs with limited data, various statistical and probabilistic methods including FMEA, RBD (Reliability Block Diagram) and RGA (Reliability Growth Analysis) can be employed to assess and predict system reliability. A number of researches adopted expert knowledge to address the concern of limited historical data (Loh et al., 2020a). Expert judgments offer qualitative reasoning and insights that stem from their specialized knowledge, practical experience, and domain expertise. This approach enables experts to impart their informed opinions and insights to bridge data gaps or furnish assessments in situations where empirical data might be sparse or unavailable. Nevertheless, relying on expert judgments may introduce the inherent biases of experts, potentially resulting in judgmental uncertainties. This highlights the need to adopt more advanced methodologies to mitigate such issues, particularly when dealing with the challenges of data scarcity in future research.
In recent years, advancements in computer science have facilitated the widespread adoption of machine learning methods in different domains (Rachman and Ratnayake, 2019). Machine learning pervades an increasing number of fields. Its impact is profound, and it will continue to upend traditional academic disciplines and industries (Xu and Saleh, 2021; Afshari et al., 2022).
In the field of AUVs, machine learning techniques are utilized for tasks such as processing AUV sensor data, conducting target recognition and tracking, path planning and control. The method has the potential to tackle data limitation problems. Some researchers have combined machine learning technology with expert knowledge, which can solve the uncertainty caused by the subjective evaluation of experts. Therefore, the utilization of machine learning based methods in future research can serve as effective tools to reduce reliance on historical data and expert judgments (Rachman and Ratnayake, 2019).
Machine learning algorithms, especially deep learning techniques such as recurrent neural networks (RNNs) and convolutional neural networks (CNNs) can achieve realtime monitoring and prediction of AUVs (Xu and Saleh, 2021). This capability significantly enhances the timeliness and accuracy of fault detection, thereby reducing potential losses and maintenance costs (Rachman and Ratnayake, 2019). In addition, these algorithms continuously adapt to changing environments and operational conditions within the AUV domain, such as varying water depths, temperature changes, or diverse mission objectives. By integrating diverse data sources including sensor data, environmental data, and operational logs, machine learning models enhance the accuracy of reliability analysis in AUVs. They can identify patterns indicative of potential faults or anomalies, thereby improving overall system reliability and performance.
However, machine learning also has its limitations. The performance of machine learning models is highly dependent on the quality and quantity of training data. For certain rare failure modes, the predictive capability of the model is limited if there is insufficient historical data for training (Mahesh, 2020). Additionally, these models often require substantial computational resources and time for training and inference, especially in the case of complex machine learning models (Sarker, 2021). Furthermore, in scenarios with insufficient data or uneven data distribution, there is a risk of model overfitting, which results in inadequate generalization ability in real-world applications.
To address the limitations of machine learning in the reliability analysis of AUVs, several strategies can be employed. Historical data covering different failure modes by expanding AUV operational environments and missions should be collected. Few-shot learning methods (such as meta-learning and reinforcement learning) might be implemented to train models effectively with limited data (Teixeira et al., 2021). Model compression techniques could be employed to reduce the computational complexity and storage requirements, which makes models more suitable for resource-constrained AUV platforms.
These recommendations can be adapted to address the limited data reliability analysis of AUV. 1) Exploring the use of synthetic data generation and transfer learning to improve the robustness of reliability models. 2) Implementing advanced data fusion and augmentation techniques to overcome the limitations of sparse and heterogeneous data. 3) Utilizing real sea trials with AUVs to expand the dataset.
4.2 AI-based reliability analysis of AUVs
Focusing on safety, reliability analysis aims at quantifying the probability of failure of the system and its protective barriers. These barriers are intended to protect the system from failures of any of its components, hardware, software, humans, and organization (Zio, 2009). Traditional reliability analysis commonly utilizes statistical and probabilistic methods to evaluate the ability of systems or components operating without failure for a specific period. AI-based reliability analysis leverages AI methods and a wealth of data to provide a more accurate and dynamic evaluation and prediction of the reliability of AUVs.
Commonly, the methods used for reliability analysis of major equipment grapple with challenges arising from structural complexity and the subtlety of weak signal impacts, which can lead to issues associated with reduced precision and accuracy. The emerging generation of artificial intelligence technologies demonstrates notable advantages in feature extraction, knowledge learning, and intelligent capabilities (Chen, 2018a; Yang et al., 2022a). This presents a novel avenue for AI-based reliability analysis. The intelligent behavior in an AUV system refers to the ability of the system to perceive, reason, and make informed decisions autonomously with minimal human intervention. The advancement of AUV has expanded the scope of reliability analysis for AUV operations to encompass intelligent approaches (Yang et al., 2022a; Edwards et al., 2021).
The majority of traditional reliability analysis methods utilized in the AUV domain involve conducting offline assessments before a mission. For example, previous research in the field of AUVs has developed various reliability models, employing probabilistic methods such as FTA, ETA, and bow tie analysis. These methods offer quantitative estimations of the reliability level of AUV operations. Classic studies heavily rely on historical reliability data and expert judgment, primarily focusing on technical component failures and the subsequent cascade of subsystem failures that ultimately lead to the failure of the entire AUV system. Conducting traditional offline reliability analysis, which heavily depends on human input, tends to be a time-consuming process. Although there have been considerable advancements in reliability analysis models, they remain limited in their ability to precisely model composite functions that incorporate various sublayers and subsidiary functions. To improve the modeling of these composite functions, the adoption of AI-based reliability analysis methods has been suggested (Edwards et al., 2021; Yang et al., 2023a).
Similar to traditional reliability analysis, the goal of AI-based reliability analysis is to enhance system safety and reliability and reduce the occurrence of failures. Traditional reliability analysis relies on Fault Trees, Markov chains, Failure Modes and Effects Analysis, Monte carlo sampling and other mathematical and statistical models (Yazdi and Zarei, 2018; Zhu et al., 2022b). These models lack the capability for proactive fault prediction and prevention, have weak responses to unknown faults, and typically result in analysis outcomes that lag behind real-time conditions, making real-time monitoring and prediction difficult (Bremnes et al., 2019). In traditional reliability analysis, probabilistic theory and fuzzy set theory are commonly used to address uncertainty issues. However, due to the lack of extensive statistical observation data in practical engineering, it is often challenging to determine the parameter distributions and membership functions for traditional reliability analysis models. This difficulty leads to uncertainties in component lifetime distribution models and model parameters, subsequently affecting the accuracy and reliability of the analysis results (Li et al., 2021b). Additionally, some traditional reliability analysis models, such as the Monte Carlo simulation, can impose a significant computational burden, especially for large-scale and complex models (Friederich and Lazarova-Molnar, 2024; Gardoni, 2017).
AI-based reliability analysis harness big data analytics to analyze vast amounts of sensor data, maintenance records, and historical failure data, which can reveal hidden patterns and correlations, leading to more precise reliability analysis and proactive decision-making (Friederich and Lazarova-Molnar, 2024; Tamascelli et al., 2024). AI-based reliability analysis capturing the evolving nature of systems can provide a more realistic representation of system behavior, considering factors such as degradation, aging, maintenance actions, and environmental conditions (Teng et al., 2022; Mubarok et al., 2018). AI-based reliability analysis models enable systems to self-diagnose and provide users with a deeper understanding of the connections between system status and performance. This facilitates real-time production control and supports decision-making (Friederich et al., 2021). Through self-learning capabilities, AI-based reliability analysis can recognize and adapt to new failure modes, enhancing the system's ability to respond to unknown faults. Its strong environmental adaptability allows it to handle dynamic behavior and various interactions within complex systems, providing a more detailed and comprehensive reliability analysis (Trinchero et al., 2019; Sharma et al., 2021; Yang et al., 2022b).
AI-based reliability analysis has the potential to revolutionize the future trends of reliability analysis for AUVs. One potential solution to enhance reliability analysis for AUVs is to combine traditional reliability analysis models with machine learning techniques and integrate them into the online decision system (Bremnes et al., 2019). This approach leverages the strengths of both approaches, using the established knowledge and reliability data from classic reliability analysis models while also benefiting from the adaptability and predictive capabilities of machine learning algorithms.
These recommendations can be adapted to address AI-based reliability analysis of AUV. 1) Using AI or ML algorithms to enhance predictive maintenance and fault diagnosis systems for AUVs. 2) Developing AI or ML algorithms capable of analyzing real-time sensor data to predict potential failures before they occur. 3) Using the digital twins in conjunction with reliability modeling techniques to develop predictive algorithms for real-time reliability analysis of AUV.
4.3 Human reliability analysis of AUVs
As one of the main research directions in the interdisciplinary field of human factors engineering, human factors safety in complex systems has been receiving increasing attention from the academic community (Mkrtchyan et al., 2015). Despite the advancements in science and technology, ensuring the reliability of complex industrial systems, such as nuclear power, aviation, and aerospace, remains a critical concern. Statistically, human error is found to be responsible for a significant portion, ranging from 50% to 90%, of safety accidents in complex systems. To tackle this problem, it is essential to continuously and meticulously evaluate the probability of human error (HEP) to determine its potential impact on system failures (Zhang et al., 2019b).
Human reliability analysis (HRA) has been employed and evolved as a primary proactive strategy to address the challenge in the field of reliability analysis (Patriarca et al., 2020). It focuses on identifying task and operational vulnerabilities, understanding error cycles and influencing factors, quantifying potential mistakes, and ultimately providing guidance for enhancing system reliability and safety. Additionally, HRA contributes to the improvement of humancentered and error-tolerant designs, making socio-technical systems inherently suitable for human operation. Despite the benefits of conducting HRA studies, the successful advancement of other areas within process safety systems necessitates integrating HRA into them, such as risk analysis, and accident investigation.
Human factors are essential in ensuring reliability throughout the life cycle of AUVs, encompassing design, construction, normal operations, maintenance, and emergency procedures (Zarei et al., 2021). However, human behavior and decision-making are widely recognized as major contributors to abnormal situations and accident causation. From both individual and organizational perspectives, human error-whether direct or indirect-has been identified as the most significant, complex, and underlying factor that substantially contributes to the initiation of accidents.
Consequently, there is an increasing emphasis on human factors within the AUV reliability analysis process. Griffiths et al. (2003) observed the case of the Autosub-3 AUV during its four-year missions from 1996 to 2000. As Figure 9 shows, the study concluded that human errors were the primary cause of failures rather than technical malfunctions. Existing reliability analysis research have traditionally prioritized technical aspects while overlooking the significant role of organizational and human factors.
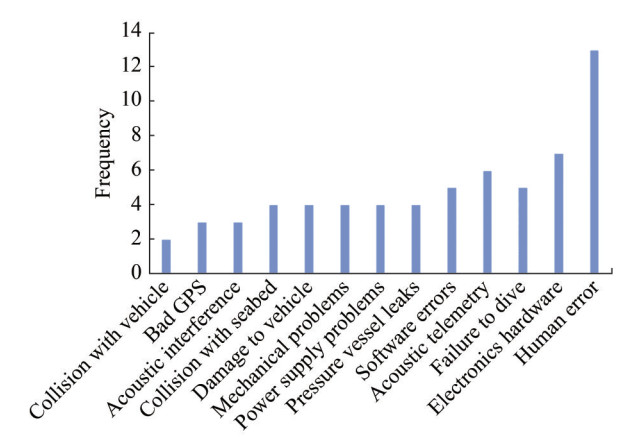 Figure 9 Failure modes and their frequency during missions 1-240 of the Auto sub3 AUV from 1996 to 2000 (Griffiths et al., 2003)
Figure 9 Failure modes and their frequency during missions 1-240 of the Auto sub3 AUV from 1996 to 2000 (Griffiths et al., 2003)In recent years, there has been a growing recognition among researchers regarding the significance of human reliability and risk analysis in the field of AUVs. Loh et al. (2020a) presented a systems-based risk analysis framework facilitated by system dynamics methodology that was applied to an ongoing AUV program to analyze incidents of human error during Antarctic deployment. The simulations conducted using the resulting risk model demonstrated a decrease in the incident rate of human errors as the AUV team's experience increased. In a related study (Thieme et al., 2015), a risk management framework (RMF) for UUV was proposed. This framework highlights the significance of considering the influence of human and organizational factors on risk.
In current human factors reliability analysis, several methods have been proposed to quantify the impact of human factors on the reliability of AUVs. Common techniques include 1) Cognitive Theory of Control: These models analyze mental workload, decision-making, planning, and situational awareness by studying human cognitive processes such as perception, understanding, and reasoning tasks to quantify the impact of human factors (Zarei et al., 2021). 2) Probabilistic Risk Assessment (PRA): PRA is a systematic process of examining how engineered systems work to ensure safety. PRA methods use probabilistic models to assess and quantify the impact of human factors on system failures (Hu et al., 2022; Parhizkar et al., 2021). Key techniques include ETA and FTA, which identify and quantify different failure modes and their causes. 3) DataDriven Methods: Utilizing machine learning and big data analytics, these methods identify and quantify human error patterns from historical operational data, predict potential errors, and provide real-time monitoring and fault diagnosis (Fan et al., 2020; Fan and Yang, 2023).
The impact of human factors on the reliability of AUVs is evident in various aspects, including operational errors and insufficient maintenance (Thieme et al., 2015). The reliability of AUVs demonstrates a positive correlation with the experience of operators and the quality of repair and maintenance. Hence, ensuring operators receive comprehensive training and practical experience to familiarize them with AUV operations and controls, along with implementing regular maintenance schedules for timely and planned maintenance activities, are effective methods to enhance AUV reliability.
These recommendations can be adapted to address the human reliability analysis of AUV. 1) Investigating the impact of operator training, workload, and decision-making processes on AUV reliability. 2) Developing more sophisticated HRA models that incorporate cognitive and behavioral factors specific to AUV operations.
5 Conclusions
This article provides a relatively comprehensive review of reliability analysis studies for AUVs, which includes the failure modes and effects of AUVs, as well as the current primary reliability analysis methods for AUVs. Furthermore, this article also proposed current research challenges and hotspots in the field of AUV reliability analysis.
This article divides the AUV into six subsystems, providing a detailed analysis of the failure modes and causes of the main components within each subsystem, which can provide a reference for the original component optimal design and maintenance processes of AUVs, and formulate corresponding failure prevention and maintenance strategies. Through timely maintenance and inspection, potential failure can be eliminated, playing a crucial role in enhancing the reliability of AUVs. This article provides an overview of the current approaches employed in conducting reliability analysis of AUVs. This aim is to facilitate researchers in enhancing their comprehension of this historical progression of AUV reliability analysis methodologies. This article proposes some current research challenges and hotspots. Constrained by the relatively recent adoption of AUVs in practical applications and their operation under specific conditions, relevant reliability data is relatively scarce, posing a challenge of insufficient data for research. Consequently, an important research direction is exploring how to conduct accurate and efficient reliability analysis with limited data. AI-based reliability analysis has the potential to revolutionize the future trends of reliability analysis for AUVs. One of the current research hotspots is the development of data-driven AI-based reliability analysis techniques. These techniques are aimed at harnessing available sample data to develop surrogate models that are well-suited for complex AUV systems.
Besides, emerging trends, technologies, or methodologies may impact the reliability analysis of AUVs in the future. Developing multi-sensor information fusion technology integrated with advanced technologies such as artificial intelligence, edge computing, blockchain, and cloud computing will facilitate the handling of large volumes of heterogeneous and dynamic data generated by various sensors in AUV systems. This integration will enhance the accuracy and robustness of AUV reliability analysis by enabling more comprehensive data processing and realtime decision-making. The structure of AUV provides a safe and reliable working environment for its subsystems. As ocean exploration delves deeper, the future trends in AUV development will focus on the design and manufacturing of new composite materials (such as glass fiber composites, and ceramic matrix composites), as well as the research and application of novel structural concepts for AUVs. These advancements will drive the development of pressure-resistant structures and materials for AUVs. Developing high-energy-density power systems with highpressure and corrosion resistance, as well as small-scale underwater nuclear power and wireless charging technologies, are gradually becoming key emerging trends for the future. In terms of battery pack design, advancing methods that integrate load-bearing, heat dissipation, and power supply within a single power module is crucial for enhancing the range and safety of AUVs. Additionally, hybrid energy technologies based on fuel cells and lithium-ion batteries, along with power generation technologies utilizing environmental energy sources such as solar and ocean thermal energy, are emerging as new research trends. These advancements can effectively improve the endurance of AUVs, providing robust technical support for deep-sea exploration and underwater operations.
The article falls short of providing an in-depth discussion of the factors that affect AUV reliability. Additionally, while it does address the failure modes and effects of AUVs, the analysis is mainly centered on the primary components, overlooking the complex interplay and interdependencies between different failure modes and their underlying causes. Given the scant volume of published literature on AUV reliability analysis, coupled with this review's strict criteria for selecting articles solely dedicated to AUV risks and reliability, there arises a potential concern regarding the adequacy of the sample size. In future research, we should conduct a systematic investigation of a wider array of factors affecting AUV reliability and create databases that catalog reliability-related research, failure incidents, and maintenance records of AUVs.
Nomenclature UUVs Unmanned Underwater Vehicles AUVs Autonomous Underwater Vehicles ROV Remotely Operated Vehicle INS Inertial Navigation System DVL Doppler Velocity Log GPS Global Positioning System FIR Finite Impulse Response PCA Principal Component Analysis FD Fault Diagnosis RMF Risk Management Framework FTA Fault Tree Analysis UGF Universal Generating Function MVFOSM Mean Value First-order Second Moment BBN Bayesian Belief Network STP State Transition Probability FEA Finite Element Analysis RSM Response Surface Methodology SVM Support Vector Machines ANN Artificial Neural Networks GA Genetic Algorithm BP Backpropagation PSO Particle Swarm Optimization APS Aft Pressure Shell FMEA Failure Mode and Effects Analysis ML Machine Learning AI Artificial Intelligence Competing interest The authors have no competing interests to declare that are relevant to the content of this article. -
Figure 1 Typical working environments of an AUV
Figure 2 Historical accidents of underwater vehicle loss
Figure 3 The concrete logic of reliability analysis of the AUV
Figure 4 The mission profile of the AUV
Figure 5 The structural diagram of the AUV
Figure 6 Failure modes and their frequency during 63 abort incidents from 205 glider missions (Brito et al., 2014)
Figure 7 The design process of Monte Carlo Simulation (Gandoman et al., 2019)
Figure 8 Markov model design process (Gandoman et al., 2019)
Figure 9 Failure modes and their frequency during missions 1-240 of the Auto sub3 AUV from 1996 to 2000 (Griffiths et al., 2003)
Table 1 The typical failure modes and causes of thruster
Failure modes Failure effects Failure causes Thruster jamming (Insulated gate bipolar transistor, IGBT) broken Fishing net entanglement, collision Thrust derating Thrust reduction Collision, gear box wear Thruster blades and parts lost Thruster lose ability Design flaw, strong collision, aging of connector Table 2 The typical failure modes and causes of navigation subsystem
Failure modes Failure effects Failure causes Gyroscope or accelerometer failure Increasing navigation errors, mission fail Collision, human installed error, environmental interference DVL antenna and sensor failure Increasing navigation error, deviating from the planned path Electromagnetic interference, design flaw Depth gauge's pressure sensor damage Affecting the accurate acquisition of information Environmental interference, collision, design flaw Altitude sonar's abnormal signal transmission or reception Low accuracy in measurement results Calibration error, harsh environment, sensor damage GPS can't receive satellite signals, antenna failure Inaccurate positioning, signal loss Ice adhesion, hardware aging, design flaw Table 3 The typical failure modes and causes of communication subsystem
Failure modes Failure effects Failure causes Underwater acoustic modem can't receive or transmit signals AUV signal loss, mission fail Collision, human installed error, environmental interference Radio transceiver module can't receive or transmit signals Loss of Communication ability Electromagnetic interference, design flaw, collision Table 4 The typical failure modes and causes of battery
Failure modes Failure effects Failure causes The negative electrode of the battery forms lithium dendrites Dendrite penetration through the separator causing an internal short circuit Instability in the composition of the electrolyte, battery polarization, design flaw improper operation Copper particles or dendrites form on the battery's negative electrode Increased internal resistance, reduced power, decreased operating current density Battery Overcharging or over-discharging, uneven current distribution, electrolyte composition issues, material flaws Gas generation and swelling of the battery at the positive electrode Reduced capacity and power Battery overcharging or over-discharging, material flaws Perforation of the battery separator Increased internal resistance, reduced power, decreased operating current density External pressure, assembly errors, internal short circuits Decrease in lithium-ion concentration in the electrolyte Increased internal resistance Internal sealing flaws, material flaws Corrosion of external leads attached to positive and negative terminals Voltage decline Material flaws, electrolyte corrosion Short circuit Voltage decline Material flaws, electrolyte corrosion Table 5 The typical failure modes and causes of environmental detection subsystem
Failure modes Failure effects Failure causes Forward-looking sonar failure AUV is unable to provide timely warnings or take evasive actions Physical damage such as impact or collision, sensor damage, software malfunction Side-scan sonar failure Decreased target detection capability Physical damage such as impact or collision, sensor damage, design flaws Camera pollution or damage Decreased detection capability Physical damage such as impact or collision, aging of connection lines Table 6 The typical failure modes and causes of emergency subsystem
Failure modes Failure effects Failure causes Seal failure, pressure sensor malfunction, and actuator failure in ultra-deep pressure protection device The survival probability of AUV decreases in emergencies Design flaws, human error, seal aging and damage Emergency buoyancy adjustment device failure The survival probability of AUV decreases in emergencies Human error, design flaws, mechanical components damage Pressure leakage in high-pressure gas system The survival probability of AUV decreases in emergencies High-pressure gas cylinder damage, valve failure Table 7 Classification of major reliability analysis methods regarding AUVs
Analytical methods Decision diagram Fault tree analysis Universal generating function State space methods Simulated methods Monte carlo Markov chain Subset simulation Surrogate model methods Response surface methodology Support vector machines Artificial neural networks Kriging Table 8 Characters of the following reliability analysis methods
Reliability analysis method Advantage Limitation Reference RSM • It helps in optimizing processes efficiently by identifying the optimal settings of input variables that lead to desired output responses. • It assumes that the relationships between input variables and responses are linear, which may not hold true for all systems. Rashki et al. (2019);
Solanki et al. (2020);
Gan and Wang (2020)• It reduces the number of experiments required compared to traditional experimental designs by using statistical models to predict responses. • It is most effective for studying small regions around the design space where linearity assumptions hold, and extrapolation to larger regions may lead to inaccuracies. • It provides insights into the relationships between input variables and responses, helping in understanding the underlying process behavior. • RSM results can be sensitive to outliers or extreme data points, affecting the accuracy of the models. SVM • It has the ability to handle high-dimensional data effectively, especially when the number of features is much greater than the number of samples. • SVMs can be computationally intensive, particularly with large datasets. Roy and Chakraborty (2023); Afshari et al. (2022) • SVMs are also versatile and can be used for both classification and regression tasks. They work well with small to medium-sized datasets and have a strong theoretical foundation in statistical learning theory. • SVMs are sensitive to the choice of the kernel function and its parameters, which can affect the model's performance. ANN • ANNs can automatically learn relevant features from the data, reducing the need for manual feature engineering. • ANNs require a large amount of labeled data for training, and they may not perform well with small or noisy datasets. Wei et al. (2019) • ANNs can scale to handle large datasets with a large number of features and samples, making them applicable to a wide range of problems. • ANNs can be prone to overfitting, especially when the model is too complex or when training data is limited. Kriging model • Kriging can adapt to different types of data distributions and spatial structures, showing a degree of flexibility. • When dealing with large-scale or highdimensional data, the Kriging model can become complex, requiring more computational resources and time. Meng et al. (2023)
Meng et al. (2024)
Shi et al. (2020)• Kriging can produce relatively accurate predictions even with a limited number of data points. • Kriging requires high-quality data, including accurate measurement values and an adequate number of data points. Nomenclature UUVs Unmanned Underwater Vehicles AUVs Autonomous Underwater Vehicles ROV Remotely Operated Vehicle INS Inertial Navigation System DVL Doppler Velocity Log GPS Global Positioning System FIR Finite Impulse Response PCA Principal Component Analysis FD Fault Diagnosis RMF Risk Management Framework FTA Fault Tree Analysis UGF Universal Generating Function MVFOSM Mean Value First-order Second Moment BBN Bayesian Belief Network STP State Transition Probability FEA Finite Element Analysis RSM Response Surface Methodology SVM Support Vector Machines ANN Artificial Neural Networks GA Genetic Algorithm BP Backpropagation PSO Particle Swarm Optimization APS Aft Pressure Shell FMEA Failure Mode and Effects Analysis ML Machine Learning AI Artificial Intelligence -
Afshari SS, Enayatollahi F, Xu XY, Liang XH (2022) Machine learning-based methods in structural reliability analysis: a review. Reliability Engineering & System Safety 219: 108223. https://doi.org/10.1016/j.ress.2021.108223 Agbakwuru JA, Nwaoha TC, Udosoh NE (2023) Application of CRITIC-EDAS-based approach in structural health monitoring and maintenance of offshore wind turbine systems. Journal of Marine Science and Application (3): 545–555. https://doi.org/10.1007/s11804-023-00355-5 Alizadeh R, Allen JK, Mistree F (2020) Managing computational complexity using surrogate models: a critical review. Research in Engineering Design 31(3): 275–298. https://doi.org/10.1007/s00163-020-00336-7 Allotta B, Pugi L, Reatti A, Corti F (2017) Wireless power recharge for underwater robotics. Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe, Milan, Italy, 1–6. https://doi.org/10.1109/EEEIC.2017.7977478 Aslansefat K, Latif-Shabgahi GR, Kamarlouei M (2014) A strategy for reliability evaluation and fault diagnosis of autonomous underwater gliding robot based on its fault tree. International Journal of Advances in Science, Engineering and Technology 2: 83–89. Aven T, Nøkland TE (2010) On the use of uncertainty importance measures in reliability and risk analysis. Reliability Engineering & System Safety 95(2): 127–133. https://doi.org/10.1016/j.ress.2009.09.002 Belov D, Yang MH (2008) Failure mechanism of Li-ion battery at overcharge conditions. Journal of Solid State Electrochemistry 12: 885–894. https://doi.org/10.1007/s10008-007-0449-3 Bhatti UI, Ochieng WY (2007) Failure modes and models for integrated GPS/INS systems. The Journal of Navigation 60(2): 327–348. https://doi.org/10.1017/S0373463307004237 Bian XQ, Mu CH, Yan Z, Xu J (2009a) Simulation model and fault tree analysis for AUV. Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China. https://doi.org/10.1109/ICMA.2009.5246716 Bian XQ, Mu CH, Yan Z, Xu J (2009b) Reliability analysis of AUV based on fuzzy fault tree. Proceedings of the 2009 IEEE International Conference on Mechatronics and Automation, Changchun, China. https://doi.org/10.1109/ICMA.2009.5246655 Bowen AD, Yoerger DR, Taylor C, McCabe R, Howland J, Gomez-Ibanez D, Kinsey JC, Heintz M, Mcdonald G, Peters DB, Fletcher B, Young C, Buescher J, Whitcomb LL, Martin SC, Webster SE, Jakuba MV (2008) The Nereus hybrid underwater robotic vehicle for global ocean science operations to 11 000 m depth. Proceedings of the OCEANS 2008, Quebec City, Canada, 1–10. https://doi.org/10.1109/OCEANS.2008.5151993 Bowen AD, Yoerger DR, Taylor C, McCabe R, Howland J, Gomez-Ibanez D, Kinsey JC, Heintz M, Mcdonald G, Peters DB, Bailey J, Bors E, Shank T, Whitcomb LL, Martin SC, Webster SE, Jakuba MV, Fletcher B, Young C, Buescher J, Fryer P, Hulme S (2009) Field trials of the Nereus hybrid underwater robotic vehicle in the challenger deep of the Mariana Trench. Proceedings of the OCEANS 2009, Biloxi, USA, 1–10. https://doi.org/10.23919/OCEANS.2009.5422311 Bremnes JE, Norgren P, Sørensen AJ, Thieme CA, Utne IB (2019) Intelligent risk-based under-ice altitude control for autonomous underwater vehicles. Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 1–8. https://doi.org/10.23919/OCEANS40490.2019.8962532 Bremnes JE, Thieme CA, Sørensen AJ, Utne IB, Norgren P (2020) A Bayesian approach to supervisory risk control of AUVs applied to under-ice operations. Marine Technology Society Journal 54: 16–39. https://doi.org/10.4031/MTSJ.54.4.5 Brito M, Griffiths G (2011) A Markov chain state transition approach to establishing critical phases for AUV reliability. IEEE Journal of Ocean Engineering 36: 139–149. https://doi.org/10.1109/JOE.2010.2083070 Brito M, Griffiths G, Challenor P (2010) Risk Analysis for autonomous underwater vehicle operations in extreme environments. Risk Analysis 30: 1771–1788. https://doi.org/10.1111/j.1539-6924.2010.01476.x Brito M, Griffiths G, Ferguson J, Hopkin D, Mills R, Pederson R, Macneil E (2012) A Behavioral probabilistic risk assessment framework for managing autonomous underwater vehicle deployments. Journal of Atmospheric and Oceanic Technology 29: 1689–1703. https://doi.org/10.1175/JTECH-D-12-00005.1 Brito M, Smeed D, Griffiths G (2014) Underwater glider reliability and implications for survey design. Journal of Atmospheric and Oceanic Technology 31: 2858–2870. https://doi.org/10.1175/JTECH-D-13-00138.1 Byun S, Papaelias M, Márquez FPG, Lee D (2022) Fault tree analysis based health monitoring for autonomous underwater vehicle. Journal of Marine Science and Engineering 10: 1855. https://doi.org/10.3390/jmse10121855 Chen X, Bose N, Brito M, Khan F, Thanyamanta B, Zou T (2021) A review of risk analysis research for the operations of autonomous underwater vehicles. Reliability Engineering & System Safety 216: 108011. https://doi.org/10.1016/j.ress.2021.108011 Chen XF (2018a) Intelligent maintenance and health management. China Machine Press, Beijing, China, 111–134 Chen Z, Xu GH, Wang GX, Liu Y, Zhai YF, Zheng Y (2018b) AUV emergency self-rescue mechanism and strategy. China Journal of Ship Research 13(6): 120–127. https://doi.org/10.19693/j.issn.1673-3185.01027 Choyekh M, Kato N, Dewantara R, Senga H, Chiba H (2016) Depth and altitude control of an AUV using buoyancy control device. Journal of Electrical Engineering 4: 133–149. https://doi.org/10.17265/2328-2223/2016.03.004 Cornell CA (1969) A probability based structural code. Journal Proceedings 66(12): 974–985. https://doi.org/10.14359/7446 Cristea G, Constantinescu DM (2017) A comparative critical study between FMEA and FTA risk analysis methods. IOP Conference Series: Materials Science and Engineering 252(1): 012046. https://doi.org/10.1088/1757-899X/252/1/012046 Donovan GT (2012) Position error correction for an autonomous underwater vehicle inertial navigation system (INS) using a particle filter. IEEE Journal of Oceanic Engineering 37(3): 431–445. https://doi.org/10.1109/JOE.2012.2190810 Edwards C, Stilwell DJ, Krauss S, Miller LM, Brizzolara S (2021). Towards an intelligent energy monitoring system for an AUV using bayes risk. Proceedings of the OCEANS 2021: San Diego–Porto, San Diego, USA, 1–8. https://doi.org/10.23919/OCEANS44145.2021.9705804 Fan SQ, Yang ZL (2023) Towards objective human performance measurement for maritime safety: a new psychophysiological data-driven machine learning method. Reliability Engineering & System Safety 233: 109103. https://doi.org/10.1016/j.ress.2023.109103 Fan SQ, Yang ZL, Blanco-Davis E, Zhang JF, Yan XP (2020) Incorporation of human factors into maritime accident analysis using a data-driven Bayesian network. Reliability Engineering & System Safety 203: 107070. https://doi.org/10.1016/j.ress.2020.107070 Friederich J, Lazarova-Molnar S (2024) Reliability assessment of manufacturing systems: a comprehensive overview, challenges and opportunities. Journal of Manufacturing Systems 72: 38–58. https://doi.org/10.1016/j.jmsy.2023.11.001 Friederich J, Jepsen SC, Lazarova-Molnar S, Worm T (2021) Requirements for data driven reliability modeling and simulation of smart manufacturing systems. Proceedings of the 2021 Winter Simulation Conference, Phoenix, USA, 1–12. https://doi.org/10.1109/WSC52266.2021.9715410 Gan N, Wang Q (2020) Topology optimization design of improved response surface method for time-variant reliability. Advances in Engineering Software 146: 102828. https://doi.org/10.1016/j.advengsoft.2020.102828 Gandoman FH, Ahmadi A, Mavalizadeh H, Mayet C, Omar N, Nezhad AE et al (2019) Status and future perspectives of reliability assessment for electric vehicles. Reliability Engineering & System Safety 183: 1–16. https://doi.org/10.1016/j.ress.2018.11.013 Gao S, Feng C, Zhang X, Yu Z, Yan TH, He B (2023) Unsupervised fault diagnosis framework for underwater thruster system using estimated torques and multi-head convolutional autoencoder. Mechanical Systems and Signal Processing 205: 110814. https://doi.org/10.1016/j.ymssp.2023.110814 Gardoni P (2017) Risk and reliability analysis: theory and applications. In: Gardoni P (Eds.). Risk and reliability analysis. Springer International Publishing, Berlin, Germany German CR, Yoerger DR, Jakuba M, Shank TM, Langmuir CH, Nakamura K (2008) Hydrothermal exploration with the autonomous benthic explorer. Deep Sea Research Part I: Oceanographic Research Papers 55: 203–219. https://doi.org/10.1016/j.dsr.2007.11.004 Golzari A, Sefat MH, Jamshidi S (2015) Development of an adaptive surrogate model for production optimization. Journal of petroleum Science and Engineering 133: 677–688. https://doi.org/10.1016/j.petrol.2015.07.012 Griffiths G, Millard NW, McPhail SD, Stevenson P, Challenor PG (2003) On the reliability of the Autosub autonomous underwater vehicle. Underwater Technology 25: 175–184. https://doi.org/10.3723/175605403783101612 Hammond BM (2023) Real-time autonomy and maneuvering simulation of an unmanned underwater vehicle near a moving submarine using actively sampled gaussian process surrogate models. PhD thesis, Massachusetts Institute of Technology, 20–25. https://hdl.handle.net/1721.1/151812 Hegde J, Utne IB, Schjolberg I, Thorkildsen B (2018) A Bayesian approach to risk modeling of autonomous subsea intervention operations. Reliability Engineering & System Safety 175: 142–159. https://doi.org/10.1016/j.ress.2018.03.019 Hien VN, He VN, Diem PG (2018) A model-driven implementation to realize controllers for autonomous underwater vehicles. Applied Ocean Research 78: 307–319. https://doi.org/10.1016/j.apor.2018.06.020 Hu YW, Parhizkar T, Mosleh A (2022) Guided simulation for dynamic probabilistic risk assessment of complex systems: concept, method, and application. Reliability Engineering & System Safety 217: 108047. https://doi.org/10.1016/j.ress.2021.108047 Jia LY, Alizadeh R, Hao J, Wang GX, Allen JK, Mistree F (2020) A rule-based method for automated surrogate model selection. Advanced Engineering Informatics 45: 101123. https://doi.org/10.1016/j.aei.2020.101123 Jiang Y, He B, Lv PF, Guo J, Wan JH, Feng C, Yu F (2019) Actuator fault diagnosis in autonomous underwater vehicle based on principal component analysis. Proceedings of the 2019 IEEE Underwater Technology, Kaohsiung, Taiwan, China. https://doi.org/10.1109/UT.2019.8734470 Jordan MI, Mitchell TM (2015) Machine learning: trends, perspectives, and prospects. Science 349: 255–260. https://doi.org/10.1126/science.aaa8415 Joy DC (1991) An introduction to monte carlo simulations. Scanning microscopy 5(2): 4. https://digitalcommons.usu.edu/microscopy/vol5/iss2/4 Kaliaperumal M, Dharanendrakumar MS, Prasanna S, Abhishek KV, Chidambaram RK, Adams S, Zaghib K, Reddy MV (2021) Cause and mitigation of lithium-ion battery failure—A review. Materials 14(19): 5676. https://doi.org/10.3390/ma14195676 Kleijnen JPC (2009) Kriging metamodeling in simulation: a review. European journal of operational research 192(3): 707–716. https://doi.org/10.1016/j.ejor.2007.10.013 Khairul AMS, Mohamed AMA (2015) Overview on the response surface methodology (RSM) in extraction processes. Journal of Applied Science & Process Engineering 2(1): 8–17. https://doi.org/10.33736/jaspe.161.2015 Li B, Mao Z Y, Song BW, Chen PY, Wang H, Sundén B, Wang YF (2022a) Enhancement of phase change materials by nanoparticles to improve battery thermal management for autonomous underwater vehicles. International Communications in Heat and Mass Transfer 137: 106301. https://doi.org/10.1016/j.icheatmasstransfer.2022.106301 Li M, Yang QY (2010) Enhanced safety control and self-rescue system applied in AUV. Proceedings of the 2010 International Conference on Intelligent Computation Technology and Automation, Changsha, China, 2: 212–215. https://doi.org/10.1109/ICICTA.2010.745 Li MJ, Hu YL, Lu CY, Li B, Tian WL, Zhang JM, Mao ZY (2022b) Effect of hydrostatic pressure on electrochemical performance of soft package lithium-ion battery for autonomous underwater vehicles. Journal of Energy Storage 54: 105325. https://doi.org/10.1016/j.est.2022.105325 Li MX, Kang JC, Sun LP, Wang Mian (2019) Development of optimal maintenance policies for offshore wind turbine gearboxes based on the non-homogeneous continuous time Markov process. Journal of Marine Science and Application (1): 93–98. https://doi.org/10.1007/s11804-019-00075-9 Li N, Zhang DQ, Liu HT, Li TJ (2021a) Optimal design and strength reliability analysis of pressure shell with grid sandwich structure. Ocean Engineering 223: 108657. https://doi.org/10.1016/j.oceaneng.2021.108657 Li YJ, Liu Z, He ZF, Tu L, Huang HZ (2023a) Fatigue reliability analysis and assessment of offshore wind turbine blade adhesive bonding under the coupling effects of multiple environmental stresses. Reliability Engineering & System Safety 238: 109426. https://doi.org/10.1016/j.ress.2023.109426 Li ZH, Zhang D, Han B, Wan CP (2023b) Risk and reliability analysis for maritime autonomous surface ship: a bibliometric review of literature from 2015 to 2022. Accident Analysis & Prevention 187: 107090. https://doi.org/10.1016/j.aap.2023.107090 Li ZQ, Wang X, Chen YQ, Gu JY (2021b) Research advances and challenges of reliability assessment of complex equipment based on small sample failure data. Aero Weaponry 28(3): 83–90. https://doi.org/10.12132/ISSN.1673-5048.2020.0137 Liang QW, Sun TY, Shi L (2017) Reliability Analysis for mutative topology structure multi-AUV cooperative system based on interactive Markov chains model. Robotica 35(8): 1761–1772. https://doi.org/10.1017/S0263574716000503 Liang X, Dong ZP, Hou YH, Mu XY (2020) Energy saving optimization for spacing configurations of a pair of self propelled AUV based on hull form uncertainty design. Ocean Engineering 218: 108235. https://doi.org/10.1016/j.oceaneng.2020.108235 Lin CT, Wang MJ (1997) Hybrid fault tree analysis using fuzzy sets. Reliability Engineering & System Safety 58: 205–213. https://doi.org/10.1016/S0951-8320(97)00072-0 Liu HT, Li N (2022) Reliability analysis of autonomous underwater vehicle aft pressure shell for optimal design and strength. Ocean Engineering 249: 110906. https://doi.org/10.1016/j.oceaneng.2022.110906 Liu JX, He B, Yan TH, Yu F, Shen Y (2021a) Study on carbon fiber composite hull for AUV based on response surface model and experiments. Ocean Engineering 239: 109850. https://doi.org/10.1016/j.oceaneng.2021.109850 Liu MN, Fang SL, Dong HY, Xu CZ (2021b) Review of digital twin about concepts, technologies, and industrial applications. Journal of Manufacturing Systems 58: Part B 346–361. https://doi.org/10.1016/j.jmsy.2020.06.017 Liu S, Wei L, Wang H (2020) Review on reliability of supercapacitors in energy storage applications. Applied Energy, 278, 115436. https://doi.org/10.1016/j.apenergy.2020.115436 Loh TY, Brito M, Bose N, Xu JJ, Tenekedjiev K (2019) A fuzzy based risk assessment framework for autonomous underwater vehicle under ice missions. Risk Analysis 39: 2744–2765. https://doi.org/10.1111/risa.13376 Loh TY, Brito M, Bose N, Xu JJ, Tenekedjiev K (2020a) Human error in autonomous underwater vehicle deployment: a system dynamics approach. Risk Analysis 40: 1258–1278. https://doi.org/10.1111/risa.13467. Loh TY, Brito M, Bose N, Xu JJ, Tenekedjiev K (2020b) Fuzzy system dynamics risk analysis (FuSDRA) of autonomous underwater vehicle operations in the Antarctic. Risk Analysis 40: 818–841. https://doi.org/10.1111/risa.13429 Luan J (2005) Development of a small sonar altimeter and constant altitude controller for a miniature autonomous underwater vehicle. M. S thesis, Virginia Polytechnic Institute and State University, Virginia, 5–10. http://hdl.handle.net/10919/31265 Luo WL, Guo XM, Dai JW, Rao TC (2021) Hull optimization of an underwater vehicle based on dynamic surrogate model. Ocean Engineering 230: 109050. https://doi.org/10.1016/j.oceaneng.2021.109050 Lyon RE, Walters RN (2016) Energetics of lithium-ion battery failure. Journal of hazardous materials 318: 164–172. https://doi.org/10.1016/j.jhazmat.2016.06.047 Madsen H, Christensen P, Lauridsen K (2000) Securing the operational reliability of an autonomous mini-submarine. Reliability Engineering & System Safety 68: 7–16. https://doi.org/10.1016/S0951-8320(99)00077-0 Mahesh B (2020) Machine learning algorithms-a review. International Journal of Science and Research 9(1): 381–386. https://doi.org/10.21275/ART20203995 Márquez FG, Pérez JP, Marugán AP, Papaelias M (2016) Identification of critical components of wind turbines using FTA over the time. Renewable Energy 87: 869–883. https://doi.org/10.1016/j.renene.2015.09.038 Melchers RE, Beck AT (2018) Structural reliability analysis and prediction. John Wiley & Sons Press, New York, the USA Meng DB, Yang SY, Zhu SP, Jesus AM (2023) A novel Kriging-model-assisted reliability-based multidisciplinary design optimization strategy and its application in the offshore wind turbine tower. Renewable Energy 203: 407–420. https://doi.org/10.1016/j.renene.2022.12.062 Meng DB, Yang HF, Yang SY, Zhang YT, Jesus AM, Correia J, Ferradosa T, Macek W, Branco R, Zhu SP (2024) Kriging-assisted hybrid reliability design and optimization of offshore wind turbine support structure based on a portfolio allocation strategy. Ocean Engineering 295: 116842. https://doi.org/10.1016/j.oceaneng.2024.116842 Mkrtchyan L, Podofillini L, Dang VN (2015) Bayesian belief networks for human reliability analysis: a review of applications and gaps. Reliability Engineering & System Safety 139: 1–16. https://doi.org/10.1016/j.ress.2015.02.006 Momma H, Watanabe M, Hashimoto K, Tashiro S (2004) Loss of the full ocean depth ROV Kaiko-part 1: ROV Kaiko-a review. Proceedings of the 14th International Offshore and Polar Engineering Conference, Toulon, France, ISOPE-I-04-194. Mubarok K, Xu X, Ye XF, Zhong RY, Lu YQ (2018) Manufacturing service reliability assessment in cloud manufacturing. Proceedings of the 51st CIRP conference on manufacturing systems 72: 940–946. https://doi.org/10.1016/j.procir.2018.03.074 Nitonye S, Adumene S, Orji CU, Udo AE (2021) Operational failure assessment of Remotely Operated Vehicle (ROV) in harsh offshore environments. Pomorstvo 35(2): 285–296. https://doi.org/10.31217/p.35.2.10 Norris JR (1998) Markov chains. Cambridge University Press, London, the UK Odeyar P, Apel DB, Hall R, Zon B, Skrzypkowski K (2022) A review of reliability and fault analysis methods for heavy equipment and their components used in mining. Energies 15(17): 6263. https://doi.org/10.3390/en15176263 Onyekpe U, Palade V, Kanarachos S (2021) Learning to localise automated vehicles in challenging environments using Inertial Navigation Systems (INS). Applied Sciences 11(3): 1270. https://doi.org/10.3390/app11031270 Parhizkar T, Vinnem JE, Utne IB, Mosleh A (2021) Supervised dynamic probabilistic risk assessment of complex systems, part 1: general overview. Reliability Engineering & System Safety 208: 107406. https://doi.org/10.1016/j.ress.2020.107406 Patriarca R, Ramos M, Paltrinieri N, Massaiu S, Costantino F, Gravio GD, Boring RL (2020) Human reliability analysis: exploring the intellectual structure of a research field. Reliability Engineering & System Safety 203: 107102. https://doi.org/10.1016/j.ress.2020.107102 Paull L, Saeedi S, Seto M, Li H (2014) AUV navigation and localization: a review. IEEE Journal of Oceanic Engineering 39: 131–149. https://doi.org/10.1109/JOE.2013.2278891 Peeters FW, Basten JI, Tinga T (2018) Improving failure analysis efficiency by combining FTA and FMEA in a recursive manner. Reliability Engineering & System Safety 172: 36–44. https://doi.org/10.1016/j.ress.2017.11.024 Petrich J, Brown MF, Pentzer JL, Sustersic JP (2018) Side scan sonar based self-localization for small autonomous underwater vehicles. Ocean Engineering 161: 221–226. https://doi.org/10.1016/j.oceaneng.2018.04.095 Rachman A, Ratnayake RMC (2019) Machine learning approach for risk-based inspection screening assessment. Reliability Engineering & System Safety 185: 518–532. https://doi.org/10.1016/j.ress.2019.02.008 Rackwitz R (2001) Reliability analysis-a review and some perspectives. Structural Safety 23(4): 365–395. https://doi.org/10.1016/S0167-4730(02)00009-7 Rashki M, Azarkish H, Rostamian M, Bahrpeyma A (2019) Classification correction of polynomial response surface methods for accurate reliability estimation. Structural Safety 81: 101869. https://doi.org/10.1016/j.strusafe.2019.101869 Roy A, Chakraborty S (2023) Support vector machine in structural reliability analysis: a review. Reliability Engineering & System Safety 233: 109126. https://doi.org/10.1016/j.ress.2023.109126 Sahu BK, Subudhi B (2014) The state of art of autonomous underwater vehicles in current and future decades. Proceedings of the 1st International Conference on Automation, Control, Energy and Systems, Adisaptagram, India, 1–6. https://doi.org/10.1109/ACES.2014.6808014 Sarker IH (2021) Machine learning: algorithms, real-world applications and research directions. SN computer science 2(3): 160. https://doi.org/10.1007/s42979-021-00592-x Sharma A, Mukhopadhyay T, Rangappa SM, Siengchin S, Kushvaha V (2021) Advances in computational intelligence of polymer composite materials: machine learning assisted modeling, analysis and design. Archives of Computational Methods in Engineering 29(5): 3341–3385. https://doi.org/10.1016/j.cma.2021.114218 Shi Y, Gao XF, Pan G (2019) Design and load reduction performance analysis of mitigator of AUV during high speed water entry. Ocean Engineering 181: 314–329. https://doi.org/10.1016/j.oceaneng.2019.03.062 Shi Y, Lu ZZ, Chen SY, Xu LY (2018) A reliability analysis method based on analytical expressions of the first four moments of the surrogate model of the performance function. Mechanical Systems and Signal Processing 111: 47–67. https://doi.org/10.1016/j.ymssp.2018.03.060 Shi Y, Lu ZZ, He RY, Zhou YC, Chen SY (2020) A novel learning function based on kriging for reliability analysis. Reliability Engineering & System Safety 198: 106857. https://doi.org/10.1016/j.ress.2020.106857 Solanki RB, Kulkarni HD, Singh S, Varde PV, Verma AK (2020) Reliability assessment of passive systems using artificial neural network based response surface methodology. Annals of Nuclear Energy 144: 107487. https://doi.org/10.1016/j.anucene.2020.107487 Strutt JE (2006) Report of the inquiry into the loss of Autosub2 under the Fimbulisen. Available from https://eprints.soton.ac.uk/41098/.pdf [Accessed on Jul. 19, 2006] Sun ZL, Wang J, Li R, Tong C (2017) LIF: a new Kriging based learning function and its application to structural reliability analysis. Reliability Engineering & System Safety 157: 152–165. https://doi.org/10.1016/j.ress.2016.09.003 Tamascelli N, Campari A, Parhizkar T, Paltrinieri N (2024) Artificial intelligence for safety and reliability: a descriptive, bibliometric and interpretative review on machine learning. Journal of Loss Prevention in the Process Industries 90: 105343. https://doi.org/10.1016/j.jlp.2024.105343 Tanimoto J, Hagishima A (2005) State transition probability for the Markov model dealing with on/off cooling schedule in dwellings. Energy and Buildings 37: 181–187. https://doi.org/10.1016/j.enbuild.2004.02.002 Teixeira R, Nogal M, O'Connor A (2021) Adaptive approaches in metamodel-based reliability analysis: a review. Structural Safety 89: 102019. https://doi.org/10.1016/j.strusafe.2020.102019 Teng D, Feng YW, Chen JY (2022) Intelligent moving extremum weighted surrogate modeling framework for dynamic reliability estimation of complex structures. Engineering Failure Analysis 138: 106364. https://doi.org/10.1016/j.engfailanal.2022.106364 Thieme CA, Utne IB, Schjolberg I (2015) A risk management framework for unmanned underwater vehicles focusing on human and organizational factors. Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, Newfoundland, Canada. https://doi.org/10.1115/OMAE2015-41627 Titman AC (2015) Transition probability estimates for non-Markov multi-state models. Biometrics 71: 1034–1041. https://doi.org/10.1111/biom.12349 Toplak M, Močnik R, Polajnar M, Bosnić Z, Carlsson L, Boyer S (2014) Assessment of machine learning reliability methods for quantifying the applicability domain of QSAR regression models. Journal of Chemical Information and Modeling 54: 431–441. https://doi.org/10.1021/ci4006595 Trinchero R, Larbi M, Torun HM, Canavero FG, Swaminathan M (2019) Machine learning and uncertainty quantification for surrogate models of integrated devices with a large number of parameters. IEEE Access 7: 4056–4066. https://doi.org/10.1109/ACCESS.2018.2888903 Wang FP, Araújo DF, Li YF (2022) Reliability assessment of autonomous vehicles based on the safety control structure. Proceedings of the Institution of Mechanical Engineers, Part O: Journal of Risk and Reliability 237(2): 389–404. https://doi.org/10.1177/1748006X211069705 Wang HW, Tao ZQ, Si NP, Fu YL, Li T, Xiao HQ (2018a) Failure analysis of cathode materials for energy storage batteries in overcharge test. International Conference on Materials Applications and Engineering 2017 142: 1–5. https://doi.org/10.1051/matecconf/201814201007 Wang HX, Liu ZJ, Wang XJ, Graham T, Wang J (2021) An analysis of factors affecting the severity of marine accidents. Reliability Engineering & System Safety 210: 107513. https://doi.org/10.1016/j.ress.2021.107513 Wang LJ, Zhao HC, Yang XN (2008) The modeling and simulation for GPS/INS integrated navigation system. Proceedings of the 2008 International Conference on Microwave and Millimeter Wave Technology, Nanjing, China, 1991–1994. https://doi.org/10.1109/ICMMT.2008.4540881 Wang ZY, Yu JC, Zhang AQ, Sun ZY, Kang S (2018b) Development and experiments of the buoyancy adjusting system of long range AUV. Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kope, Japan. https://doi.org/10.1109/OCEANSKOBE.2018.8559046 Wei YH, Liu J, Hao SG, Hu JX (2019) Design of heading fault tolerant system for underwater vehicles based on double criterion fault detection method. Journal of Marine Science and Application (4): 530–541. https://doi.org/10.1007/s11804-019-00109-2 Whitcomb LL, Jakuba MV, Kinsey JC, Martin SC, Webster SE, Howland JC, Taylor CL, Gomez-Ibanez D, Yoerger DR (2010) Navigation and control of the nereus hybrid underwater vehicle for global ocean science to 10, 903 m depth: preliminary results. Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 594–600. https://doi.org/10.1109/ROBOT.2010.5509265 Wróbel K, Montewka J, Kujala P (2018) Towards the development of a system theoretic model for safety assessment of autonomous merchant vessels. Reliability Engineering & System Safety 178: 209–224. https://doi.org/10.1016/j.ress.2018.05.019 Xia SX, Zhou XF, Shi HB, Li S, Xu CH (2022) A fault diagnosis method with multi-source data fusion based on hierarchical attention for AUV. Ocean Engineering 266: 112595. https://doi.org/10.1016/j.oceaneng.2022.112595 Xu ZY, Saleh JH (2021) Machine learning for reliability engineering and safety applications: review of current status and future opportunities. Reliability Engineering & System Safety 211: 107530. https://doi.org/10.1016/j.ress.2021.107530 Yang C, Cai BP, Wu QB, Wang CYS, Ge WF, Hu ZM, Zhu W, Zhang L, Wang LT (2023a) Digital twin-driven fault diagnosis method for composite faults by combining virtual and real data, Journal of Industrial Information Integration 33: 100469. https://doi.org/10.1016/j.jii.2023.100469 Yang J, Xue Y, Dai XY, Lu HX, Yang M (2022a) An intelligent operational supervision system for operability and reliability analysis of operators manual actions in task implementation. Process Safety and Environmental Protection 158: 340–359. https://doi.org/10.1016/j.psep.2021.12.023 Yang R, Bremnes JE, Utne IB (2023b) Online risk modeling of autonomous marine systems: case study of autonomous operations under sea ice. Ocean Engineering 281: 114765. https://doi.org/10.1016/j.oceaneng.2023.114765 Yang XZ, He YH, Liao RY, Cai YQ, Ai J (2022b) Integrated mission reliability modeling based on extended quality state task network for intelligent multistate manufacturing systems. Reliability Engineering and System Safety 223: 108495. https://doi.org/10.1016/j.apor.2018.06.020 Yazdi M, Zarei E (2018) Uncertainty handling in the safety risk analysis: an integrated approach based on fuzzy fault tree analysis. Journal of Failure Analysis and Prevention 18: 392–404. https://doi.org/10.1007/s11668-018-0421-9 Yu M, Venkidasalapathy J, Shen Y, Quddus N, Mannan SM (2017) Bow-tie analysis of underwater robots in offshore oil and gas operations. Proceedings of the Offshore Technology Conference. Houston, Texas, USA. https://doi.org/10.4043/27818-MS Zarei E, Khan F, Abbassi R (2021) Importance of human reliability in process operation: a critical analysis. Reliability Engineering & System Safety 211: 107607. https://doi.org/10.1016/j.ress.2021.10760 Zhang J, Chowdhury S, Messac A (2012) An adaptive hybrid surrogate model. Structural and Multidisciplinary Optimization 46: 223–238. https://doi.org/10.1007/s00158-012-0764-x Zhang JH, Xiao M, Gao L (2019a) An active learning reliability method combining kriging constructed with exploration and exploitation of failure region and subset simulation. Reliability Engineering & System Safety 188: 90–102. https://doi.org/10.1016/j.ress.2019.03.002 Zhang LG, Lu ZZ, Wang P (2015) Efficient structural reliability analysis method based on advanced Kriging model. Applied Mathematical Modelling 39(2): 781–793. https://doi.org/10.1016/j.compstruct.2016.04.013 Zhang S, Hei WP, Chen DK, Chu JJ, Fan H (2019b) A dynamic human reliability assessment approach for manned submersibles using PMV-CREAM. International Journal of Naval Architecture and Ocean Engineering 148: 437–461. https://doi.org/10.1016/j.ijnaoe.2019.03.002 Zhang TD, Liu SH, He X, Huang H, Hao KD (2019c) Underwater target tracking using forward-looking sonar for autonomous underwater vehicles. Sensors 20(1): 102. https://doi.org/10.3390/s20010102 Zhou T, Si JK, Wang LY, Xu C, Yu XY (2022) Automatic detection of underwater small targets using forward-looking sonar images. IEEE Transactions on Geoscience and Remote Sensing 60: 1–12. https://doi.org/10.1109/TGRS.2022.3181417 Zhou ZY, Liu JC, Yu JZ (2021) A survey of underwater multi-robot systems. IEEE/CAA Journal of Automatica Sinica 9(1): 1–18. https://doi.org/10.1109/JAS.2021.1004269 Zhu D, Cheng XL, Yang L, Chen YS, Yang SX (2021) Information fusion fault diagnosis method for deep sea human occupied vehicle thruster based on deep belief network. IEEE Transactions on Cybernetics 52(9): 9414–9427. https://doi.org/10.1109/TCYB.2021.3055770 Zhu JP, Li A, Qin FJ, Che H, Wang JG (2022a) A novel hybrid method based on deep learning for an integrated navigation system during DVL signal failure. Electronics 11(19): 2980. https://doi.org/10.3390/electronics11192980 Zhu SP, Keshtegar B, Ben Seghier MEA, Zio E, Taylan O (2022b) Hybrid and enhanced PSO: novel first order reliability method-based hybrid intelligent approaches. Computer Methods in Applied Mechanics and Engineering 393: 114730. https://doi.org/10.1016/j.apor.2018.06.020 Zhuo XX, Liu MY, Wei Y, Yu GD, Qu FZ, Sun R (2020) AUV-aided energy-efficient data collection in underwater acoustic sensor networks. IEEE Internet of Things Journal 7(10): 10010–10022. https://doi.org/10.1109/JIOT.2020.2988697 Zio E (2009) Reliability engineering: old problems and new challenges. Reliability Engineering & System Safety 94: 125–141. https://doi.org/10.1016/j.cam.2018.06.012 Zio E (2013) Monte Carlo simulation: the method. Springer Press, London, UK Zio E, Baraldi P, Patelli E (2006) Assessment of the availability of an offshore installation by monte carlo simulation. International Journal of Pressure Vessels and Piping 83: 312–320. https://doi.org/10.1016/j.ijpvp.2006.02.010 Zio E, Marella M, Podofillini L (2007) A Monte Carlo simulation approach to the availability assessment of multi-state systems with operational dependencies. Reliability Engineering & System Safety 92: 871–882. https://doi.org/10.1016/j.ress.2006.04.024
