
Method to Determine the Propulsion Characteristics of a Ship Moving in Ice
https://doi.org/10.1007/s11804-025-00667-8
-
Abstract
In designing modern vessels, calculating the propulsion performance of ships in ice is important, including propeller effective thrust, number of revolutions, consumed power, and ship speed. Such calculations allow for more accurate prediction of the ice performance of a designed ship and provide inputs for designers of ship power and automation systems. Preliminary calculations of ship propulsion and thrust characteristics in ice can enable predictions of full-scale ice resistance without measuring the propeller thrust during sea trials. Measuring propeller revolutions, ship speed, and the power delivered to propellers could be sufficient to determine the propeller thrust of the vessel. At present, significant difficulties arise in determining the thrust of icebreakers and ice-class ships in ice conditions. These challenges are related to the fact that the traditional system of propeller/hull interaction coefficients does not function correctly in ice conditions. The wake fraction becomes negative and tends to minus infinity starting from a certain value of the propeller advance coefficient. This issue prevents accurate determination of the performance characteristics, thrust, and rotational speed of the propulsors. In this study, an alternative system of propeller/hull interaction coefficients for ice is proposed. It enables the calculation of all propulsion parameters in ice based on standard hydrodynamic tests with self-propulsion models. An experimental method is developed to determine alternative propeller/hull interaction coefficients. A prediction method is suggested to determine propulsion performance in ice based on the alternative interaction coefficient system. A case study applying the propulsion prediction method for ice conditions is provided. This study also discusses the following issues of ship operation in ice: the scale effect of icebreaker propellers and the prospects for introducing an ice interaction coefficient.Article Highlights● The traditional interaction coefficient system and calculation method hinder the determination of ship propulsion parameters in ice because the wake fraction becomes negative and approaches minus infinity starting from a certain value of the propeller advance coefficient.● A novel approach, which is based on a new alternative system of coefficients describing propeller/hull interaction, is proposed to define ship propulsion parameters in ice.● The suggested procedures provide an opportunity to investigate ice interaction coefficients. -
1 Introduction
Ship thrust in ice is influenced by two factors: total ice resistance and the pulling performance of the propulsion system. In recent years, significant progress has been made in experimental and calculation techniques to determine ice resistance. The efforts of ITTC ice experts have led to detailed recommendations for model tests in ice basins with nonpropelled (ITTC, 2017a) and propelled models (ITTC, 2017b). With these guidelines in hand, the ice resistance of icebreakers and ice-going vessels under design can be accurately predicted.
Modern methods with high prediction potential are used to calculate ice resistance (Lindqvist, 1989; Su et al., 2010; Su et al., 2011; Tan et al., 2014; Valanto, 2009). These references, along with numerous other studies, enable the determination of ice resistance with sufficient accuracy for design purposes, particularly under close-to-limit ice conditions.
Research on the operation of icebreaker propulsion systems in the vast majority of cases has focused on propeller interaction with ice. In this field, significant advancements have ensured the strength of the propulsion system, including azimuth thrusters, and provided insights into the dynamics of the propeller–shafting–engine system under ice loads (Andryushin et al., 2013; Dobrodeev et al., 2017; Ikonen et al., 2015). At present, the mathematical modeling of propeller interaction with ice is rapidly developing. For example, Chao et al. (2017) considered variations in thrust coefficient KT and torque coefficient KQ during these processes. However, the hydrodynamic issues of icebreaker propellers have not been adequately studied. Specific hydrodynamic problems of icebreaker propellers, such as cavitation, were discussed solely by Alekseev et al. (1993) and Walker et al. (1994).
The issues of propeller/hull interaction for ships in ice were discussed in the 1980s by Juurmaa and Segercrantz (1981) and by the ITTC ice committee (Schwarz et al., 1987) during the analysis of self-propelled model test results obtained for an R-class icebreaker in various basins around the world. Leiviskä (2003) analyzed the propeller/hull interaction coefficients of a ship with steerable gondola (pod) sailing ahead and astern in ice. The experimental method for determining model ice resistance adopted in the HSVA ice basin (2011) can determine thrust deduction coefficient values. However, the authors are not aware of any publication by researchers in this basin where the obtained results were generalized. Luo et al. (2018) described the method of investigating the propeller wake model of a single-screw heavy-tonnage ice-class vessel with ice on the underwater hull surface. Therefore, the issues of propeller/hull interaction in ice conditions have not received adequate attention, although these concerns directly relate to the calculation of ship thrust characteristics in ice.
Traditional methods for determining thrust in ship theory encounter technical difficulties related to defining propeller/hull interaction coefficients (Kanevskii et al., 2017). The effective thrust developed by the propulsion system can be easily calculated and experimentally determined under bollard pull conditions. Furthermore, effective thrust can be calculated at sufficiently high ship speeds. Consequently, different approximation formulas have been used to determine the effective thrust of icebreakers and icegoing vessels in ice. For example, in Su et al. (2010), the net thrust is approximated by a square parabola:
$$T_E=T_E^{\mathrm{boll}}\left[1-\frac{1}{3} \frac{V_S}{V_{\mathrm{ow}}}-\frac{2}{3}\left(\frac{V_S}{V_{\mathrm{ow}}}\right)^2\right]$$ (1) In this formula, TEboll represents the net thrust of the propulsion system in bollard pull conditions, and Vow denotes the maximum ship speed in open water at a given power level. The approximation factors in this formula are the same for any vessel.
Accurately calculating the thrust characteristics of a ship's propulsion system is challenging, which is a serious obstacle to determining full-scale ship ice resistance. This calculation can be achieved only by measuring the thrust of the ship's propulsion system during sea trials and determining the thrust deduction coefficient based on model test data (Sodhi et al., 2001; Spencer and Jones, 2001). The relationship between full-scale and model experiments is frequently examined by comparing power consumption (Jones and Lau, 2006; Lau, 2015).
Typically, icebreakers and ice-going vessels are multishaft ships to absorb greater power. This design feature adds complexity to calculations because of the need for special-purpose procedures (Kanevskii et al., 2020).
Currently, the model test data obtained in ice basins offers a straightforward method for assessing only the limiting ice capability of icebreakers and ice-going vessels, specifically the maximum thickness of ice through which the ship can continuously move at the maximum power of its main engines with a minimum stable speed. Evaluating ice performance in a wider range is possible but requires numerous overload tests, which are typically not conducted. Therefore, information on performance in ice is lacking for most projects. Consequently, the thrust, torque, number of revolutions, and efficiency of propellers in a wide range of ship operating modes in ice cannot be accurately predicted. Considering this lack of information, assessing the efficiency and optimizing the performance of icebreakers and ice-going vessels are impossible. In this context, predicting the performance of icebreakers in ice for the full range of operational conditions is a serious problem today. This work proposes a method for calculating the propulsion performance and thrust characteristics of a ship operating in ice conditions. The initial data for the method are provided by model tests in hydrodynamic and ice basins, including towing resistance in open water and ice, hydrodynamic characteristics of propellers in open water, and propeller/hull interaction coefficients. The proposed method for evaluating ship propulsion performance in ice is suitable for single- and multi-shaft vessels equipped with propellers and propulsion pods.
2 Hydrodynamics of propeller/hull interaction in ice
2.1 Problems of traditional approaches in evaluating ship performance
A conventional approach to estimating the propulsion performance of a ship in open water is based on model tests in towing tanks. These tests are used to determine water resistance versus model speed, hydrodynamic characteristics of an isolated propeller, and propeller/model hull interaction coefficients. The latter are identified by comparing the hydrodynamic characteristics of open-water and behind-hull propellers. Three classical coefficients of interaction for a given speed are determined following relevant procedures mentioned in ITTC (2017c): w—wake fraction, t—thrust deduction coefficient, and ηR—relative rotative efficiency.
Wake fraction w is given as
$$w=1-\frac{J_o}{J}, K_{T_o}=K_T$$ (2) where Jo, J are the propeller advance coefficients in open water and behind the hull, respectively; KTo, KT are the propeller thrust coefficients in open water and behind the hull, respectively.
Eq. (2) outlines the relationships between propeller advance coefficients in open water and behind the hull. According to Eq. (2), the wake fraction w is determined at identical thrust in open water and behind the hull. In this context, unlike ITTC (2017c), the subscript "о" denotes "open water".
Relative rotative efficiency ηR is defined by
$$\eta_R=\frac{K_{Q_o}\left(J_o\right)}{K_Q(J)}$$ (3) The open-water torque coefficient in Eq. (3) is determined by the same open-water advance coefficient, which is calculated using the wake fraction.
The thrust deduction coefficient t is calculated using the formula:
$$t=\frac{T_M+F_D-R_{\mathrm{TM}}}{T_M}$$ (4) In Eq. (4), the following symbols are used:
— TM represents the total thrust of a ship model propeller; here, subscript M means ship model;
— FD denotes an additional towing force due to the difference in the model and full-scale resistance coefficients;
— RTM refers to the towing resistance of the ship model.
When Formulas (2) – (4) are applied at small advance coefficients, difficulties may arise in defining the wake fraction w. The dependence of hydrodynamic coefficients of thrust and torque on the advance coefficient in open water and behind the hull has specific features. At small advance coefficients J ≤ 0.2 ÷ 0.3, the following relations are found: KT(J) < KTo (Jo) and KQ(J) < KQo (Jo). In using Formula (2), the wake fraction value becomes negative and tends to infinity as J → 0. Figure 1 illustrates the hydrodynamic propeller characteristics of the R-class icebreaker Franklin, as documented by Michailidis and Murdey (1981). This figure clearly demonstrates the aforementioned specific feature.
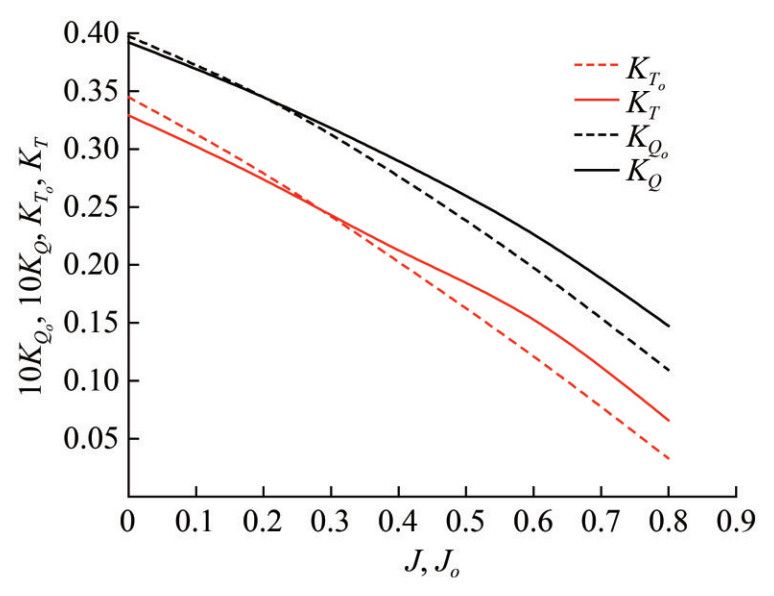 Figure 1 Hydrodynamic propeller characteristics of the R-class icebreaker Franklin
Figure 1 Hydrodynamic propeller characteristics of the R-class icebreaker FranklinWhen Formula (2) is applied to the hydrodynamic propeller characteristics of the R-class icebreaker Franklin, it yields negative wake fractions that tend to minus infinity as the advance coefficient J approaches bollard pull conditions. Figure 2 shows the wake fraction versus advance coefficient, which is calculated using the data in Figure 1.
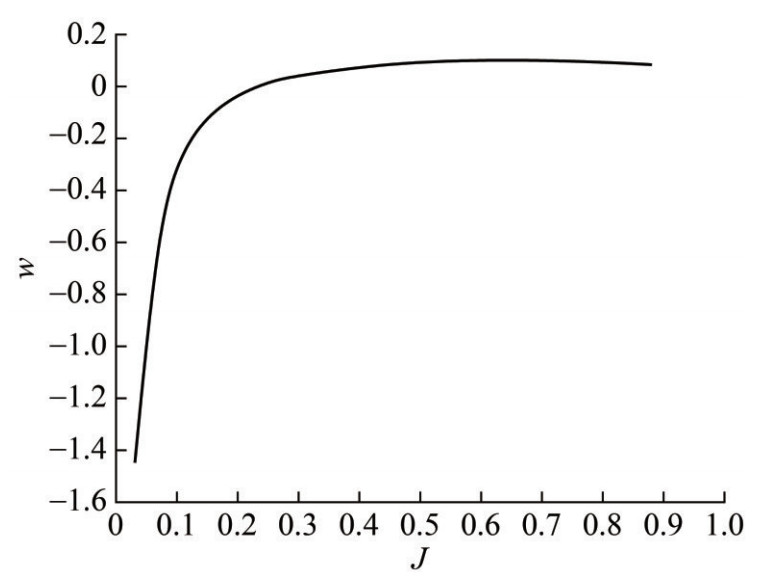 Figure 2 Wake fraction versus advance coefficient for the propeller of the R-class icebreaker Franklin
Figure 2 Wake fraction versus advance coefficient for the propeller of the R-class icebreaker FranklinThe situation depicted in Figure 1 is common. According to the authors' experience, up to 90% of the models tested in hydrodynamic basins at the Krylov State Research Centre (St. Petersburg, Russian) exhibit this abnormality. The icebreaker Vladivostok, which is discussed below, is an example in this case. Hydrodynamic laboratories typically do not publish data on the operation of propulsion systems behind model hulls, which causes difficulty in providing a longer list of ships based on the literature.
This issue is the primary obstacle to applying traditional methods for calculating the propulsion performance of a ship operating at small advance coefficients. However, small advance coefficients are typical for ships moving in ice.
2.2 Alternative system of interaction coefficients
The Krylov State Research Centre has developed an alternative system of coefficients to characterize propeller/hull interaction when the propeller operates near bollard pull conditions to address the aforementioned challenges (Kanevskii and Klubnichkin, 2017). As in the traditional system, this alternative system of coefficients includes three coefficients for a given ship speed: the coefficient of hull influence on thrust iTB, the coefficient of hull influence on torque iQB, and the thrust deduction coefficient t. This suggested system of coefficients is universal and applicable in all scenarios where the traditional system is applied.
The propeller/hull interaction coefficients in the alternative system are derived from experimental data obtained in hydrodynamic test basins. These coefficients are determined from experimental data at a specific advance coefficient J. For this purpose, the open-water thrust and torque coefficients KTo, KQo of propellers are obtained from experimental plots. The interaction coefficients itself are defined by the following relations at J = Jо:
— coefficient of hull influence on thrust:
$$i_{\mathrm{TB}}(J)=\frac{K_T(J)}{K_{T_o}\left(J_o\right)}$$ (5) — coefficient of hull influence on torque:
$$i_{\mathrm{QB}}(J)=\frac{K_Q(J)}{K_{Q_o}\left(J_o\right)}$$ (6) — thrust deduction coefficient:
$$t(J)=\frac{T_M+F_D-R_{\mathrm{TM}}}{T_M}$$ (7) The procedure for determining the thrust deduction coefficient remains the same as in the traditional system. Figure 3 illustrates the alternative system for defining the interaction coefficient.
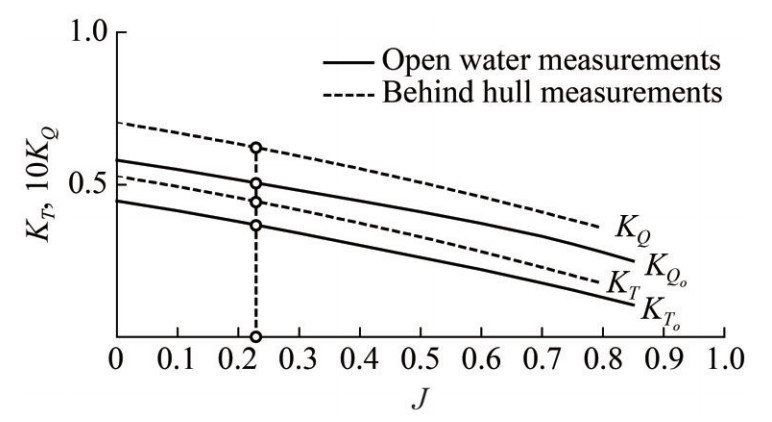 Figure 3 Illustration of the alternative system for propeller/hull interaction coefficients
Figure 3 Illustration of the alternative system for propeller/hull interaction coefficientsA distinctive feature of the alternative system is the flow velocities around the propeller in open water and behind the model hull are equal, which leads to equal advance coefficients; however, the propeller thrusts are not the same.
Figure 4 shows the alternative system for the interaction coefficients of the propeller of the R-class icebreaker Franklin, as documented by Michailidis and Murdey (1981).
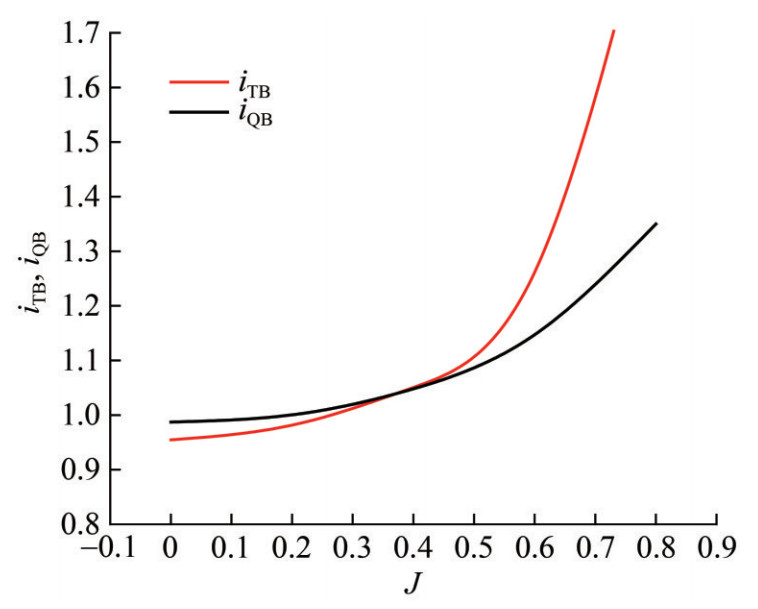 Figure 4 Interaction coefficients iTB and iQB versus propeller advance coefficient for the R-class icebreaker Franklin: an alternative system (Michailidis and Murdey, 1981)
Figure 4 Interaction coefficients iTB and iQB versus propeller advance coefficient for the R-class icebreaker Franklin: an alternative system (Michailidis and Murdey, 1981)2.3 Method for experimental determination of alternative interaction coefficients
The interaction coefficients of the alternative system, as previously mentioned, can be derived from the same propulsion tests used to determine traditional interaction coefficients. However, identifying these coefficients in the advance coefficient range J < 0.3, which is typical of ships in ice conditions, requires a substantial set of experiments. In this case, towed propulsion tests are conducted with a self-propelled model rigidly connected to a towing carriage. These experiments are performed at a fixed speed of the model with variations in propeller revolutions (overload tests). In this case, the model is subjected to a braking force from the towing carriage FD, which simulates ice resistance.
Such investigations have been conducted in propulsion studies of R-class icebreakers (Michailidis and Murdey, 1981) and the icebreaker Healy (Jones and Lau, 2006; Jones, 2004). However, these explorations did not apply the alternative system of interaction coefficients. Using the traditional system, only the thrust deduction coefficient t could be determined by overload tests. In addition, the experimental results occupy a significant area on the graph of thrust deduction coefficient t versus icebreaker model speed. Notably, when the overload test data are presented as thrust deduction coefficient versus advance coefficient t = t (J), the results align in a single line (Kanevskii and Klubnichkin, 2017).
At the Krylov Centre, overload tests with alternative interaction coefficients are conducted for each model of icebreakers and ice-going vessels. In self-propulsion tests, the propeller revolutions are constant and selected based on the given power. The speed of the model ship varies from zero to full speed. In this case, presenting the overload test results versus the advance coefficient J is inconvenient for propulsion estimates because the relation for determining the advance coefficient includes propeller revolutions:
$$J=\frac{V}{n D}$$ (8) where V is the ship speed, n denotes the number of propeller revolutions, and D represents the propeller diameter.
The most convenient way of presenting the overload test results is versus parameter KDE, which is defined as
$$K_{\mathrm{DE}}=\frac{J}{\sqrt{K_E}}$$ (9) where KE is the effective thrust of the propeller, which is defined as
$$K_E=\frac{T_E}{\rho n^2 D^4}$$ (10) where ρ refers to water density, and TE is the propeller effective thrust determined in overload tests by the following formula:
$$T_E=R_{\mathrm{TM}}-F_D$$ (11) Eq. (11) is derived from Eq. (4) of ITTC (2017c).
The parameter KDE is useful for presenting overload test data because it is a non-dimensional parameter that does not contain propeller revolution and is not zero in bollard pull conditions. Notably, the KDE value can be estimated using dimensional parameters by the following formula:
$$K_{\mathrm{DE}}=\frac{V D}{\sqrt{T_E / Z_p \rho}}$$ (12) In Formula (12), ZP is the number of propellers, and ZP = 1 or 2. Formula (12) is also applicable for ZP > 2 if the diameters of the propellers are the same. The process of determining the parameter KDE for different propeller diameters is described in Kanevsky et al. (2020).
As an example, Figure 5 presents alternative interaction coefficients versus KDE for an ice-going vessel.
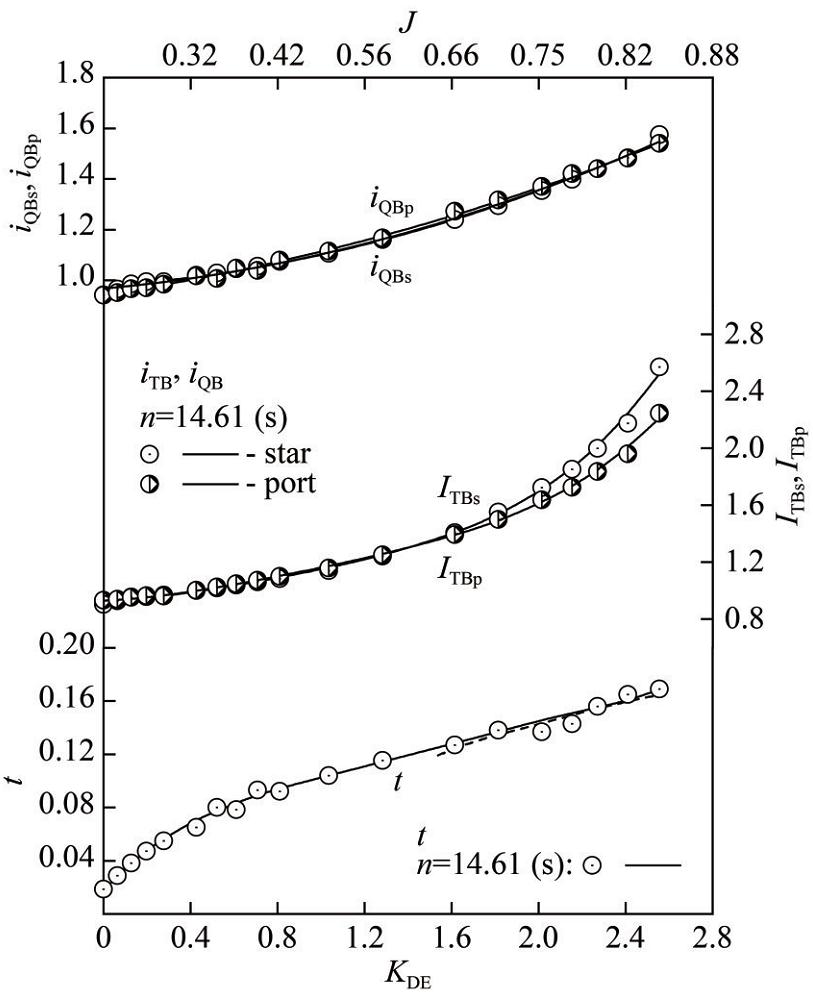 Figure 5 Interaction coefficients t, iTB, and iQB of the alternative system for an ice-going vessel
Figure 5 Interaction coefficients t, iTB, and iQB of the alternative system for an ice-going vesselAt the top of this figure, the values of the advance coefficient J are shown. In overload tests, the non-dimensional parameters J and KDE are related by the following dependence.
Notably, after self-propelled model tests, three values are obtained at a given speed: w—wake fraction, t—thrust deduction coefficient, and ηR—relative rotative efficiency.
Overload tests provide three dependencies of alternative coefficients on the parameter KDE : iTB (KDE)—coefficient of hull influence on thrust, iQB(KDE)—coefficient of hull influence on torque, and t (KDE)—thrust deduction coefficient.
This situation is not accidental and is related to the fact that the towing force FD varies during overload tests at a given speed V. An icebreaker can move at the same speed in different ice conditions, such as in level or broken ice. The ship speed in ice conditions does not determine the ice resistance. Naturally, the power consumed by the icebreaker depends on the ice resistance.
2.4 Prediction of ship propulsion performance in ice conditions
The prediction of ship propulsion performance in ice conditions follows the recommendations of ITTC (2017c). The key difference between the suggested procedure and the generally accepted techniques is the introduction of alternative interaction coefficients.
The dataset for predicting ship propulsion in ice includes ship speed VS, where the subscript S refers to the ship; wetted surface of the ship SS; propeller diameter DS; number of propulsive units ZP = 1 or 2; water density in full-scale conditions ρS; electrо-mechanical efficiency ηSH; functions of hydrodynamic characteristics of open-water propellers designed for the ship KToS(JS), KQoS(JS), which are scaled to full size (ITTC, 2017c); and alternative interaction coefficients as a function of the parameter KDE. An alternative interaction coefficient includes iTB (KDE)—coefficient of hull influence on thrust, iQB (KDE)—coefficient of hull influence on torque, t (KDE)—thrust deduction coefficient, and total ice resistance of the ship RIS.
The prediction of ship propulsion in ice starts with estimating the parameter KDE, which is defined as
$$K_{\mathrm{DE}}=\frac{V_S D_S}{\sqrt{R_{\mathrm{IS}} / Z_p \rho}}$$ (13) The value of the KDE parameter is used to determine iTB, iQB, and t.
The prediction of ship propulsion performance in ice-free water is based on the relation $ \frac{K_{\mathrm{T}_o \mathrm{S}}}{J_S^2}=f\left(J_S\right)$. This function can be readily derived using the hydrodynamic characteristics of full-scale propellers in open water KToS(JS). The same function is utilized for predicting the ice performance of ships.
The 1978 ITTC Performance Prediction Method uses the total resistance coefficient in ice-free water CTS. To reduce the difference between the proposed procedure and the ITTC method, we introduce the total resistance coefficient:
$$C_I=\frac{2 R_{\mathrm{IS}}}{\rho_S V^2 S_S}$$ (14) where SS is the wetted surface of the ship hull. Unlike in ice-free water, the total ice resistance coefficient is assumed to be free of scale effects at slow speeds VS < 7 knots, and its value is the same for the ship and its model:
$$C_{\mathrm{IS}}=C_{\mathrm{IM}}$$ (15) Then, the expression for $ \frac{K_{\mathrm{T}_o \mathrm{S}}}{J_S^2}$ using the alternative interaction coefficients can be re-written as follows:
$$\frac{K_{\mathrm{T}_o \mathrm{S}}}{J_S^2}=\frac{1}{Z_p} \cdot \frac{S_S}{2 D_S^2} \cdot \frac{C_{\mathrm{IS}}}{(1-t) i_{\mathrm{TB}}}$$ (16) The value of $ \frac{K_{\mathrm{T}_{{o}} \mathrm{S}}}{J_S^2}$calculated from Eq. (16) allows for the determination of the advance coefficient at given ship speeds and ice conditions JTS and the propeller torque coefficient KQoTS.
A distinctive feature of the alternative interaction coefficients is that Js = Jo; that is, all coefficients are determined at a constant advance coefficient. Consequently, the number of revolutions is defined as
$$n_S=\frac{V_S}{J_{\mathrm{TS}} D_S}, (\mathrm{r} / \mathrm{s})$$ (17) Power consumed by each propeller:
$$P_{\mathrm{DIS}}=2 {\rm{ \mathsf{ π}}} \cdot \rho_S \cdot n_S^3 \cdot D_S^5 \cdot K_{\mathrm{Q}_o \mathrm{TS}} \cdot i_{\mathrm{QB}} \cdot 10^{-3}, (\mathrm{kW})$$ (18) Propeller thrust:
$$T_S=\left(\frac{K_{\mathrm{T}_{{o}} \mathrm{S}}}{J_S^2}\right) \cdot J_{\mathrm{TS}}^2 \cdot i_{\mathrm{TB}} \cdot \rho_S \cdot n_S^2 \cdot D_S^4 \cdot 10^{-3}, (\mathrm{kN})$$ (19) Propeller torque:
$$Q_S=K_{\mathrm{Q}_o \mathrm{TS}} \cdot i_{\mathrm{QB}} \cdot \rho_S \cdot n_S^2 \cdot D_S^5 \cdot 10^{-3}, (\mathrm{kN} \cdot \mathrm{m})$$ (20) Effective power:
$$P_E=0.5 \cdot C_{\mathrm{IS}} \cdot \rho_S \cdot V_S^3 \cdot S_S \cdot 10^{-3}, (\mathrm{kW})$$ (21) Hydrodynamic efficiency:
$$\eta_D=\frac{P_E}{Z_P P_{\mathrm{DIS}}}$$ (22) Hull efficiency:
$$\eta_H=\frac{i_{\mathrm{TB}}(1-t)}{i_{\mathrm{QB}}}$$ (23) Relative rotative efficiency:
$$\eta_R=1$$ (24) Efficiency:
$$\eta=\eta_S \eta_H \eta_{\mathrm{SH}}$$ (25) Here, ηSH is the electromechanical efficiency, and ηS refers to the open-water propeller efficiency:
$$\eta_S=\frac{J_{\mathrm{TS}}}{2 {\rm{ \mathsf{ π}}}} \frac{K_{\mathrm{T}_o \mathrm{S}}}{K_{\mathrm{Q}_o\mathrm{TS}}}$$ (26) 3 Results and discussion
3.1 Case study
The diesel-electric icebreaker Vladivostok, with project number 21900М, was selected for the case study. The icebreaker was constructed in 2015 by Vyborg Shipyard. This double-decker vessel features two 360° azimuth thrusters with a power of 2.9 МW. The ship was designed for the Icebreaker 6 class by the Russian Maritime Register of Shipping, as shown in Figure 6.
 Figure 6 Icebreaker Vladivostok, Pr. 21900М
Figure 6 Icebreaker Vladivostok, Pr. 21900МDuring the design phase, the Krylov Centre conducted a full cycle of tests, including hydrodynamic and ice basin tests. Based on the self-propulsion tests in the hydrodynamic tank, the functions for the alternative system of propeller/hull interaction coefficients were determined. These functions are presented in Figure 7.
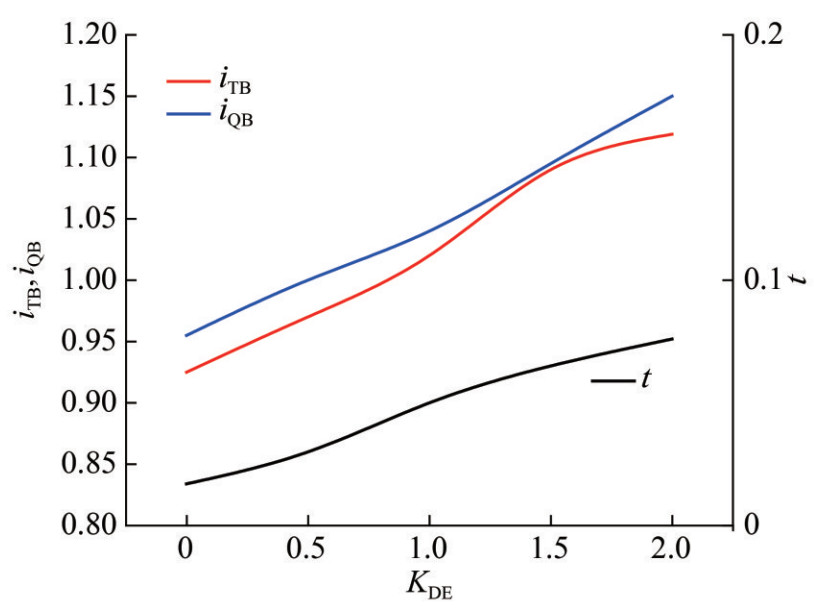 Figure 7 Interaction coefficients t, iTB, and iQB of the alternative system for the icebreaker Vladivostok
Figure 7 Interaction coefficients t, iTB, and iQB of the alternative system for the icebreaker VladivostokThe propulsion performance of the icebreaker in 1.5 m-thick level ice at a speed of 3.0 knots was calculated using Eqs. (13)–(26).
The initial data inputs were as follows:
— ship wetted surface SS = 3 400 m2;
— propeller diameter DS = 4.5 m;
— number of propulsors ZP = 2;
— water density in full-scale ρS = 1 025 kg/m3;
— electro-mechanical efficiency ηSH = 0.95;
— hydrodynamics characteristics of 2.9 МW azimuth thrusters in open water KToS (JS), KQoS (JS);
— alternative interaction coefficients versus KDE;
— total ice resistance of ship RIS = 1 460 kN.
The calculations yield the following results:
— icebreaker speed VS = 1.543 m/s;
— KDE = 0.260;
— coefficient of hull influence on thrust iTB = 0.949;
— coefficient of hull influence on torque iQB = 0.980;
— thrust deduction coefficient t = 0.022;
— total ice resistance coefficient CIS =0.352;
— $ \frac{K_{\mathrm{T}_{{o}} \mathrm{S}}}{J_S^2}$ = 15.942;
— advance coefficient JTS = 0.155;
— thrust coefficient KToTS = 0.383;
— torque coefficient KQoTS = 0.057 5;
— number of propeller revolutions nS = 2.213 1/s = 132.6 RPM;
— power consumed by each propeller PDS = 7 224.8 kW;
— thrust of azimuth thruster pod TS = 746 kN;
— propeller torque QS = 520.3 kN⋅m;
— effective power PE = 2 253.2 kW;
— hydrodynamic efficiency ηD = 0.156;
— hull efficiency ηH = 0.947;
— efficiency η = 0.148;
— azimuth thruster efficiency in open water ηS = 0.164. The analysis results of level ice trial data for the Vladivostok and Novorossiysk icebreakers are presented in Tables 1 and 2 below (Kostylev et al., 2016; Lopashev et al., 2017).
Table 1 Analysis results of ice trial data for the Vladivostok icebreaker (moving ahead)Test run Speed (kn) Power (kW) RPM Ice resistance or thrust of propulsors (kN) 3.1 2.28 2 × 9 000 139.2 1 663 3.2 2.54 2 × 9 000 139.5 1 653 3.3 0.61 2 × 7 250 128.1 1 497 Table 2 Analysis results of ice trial data for the Novorossiysk icebreaker (moving ahead)Test run Speed (kn) Power (kW) RPM Ice resistance or thrust of propulsors (kN) 1.1 4.30 9 000 141.72 1 582.6 1.2 3.30 7 181 130.50 1 389.6 1.3 2.30 5 440 118.14 1 179.8 1.4 0.97 3 410 100.04 891.4 The calculation results for propeller RPMs, as shown in Tables 1 and 2 and Figure 8, reveal a strong correlation with the ice trial data. The deviations between these results are likely due to the absence of the ice shroud (ice pieces submerged by the underwater surface of the icebreaker hull) and the lack of ice on the water surface during self-propulsion tests.
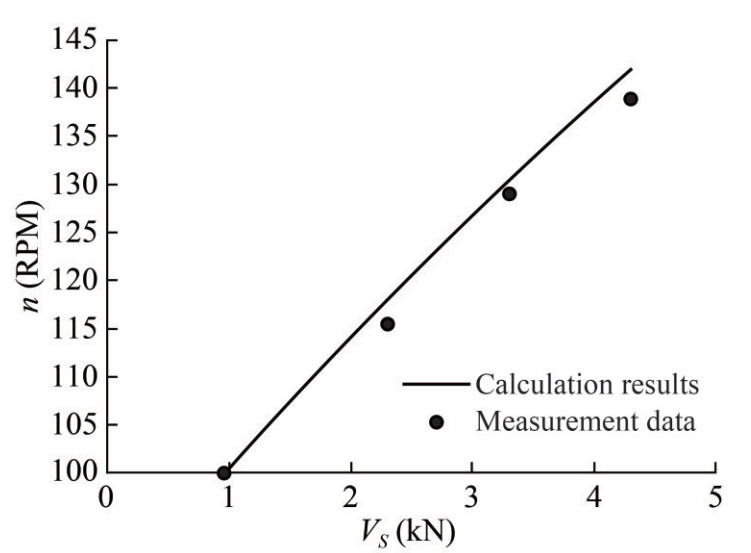 Figure 8 Propeller RPM n versus speed VS of the Novorossiysk icebreaker during ice trials
Figure 8 Propeller RPM n versus speed VS of the Novorossiysk icebreaker during ice trialsThe calculation results for ice resistance shown in Tables 1 and 2 were extrapolated to the ice thickness of 1.5 m and a standard bending strength of 500 kPa. The extrapolation to the ice thickness of h was conducted according to the recommendations of ITTC (2017a) and Jochmann et al. (2014) using the following relationship:
$$R_I\left(h_1\right)=R_I\left(h_2\right)\left(\frac{h_1}{h_2}\right)^{1.5}$$ (27) where RI represents the ice resistance, and h refers to ice thickness.
The extrapolation of the ice trial data for the Vladivostok icebreaker to the standard bending strength was conducted according to the recommendations of ITTC (2017a) and Jochmann et al. (2014) using the following relationship:
$$R_I=(1-a) R_{I, \text { meas }}+a \frac{\sigma_{f, \text { target }}}{\sigma_{f, \text { meas }}} R_{I, \text { meas }}$$ (28) Here, a indicates the portion of the ice resistance due to forces dependent on the bending strength of the ice, σf represents the bending strength, meas denotes the measured value, and target refers to the required value.
Calculations of resistance to the icebreaker, according to Eqs. (27)–(28), moving in a 1.5 m-thick level ice field with a standard bending strength of 500 kPa, are shown in Figure 9 below.
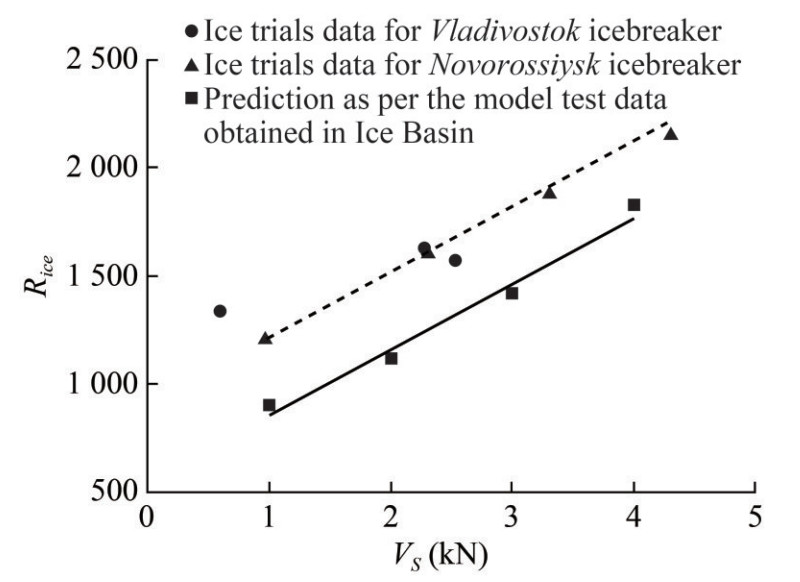 Figure 9 Ice resistance Rice for the Vladivostok icebreaker in a 1.5 m-thick ice field (bending strength of 500 kPa)
Figure 9 Ice resistance Rice for the Vladivostok icebreaker in a 1.5 m-thick ice field (bending strength of 500 kPa)These icebreakers, as per the model test data obtained in the Ice Basin, show predictions that qualitatively align with the results of full-scale trials. Discrepancies may arise because the calculation ignored the effect of the ice shroud and the ice on the water surface during self-propulsion tests on the hydrodynamic parameters of propeller/hull interaction.
Figure 10 compares the dependence of the icebreaker effective thrust calculated by the proposed method and Formula (1) at Vow = 17.4 knots. This graph clearly indicates an error in Formula (1) compared with the suggested method.
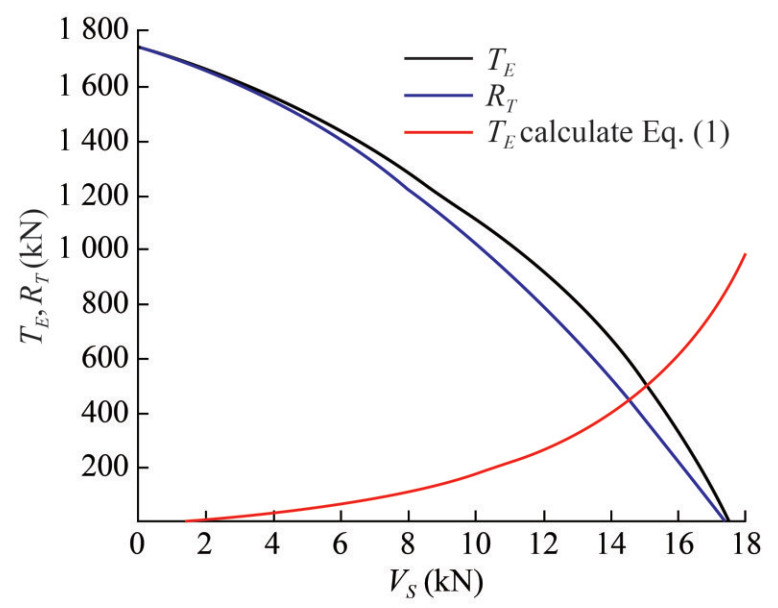 Figure 10 Comparison of the net thrust characteristics of the icebreaker calculated by the suggested method and Formula (1)
Figure 10 Comparison of the net thrust characteristics of the icebreaker calculated by the suggested method and Formula (1)3.2 Ice interaction coefficients
Traditionally, calculating the propulsion and thrust of the icebreaker in ice conditions assumes that interaction coefficients determined for ice-free water remain unchanged in ice conditions. However, the flow conditions around the hull differ because ice submerged by the hull accumulates on the underwater hull surface.
The assumption of a constant propeller/hull interaction coefficient is largely explained by the experimental challenges in evaluating these coefficients in model tests and full-scale trials. The approach using the alternative system of interaction coefficients allows for a more comprehensive investigation of this problem.
The procedure for experimentally determining the alternative interaction coefficients using self-propelled model tests in an ice model basin is described below.
The proposed method includes towed-propulsion tests in ice, where the self-propelled model is rigidly connected to the towing carriage, as well as tests of isolated propellers in open water. The preferred option for these tests is the use of propellers specifically designed for the ship under study. However, self-propelled tests in the ice basin are conducted with stock propellers whose geometric characteristics closely match those of the ship propellers.
In the self-propelled tests with the application of an additional tow force in the ice basin, the additional force FD should be determined from
$$F_D=\rho_M \frac{V_M^2}{2} S_M\left(C_{\mathrm{IM}}-C_{\mathrm{IS}}\right)$$ (29) where CIM and CIS are the coefficients of the total ice resistance of the model and the ship, respectively. Currently, we assume that CIM = CIS. Thus, we obtain
$$F_D=0$$ (30) At model tests in an ice field of a given thickness h and flexural strength σf, the ice sheet is divided into 3–4 sections where the model moves with a given speed VMi, with i representing the section number. The number of sections depends on the model size and the ice sheet length. These tests are performed according to the ITTC guidance (2017a and 2017b). As the model moves at a speed of VMi along each section, the number of propeller revolutions takes three fixed values nMij, with j = 1, 2, 3. The revolution numbers are chosen such that, in the range from nMi1 tо nMi3, an unknown revolution number exists at which the model reaches a self-propulsion point (where the force of interaction between the model and the carriage is equal to FD = 0). Standard processing of the model test data in ice provides the propeller revolution number nMi, which corresponds to the self-propulsion point FD = 0 for each speed VMi. The thrust and torque on each propeller are measured during these ice tests.
By comparing the ice experiment data with open-water propeller characteristics (Figure 3), the alternative interaction coefficients can be determined using Eqs. (5)–(7).
In the described tests conducted using the well-known procedures of ITTC (2017b), the ice resistance of the model RIMi(VMi) can be calculated.
By comparing the test results obtained in hydrodynamic basins with those from ice basins, we can assess the impact of ice cover on the values and variation laws of interaction coefficients.
The Krylov Ice Basin has recently launched such studies. Below are some preliminary findings. Figure 13 presents the alternative interaction coefficients as a function of KDE obtained in hydrodynamic and ice basins. Tests were conducted on the triple-shaft icebreaker model.
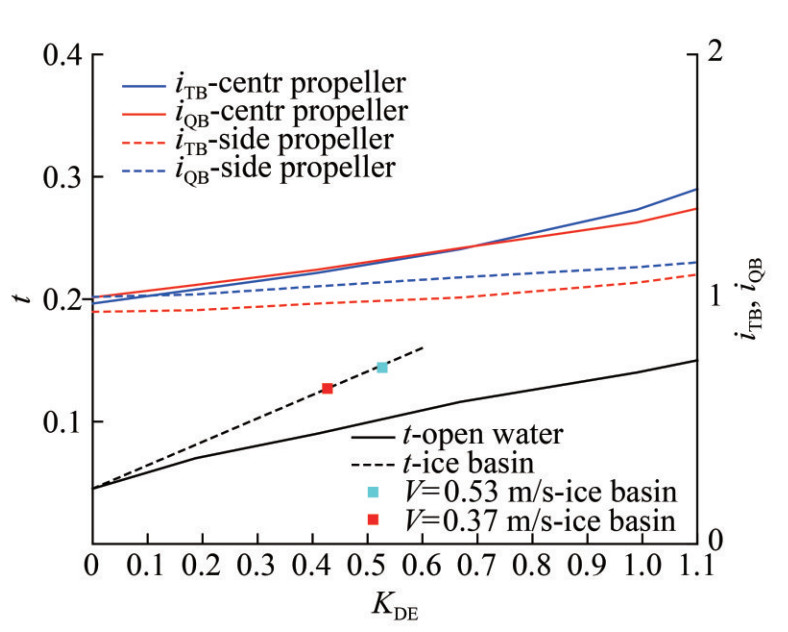 Figure 11 Alternative interaction coefficients as a function of the parameter KDE obtained in hydrodynamic and ice basins for the triple-shaft icebreaker model
Figure 11 Alternative interaction coefficients as a function of the parameter KDE obtained in hydrodynamic and ice basins for the triple-shaft icebreaker modelThe analysis of the presented results leads to the following conclusions. The effect of ice cover on the coefficient of hull influence on thrust iTB and the coefficient of hull influence on torque iQB is relatively minor. Therefore, based on the state-of-the-art knowledge of physical processes, these coefficients are assumed not to change significantly in ice.
The thrust deduction coefficient t is notably increased. This fact should not be surprising because theoretical studies on the interaction of an ideal propeller with a solid body indicate that the thrust deduction coefficient should increase in such cases (Basin and Miniovich, 1963). These theoretical considerations only suggest the trend in the thrust deduction coefficient variation but do not allow us to calculate its value due to the use of a highly simplified propeller model and the assumption of an ideal fluid. However, the increase in the thrust deduction coefficient in ice may necessitate some adjustments in the self-propulsion test procedures in ice basins. This aspect highlights the importance of further investigation into the physical laws governing propeller/hull interaction in ice.
4 Conclusion
A novel approach for defining ship propulsion parameters in ice shows great promise. This method is based on a new alternative system of coefficients that describe propeller/hull interaction. The system is valid and effective at small advance coefficients J ≤ 0, 3, which is typical for a ship operating in ice conditions where the wake fraction w is often negative.
An important aspect of the alternative interaction coefficients is that they can be derived using traditional data from hydrodynamic and ice experiments. Essentially, these alternative interaction coefficients are obtained through minor changes in processing technologies for established experimental relations. Equally important is that the equivalence of the alternative and traditional interaction coefficient systems was demonstrated with such accuracy that no scale effect was observed (Kanevskii and Klubnichkin, 2017).
The alternative interaction coefficients enable comprehensive calculation of ship propulsion in ice during the design phase, including propeller effective thrust, number of revolutions, consumed power, and ship speed. These calculations not only allow for more accurate predictions of the ice performance of a designed ship by correcting the definition of the effective thrust but also provide inputs for ship power and automation system designers. Overall, this method can enhance the accuracy of determining propulsion power for a vessel already in the design phase. Preliminary calculations of ship propulsion and thrust characteristics in ice would allow for the prediction of full-scale ice resistance without the need to measure propeller thrust during sea trials. Measuring propeller revolutions, ship speed, and the power delivered to propellers is sufficient to determine propeller thrust. These measurements can be conducted using standard instruments on board.
The experimental methods described here enable the determination of alternative interaction coefficients not only in hydrodynamic basins but also during self-propelled model tests in ice. The ability to compare alternative interaction coefficients determined in hydrodynamic and ice basins opens the way for investigating how these coefficients are influenced by ice conditions. This analysis will allow for the exploration of interaction coefficients specific to ice conditions and their application.
Calculating ship propulsion performance in ice offers new opportunities for analyzing data obtained during full-scale ship trials in ice.
Competing interest The authors have no competing interests to declare that are relevant to the content of this article. -
Figure 1 Hydrodynamic propeller characteristics of the R-class icebreaker Franklin
Figure 2 Wake fraction versus advance coefficient for the propeller of the R-class icebreaker Franklin
Figure 3 Illustration of the alternative system for propeller/hull interaction coefficients
Figure 4 Interaction coefficients iTB and iQB versus propeller advance coefficient for the R-class icebreaker Franklin: an alternative system (Michailidis and Murdey, 1981)
Figure 5 Interaction coefficients t, iTB, and iQB of the alternative system for an ice-going vessel
Figure 6 Icebreaker Vladivostok, Pr. 21900М
Figure 7 Interaction coefficients t, iTB, and iQB of the alternative system for the icebreaker Vladivostok
Figure 8 Propeller RPM n versus speed VS of the Novorossiysk icebreaker during ice trials
Figure 9 Ice resistance Rice for the Vladivostok icebreaker in a 1.5 m-thick ice field (bending strength of 500 kPa)
Figure 10 Comparison of the net thrust characteristics of the icebreaker calculated by the suggested method and Formula (1)
Figure 11 Alternative interaction coefficients as a function of the parameter KDE obtained in hydrodynamic and ice basins for the triple-shaft icebreaker model
Table 1 Analysis results of ice trial data for the Vladivostok icebreaker (moving ahead)
Test run Speed (kn) Power (kW) RPM Ice resistance or thrust of propulsors (kN) 3.1 2.28 2 × 9 000 139.2 1 663 3.2 2.54 2 × 9 000 139.5 1 653 3.3 0.61 2 × 7 250 128.1 1 497 Table 2 Analysis results of ice trial data for the Novorossiysk icebreaker (moving ahead)
Test run Speed (kn) Power (kW) RPM Ice resistance or thrust of propulsors (kN) 1.1 4.30 9 000 141.72 1 582.6 1.2 3.30 7 181 130.50 1 389.6 1.3 2.30 5 440 118.14 1 179.8 1.4 0.97 3 410 100.04 891.4 -
Alekseev YN, Beljashov VA, Sazonov KE (1993) Hydrodynamic problems of propellers for icebreaking ships. Proceedings of 12th International Conference on Port and Ocean Engineering under Arctic Conditions (POAC'93), Hamburg, Germany, 351-358 Andryushin AV, Hänninen S, Heideman T (2013) "Azipod" azimuth thruster for large capacity arctic transport ship with high ice category Arc7. Ensuring of operability and operating strength under severe ice conditions. Proceedings of 22nd International Conference on Port and Ocean Engineering under Arctic Conditions (POAC'13), Espoo, Finland Basin АМ, Miniovich IYa (1963) Propeller Theory and Calculation. Gosudarstvennoe soyuznoe izdatelstvo promyshlennosti, Leningrad, USSR (in Russian) Chao W, Sheng-xia S, Xin C, Li-yu Y (2017) Numerical simulation of hydrodynamic performance of ice class propeller in blocked flow-using overlapping grids method. Ocean Engineering 141: 418-426. https://doi.org/10.1016/j.oceaneng.2017.07.028 Dobrodeev A, Sazonov K, Andryushin A, Fedoseev S, Gavrilov S (2017) Experimental studies of ice loads on pod propulsors of Ice-Going support ships. Proceedings of 24th International Conference on Port and Ocean Engineering under Arctic Conditions (POAC'17), Busan, Korea HSVA (2011) Model tests in ice for 60 MW polar icebreaker. Hamburg Ship Model Basin, Report IO 462/11, App. C Ikonen T, Peltokorpi O, Karhunen J (2015) Inverse ice-induced moment determination on the propeller of an ice-going vessel. Cold Regions Science and Technology 112: 1-13. https://doi.org/10.1016/j.coldregions.2014.12.010 ITTC (2017a) ITTC 7.5-02-04-02.1. Recommended procedures and guidelines. Resistance test in Ice. International Towing Tank Conference ITTC (2017b) ITTC 7.5-02-04-02.2. Recommended procedures and guidelines. Propulsions test in Ice. International Towing Tank Conference ITTC (2017c) ITTC 7.5-02-03-01.4. Recommended procedures and guidelines. Performance. Propulsion. 1978 ITTC Performance Prediction Method. International Towing Tank Conference Jochmann P, Lau M, Huffmeier J, Konno A, Leiviskä T, von Bock und Polach R, Römeling J, Sazonov K, Westerberg V, Yue Q, Sampson R (2014) Final report and recommendations to the 27th ITTC. Specialist Committee on Ice. Proceedings 27th Conference ITTC, Copenhagen, Denmark, 726-747 Jones SJ (2004) Resistance and propulsion model tests of the USCGC Healy (Model 546) in ice. IOT Report LM-2 Jones SJ, Lau M (2006) Propulsion and maneuvering model tests of the USCGC healy in ice and correlation with full-scale. 7th International Conference and Exhibition on Performance of Ships and Structures in Ice (ICETECH 06), Banff, Alberta, Canada Juurmaa K, Segercrantz H (1981) On propulsion and its efficiency in Ice. Sixth Ship Technology and Research (STAR) Symposium, Proceedings SNAME, Ottawa, Canada, 229-237 Kanevskii GI, Klubnichkin AM (2017) Propeller-hull interaction coefficients: classic vs alternative system. Proceedings of the 5th International Symposium on Marine Propulsors 3, Espoo, Finland Kanevskii GI, Klubnichkin AM, Ryzhkov AV, Sazonov KE (2017) Propulsion prediction of the Arctic combatant moving in the ice field. Proceedings of the 9th International Conference Navy and Shipbuilding Nowadays, St. Petersburg, Russia, 57-63 Kanevskii GI, Klubnichkin AM, Sazonov KE (2020) Propulsion performance prediction method for multi shaft vessels. Brodogradnja 72(3): 27-36. https://doi.org/10.21278/brod71303 Kostylev A, Sazonov K, Timofeev O, Yegiazarov G, Solovyev A, Yegorov D, Shtrambrant V (2016) Full-scale ice trials of Vladivostok icebreaker. Sudostroyeniye 6: 9-12 (in Russian) Lau M (2015) Model-scale/full-scale correlation of NRC-ocre's model resistance, propulsion and maneuvering test results. Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering OMAE2015, St. John's, Newfoundland, Canada. https://doi.org/10.1115/OMAE2015-42114 Leiviskä T (2003) The propulsion of an ice going ship ahead and astern. Proceedings of 17th International Conference on Port and Ocean Engineering under Arctic Conditions (POAC'03), Trondheim, Norway Lindqvist G (1989) A straightforward method for calculation of ice resistance of ships. Proceedings of 10th International Conference on Port and Ocean Engineering under Arctic Conditions (POAC'89), Luleå, Sweden, 722-735 Lopashev K, Sazonov K, Timofeev O (2017) Full-scale ice trials of Novorossiysk icebreaker in the Kara Sea. Transactions of the Krylov State Research Centre 3(381): 35-42 (in Russian) https://doi.org/10.24937/2542-2324-2017-3-381-35-42 Luo WZ, Guo CY, Wu TC, Xu Pei, Su YM (2018) Experimental study on the wake fields of a ship attached with model ice based on stereo particle image velocimetry. Ocean Engineering 164: 661-671. https://doi.org/10.1016/j.oceaneng.2018.07.014 Michailidis M, Murdey DC (1981) Performance of CCGS Franklin in lake Melville. Proceedings of Sixth Ship Technology and Research (STAR) Symposium, Ottawa, Canada, 311-322 Schwarz J, Williams FV, Alekseyev YN, Enkvist E, Kitagawa H, Maksutov DD, Narita S, Tatinclaux JC (1987) Report of the performance in Ice-covered waters committee. Proceedings 18th International Towing Tank Conference 1, Kobe, Japan, 527-566 Sodhi DS, Griggs DB, Tucker WB (2001) Ice performance tests of USCGC healy. Proceedings of 16th International Conference on Port and Ocean Engineering under Arctic Conditions (POAC'01), Ottawa, Canada, 893-908 Spencer D, Jones SJ (2001) Model-scale/full-scale correlation in open water and ice for Canadian Coast Guard "R-Class" icebreakers. Journal of Ship Research 45(4): 249-261 https://doi.org/10.5957/jsr.2001.45.4.249 Su B, Riska K, Moan T (2010) A numerical method for the prediction of ship performance in level ice. Cold Regions Science and Technology 60: 177-188. https://doi.org/10.1016/j.coldregions.2009.11.006 Su B, Riska K, Moan T (2011) Numerical simulation of local ice loads in uniform and randomly varying ice conditions. Cold Regions Science and Technology 65: 145-159. https://doi.org/10.1016/j.coldregions.2010.10.004 Tan X, Riska K, Moan T (2014) Effect of dynamic bending of level ice on ship's continuous-mode icebreaking. Cold Reg. Sci. Technol. 106-107: 82-95. https://doi.org/10.1016/j.coldregions.2014.06.011 Valanto P (2009) On computed-ice load distributions, magnitudes and lengths on Ship Hulls moving in Level Ice. Proceedings of 20th International Conference on Port and Ocean Engineering under Arctic Conditions (POAC'09), Luleå, Sweden, 494-509 Walker D, Bose N, Yamaguchi H (1994) Hydrodynamic performance and cavitation of a propeller in a simulated ice-blocked flow. Journal of Offshore Mechanics and Arctic Engineering 116: 185-189 https://doi.org/10.1115/1.2920149
