 2015, Vol. 35
2015, Vol. 35引用本文 |

| 干树半潜平台的选型设计 |

2. 北京高泰深海技术有限公司,北京 100011;
3. 中海油研究总院,北京 100027
2. COTEC Offshore Engineering Co. Ltd., Beijing 100011, China;
3. CNOOC Research Institute, Beijing 100027, China
海洋石油采油平台主要有两种采油形式:一种是湿树采油;另一种为干树采油。干树采油的特点为采油树位于甲板上,其优点是海底油井和表面干树直接通过生产立管垂直连接,可在平台上体安装钻塔,使浮式平台自行实现钻井、完井功能,避免了远期油田开发中需要调用其他钻井设施而使平台生产中断的问题。另外,由于采油树位于甲板上,因此维修方便,易于管理,还省去了将海底采油树回接到平台上体的硬件费用。
目前较常见的干树形式深水浮式平台主要有TLP和SPAR,但是随着水深逐渐加深其对安装技术的要求逐渐提高。TLP平台在水深超过1 200 m后,筋腱的造价急剧上升而导致整体造价不经济;SPAR平台由于整体型深很长,船体部分安装时必须采取横向拖航、扶正等步骤,上部组块的安装则必须在海上吊装或者浮托安装,整个平台的安装周期较长且存在一定风险[1]。
因此,综合考虑以上因素,海洋工程界提出了干树半潜式生产平台,这样不仅具有干树井口的优点而且可以完全规避TLP、SPAR平台自身的缺点。此平台具有普通半潜平台不受水深限制、造价低、安装简易等特点,同时又具有SPAR及张力腿平台干式采油树采油设备便于安装,检测和维修的优点。
为了便于张紧器设计和保证立管的安全,干树采油形式对平台运动,尤其是垂荡运动要求很高,这就加大了干树半潜平台的设计难度。目前干树半潜平台基本处于概念设计和尺度选型阶段。近年来国内外对于半潜干树平台研究逐步增多,提出了一些概念和方案。
FloaTEC公司提出了两种干树半潜[2],一种是Truss Semi,见图 1,另一种是E-Semi,见图 2。Truss Semi结合了Semi Truss Spar的特点;E-Semi采用了升沉板结构,与Truss Semi不同的是,该平台的升沉板可以根据作业状态收起和放下。这两种平台运动性能均比较优良,但缺点是安装复杂[2-3]。SBM公司提出一种向内倾斜立柱的干树半潜平台,立柱截面积自上而下逐渐增大,控制了上部组块的跨距,其运动性能也较为优秀,但建造和内部舱室的布置划分具有一定挑战[3]。Technip公司提出一种展开式平台EDP,主体由驳船式甲板、四个立柱和浮箱组成。该平台的安装、运动性能均较为优良,缺点是拖航稳性具有一定挑战[3]。HOE公司提出了一种八立柱平台(Paired-Column Semi)[4],见图 3。在保证运动性能的基础上,组块架设在内侧四个立柱上,减小组块跨距。该平台的建造、拖航性能均较为方便,其整体结构性能具有一定的挑战[4]。INTECSEA公司的MANSOUR等人[5]针对边际油田开发也提出了一种新式的半潜干树深水平台,对于边际油田开发来说最重要的是减少油田开发成本,使用高性能的半潜干树深水平台能够节约很多成本。国内的JIANG Zhe等[6]也针对中国南海区域提出了一种半潜干树平台概念(DTP),目的是为适应中国南海恶劣条件,解决在深水油气开发中遇到的挑战。
 |
| 图 1 Truss Semi |
 |
| 图 2 E-Semi |
 |
| 图 3 Paired-Column Semi |
本文针对传统的四立柱四浮箱形式的半潜平台进行主尺度设计,力图在此基础上使其满足建造、拖航及干树采油要求,以适应中国南海恶劣条件。
1 干树半潜平台的选型 1.1 选型控制条件及极限环境条件干树半潜平台首先要满足干树采油要求,平台升沉运动性能必须良好。由于半潜式平台水线面面积较大,系泊系统刚度对于平台整体垂向刚度的影响很小,因而控制干树半潜平台升沉运动主要在于整体尺度的调整上。另外,应争取使平台横纵摇周期偏离波浪主要能量范围而又不足以被低频二阶载荷激起共振。
本文对于平台的设计目标有:
(1)控制平台垂向运动幅值在4 m以内;
(2)平台需要满足建造、拖航的要求。考虑到国内造船厂及海工建造基地的船坞水深不是较浅,半潜平台的拖航吃水应控制在8 m以下;
(3)船体钢材质量需要控制到可接受范围内,参考HOE及FloaTEC的设计,船体结构质量在2×104t左右。
设计平台目标海域为中国南海,表 1为极端设计条件。设计海浪谱为Jonswap谱,Gamma(谱峰升高因子)值为3.55,海浪谱值与周期关系如图 4所示。从图 4中可以看出,波浪的能量在周期小于10 s和大于20 s的范围内分布较小。
 |
| 图 4 极限海况波浪谱 |
| 表 1 极端设计环境条件 |

1.2 平台主尺度设计
干树半潜平台的运动控制主要在升沉方向。图 5为典型半潜平台与深吃水半潜平台升沉RAO(幅值响应算子)的比较。半潜平台的RAO升沉曲线有三个关键点:
 |
| 图 5 传统半潜平台与深吃水平台RAO对比 |
(1)波频范围内的小峰β;
(2)曲线与横坐标接近的平衡周期Te;
(3)平台升沉的固有周期Tn。
波频小峰β的大小由固有周期及平台吃水控制[7]。该值的大小取决于平台固有周期及平台吃水,即:

|
(1) |
式中:D为平台吃水;Tn为平台升沉固有周期;g为重力加速度。式(1)的值越大,波频小峰β值越小。
平衡周期Te由浮箱表现排水量与立柱排水量比值决定[8],α为浮箱表现排水量与立柱表现排水量之比:
|
(2) |
式中:Cmp为浮箱附加质量系数;Vp为浮箱排水量;Vc为立柱排水量。则平台所受垂向力消失时的平衡周期Te表达式为:

|
(3) |
固有周期Tn由平台质量m和立柱横截面积A决定,即:

|
(4) |

|
(5) |
式中:Cm为平台附加质量系数;K33为升沉刚度;A为立柱截面积;ρ为海水密度。
通过优化浮箱、立柱的尺度,采纳合理的吃水能够实现平台升沉运动的控制目标。参照极限海况波浪谱(图 4),该海况下波浪主要能量范围为10 s至20 s,因而设计平台的升沉平衡周期应在20 s附近,平台的升沉固有周期应大于22 s。
在控制平台升沉运动的同时,需要关注平台立柱跨距、平台建造、拖航吃水及拖航稳性的要求。立柱跨距不宜太大,太大的跨距不利于组块结构设计;平台的吃水不宜太大,这样会影响组块的安装;考虑到国内建造场地和船厂船坞水深,平台拖航吃水不宜太大,需控制平台整体质量并优化浮箱尺寸。
本文平台主尺度的规划流程如图 6所示。
 |
| 图 6 主尺度规划流程 |
将组块质量、船体质量等信息编制成Sizing表格,通过多次搜索,确定兼顾各方面要求的干树半潜采油平台主尺度信息如表 2所示。
| 表 2 干树半潜平台主尺度及主要性能 |

2 干树半潜平台性能分析 2.1 平台稳性校核
平台稳性校核分为三部分:
(1)平台建造场地停靠稳性校核;
(2)平台拖航稳性校核;
(3)平台在位稳性校核。
对于完整稳性校核,平台在三个工况下的初稳高应大于1.0 m,恢复力矩与风倾力矩面积比应大于1.3。
对于破舱稳性校核,平台在三个工况下初稳高应大于1 m,从平衡位置到进水点角度应大于7°,进水高度应大于4 m,面积比应大于2.0 [9]。
使用MOSES建立稳性校核模型[10]见图 7。完整稳性校核结果如表 3所示,破舱稳性校核结果如表 4所示,校核结果表明,该平台在三种工况下稳性均能满足设计要求。
 |
| 图 7 干树半潜平台稳性校核模型 |
| 表 3 干树半潜平台完整稳性校核结果 |
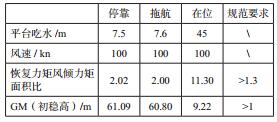
| 表 4 干树半潜平台破舱稳性校核结果 |

2.2 平台运动性能
针对极限设计条件,使用WAMIT软件建立干树半潜平台面元模型进行水动力分析计算[11]。平台面元模型如图 8所示。平台升沉运动RAO(幅值响应算子)如图 9所示,平台纵摇、横摇运动RAO如图 10所示。由图 9可以发现,该平台波频小峰峰值较小,平衡周期在20 s附近,基本跨越了波浪的主要能量范围,平台升沉固有周期为23.60 s,受波浪影响较小;纵摇、横摇运动RAO在波频范围内的值较小,固有周期在32 s附近,基本不受波频能量的影响。
 |
| 图 8 干树半潜平台面元模型 |
 |
| 图 9 干树半潜平台升沉运动RAO |
 |
| 图 10 干树半潜平台纵摇/横摇运动RAO |
针对四个波浪来向的极限海况下平台运动响应进行频域分析,计算结果如表 5所示。该平台的升沉最大幅值为3.692 m,最大横摇/纵摇幅值为2.422°。
| 表 5 干树半潜平台极限海况运动响应 |

由于平台吃水较深,平台立柱直径较大,该平台在流场作用下的受力会较大,这对系泊系统设计提出了挑战。该平台整体高度较高,对组块的整体吊装提出了较高的要求。针对该平台形式进行系泊设计及安装分析研究将是进一步工作的方向。对平台进行了初步的系泊系统设计,并对考虑TTR(张紧式立管)和不考虑TTR的两种情况使用Orcaflex软件进行了整体时域耦合运动性能计算。考虑到平台及系泊系统的对称性,对0~90°环境波浪来向进行了计算,系泊缆及TTR特性如表 6所示。时域运动分析结果如表 7所示。
| 表 6 系泊缆及TTR特性 |

| 表 7 干树半潜平台极限海况下运动响应时域分析结果 |
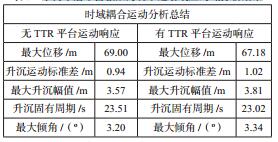
相比于平台巨大的静水刚度,系泊系统与TTR提供的刚度较小,对于平台升沉的固有周期有所影响,但影响不大。当平台时域计算模型考虑TTR时,平台升沉运动有所加大,这主要是由于TTR张紧器提供的额外刚度缩短了平台升沉固有周期所致;平台整体位移及倾角由于TTR的存在而有所减小。计算结果表明,平台运动性能满足设计要求。
3 总结本文针对传统的四立柱四浮箱形式半潜平台进行主尺度设计以满足干树采油平台性能要求,主尺度设计重点在于控制其升沉运动及保证拖航能力。针对设计要求提出一种干树半潜平台主尺度形式,稳性校核及运动分析结果表明:该平台运动性能满足干树采油要求,平台稳性满足规范要求。
由于平台吃水较深,平台立柱直径较大,该平台在流场作用下的受力会较大,这对系泊系统设计提出了挑战。该平台整体高度较高,对组块的整体吊装提出了较高的要求。
针对该平台形式进行系泊设计及安装分析研究将是进一步工作的方向。
| [1] |
王丽勤, 侯金林, 庞然, 等. 深水油气田开发工程中的基础应用探讨[J]. 海洋石油, 2011, 31(4): 87-92. |
| [2] |
FloaTEC. RPSEA CTR 1402 : Ultra-Deepwater Dry Tree System for Drilling and Production in the Gulf of Mexico, Stage 1 Study Report[J]. USA, 2009. |
| [3] |
姜哲, 谢彬, 谢文会. 新型深水半潜式生产平台发展概况综述[J]. 海洋工程, 2011, 29(3): 132-138. |
| [4] |
Houston Offshore Engineering. RPSEA CTR 1402b : UltraDeepwater Dry Tree System for Drilling and Production, Stage 1 Final Report[J]. USA, 2009. |
| [5] |
MANSOUR A M, JAMES J, HEIDARI H, et al. Novel DryTree Semisubmersible Solutions for Deepwater Marginal Field Development[J]. Offshore Technology Conference, 2014. |
| [6] |
JIANG Zhe, XIE Bin, XIE Wenhui, et al. A Numerical Investigation on the Hydrodynamic Performance of a New Dry Tree Semisubmersible Concept[C]//The Tenth ISOPE Pacific/ Asia Offshore Mechanics Symposium. International Society of Offshore and Polar Engineers, 2012.
|
| [7] |
FALTINSENO M. 船舶与海洋工程环境载荷[M]. 2008: 58-61.
|
| [8] |
MOLINB. 海洋工程水动力学[M]. 2012: 169-172.
|
| [9] |
American Bureau of Shipping(ABS). Houston[M]. Mobile Offshore Drilling Unit, Part 3 : Hull Construction and Equipment. 2012.
|
| [10] |
Ultramarine, Inc. MOSES Reference Manual[OL]. USA, 2005. http : //www. ultramarine. com/hdesk/document/ref_man. htm.
|
| [11] |
WAMIT, I nc. WAMIT V6.4[J]. USA, 2006. |