 2013
2013

 , 叶权圣, 秦健南, 易豪武, 黄爽
, 叶权圣, 秦健南, 易豪武, 黄爽 制糖工业中加热过程的稳定有着十分重要的意 义:一方面它能提升澄清过程的效果,对后续工段 的稳定有着重要的作用,对产品质量有着重要的影 响;另一方面它能显著减少蒸汽消耗,为制糖企业 节省成本,提高经济效益。加热过程的稳定是由温 度控制决定的,因此,加热过程的温度控制是制糖 工业中的一个重要课题。加热系统惯性大、滞后大, 控制难度也大,针对制糖工业中的温度控制,研究 其对象特性,找出一种使系统稳定、调节时间短且 超调量小的最佳控制方案显得十分重要。
制糖工业中加热过程通常采用模糊控制器、 PID控制器进行调节。由于模糊控制和PID控制都 存在一定的不足,难以满足制糖工业中日益严格和 高标准控制品质的要求,这些要求主要有系统稳定、 准确度高、调节时间短、超调量小、抗干扰性强。
模糊控制是一种逐渐得到广泛应用的智能控制 方法,它能够保证系统在快速响应的同时保持较小 的超调量,且对被控参数变化有较强的适应能力, 但却不可避免地在控制过程中存在稳态误差。PID 控制技术以其结构简单、稳定可靠、容易实现、理 论体系成熟等特点,在实际工程中得到了极为广泛的应用。它可以消除系统的稳态误差,但其快速性 与超调量之间不可调和的矛盾关系、对被控对象参 数变化较差的适应能力,使得这种算法在一定程度 上难以满足高标准的技术要求[1]。将PID算法和模 糊算法的优点有机结合在一起,实现优势互补,形 成模糊PID算法,吸引了国内外许多学者的关注, 得到了广泛的应用,取得了许多研究成果。
模糊控制既能够保证系统快速响应,同时又能 有效抑制系统响应的超调量,能够适应被控对象参 数的变化并具有较强的抗干扰能力,这种优势能够 很大程度上弥补PID控制应用于参数变化较大的系 统中存在的不足,但模糊控制在其控制过程中不可 避免地存在稳态误差[2]。
PID控制具有良好的稳态特性,然而其快速性 与超调量之间不可调和的矛盾使得这种算法在一定 程度上难以满足高标准的技术要求。同时,对于具 有一组固定参数的PID控制器来说,当被控对象模 型由于某种原因产生剧烈的参数变化时,根据原有 模型确定的PID控制器参数通常难以维持系统的控 制品质,因此,要确定最优PID控制器的控制参数 变得十分困难。
由此可知,探索一种能够结合模糊算法和PID 算法的优点,有能力适应对象参数变化剧烈且结构 相对简单,适用于实际工程应用的控制方法就显得 十分重要。
模糊控制是一种逐渐得到广泛应用的智能控制 方法,特别适用于具有非线性、大滞后、强耦合特 性的复杂系统。模糊控制是模糊集合理论中的一个 重要方面,是以模糊集合化、模糊语言变量和模糊 逻辑推理为基础的一种计算机数字控制。从线性控 制到非线性控制的角度分类,模糊控制是一种非线 性控制;从控制器的智能性看,模糊控制属于智能 控制的范畴。与经典控制和现代控制方法相比,模 糊控制模拟人的逻辑思维方法,将以人的语言表达 的控制策略改写为模糊控制规则。模糊控制不需精 确建立被控对象的数学模型,只需将操作、工艺技 术人员的控制经验归纳总结,整理成多条控制规则, 由模糊控制器来实现[3]。其系统架构如图1所示。

|
图1 模糊控制器系统结构框图 |
模糊控制器主要由模糊化、知识库、模糊推理 和解模糊3个部分组成。模糊化的输入量为误差信 号e,由e生成误差变化率ec,将e和ec进行论域 转换后得到E和EC,再根据隶属函数的定义可以分 别求出E和EC对各模糊集合的隶属度,至此完成 了模糊化的过程。知识库,顾名思义,其储存着有 关模糊控制器的一切知识,它决定着模糊控制器的 性能,是模糊控制器的核心。模糊推理有每个采样 时刻的输入,依据模糊控制规则推导出控制作用, 而模糊控制规则这一组模糊条件语句可以导出一个 输入输出空间上的模糊关系,推理机按着模糊推理 的合成规则进行运算,从而求得控制作用。解模糊 可以看作模糊化的反过程,它要由模糊推理结果产 生ut 的数值,作为模糊控制器的输出[3]。
模糊控制算法实现有3种方式,即查表法、硬 件模糊控制器和软件模糊推理,应用最为广泛的是 查表法。查表法是输入论域上的点到输出论域的对 应关系,它已经是经过了模糊化、模糊推理和解模 糊的过程,它可以离线计算得到,模糊控制器在线 运行时,进行查表就可以了,因而可以大大加快在 线运行的速度。
PID控制器是一种线性控制器,它将偏差的比 例(P)、积分(I)、微分(D)通过线性组合构成控制量,对过程对象进行控制,故称为PID控制器,其结构 如图2所示。

|
图2 PID控制器结构框图 |
PID的控制规律为:

常规PID之所以在大量控制算法相继产生的今 天仍然在实际工程中得到最为广泛的应用,其主要 原因在于其显著的优点:结构简单,易于实现,并 且对于大多数过程都具有良好的控制效果和鲁棒 性;算法原理简明,参数的物理意义明确,理论分 析体系完整且应有技术成熟。
但常规PID控制也有许多不足之处,其中最突 出的一点就是无自适应能力,参数一旦整定完毕, 便固定地适用于一种工况,而大多数生产过程都比 较复杂,其被控对象往往具有非线性因素,或参数 特性发生变化,而PID对应这些因素和变化的适应 能力是比较差的;其次,PID控制快速性与超调量 之间的矛盾也限制了这种算法在高标准要求的系统 中的应用。
模糊PID控制既有模糊控制不依赖于被控对象 数学模型,对被控对象的非线性和时变性具有一定 适应能力等优点,又引入了PID控制稳态性好、无 静差的优点,可使控制系统同时获得良好的动态性 能与稳态性能,因此获得了广泛应用,取得了许多 的研究成果[4]。
模糊PID控制器有很多种,我们选取了其中的 参数自整定模糊PID控制器,在于其能在控制过程 中对不确定的条件、参数、延迟和干扰等因素进行 检测分析,采用模糊推理的方法实现PID 3个参数 Kp、Ki、Kd的在线自整定。该模糊PID控制器不仅 保持了常规PID控制系统的原理简单、使用方便、 鲁棒性强等特点,而且具有更大的灵活性、适应性 和精确性的优点,其控制系统结构如图3所示。模 糊PID控制系统包括1个模糊控制器和1个常规PID 控制器组成,偏差e作为模糊系统的输入,3个PID 参数Kp、Ki和Kd的变化值作为输出,根据事先确 定好的模糊控制规则作出模糊推理的参数校正,在 线改变PID参数的值,从而实现PID参数的自整定。 参数模糊自整定PID控制使被控对象有良好的动、 静态性能,而且计算量小。

|
图3 模糊PID控制器结构框图 |
PID参数自整定的实现思想是先找出PID 3个 参数与偏差e和偏差变化率ec之间的模糊关系,在 运行中通过不断检测e和ec,再根据模糊控制原理 对3个参数进行在线修改,以满足不同e和ec时 PID控制器参数的不同要求。
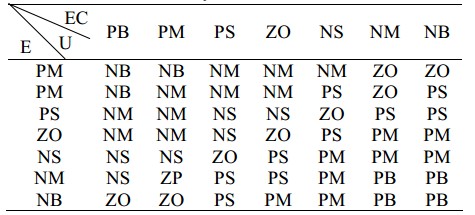
其基本算法如下:由E、EC及Kp、Ki和Kd的 模糊子集的隶属度,再根据各模糊子集的隶属度赋 值表和各参数的模糊调整规则模型,再设计出PID 参数模糊规则表,它是模糊PID参数整定的核心[5], 表1为Kp的模糊规则表,Ki、Kd的模糊规则表类似 于表1。
|
|
表1 Kp的模糊规则表 |
清汁加热器是一种管壳式换热器,管程走的物 料为清汁,经过加热后的清汁温度升高,壳程走的 物料为汁汽,汁汽经过换热之后降温冷凝为水,排 出至等压罐。假设清汁中糖分含量为18%,所用的 汁汽经过换热之后全部冷凝为水,清汁经过加热后 无汽化,则对于图4所示的管壳式清汁加热器,可 以建立以下数学模型:


|
图4 清汁加热器示意图 |
式中,q为加热器实际传热量(kJ/h),qm为最大
传热量(kJ/h),qm计算公式为:

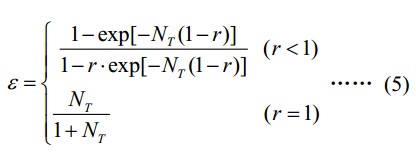
其中Cpt为管程物料平均热容(kJ/(kmol·K)),Cps为壳程物料平均热容(kJ/(kmol·K)),ft为管程物 料流速(kmol/h),fs为壳程物料流速(kmol/h),Tti为管程物料入口温度(K),Tsi为壳程物料入口温度(K),ε为传热效率因子。ε计算公式为:
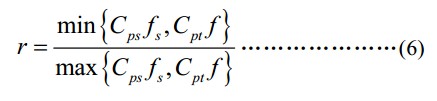
r为热容流率比,计算公式为:
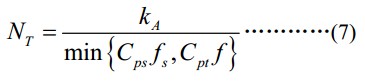
NT为传热单元数,计算公式为:
kA为传热系数与传热面积乘积,计算如下:
其中,k为传热速率-面积关联系数。 在传热量计算出来以后,计算清汁出口物料的 焓:

其中q为传热量,ho为清汁出口物料的焓,hi 为清汁入口物料的焓,焓的计算公式如下:

获得清汁出口物料的焓,即可通过公式10计算 清汁出口温度。
MATLAB是Math Works公司出品的商业数学 系统,是一个用于算法开发、数据可视化、数据分 析以及数值计算的高级技术计算语言和交互式环 境,它在数值计算方面首屈一指,代表着科学计算 的最高水平。MATLAB可以进行矩阵运算、绘制函 数和数据、实现算法、创建用户界面、连接其它编 程语言的程序等,主要应用于工程计算、控制设计、 信号处理与通讯、图像处理、信号检测、金融建模 设计与分析等领域。
本文中采用MATLAB来实现模糊PID控制算 法以及清汁加热器的建模仿真,并将模糊PID控制 算法应用于清汁加热器出口温度的控制,其控制对 象为汁汽流量。
设定汁汽温度为135℃,流量可控;汁汽冷凝 后的冷凝水温度为100℃;清汁流量为340 t/h,清 汁初始温度为85℃,清汁加热器出口温度设定为 115℃。在此基础上,系统的仿真结果如图5所示。 由图5可知,采用模糊PID控制器的清汁加热 器温度控制系统在30 s内即达到了设定值,30 s以 后一直维持在115℃,误差小于0.5℃,结果表明模 糊PID控制器的稳定性优越,且调节时间短,超调 量小,稳态误差小。
模糊PID控制器有机地组合了模糊控制算法和 PID控制算法,利用模糊控制算法的适用能力来提 升PID算法对被控对象参数变化适应性的性能,利 用模糊推理实现PID 3个参数Kp、Ki、Kd的在线自 整定。
依据糖厂清汁加热器的工艺条件搭建了清汁加 热器的严格机理模型,并在MATLAB环境下实现了 模糊PID算法和清汁加热器模型,将模糊PID算法 用于清汁加热器清汁出口温度控制,仿真结果表明 模糊PID控制器稳定性优越,调节时间短,超调量 小,有应对系统变化的适应能力,控制精度高。模 糊PID控制器用于清汁加热器温度控制将提升其稳定性和控制精度,有利于糖厂维持工艺稳定、提升 产品质量、提高经济效益。
| [1] | 齐琳. 模糊PID动态切换控制算法的研究[D]. 北京: 北京交通大学,2008. ( 1) 1)
|
| [2] | 王磊. 模糊控制理论及应用[M]. 北京:国防工业出版社,1997. (1)
|
| [3] | 路桂明. 基于模糊PID控制的电锅炉温度控制系统的研究[D]. 哈尔滨:哈尔滨理工大学,2007. (2)
|
| [4] | 柳洪义,马现刚,朱树森. 微波催化连续反应实验系统的温度控制[J]. 东北大学学报:自然科学版,2003,24(3):256-259. (1)
|
| [5] | 邱志雄. 模糊PID控制器[J]. 电气自动化,1994(4):3-7. (1)
|