 2016, Vol. 31
2016, Vol. 31



2. 首都师范大学三维信息获取与应用教育部重点实验室, 北京 100048
3. 河南工程学院 土木工程学院, 郑州 451191
2. The Key Laboratory of
3. D Information Acquisition and Application, Ministry of Education, Capital Normal University, Beijing 100048, China 3. College of Civil Engineering, Henan Institute of Engineering, Zhengzhou 451159, China
探地雷达是依据反射波的时频和振幅特征来确定介质结构和物性特征的近地表地球物理探测技术,已被广泛应用于考古、地质勘探、无损检测等诸多领域,并取得了较好的应用效果(李嘉等,2007; 李华等,2010; 栗毅等,2011; Jol,2011; 刘澜波和钱荣毅,2015).探地雷达图像解译主要是根据反射波的时频和振幅特征来定性或定量分析目标物的异常形态,探测效果与介质之间电性差异及介质分布密切相关,加之数据采集过程中周围电磁环境的干扰,使探地雷达图像的解译存在一定难度,目前主要依靠人工判读(杨峰和彭苏萍,2006; 曾昭发等,2010).相对传统测绘技术,地面三维激光测量技术以非接触的测量方式实现了从传统单点到连续、快速的面测量的直接转变,可深入复杂、危险环境中实现对各种不规则实体或空间的三维重构,为高效地进行三维建模和虚拟重现提供了新的技术手段(李清泉等,2000; 张会霞和朱文博,2012;袁小祥等,2012; 任治坤等,2014).虽然地面激光能快速获取被测物体外部几何形态或者三维场景,但无法穿透物体实现对其内部结构的测量.考虑到地面激光和探地雷达各自技术的优缺点,若两种技术相互结合应用,可优势互补,在获取物体外部几何形态或三维场景的同时,也实现了对物体内部或浅地表下空间分布的探测.因此,国内外的学者开始对地面激光和探地雷达相互结合应用进行研究,主要集中在考古、桥梁结构与病害检测、道路检测和地质勘探等领域,并取得一定的研究成果(Zhang,2009; Saarenketo et al.,2013; Tarussov et al.,2013; Kamp et al.,2014).
本文通过国内外大量最新文献资料调研,重点从地面激光实现探地雷达图像地形校正、地面激光辅助探地雷达图像正演模拟、数据融合及相互解译三个方面介绍了两种技术相互结合应用的研究现状,并探讨其中存在的问题及发展方向,为以后两种技术的相互结合应用提供参考.
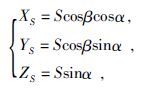
1 基本原理 1.1 地面三维激光扫描仪地面三维激光扫描仪主要由激光测距系统、旋转平台、软件控制平台及电源等其他附件设备组成.工作时,电子装置发射的脉冲信号,经过高速旋转的棱镜,到达物体表面并发生反射,其反射回来的信号被接收器接收并记录下来,通过数据转换生成不同数据格式的点云.大多数型号的激光扫描仪都具有内置或外置高分辨率相机,扫描过程中可同步获取空间的彩色纹理,通过点云和照片之间的融合处理可生成真彩色三维点云(张剑清等,2007; 张毅,2008; 李健等,2014).基于脉冲测距原理的三维激光点坐标的计算方法,如图 1.其中S 为激光中心到物体表面的测距观测值,α和β分别为每个激光脉冲的横向角度观测值和纵向角度观测值,由此可得点P坐标的计算公式为
|
(1) |

|
图 1 脉冲式地面激光扫描仪测量原理图 Figure 1 The working principle schematic of the impulse terrestrial laser scanner |
探地雷达系统主要由中心控制单元、发射天线和接收天线三部分组成.系统工作时,中心控制单元通过信号控制发射天线发射高频脉冲的电磁波,电磁波传播过程中遇到电性差异(介电常数、导电率等)较大的目标体或介质界面时,就会发生反射和透射.反射的电磁波能量被地面上的接收天线接收,通过光纤传输到主机控制单元,经重采样、整形和放大等信号处理后,由主机控制单元记录下并将时间剖面图显示出来.另一部分能量则透过界面继续向下传播,在遇到更深处的目标体或界面处发生反射.原始数据经过后期处理后,根据时间剖面图上反射波的时频和振幅特征来定性或定量判断地下目标物深度、形态和位置等参数,从而实现对地下目标体或介质界面的有效探测(图 2).

|
图 2 探地雷达工作原理示意图 Figure 2 The working principle schematic of ground penetrating radar |
地面激光扫描仪获取的数据是一系列具有一定拓扑结构关系的三维空间数据点的集合,即点云.数据严格按照矩阵的形式逐行逐列储存,行列值依扫描精度而定,数据采集之前根据不同采集对象和精度要求设置采集参数(张剑清等,2003;杨俊志等,2012).原始点云主要包括两个角度信息和一个距离信息即激光中心到目标体表面的距离、角度和反射强度.经过与高分辨率照片、GPS(Global Position System)数据融合后最终可生成带绝对地理位置的三维真彩色点云.
探地雷达的数据形式与其数据采集方式密切相关,主要有A-scan、B-scan和C-scan三种扫描方式(孙伟,2012),如图 3,图中表示天线在xoy平面内沿x轴方向水平移动,电磁波沿z轴向下传播的三种不同扫描方式,其中以B-scan和C-scan这两种扫描方式最为常用.当以A-scan方式扫描时,数据记录的是任意空间位置的单道波数据,主要包括电磁波在介质中传播时遇到异常后反射波的瞬时振幅、瞬时频率、瞬时相位和双程传播时间,单道波数据是探地雷达数据最基本的组成形式.当以B-scan方式扫描时,数据形式是连续单道波组成的二维时间剖面,水平方向代表探地雷达天线沿水平方向相对初始位置移动的距离,竖直方向表示电磁波在地下介质中传播的双程时间.当以C-scan方式扫描时,数据记录的是一组等间距的二维剖面,经过后期插值处理可得到局部三维空间数据.

|
图 3 探地雷达扫描方式示意图 Figure 3 Illustration of GPR scanning mode |
地面激光主要通过离散点云的形式将真三维场景表现出来,探地雷达则是通过二维剖面图上的电磁波的时频和振幅特征来实现对异常体或地下空间形态的有效探测.根据两传感器各自技术优势和数据特点,其相互结合应用优势明显,具体可从以下三个方面表现出来.首先,从数据空间特点角度,地面激光提供了探地雷达无法获取的地面上可量测高精度的三维场景数据,而探地雷达则解决了地面激光无法穿透地面的问题,两种技术相互结合,不仅可以获取地面上的真三维空间信息,同时也实现了对浅地表层空间形态的有效探测.其次,由于地下空间构造比较复杂、介质分布不均匀,加之探地雷达数据采集过程中易受地面环境等因素干扰,使探地雷达图像上电磁波干扰较大,不利于有效异常信息的识别和提取.地面激光和探地雷达的相互结合,利用点云数据最大程度上排除地面干扰物等外界因素对于雷达图像的干扰,通过地物特征的分析来辅助雷达图像解译,从而提高探地雷达图像解译的准确性.最后,根据两种传感器数据采集特点和数据形式,通过数据转换实现地面激光和探地雷达数据的地上地下一体化显示,可将地下异常分布更形象、直观地展现出来,更进一步促进两者数据之间的互补解译.
3 地面激光与探地雷达相互结合应用研究现状通过分析国内外相关资料,地面激光和探地雷达相互结合应用主要体现在两个方面:一是利用地面激光获取的高精度点云或者影像,通过地物属性分析来辅助探地雷达图像解译.二是点云与探地雷达数据融合显示,将地物属性和与之对应的地下空间形态更形象、直观的表现出来.
不论软硬件设备,还是应用研究,地面激光都比探地雷达技术发展的相对成熟.地面激光在提供精确的几何结构的同时,可通过高分辨的内置或外置相机获取的纹理信息将真彩色的三维场景展现出来.而探地雷达则是以二维时间剖面的形式将地下结构展示出来,不仅探测精度不高,而且针对不同异常类型,反射波的时频和振幅特征在图像上的表现形式也不相同.因此,地面激光与探地雷达相互结合应用主要是利用地面激光获取的高精度数据来辅助探地雷达图像的解译,具体表现在地面激光实现探地雷达图像的地形校正、地面激光辅助探地雷达图像的正演模拟和数据融合解译三个方面.
3.1 地面激光实现探地雷达图像地形校正当探地雷达天线在地形比较平坦的条件下采集数据时,电磁波发射信号的时间起始点和地面与天线的结合面在同一平面上,采集图像是以水平零线作为起始线的剖面图,可以将地下构造的真实形态反映出来.但在实际应用中,地形经常是起伏变化的,探地雷达每道数据的时间起始点会随着地形的变化而变化,导致地下目标成像的形状和位置也发生改变,而探地雷达图像仍是以水平零线作为起始线的形式显示,从而影响了图像的解译和目标体的精确定位.因此,探地雷达在地形起伏条件下采集数据时,需做地形校正处理(Yilmaz,1987;周辉等,2004).
地形校正过程,实质是探地雷达图像与地形数据精确匹配的过程.因此,精确的地形数据是实现探地雷达图像地形校正的关键.一般地,地形数据可通过激光测距仪(Jol et al.,2004)、全站仪(Heincke et al.,2002)、RTK-GPS(Urbani and Baskaradas,2010; Böniger and Tronicke,2010)、倾角仪与里程计(Prokhorenko et al.,2012)等传统测量方式获取,但以上采集方式不同程度上都存在采集速度慢、效率低和作业范围小等缺点.基于地面激光可以高效、快速获取大范围内高分辨率的地形数据的优点,国内外学者已经开始开展利用地面激光获取的地形数据来实现探地雷达图像地形校正的研究,随着近几年的不断发展,逐渐形成了利用地面激光实现探地雷达图像地形校正的方法,并且处于不断的改进完善中.
Vsemirnova等在地面激光和探地雷达确定泥炭层厚度的研究中,通过安装GPS的Riegl LMS-Z40i型地面激光获取的实验区高精度地形数据实现了探地雷达图像的地形校正,使地形起伏变化在探地雷达图像上显示出来,从而精确地确定出泥炭层的深度分布,并绘制了相应的厚度变化图像(Vsemirnova et al.,2013).
Teresa等提出利用高精度的三维点云构建DEM(Digital Elevation Model)的方法快速实现区域内探地雷达图像的地形校正(Teixidó et al.,2014).为将探地雷达图像三维探测效果真实地反映出来,地面激光获取高精度地形数据的基础上,采用全站仪精确记录测线开始和结束位置的方式实现了探地雷达图像与地形数据之间的精确匹配.最后通过地形校正前和地形校正后三维图像的效果对比,表明此方法实现探地雷达三维图像地形校正的适用性和有效性,如图 4.

|
图 4 基于三维激光点云的探地雷达图像地形校正效果(Teixidó et al.,2014) Figure 4 The radargram of topographic correction by 3D-laser scanner data(Teixidó et al.,2014) |
Zhang等在数据采集之前,沿探地雷达测线均匀布置激光反光标志,然后利用激光扫描仪获取精确地形数据.当探地雷达天线中心与测线上标志点中心重合时,在雷达图像上记录此时的水平位置.最后从彩色点云上提取出标志点的精确高程,结合采集道间距采用线性插值的方法实现探地雷达图像的地形校正(Zhang et al,. 2014).
Bubeck等在地面激光和探地雷达探测正断层的研究中,根据探地雷达采集的道间距,在激光点云上提取与之对应的二维地形剖面,通过后期地形数据匹配实现探地雷达图像的地形校正,这种方法提取出地形的分辨率可以达到0.1~0.5 m(Bubek et al.,2015).
Zhao等为保证探地雷达图像属性分析效果,针对多个二维剖面形成探地雷达三维图像可视化的过程中,在地面激光获取高精度点云构建高精度的DEM的基础上,采用提取出各道测线的地形数据来实现探地雷达图像的地形校正,从而将地形起伏下真实的地下构造在探地雷达图像上显示出来,保证了后期属性分析的效果(Zhao et al.,2015).
张迪结合地面激光与探地雷达探测理塘活动断裂研究,利用地面激光获取高分辨率的地形数据构建出不同分辨率的DEM,并借助高反射率的靶球在点云上标定出探地雷达测线的初始和结束位置,进而在点云上精确提取地形剖面实现了探地雷达图像的地形校正,如图 5所示(张迪,2015).最后与差分GPS实现探地雷达图像地形校正的效果进行了对比,结果显示在保证数据处理效率的情况下,当DEM的分辨率与探地雷达数据采集道间距相一致时,探地雷达地形校正的效果最佳.

|
图 5 地面激光实现探地雷达图像地形校正效果(张迪,2015) Figure 5 GPR profiles of topographic correction based on Terrestrial laser scanner(Zhang,2015) |
以上利用地面激光实现探地雷达图像地形校正方法虽然各不相同,但其实现思路却基本相同,即从激光点云上提取出探地雷达测线的地形数据,并与探地雷达图像进行精确匹配.地面激光实现探地雷达图像的地形校正应用的初步阶段,多采用从点云上直接提取测线地形数据,由于点云密度呈不规则分布,密度会随距离的增加呈不规则变化,使地形剖面与探地雷达图像的道数据之间无法进行精确匹配,影响后期地形校正效果.综合考虑数据处理效率和数据之间的精确匹配,目前多采用在构建DEM的基础上提取出地形数据的方法实现探地雷达图像的地形校正.一方面,DEM是高精度的二维曲面,在二维曲面上可以截取任意位置、任意角度的二维剖面.另一方面,DEM为统一采样后的格网数据,点与点之间的距离是固定不变的,便于后期探地雷达数据与地形数据之间的匹配,同时也可以根据地形校正的精度选择不同分辨率的DEM,以得到不同分辨率的地形数据.
3.2 地面激光辅助探地雷达图像正演模拟探地雷达数据采集过程中,由于电磁波能量衰减和外界因素干扰,使探地雷达图像上的电磁波特征比较复杂,并伴有信号振铃、多次散射波和电磁波绕射等噪声,很大程度上影响了雷达图像的解译.为了减少外界环境因素对电磁波的干扰,准确识别和提取目标体的电磁波反射特征,数值分析方法被广泛应用于探地雷达图像的解译(方广有等,1998; 傅磊等,2014; 吴俊军等,2014).数值分析方法较多,但以时间域有限差分法应用最为广泛,其基本原理是在建立精确数值模型基础上,利用计算机以离散差分的形式在时间和空间上实现电磁波在地下介质中传播路径的模拟(Giannopoulos,2005; 冯德山等,2006; Warren and Giannopoulos,2011).因此,要实现探地雷达图像的正演模拟,获取精确的数值几何模型是关键.
利用地面激光获取精确数值几何模型来辅助探地雷达图像正演模拟的方法最早由Mercedes(Solla et al.,2011,2012a,b)等在古桥保护的研究中提出的.具体做法是利用地面激光扫描仪快速获取古桥桥体外部几何形态并构建三维模型,通过三维模型提取的正射影像绘制出桥体精确的几何结构,以此建立正演模型并通过时间域有限差分法进行模拟.数据解译之前,通过正演模拟后的图像总结出不同目标体的电磁波响应特征,从而为实测探地雷达图像上异常体的识别和判定提供参考.
利用地面激光辅助探地雷达图像正演模拟的方法最初主要应用在古桥保护的研究中,随着地面激光与探地雷达相互结合技术的发展以及各领域应用的需求,此方法也逐渐扩展到土木工程、地质等其他领域.Mercedes等选择石块砌成的墙体作为研究对象,在地面激光获取墙体精细的三维几何模型的基础上,提取出正射影像建立其精细的数值几何模型(Solla et al.,2012),如图 6.利用正演模拟后的图像来辅助实测图像的解译,结果显示模拟后图像与实测图像上的电磁波反射特征基本一致,很大程度上减少了探地雷达图像解译过程中的不确定性.

|
图 6 地面激光数据提取的正射影像生成的数值模型(Solla et al.,2012) Figure 6 Numerical model from the orthophoto generated by laser scanner data(Solla et al.,2012) |
Mercedes等在道路介质填充属性未知的情况下,利用激光点云提取的地下通道的正射影像建立其数值模型,利用正演模拟的方法来辅助探地雷达实测图像的解译,并根据激光获取的地下通道精确几何外形结合实测的探地雷图像精确估算出电磁波在介质中的平均传播速度,取得较好的应用效果(Solla et al.,2015).
张迪结合地面激光与探地雷达探测理塘活动断裂德巫处的研究中,利用地面激光获取探槽剖面模型后,通过正射影像提取出探槽剖面的几何结构并建立其数值模型,如图 7,分别选择中心频率250 Mhz和500 Mhz的天线进行正演模拟,模拟后的图像与两种不同频率天线实测图像进行对比,总结出断裂在探地雷达图像上的雷达波响应特征,为该地区探地雷达探测断裂的图像解译提供参考(张迪,2015).

|
图 7 激光点云提取的正射影像生成探槽的正演模型(张迪,2015) Figure 7 Numerical model of trench section from the orthophoto obtained by laser scanner data(Zhang,2015) |
通过以上地面激光辅助探地雷达图像正演模拟研究现状分析,可以系统总结出地面激光辅助探地雷达图像正演模拟的方法,如图 8.地面激光获取的点云通过三角构网建立三维模型,并与内置或外置相机获取的高精度数字影像进行配准以形成真彩色三维模型;然后通过平面投影可以得到彩色正射影像,结合CAD绘图软件可实现精确外部几何结构提取;根据探地雷达获取的图像并结合精确的外部几何结构,计算出电磁波在不同介质层中的传播速度进而求出相应的介电常数(于景兰和王春和,2003),最后根据相应的参数建立其数值模型并进行正演模拟,通过正演模拟后的图像总结出不同异常体的电磁波响应特征来辅助实测图像的解译.文中地面激光辅助探地雷达图像正演模拟的方法存在一定的局限性,仅适用于地面激光可以获取到研究对象外部几何形态的情况,例如桥梁、地下通道、探槽等,对于地面下无法获取外部几何结构的情况,此方法将不再适用.

|
图 8 点云辅助探地雷达图像正演模拟的方法 Figure 8 The Forward modeling method of GPR images by point cloud(Solla et al.,2012) |
地面激光和探地雷达数据相互融合解译的应用研究,经历了从数据简单相互结合应用到一体化融合解译的发展阶段.最初应用阶段,主要是两传感器形式上的结合,即从地面激光和探地雷达各自获取的数据角度出发,对两传感器的数据进行对比分析来实现数据解译,其实现过程比较简单,数据效果不够直观、形象,后期数据分析的工作量较大,对解译者的要求较高.
Keumsuk等在地面激光和探地雷达揭示潮汐通道变化规律的研究中,利用地面激光获取露头沉积层的外部几何形态来实现探地雷达图像上沉积层的精确定位,进而计算出不同介质层的介电常数以确定出整个沉积层的介质分布状况,并推断出该地区潮汐通道的变化情况,验证了地面激光和探地雷达结合应用潮汐通道变化规律研究的可行性(Keumsuk et al.,2007).
Mark和Torres在各自硕士论文中将地面激光和探地雷达相互结合应用大型岩石的边坡稳定性分析.利用地面激光建立其岩石表面不连续平面模型,通过不连续平面的法向量角度变化分析将整个岩石表面的边坡稳定性表现出来.然后利用探地雷达对岩石内部的不稳定性进行半定量分析,并通过测线实现了地面激光和探地雷达的数据形式上的结合,从而从外部倾斜度和内部浅层两个不同角度对岩石的边坡稳定性进行了综合评价.最后与the Slope Stability Probability Classification(SSPC)Slope Stability Analysis 方法进行对比,验证了地面激光和探地雷达结合应用大型岩石边坡稳定性的适用性,取得了较好的应用效果(Pernito,2008; Torres,2008).
Lubowiecka采用地面激光、探地雷达和有限元模拟的方法来对石拱桥的稳定性进行研究.地面激光主要获取石拱桥复杂的外部几何结构,而探地雷达主要用来检测桥梁内部的异常结构,结合两种数据可以计算出桥体上各个部分的介电常数,进而为利用有限元模拟法对桥梁的稳定性的模拟提供数据参考,也为石拱桥梁稳定性研究提供了新的研究方法(Lubowiecka et al.,2009).
Thomson等利用地面激光确定地表冰川覆盖的范围后,结合探地雷达探测地表下冰川的厚度,实现对冰川融化、地貌演变等时空变化分析,结果表明利用激光获取地表冰川的覆盖范围与探地雷达获取地表下冰川的厚度之间存在一定的定量关系(Thomson et al.,2010).
Rauno等利用地面激光在沥青层铺设前后获得的厚度为标准,通过与探地雷达探测的沥青层厚度对比,结果显示探地雷达探测沥青层厚度整体效果较好,但探测精度仍需进一步提高(Heikkilä et al.,2010).
Moskal尝试将地面激光和探地雷达结合应用植物生物量分析研究,通过激光点云提取出的叶面积利用率实现了对地上部分生物量的估算,而地下部分生物量的估算主要是通过探地雷达探测植物根系的形状的方式实现,两技术相互结合应用,从地上和地下角度实现了对植物生物量的整体性研究,进一步提高了植物生物量估算的精度,并为植物的生物量研究提供了新的技术手段(Moskal and Kirsch,2012).
Higinio在地面激光和探地雷达相互结合应用刑事技术研究中,地面激光通过点云构建模型估算出埋葬体的体积和重量,而探地雷达主要根据图像上反射波异常推断刑事发生的地点以及分布范围(González-Jorge et al.,2012).
Ivan为验证利用激光扫描仪获取道路铺沥青前后厚度的方法有效性,利用高频率2.3GHz的探地雷达并结合钻孔取芯的方法获取的道路沥青层厚度为标准,对激光扫描仪获取的沥青层厚度进行检验,结果显示两者厚度的误差小于1.5 cm(Puente et al.,2013).
随着研究的不断深入,地面激光和探地雷达相互结合形式得到了更进一步的发展,借助外部传感器,通过后期数据处理可实现两者数据的配准融合,从而建立起地面激光和探地雷达数据一体化显示模型,将地面激光和探地雷达获取的地上和地下的空间信息更加形象、直观地表达出来,而且可以最大程度上促进了两者数据之间的相互解译.
Spahic在断层露头的探测中,利用探地雷达获取10道不同频率的二维剖面,借助DGPS实现探地雷达图像的精确定位(Spahic et al.,2010).为了提高探地雷达图像解译的准确性和重建断层露头的结构模型,通过数据编辑实现了地面激光和探地雷达数据在地质软件Gocad中的融合显示,构建了断层露头的三维模型,进而可以计算出断层的一些参数例如倾角、位错量等.
Wilkinson结合地面激光和探地雷达探测正断层的研究中,通过将探地雷达数据转换为点云实现了地上地下一体化显示,使断层地表地貌与浅地表下空间分布有机地关联起来,可以直观判断出断层的几何产状、走向,并可以精确计算出断层的位错,为断层空间分布研究提供一种强有力的技术手段(Wilkinson,2012).
Watters在文物遗产的保护研究中,通过后期的数据变换实现了地面激光彩色点云与探地雷达数据的地上地下一体化显示,如图 7.通过一体化显示效果,可以直观、形象地确定地下异常的位置及形状分布(Watters and Wilkes,2013).
张迪结合地面激光与探地雷达探测理塘活动断裂禾尼处的研究中,设计时间同步的方式实现探地雷达与GPS数据同步采集,使探地雷达图像上的每道数据具有精确的地理位置信息.通过后期坐标转换、归一化处理实现了地面激光和探地雷达数据一体化显示,如图 10,并对地面激光和探地雷达数据的融合精度进行了验证,取得了较好的效果(张迪,2015).

|
图 9 激光点云和探地雷达数据的融合显示效果(Watters and Wilkes,2013) Figure 9 Data integration of point cloud and GPR images(Watters and Wilkes,2013) |

|
图 10 禾尼处断层地上地下一体化显示效果(张迪,2015) Figure 10 3D visualization of fault scarp in heni site using point cloud and GPR data(Zhang,2015) |
地面激光与探地雷达相互结合应用作为一种新兴的技术手段,但经过近几年的发展,已经得到不断的创新和发展.从目前两种技术发展的角度出发,地面激光和探地雷达相互结合应用主要集中在地面激光实现探地雷达图像的地形校正、地面激光辅助探地雷达图像的正演模拟和数据融合解译三个方面.相对于国外研究状况,国内对地面激光和探地雷达相互结合方法研究起步较晚,但近年来一些学者在不断吸收、消化国外学者最新研究成果的基础上,也开始探索地面激光与探地雷达技术相互结合的应用方法,并取得了一定的研究成果(Zhang,2009; 任丽丽等,2014; 张迪,2015).
纵观当前地面激光和探地雷达相互结合应用研究现状,其应用方法虽然已初步建立,并取得了一定的研究成果,但仍存在许多值得改进的方面,具有较大的发展前景和应用空间.未来几年地面激光和探地雷达相互结合应用研究和改进的方向主要集中在以下几个方面:
(1) 系统集成方面.目前地面激光和探地雷达仍为独立的数据采集系统,存在数据采集效率低和数据后处理工作量大等缺点,因此将激光、探地雷达和其他传感器集成为整体系统,真正意义上实现多传感器同平台的系统化同步采集、融合和分析是未来主要的研究方向.目前国外已经出现集成激光和探地雷达的车载一体化采集系统,国内的一些大学和研究机构如武汉大学、首都师范大学、中国矿业大学和中国电波传播研究所等也成功研制出车载激光扫描系统或车载式探地雷达系统,但仍没有出现两者相互结合的一体化采集系统,这方面仍需进一步深入研究.
(2) 结合应用方法.根据地面激光和探地雷达的数据特点,其结合方式主要集中在地面激光实现探地雷达图像的地形校正、地面激光辅助探地雷达图像的正演模拟和数据融合解译三个方面,随着技术的不断发展和应用的需求,地面激光和探地雷达的结合方式有待进一步的拓展.
(3) 激光点云与探地雷达数据融合的方式.目前激光点云与探地雷达数据的一体化融合方式主要是通过点的形式实现的,数据可视化形式比较单一,有待进一步提高.还需进一步研究与其他数据的融合方式,如栅格数据(DEM)、矢量数据及地下模型数据等不同类型数据的融合方法.
(4) 数据融合解译软件.目前国内外激光点云和探地雷达数据一体化显示主要是借助地质、测绘等专业软件,还未出现针对激光点云和探地雷达数据的可视化和融合解译的专业软件.
(5) 结合应用领域.地面激光和探地雷达相互结合最初应用在考古领域,随着技术不断发展,两种技术相互结合在道路检测、地质、冰川探测等领域也取得了较好的效果.目前国内地面激光和探地雷达技术相互结合主要分布在考古、地质和道路检测等少数领域,应用的领域需要进一步拓展.
5 结 论地面激光和探地雷达技术的相互结合应用作为一种新的技术手段,不论是两传感器相互结合方法,还是其结合应用的领域都得到了不断的发展.基于地面激光和探地雷达相互结合技术日益完善,文中分别详细地阐述了地面激光实现探地雷达图像的地形校正、地面激光辅助探地雷达图像的正演模拟和数据融合解译的研究进展,并指出了两数据相互结合应用的发展趋势.从总体的发展趋势上,地面激光和探地雷达结合相互应用仍处于初步阶段,在系统集成、结合应用方法、可视显示及数据融合方式等方面仍存在许多改进的地方,随着系统集成、数据采集方式、数据融合等技术的不断改进和应用需求的不断加强,地面激光和探地雷达相互结合应用将展示出更大的潜力,展示出较大的发展前景和应用空间.
致谢 感谢审稿专家对稿件提出的宝贵修改意见.| [] | Böniger U, Tronicke J .2010. On the potential of kinematic GPR surveying using a self-tracking total station:Evaluating system crosstalk and latency[J]. IEEE Transactions on Geoscience and Remote Sensing, 48 (10) : 3792–3798. DOI:10.1109/TGRS.2010.2048332 |
| [] | Bubek A, Wilknson M, Roberts G P, et al .2015. The tectonic geomorphology of bedrock scarps on active normal faults in the Italian Apennines mapped using combined ground penetrating radar and terrestrial laser scanning[J]. Geomorphology, 237 : 38–51. DOI:10.1016/j.geomorph.2014.03.011 |
| [] | Fang G Y, Zhang Z Z, Wang W B .1998. Numerical simulation of ground penetrating radar[J]. Journal of Microwaves (in Chinese), 14 (4) : 288–295. |
| [] | Feng D S, Dai Q W, He J S .2006. Finite difference time domain method of GPR forward simulation[J]. Progress in Geophysics (in Chinese), 21 (2) : 630–636. DOI:10.3969/j.issn.1004-2903.2006.02.046 |
| [] | Fu L, Liu S X, Liu L B, et al .2014. Airborne ground penetrating radar numerical simulation and reverse time migration[J]. Chinese Journal of Geophysics (in Chinese), 57 (5) : 1636–1646. DOI:10.6038/cig20140526 |
| [] | Giannopoulos A .2005. Modelling ground penetrating radar by GprMax[J]. Construction and Building Materials, 19 (10) : 755–762. DOI:10.1016/j.conbuildmat.2005.06.007 |
| [] | González-Jorge H, Solla M, Martínez-Sánchez J, et al .2012. Comparison between laser scanning, single-image rectification and ground-penetrating radar technologies in forensic science[J]. Measurement, 45 (5) : 836–843. DOI:10.1016/j.measurement.2012.02.013 |
| [] | Heikkilä R, Kivimäki T, Leppälä A, et al. 2010. 3D calibration of GPR (Ground Penetrating Radar) for bridge measurements-case Kajaani Varikko Bridge[C].//27th International Symposium on Automation and Robotics in Construction. Bratislava, Slovakia:IAARC. |
| [] | Heincke B, Spillmann T, Horstmeyer H, et al. 2002. 3-D georadar surveying in areas of moderate topographic relief[C].//Proceedings of PIE 4758, Ninth International Conference on Ground Penetrating Radar. Santa Barbara, CA:SPIE. |
| [] | Jol H M .2011. Ground penetrating radar:Theory and applications[M]. Amsterdam: Elsevier : 3 -10. |
| [] | Jol H M, Stock E, Peterson C, et al. 2004. Preliminary results from GPR stratigraphic studies on Fraser Island, Australia[C].//Proceedings of the Tenth International Conference on Ground Penetrating Radar. Delft:IEEE, 543-546. |
| [] | Kamp N, Russ S, Sass O, et al. 2014. A Fusion of GPR- and LiDAR-Data for Surveying and Visualisation of Archaeological Structures-a case example of an archaeological site in Strettweg, District of Murtal, Austria[C].//EGU General Assembly 2014. Geophysical Research Abstracts. Vienna, Austria:EGU. |
| [] | Keumsuk L, Mark T, Ambrose William A, et al .2007. Integration of GPR with stratigraphic and lidar data to investigate behind-the-outcrop 3D geometry of a tidal channel reservoir analog, upper Ferron Sandstone, Utah[J]. The Leading Edge, 26 (8) : 994–998. DOI:10.1190/1.2769555 |
| [] | Li H, Lu G Y, He X Q, et al .2010. The progress of the GPR and discussion on its future development[J]. Progress in Geophysics (in Chinese), 25 (4) : 1492–1502. DOI:10.3969/j.issn.1004-2903.2010.04.043 |
| [] | Li J, Guo C C, Wang F M, et al .2007. The summary of the surface ground penetrating radar applied in subsurface investigation[J]. Progress in Geophysics (in Chinese), 22 (2) : 629–637. DOI:10.3969/j.issn.1004-2903.2007.02.043 |
| [] | Li J, Wang Z M, Ma Y R, et al .2014. Automatic and Accurate Mosaicking of Point Clouds from Multi-station Laser Scanning[J]. Geomatics and Information Science of Wuhan University (in Chinese), 39 (9) : 1114–1120. |
| [] | Li L B, Qian R Y .2015. Ground penetrating radar:A critical tool in near-surface geophysics[J]. Chinese Journal of Geophysics (in Chinese), 58 (8) : 2606–2617. DOI:10.6038/cjg20150802 |
| [] | Li Q Q, Li B J, Chen J .2000. Research on laser range scanning and its application[J]. Journal of Wuhan Technical University of Surveying and Mapping (in Chinese), 25 (5) : 387–392. |
| [] | Li Y, Huang C L, Lei W T .2011. Ground Penetrating Radar:Theory and Applications (in Chinese)[M]. Beijing: Sciences Press . |
| [] | Lubowiecka I, Armesto J, Arias P, et al .2009. Historic bridge modelling using laser scanning, ground penetrating radar and finite element methods in the context of structural dynamics[J]. Engineering Structures, 31 (11) : 2667–2676. DOI:10.1016/j.engstruct.2009.06.018 |
| [] | Moskal L M, Kirsch J. 2012. Calibrating estimates of above- and below-ground forests biomass using remotely sensed metrics[EB/OL]. Seattle, WA:Remote Sensing and Geospatial Application Laboratory, University of Washington. http://www.sefs.washington.edu/research.pfc/pubs/fs/UW-RSGALFactsheet20.pdf |
| [] | Pernito M A E. 2008. Rock mass slope stability analysis based on 3D terrestrial laser scanning and ground penetrating radar[MSc. thesis]. Enschede, Netherlands:International Institute for Geo-Information Science and Earth Observation. |
| [] | Prokhorenko V, Ivashchuk V, Korsun S, et al. 2012. Topographic correction of GPR profile based on odometer and inclinometer data[C].//14th International Conference on Ground Penetrating Radar. Shanghai, China:IEEE, 425-429. |
| [] | Puente I, Solla M, González-Jorge H, et al .2013. Validation of mobile LiDAR surveying for measuring pavement layer thicknesses and volumes[J]. NDT & E International, 60 : 70–76. |
| [] | Ren L L, Li J C, Zhang D, et al .2014. Topographic correction of GPR profiles based on laser data[J]. Laser & Infrared (in Chinese), 44 (8) : 870–873. |
| [] | Ren Z K, Chen T, Zhang H P, et al .2014. LiDAR survey in active tectonics studies:An introduction and overview[J]. Acta Geologica Sinica (in Chinese), 88 (6) : 1196–1207. |
| [] | Saarenketo T, Matintupa A, Varin P. 2013. The use of ground penetrating radar, thermal camera and laser scanner technology in asphalt crack detection and diagnostics[C].//7th RILEM International Conference on Cracking in Pavements. Netherlands:Springer. |
| [] | Solla M, Lorenzo H, Novo A, et al .2011. Evaluation of ancient structures by GPR (ground penetrating radar):The arch bridges of Galicia (Spain)[J]. Scientific Research and Essays, 6 (8) : 1877–1884. |
| [] | Solla M, Lorenzo H, Novo A, et al .2012a. Structural analysis of the Roman Bibei bridge (Spain) based on GPR data and numerical modelling[J]. Automation in Construction, 22 : 334–339. DOI:10.1016/j.autcon.2011.09.010 |
| [] | Solla M, González-Jorge H, álvarez M X, et al .2012c. Application of non-destructive geomatic techniques and FDTD modeling to metrical analysis of stone blocks in a masonry wall[J]. Construction and Building Materials, 36 : 14–19. DOI:10.1016/j.conbuildmat.2012.04.134 |
| [] | Solla M, González-Jorge H, Sanchez P A, et al .2015. Non-destructive GPR evaluation of underpass arch-shape structures[J]. Gerontechnology, 11 (2) : 94. |
| [] | Solla M, Lorenzo H, Rial F I, et al .2012b. Ground-penetrating radar for the structural evaluation of masonry bridges:Results and interpretational tools[J]. Construction and Building Materials, 29 : 458–465. DOI:10.1016/j.conbuildmat.2011.10.001 |
| [] | Spahic D, Exner U, Behm M, et al .2010. Structural 3D modelling using GPR in unconsolidated Sediments (Vienna basin, Austria)[J]. Trabajos de Geología, Universidad de Oviedo, 29 : 250–252. |
| [] | Sun W. 2012. Research on detection data processing and visualization of underground pipeline (in Chinese)[Ph. D. thesis]. Zhengzhou:The PLA Information Engineering University. |
| [] | Tarussov A, Vandry M, De La Haza A .2013. Condition assessment of concrete structures using a new analysis method:Ground-penetrating radar computer-assisted visual interpretation[J]. Construction and Building Materials, 38 : 1246–1254. DOI:10.1016/j.conbuildmat.2012.05.026 |
| [] | Teixidó T, Peña J A, Fernández G, et al .2014. Ultradense topographic correction by 3d-laser scanning in pseudo-3d ground-penetrating radar data:Application to the constructive pattern of the monumental platform at the segeda I site (Spain)[J]. Archaeological Prospection, 21 (2) : 113–123. DOI:10.1002/arp.1464 |
| [] | Thomson L, Osinski G, Barfoot T D. 2010. Application of Lidar and GPR to terrestrial and martian periglacial and glacial geomorphology[C].//Proceedings of the Third European Conference on Permafrost (EUCOP). Svalbard, Norway:EUCOP. |
| [] | Torres C A. 2008. Geometric characterization of rock mass discontinuities using terrestrial laser scanner and ground penetrating radar[MSc. thesis]. Enschede, Netherlands:International Institute for Geo-information Science and Earth Observation. |
| [] | Urbani S, Baskaradas JA. 2010. GPR as an effective tool for safety and glacier characterization:Experiences and future development[C].//Proceedings of the 13th International Conference on Ground Penetrating Radar. Lecce:IEEE, 1-6. |
| [] | Vsemirnova E, Wilkinson M, Carle J, et al. 2013. Appraisal of peat thickness using combined GPR and terrestrial lidar survey[C].//European Geosciences Union General Assembly 2013. Vienna, Austria:European Geosciences Union. |
| [] | Warren C, Giannopoulos A .2011. Creating finite-difference time-domain models of commercial ground-penetrating radar antennas using Taguchi's optimization method[J]. Geophysics, 76 (2) . |
| [] | Watters M S, Wilkes S .2013. Integrating 3D surface and sub-surface data for heritage preservation and planning[J]. LiDAR Magazine, 3 (4) : 15. |
| [] | Wilkinson M. 2012. The use of Terrestrial Laser Scanning in characterizing active tectonic processes from postseismic slip to the long term growth of normal faults[Ph. D. thesis]. Durham:Durham University. |
| [] | Wu J J, Liu S X, Li Y P, et al .2014. Study of cross-hole radar tomography using full-waveform inversion[J]. Chinese Journal of Geophysics (in Chinese), 57 (5) : 1623–1635. DOI:10.6038/cig20140525 |
| [] | Yang F, Peng S P .2006. The Detection Principle and Method of Geological Radar (in Chinese)[M]. Beijing: Sciences Press . |
| [] | Yang J Z, Yin J Z, Wu X L .2012. Measuring Principle and Calibration of Terrestrial Laser Scanner (in Chinese)[M]. Beijing: Surveying and Mapping Press. . |
| [] | Yilmaz O .1987. Seismic data processing[M]. USA: Society of Exploration Geophysicists . |
| [] | Yu J L, Wang C H .2003. Estimation of the EM wave velocity in detecting underground target by GPR[J]. Progress in Geophysics (in Chinese), 18 (3) : 477–480. DOI:10.3969/j.issn.1004-2903.2003.03.023 |
| [] | Yuan X Y, Wang X Q, Dou A X, et al .2012. Terrestrial Lidar-based 3D modeling analysis of surface rupture caused by Yushu Earthuake[J]. Seismology and Geology (in Chinese), 34 (1) : 39–46. |
| [] | Zeng Z F, Liu S X, Feng X .2010. Principle and Application of Ground Penetrating Radar (in Chinese)[M]. Beijing: Electronics Industry Press . |
| [] | Zhang D, Zhong R F, Li J C, et al. 2014. Topographic correction of GPR Profiles based on Laser data[C].//35th International Symposium on Remote Sensing of Environment. Beijing:IOP Publishing. |
| [] | Zhang D. 2015. The detection technology of the fracture dislocation based on the laser scanner and ground penetrating radar (in Chinese)[Ph. D. thesis]. Beijing:Capital Normal University,in press. |
| [] | Zhang J Q, Pan L, Wang S G, et al .2003. Photogrammetry (in Chinese)[M]. Wuhan: The Wuhan University Press . |
| [] | Zhang J Q, Zhai R F, Zheng S Y .2007. Automatic seamless registration of 3D multiple range view[J]. Geomatics and Information Science of Wuhan University (in Chinese), 32 (2) : 100–103. |
| [] | Zhang J S. 2009. Application of surveying and mapping new technology in historical building protection[C].//Proceedings of the 2009 3rd International Conference on Teaching and Computational Science (WTCS 2009). Shenzhen:WTCS, 801-805. |
| [] | Zhang Y. 2008. Research on point cloud processing of terrestrial laser scanning (in Chinese)[Ph. D. thesis]. Wuhan:Wuhan University. |
| [] | Zhao W K, Forte E, Levi S T, et al .2015. Improved high-resolution GPR imaging and characterization of prehistoric archaeological features by means of attribute analysis[J]. Journal of Archaeological Science, 54 : 77–85. DOI:10.1016/j.jas.2014.11.033 |
| [] | Zhou H, Wang Z L, Han B, et al .2004. Terrain correction and migration of GPR profile fulfilled simultaneously using reverse-time migration[J]. Journal of Jilin University (Earth Science Edition) (in Chinese), 34 (3) : 459–463. |
| [] | Zhu H X, Zhu W B .2012. Data Processing Theory and Application of 3D Laser Scanning Technology (in Chinese)[M]. Beijing: Machinery Industry Press . |
| [] | 方广有, 张忠治, 汪文秉.1998. 脉冲探地雷达的模拟计算[J]. 微波学报, 14 (4) : 288–295. |
| [] | 冯德山, 戴前伟, 何继善.2006. 探地雷达GPR正演模拟的时域有限差分实现[J]. 地球物理学进展, 21 (2) : 630–636. DOI:10.3969/j.issn.1004-2903.2006.02.046 |
| [] | 傅磊, 刘四新, 刘澜波, 等.2014. 机载探地雷达数值模拟及逆时偏移成像[J]. 地球物理学报, 57 (5) : 1636–1646. DOI:10.6038/cig20140526 |
| [] | 李华, 鲁光银, 何现启, 等.2010. 探地雷达的发展历程及其前景探讨[J]. 地球物理学进展, 25 (4) : 1492–1502. DOI:10.3969/jissn.1004-2903.2010.04.043 |
| [] | 李嘉, 郭成超, 王复明, 等.2007. 探地雷达应用概述[J]. 地球物理学进展, 22 (2) : 629–637. DOI:10.3969/j.issn.1004-2903.2007.02.043 |
| [] | 李健, 王宗敏, 马玉荣, 等.2014. 多站激光点云数据全自动高精度拼接方法研究[J]. 武汉大学学报·信息科学版, 39 (9) : 1114–1120. |
| [] | 李清泉, 李必军, 陈静.2000. 激光雷达测量技术及其应用研究[J]. 武汉测绘科技大学学报, 25 (5) : 387–392. |
| [] | 栗毅, 黄春琳, 雷文太.2011. 探地雷达理论与应用[M]. 北京: 科学出版社 . |
| [] | 刘澜波, 钱荣毅.2015. 探地雷达:浅表地球物理科学技术中的重要工具[J]. 地球物理学报, 58 (8) : 2606–2617. DOI:10.6038/cjg20150802 |
| [] | 任丽丽, 李家存, 张迪, 等.2014. 激光点云实现探地雷达图像地形校正的研究[J]. 激光与红外, 44 (8) : 870–873. |
| [] | 任治坤, 陈涛, 张会平, 等.2014. LiDAR 技术在活动构造研究中的应用[J]. 地质学报, 88 (6) : 1196–1207. |
| [] | 孙伟. 2012. 地下管线探测数据处理及可视化技术研究[博士论文]. 郑州:解放军信息工程大学. http://cn.bing.com/academic/profile?id=519a348020c900b1e9cc758bc1aa46e4&encoded=0&v=paper_preview&mkt=zh-cn |
| [] | 吴俊军, 刘四新, 李彦鹏, 等.2014. 跨孔雷达全波形反演成像方法的研究[J]. 地球物理学报, 57 (5) : 1623–1635. DOI:10.6038/cig20140525 |
| [] | 杨峰, 彭苏萍.2006. 地质雷达探测原理与方法研究[M]. 北京: 科学出版社 . |
| [] | 杨俊志, 尹建忠, 吴星亮.2012. 地面激光扫描仪的测量原理及其检定[M]. 北京: 测绘出版社 . |
| [] | 于景兰, 王春和.2003. 探地雷达探测地下目标时的波速估计[J]. 地球物理学进展, 18 (3) : 477–480. DOI:10.3969/j.issn.1004-2903.2003.03.023 |
| [] | 袁小祥, 王晓青, 窦爱霞, 等.2012. 基于地面LIDAR玉树地震地表破裂的三维建模分析[J]. 地震地质, 34 (1) : 39–46. |
| [] | 曾昭发, 刘四新, 冯晅.2010. 探地雷达原理与应用[M]. 北京: 电子工业出版社 . |
| [] | 张迪. 2015. 基于激光与探地雷达的断裂位错探测技术[博士论文]. 北京:首都师范大学,待出版. |
| [] | 张会霞, 朱文博.2012. 三维激光扫描数据处理理论及应用[M]. 北京: 电子工业出版社 . |
| [] | 张剑清, 潘励, 王树根, 等.2003. 摄影测量学[M]. 武汉: 武汉大学出版社 . |
| [] | 张剑清, 翟瑞芳, 郑顺义.2007. 激光扫描多三维视图的全自动无缝镶嵌[J]. 武汉大学学报·信息科学版, 32 (2) : 100–103. |
| [] | 张毅. 2008. 地面三维激光扫描点云数据处理方法研究[博士论文]. 武汉:武汉大学. |
| [] | 周辉, 王兆磊, 韩波, 等.2004. 同时实现地质雷达数据地形校正和偏移成像的方法[J]. 吉林大学学报(地球科学版), 34 (3) : 459–463. |