 2017, Vol. 60
2017, Vol. 60



2. 华中科技大学自动化学院, 武汉 430074;
3. 华中科技大学地球物理研究所, 武汉 430074
2. School of Automation, Huazhong University of Science and Technology, Wuhan 430074, China;
3. Institute of Geophysics, Huazhong University of Science and Technology, Wuhan 430074, China
高精度静电悬浮加速度计是重力卫星的核心载荷(Touboul et al., 1999, 2004, 2012),其功能是测量卫星所受的非保守力引起的加速度(Tapley et al., 2007).由于加速度计在卫星上的安装位置与卫星质心位置之间不可避免地存在一定偏差,卫星姿态旋转将引入离心加速度.加速度计自身无法区分卫星受到的非保守力和姿态旋转引入的扰动加速度,为使测量输出主要反映非保守力,必须保证加速度计检验质量与卫星质心的相对位置控制在一定的范围内,从而使旋转引入的扰动加速度不影响到非保守力测量精度.卫星在轨期间,由于推进剂的消耗,卫星质心会相对于卫星框架发生变化,而加速度计和卫星框架之间是近似刚性连接,因此加速度计检验质量与卫星质心在轨实际位置会随时间发生变化,这就需要在卫星整个寿命周期内定期测量二者的质心位置偏差,并利用质心调节机构进行在轨调节,将二者偏差控制在一定范围内(Wang, 2003; Flury et al., 2008; Case et al., 2010).对于GRACE卫星而言,使用加速度计与星敏感器测量数据联合估计加速度计与卫星质心的位置偏差,然后通过移动已知质量块在轨调节卫星的质心,使之控制在所需范围内.GRACE卫星质心位置偏差控制要求为不超过0.1 mm,质心位置估计精度要求优于0.05 mm.Wang (2003)详述了GRACE的质心标定原理和过程,国内在此领域的研究主要集中在使用模拟数据进行标定算法的研究(郑伟等,2009;辛宁等,2013).
本文利用国内某试验卫星首次搭载的我国自主研制的静电悬浮加速度计的数据,对加速度计相对卫星质心位置的估计进行了研究.利用加速度计测量输入是偏离质心带来的旋转耦合加速度这一特性,结合加速度计数据以及卫星的姿态运动数据对加速度计测量值的正确性与精度进行了检验,同时利用上述数据对加速度计与卫星质心位置偏差进行了估计.本文首先简介静电悬浮加速度计的工作原理、在轨测量数据以及本次试验卫星搭载的加速度计基本配置,接下来描述卫星的姿态运动特征与测量数据的预处理流程,最后给出加速度计与卫星质心之间位置偏差的最小二乘法估计原理与估计结果,并对计算误差进行分析.
2 静电悬浮加速度计卫星搭载试验简介 2.1 加速度计工作原理高精度静电悬浮加速度计核心单元包含一块可自由运动的检验质量、包围检验质量的电容极板(检验质量、电容极板构成敏感探头)以及外围的电容传感与静电反馈控制电路(Josselin et al., 1999;白彦峥等,2010;Hu et al., 2014).静电悬浮加速度计由六路原理相同的传感、控制与反馈电路组成,同时测量同一个检验质量的三个平动加速度与三个角加速度.
2.2 加速度计测量输入加速度计主要测量值为三个平动自由度的加速度矢量ainSC,加速度计输出此矢量在加速度计坐标系三个方向的分量,其包含卫星平台所受的非保守加速度angSC以及平台姿态旋转附加加速度aRotSC, 公式为
|
(1) |
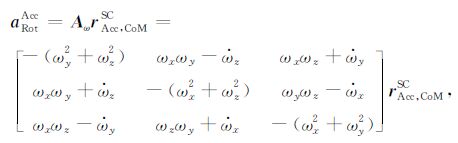
为明确各矢量意义,文中具有三个上下标的矢量的意义为:xa, bc表示a相对于b的x矢量在c坐标系中的表达.如ωSC, iSC为SC (航天器)相对于i (地心惯性坐标系,J2000坐标系)的角速度在SC (航天器)坐标系中的表达.旋转附加加速度aRotSC如(2)式所示,包含两项:第一项为切向附加加速度,与卫星的角加速度

|
(2) |
其中rAcc, CoMSC为在航天器(SC)坐标系中卫星平台质心指向加速度计检验质量质心处的位移矢量,这里约定加速度计坐标系与卫星本体坐标系三轴方向一致.两个坐标系的转换矩阵RSCAcc=I为单位对角阵,则有aRotAcc=RSCAccaRotSC=aRotSC,将(2)式展开写成矩阵形式为:
|
(3) |
其中

在有关部门资助下,华中科技大学自主研制的静电悬浮加速度计飞行样机于2013年搭载我国某试验卫星,首次进行了在轨飞行试验,成功验证了其在轨工作性能.加速度计检验质量质心距卫星质心的偏差在发射前的测量估算值rAcc, CoMSC约为{0.0025, 0.1200, -0.0064}m (精度约为1 mm).搭载的静电悬浮加速度计(高灵敏轴)量程设计约为10-3 m·s-2,分辨率在0.1 Hz为3×10-8 m·s-2/Hz1/2.根据该卫星轨道高度,卫星所受的主要非保守力是太阳光压,大气阻尼力可忽略.根据卫星的外形估算其所受的太阳光压量级|ang, solar| < 10-7m·s-2,而姿态机动过程带来的旋转加速度aRotSC远大于非保守力加速度,峰峰值可达10-5 m·s-2,因此可认为卫星姿态机动的过程中加速度计主要输入为卫星旋转带来的扰动加速度.
3 卫星姿态运动与数据处理 3.1 卫星姿态运动本次搭载试验卫星姿态控制系统的传感器包含星敏感器和陀螺仪,分别用于测量卫星相对于惯性坐标系的姿态角度qSCi和角速度ωSC, iSC.卫星姿态运动工作模式包括周期巡航与定点指向两种模式.周期巡航状态下卫星以轨道周期做姿态运动,定点指向模式指的是卫星在特定的时间内(一般持续数分钟)进行姿态机动,以实现对地定点指向,便于数据传输,一段时间之后再转回正常巡航模式.在此过程中卫星的角速度与角加速度呈现较大的变化,使得加速度计的测量值变化也比较大,为加速度计在轨质心估计提供很好机会.
3.2 姿态与加速度数据处理
加速度计原始数据(L0级数据)包含三个平动自由度和三个转动自由度的反馈电压信号,频率为4 Hz,本文只取三个平动自由度反馈电压Vfed=[Vx, Vy, Vz]来进行分析,使用公式aout=HaVfed(Ha为地面标定得到的反馈执行机灵敏度系数)转换后得到原始的加速度L1级数据.L1级数据经过野值剔除、偏值纠正、时间码修正、插值与降采样滤波后得到有效加速度信号,最终的处理结果为采样率1 Hz的三轴平动加速度信号.陀螺仪原始数据为0.5 Hz角速度信号,经时间码调整、插值、数值微分与滤波处理后得到与加速度计时间码严格对应的1 Hz的三轴角速度ωSC, iSC与角加速度信号
选取一次姿态机动时刻的陀螺仪数据并代入(3)式计算姿态旋转引起的加速度aRotSC,将其与同一时段的加速度计数据进行对比可得图 1,图中实线为根据陀螺角速度计算得到的加速度曲线,虚线为加速度计测量值,由图可见加速度计测量和陀螺仪估算加速度有较好的吻合,可直接验证加速度计在轨工作状态正常.图 1中Z轴的两条曲线吻合最好,X轴输入加速度上升下降时刻(图中70 s与110 s附近)出现小幅度抖动,主要是由加速度计测量到的卫星本体的高频结构振动,而陀螺仪受到测量频带及其内部的滤波器带宽限制,无法测量到这些高频振动.
4 加速度计质心位置估计 4.1 拟合原理
由2.2和2.3节可知,在卫星姿态机动过程中,加速度计测量变化主要来自于转动引入的加速度aAccSC=AωrAcc, CoMSC,其中Aω为ωSC, iSC与
|
(4) |
其中


|
图 1 卫星姿态机动时加速度计测量值(蓝色虚线)与姿态测量数据计算出的加速度(红色实线)对比 Fig. 1 Comparison of accelerometer measurement with acceleration derived by gyroscope during satellite attitude maneuver |
|
(5) |
(4)式的观测方程为L=ArAcc, CoMSC+ε,这里ε为观测噪声,则rAcc, CoMSC的最小二乘估计(沈云中和陶本藻, 2012)为
加速度计三个测量轴中Y、Z轴是高灵敏轴,其分辨率比X轴高,且Z轴方向姿态机动引入加速度明显大于Y轴的引入加速度.因此,可选择使用Z轴的加速度分量az进行质心估计,以获得更佳精度.根据3.1节所述的拟合方法,选取四个典型机动区间数据,每段时长约300 s,对加速度计距离质心位置进行了拟合,结果如表 1所示.表 1中的结果表明,四次拟合结果的标准差小于1 cm,其中Y方向标准差最小,约为0.36 cm.加速度计检验质量质心距卫星质心的坐标差在发射前估算值为rAcc, CoMSC={0.0025, 0.1200, -0.0064}m,其估算精度约为1 mm.拟合结果与模型估计值符合较好.四次拟合的曲线如图 2所示,其中虚线为加速度计测量,实线为陀螺仪数据拟合曲线.
|
|
表 1 机动拟合加速度计距离卫星质心的偏差值 Table 1 CoM calibration using Z axis acceleration during typical attitude maneuver |

|
图 2 Z轴加速度计测量值与陀螺仪数据拟合所得Z轴加速度比较 Fig. 2 Comparison of CoM calibration using Z axis acceleration during typical attitude maneuver |
使用最小二乘法同时估计卫星质心位置三个自由度坐标,各待估计参数互相耦合,无法给出误差传递的独立表达式.且当前数据中不仅包含仪器误差还包含平台的未知扰动,因此难以通过仪器精度评定质心拟合精度.对未来的重力卫星,为简化分析并给出质心测量精度的定性表达式,以分析rx的测量误差δrx为例,假设另两个参数ry、rz为已知固定值.由方程(4)可得:

|
(6) |
其中



|
(7) |
针对重力卫星质心估计,可设计专门的姿态机动方式以获取更好的估计效果.用于rx测量的运动模式设计为围绕Y轴做往复转动,转动角度与时间关系为θy(t)=θmsin (2πfCt),角速度ωy(t)=2πfCθmcos (2πfCt),角加速度


使用星载静电悬浮加速度计的测量数据和陀螺仪姿态数据比对表明,首次搭载的静电悬浮加速度计在卫星姿态机动时能够准确测得姿态机动引入的加速度.使用上述两项数据对加速度计与卫星质心的距离进行了标定,可获得mm级精度的初步结果,对未来重力卫星质心标定具有重要的参考意义.精度分析的结果表明,未来重力卫星在加速度计测量水平提高至1×10-10 m·s-2,以及使用精度达到2角秒的星敏感器的基础上,使用本文提供的方法进行质心标定,精度可达4.6×10-6 m,可满足重力卫星的需求,同时可以设计更好的姿态机动策略来提高质心估计的精度.
致谢感谢卫星用户及卫星研制方航天东方红卫星有限公司提供了有关数据.
| Bai Y Z, Tian W, Zhou Z B, et al. 2010. High-precision space-borne accelerometer and its applications. Chinese Journal of Space Science (in Chinese), 30(6): 601-606. | |
| Case K, Kruizinga G, Wu S. 2010. GRACE level 1B data product user handbook. JPL Publication D-22027. | |
| Flury J, Bettadpur S, Tapley B D. 2008. Precise accelerometry onboard the GRACE gravity field satellite mission. Advances in Space Research, 42(8): 1414-1423. DOI:10.1016/j.asr.2008.05.004 | |
| Hu M, Bai Y Z, Zhou Z B, et al. 2014. Resonant frequency detection and adjustment method for a capacitive transducer with differential transformer bridge. Review of Scientific Instruments, 85(5): 055001. DOI:10.1063/1.4873334 | |
| Josselin V, Touboul P, Kielbasa R. 1999. Capacitive detection scheme for space accelerometers applications. Sensors and Actuators A:Physical, 78(2-3): 92-98. DOI:10.1016/S0924-4247(99)00227-7 | |
| Milani A, Gronchi G. Theory of Orbit Determination.UK: Cambridge University Press, 2009. | |
| Shen Y Z, Tao B Z. 2012. Practical Methods for Surveying Data Processing. 2nd ed. (in Chinese). Beijing:Surveying and Mapping Press: 2-8. | |
| Tapley B D, Ries J C, Bettadpur S, et al. 2007. Neutral density measurements from the gravity recovery and climate experiment accelerometers. Journal of Spacecraft and Rockets, 44(6): 1220-1225. DOI:10.2514/1.28843 | |
| Touboul P, Foulon B, Christophe B, et al. 2012. CHAMP, GRACE, GOCE instruments and beyond.//Geodesy for Planet Earth. Berlin Heidelberg:Springer, 215-221. | |
| Touboul P, Foulon B, Rodrigues M, et al. 2004. In orbit nano-g measurements, lessons for future space missions. Aerospace Science and Technology, 8(5): 431-441. DOI:10.1016/j.ast.2004.01.006 | |
| Touboul P, Foulon B, Willemenot E. 1999. Electrostatic space accelerometers for present and future missions. Acta Astronautica, 45(10): 605-617. DOI:10.1016/S0094-5765(99)00132-0 | |
| Wang F R. 2003. Study on center of mass calibration and K-band ranging system calibration of the GRACE mission[Ph. D thesis]. Austin:University of Texas at Austin. | |
| Xin N, Qiu L D, Zhang L H, et al. 2013. Study on on-orbit calibration of center of mass for gravity satellite. Chinese Space Science and Technology (in Chinese), 33(4): 9-15. | |
| Zheng W, Xu H Z, Zhong M, et al. 2009. Influence of the adjusted accuracy of center of mass between GRACE satellite and SuperSTAR accelerometer on the accuracy of Earth's gravitational field. Chinese J. Geophys. (in Chinese), 52(6): 1465-1473. DOI:10.3969/j.issn.0001-5733.2009.06.007 | |
| Zhu Z, Zhang X M, Zhou Z B. 2010. In-orbit verification for accelerometers using rotating spacecraft method. Journal of Astronautics (in Chinese), 31(5): 1362-1367. | |
| 白彦峥, 田蔚, 周泽兵, 等. 2010. 高精度空间加速度计及其应用. 空间科学学报, 30(6): 601–606. | |
| 沈云中, 陶本藻. 实用测量数据处理方法(第二版).北京: 测绘出版社, 2012. | |
| 辛宁, 邱乐德, 张立华, 等. 2013. 一种重力卫星质心在轨标定算法. 中国空间科学技术, 33(4): 9–15. | |
| 郑伟, 许厚泽, 钟敏, 等. 2009. GRACE星体和SuperSTAR加速度计的质心调整精度对地球重力场精度的影响. 地球物理学报, 52(6): 1465–1473. DOI:10.3969/j.issn.0001-5733.2009.06.007 | |
| 祝竺, 张晓敏, 周泽兵. 2010. 利用旋转卫星法开展加速度计在轨检验研究. 宇航学报, 31(5): 1362–1367. | |