 2017, Vol. 60
2017, Vol. 60



2. 防灾科技学院, 河北三河 065201;
3. 中国地震应急搜救中心, 北京 100049
2. Institute of Disaster Prevention, Sanhe Hebei 065201, China;
3. National Earthquake Response Support Service, Beijing 100049, China
地球重力场是表征地球系统特性的地球物理基本场,高精度绝对重力测量是监测地壳运动、地球内部物质迁移的重要手段之一,并在地震监测、海平面变化、国家基础测绘、地质环境与灾害监测、资源勘探和国防建设等领域具有广泛的应用(张善法等,2009;Vilibić,1997).
绝对重力仪是地球物理观测技术水平和能力的综合体现,已经成为国际上许多国家技术攻关的目标.迄今为止,虽然多个国家投入极大精力开展绝对重力仪的研制工作,包括法国的GA60型、德国的MPG型、意大利的IMGC型、俄罗斯的GABL型等绝对重力仪,但大多数仅停留在样机阶段,只有美国形成正式产品,包括FG5型和A10型绝对重力仪,并应用于火星探测、核潜艇导航、导弹制导和石油勘探等领域.我国是较早开展绝对重力仪研制的国家之一,目前中国计量院、清华大学、中国科学院测量与地球物理研究所、华中科大学以及中国地震局地球物理研究所等单位也正在开展该领域的相关技术的研发,并形成不同程度的样机(胡华等,2012;吴琼,2011).
下落法激光干涉绝对重力仪的设计是一个变型的迈克尔逊干涉仪,在测量过程中,落体在真空中做自由下落运动,落体光心相对于参考棱镜的光心(后简称参考点)位移变化四分之一激光波长时就会形成一条干涉条纹.通过对落体下落过程中记录的干涉条纹的处理,可以重构落体自由下落轨迹.然后基于最小二乘拟合,可以求出该测量地点的重力加速度值(Bich et al., 2008;Robertsson, 2007).
由此可知,为了保证获取的重力加速度值的精度,需要在落体下落过程中保持参考点的绝对静止或其运动呈线性.但是由于测点环境振动和落体控制系统工作时产生系统自振的影响,参考棱镜在落体自由下落过程中呈现复杂的振动模式,使得重构的落体自由下落轨迹不仅包含了落体相对于参考点的位移,也包含了参考点自身的振动信息,导致计算得到的重力加速度值叠加了振动误差,这种振动误差最大可达毫伽量级,严重影响了绝对重力测量数据的精度和准确度.同时这种振动误差会随着测点的不同而变化,从而导致后期无法通过振动补偿算法对测量结果进行误差修正(龙剑锋等,2012).
对于振动的处理,美国曾投入极大精力,研制出一种特殊设计的超长弹簧(自振周期30~60 s)的振动隔离装置,成功实现了参考棱镜与系统振动的有效隔离,使绝对重力仪的测量精度从原来的2~5 mGal提高至20~200 μGal(Microg Lacoste, 2014).在后续研究中,Micro-g公司花费近10年时间,重新设计了超长弹簧,其自振周期可以达到60 s,采用这种振动隔离装置的FG5型绝对重力仪最好测量精度可以达到2 μGal(Van Camp et al., 2003),是世界上实现振动处理的一个成功案例.该公司针对流动观测的需要,还设计了系统偏差为±10 μGal的A10型绝对重力仪,其参考棱镜振动隔离装置同样采用超长弹簧结构.但超长弹簧存在以下不足:结构和工艺复杂,技术难度高;体积偏大,不利于仪器的小型化;美国知识产权,对我国实行技术封锁,不利于我国的自主研发和产业化;该装置产品引进成本高,维修困难(吴书清,2012;Microg Lacoste,2014).
中国地震局地球物理研究所开展的绝对重力仪技术研究中,为了摆脱国外的技术限制,以及基于小型化发展思路,采用了振动补偿数据处理方法进行振动抑制处理,即通过同步测量落体下落时间位移坐标和参考棱镜的振动信号,通过对重构的落体下落轨迹进行振动补偿,降低振动引入的误差(吴琼等,2012),采用该方法在采用长周期垂直摆悬挂参考棱镜的情况下使最新构建的Age-110型绝对重力仪测量准确度优于15 μGal,测量精度优于10 μGal(滕云田等,2013;Zhang et al., 2015).
采用磁悬浮支承技术的磁悬浮隔振器,具有无接触、无磨损、无需润滑、寿命长、响应快等优点.以差动式磁悬浮主动隔振器为例,与传统的隔振系统相比,基于这种主动式磁悬浮隔振原理的隔振系统对低频干扰隔振效果提高了2~3 dB,对谐振频率下的干扰提高了8~10 dB,实际试验结果表明,这种磁悬浮隔振系统在低频段有良好的隔振效果,尤其在谐振区附近,隔振效果更为明显,提高了6~8 dB(宋春生等,2010).
针对上述问题,在同行研究的基础上,本文将在低频段具有良好隔振效果的磁悬浮隔振技术引入到参考棱镜的振动隔离中(段小帅,2010),设计反馈式磁悬浮两级振动隔离系统,针对目前比较成熟的四种反馈方式(匙庆磊,2014)分别进行仿真分析,解决该两级隔振系统中反馈方式的选定问题,为绝对重力仪设计中隔振系统的机构设计提供理论基础.
2 隔振系统的模型设计与数学模型提取基于磁悬浮原理设计的反馈式两级振动隔离系统的原理图如图 1所示.隔振系统外框利用弹性元件悬挂第一级隔振平台,该平台的下半部分缠绕反馈线圈悬浮于磁缸之中.弹性元件平衡掉第一级隔振平台的重力,降低反馈控制所需电流.第一级隔振平台上面放有永磁体,通过斥力将第二级隔振平台悬浮,第二级隔振平台为激光干涉绝对重力仪的参考棱镜,参考棱镜的振动信号通过反馈电路反馈到第一级隔振平台的反馈线圈(Li,2014;Richman, 1997).

|
图 1 隔振系统原理图 Fig. 1 Schematic diagram of vibration isolation system |
由上述原理图可提取出隔振系统的力学模型,如图 2所示,该模型是一个二自由度系统(Rinker III,1983;Vilibić,1997).图中,m1为第一级隔振平台的质量,k为悬挂弹簧的刚度,G1为反馈线圈机电耦合系数,m2为第二级隔振平台的质量,μ为永磁体磁性常数,y为外框相对于基础的位移,x1为第一级隔振平台相对于基础的位移,x2为参考棱镜相对于基础的位移,i为反馈线圈电流.由于参考棱镜的振幅处于微米量级,所以可以将非线性的永磁体斥力近似为线性的,并运用等效电流法将磁力线性化得出永磁体磁性常数μ(吴刚等,2004;Robertsson, 2007;Holterman, 2002.).

|
图 2 隔振系统的力学模型 Fig. 2 Mechanical model of vibration isolation system |
由图 2所示的力学模型可得隔振系统的动力学方程(杨学山,2001;Bich,2008):

|
(1) |
公式(1)中,外框相对于基础的位移y、第一级隔振平台相对于基础的位移x1和参考棱镜相对于基础的位移x2均为对时间t的时域函数.
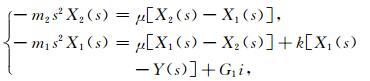
为了得到该系统的传递函数,对公式(1)进行拉普拉斯变换,将时函数y(t)、x2(t)、x1(t)变换为频域函数Y(s)、X2(s)、X1(s),可得
|
(2) |
将公式(2)两式联立可得
|
(3) |
公式(3)中的反馈线圈电流i在不同的反馈方式下其取值也不同,故需要根据不同的反馈方式来计算不同的传递函数.
3 不同反馈方式下隔振系统的仿真为了扩展频带、改善信噪比,需要在隔振系统上添加闭环反馈系统.不同的反馈方式会有不同的隔振效果,以下分别对棱镜隔振系统在相对速度反馈、绝对速度反馈、复合速度反馈和位移反馈下的隔振特性进行仿真分析(匙庆磊,2014;Hua, 2005),通过仿真以确定适合于本隔振系统的最优的反馈方式.
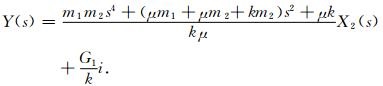
根据两级磁悬浮隔振器和参考棱镜机械设计的材料及实际尺寸,以及反馈电路中各参数的经验值(匙庆磊,2014;舒毓龙和孙耀东,1998),预设本两级磁悬浮隔振器的基本参数如下(各参数的具体物理意义将在后文不同反馈方式中进行详细阐述):
|
(4) |
参考棱镜相对速度反馈主要是采用相对速度计采集参考棱镜的相对速度,通过低通滤波及放大电路作为反馈线圈的反馈电信号,与磁缸激励线圈的电信号进行叠加,通过功率放大器对参考棱镜的运动产生阻碍作用.参考棱镜相对速度反馈的原理图如图 3所示.反馈网络的低通滤波用于滤除高频成分,由于是在低频段施加反馈,因此在反馈网络的作用频段内,相对速度反馈实际起到放大的作用.

|
图 3 相对速度反馈原理图 Fig. 3 Schematic diagram of relative velocity feedback |
设KA为功率放大器放大倍数、KB为反馈网络放大倍数、G2为相对速度计机电耦合系数、R为反馈线圈内阻、L为反馈线圈等效感抗,可得反馈线圈的电流为

|
(5) |
将(5)式代入(3)式,令α=μm1+μm2+km2,可得相对速度反馈方式下隔振系统的传递函数

|
(6) |
式中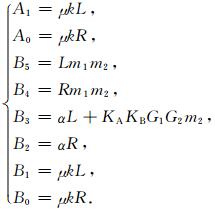
由式(4)计算可得A1=B1=814229.178、A0=B0=36477467.17、B5=0.0005、B4=0.0224、B3=994.009178、B2=36508.82717,可得棱镜相对速度反馈的帧频特性和相频特性曲线,如图 4所示.

|
图 4 相对速度反馈的幅频特性和相频特性 Fig. 4 Amplitude-frequency and phase-frequency characteristic of relative velocity feedback |
由仿真的频率特性表明该反馈方式下的隔振系统由于两级自由度耦合,导致在4.8 Hz附近出现共振峰,幅值放大10.5倍,224 Hz附近出现共振峰,幅值放大1.07倍,考虑是由于系统阻尼太小而反映的系统固有振荡特性,故此反馈方式不适合应用于本隔振系统中.
3.2 参考棱镜的绝对速度反馈参考棱镜绝对速度反馈是指采用零频响应加速度计采集参考棱镜的加速度值,通过积分器得到绝对速度值,经过隔直放大器作为反馈线圈的反馈电信号,与磁缸激励线圈的电信号进行叠加,通过功率放大器对参考棱镜的运动产生阻碍作用.参考棱镜绝对速度反馈的原理图如图 5所示.

|
图 5 绝对速度反馈原理图 Fig. 5 Schematic diagram of absolute velocity feedback |
设KC为隔直放大器的放大倍数、T1为隔直放大器时间常数、KD为积分器放大倍数、TD为积分器时间常数、Sa为加速度计灵敏度、KA为功率放大器放大倍数.
在绝对速度反馈的条件下,反馈线圈的电流为
|
(7) |
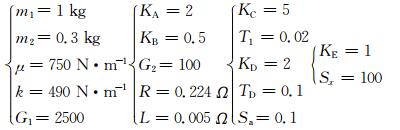
将(7)式代入(3)式,令
|
可得绝对速度反馈方式下隔振系统的传递函数

|
(8) |
式中
|
由式(4)计算可得A3=1628.458356、A2=170662.4357、A1=B1=5191525.239、A0=B0=36477467.17、B7=0.000001、B6=0.0005448、B5=1.633046356、B4=170.8315557、B3=-76496.78817、B2=207171.2629,可得棱镜绝对速度反馈的帧频特性和相频特性曲线,如图 6所示.

|
图 6 绝对速度反馈的帧频特性和相频特性 Fig. 6 Amplitude-frequency and phase-frequency characteristic of absolute velocity feedback |
由仿真的频率特性表明该反馈方式下的隔振系统上限截止频率在1.1 Hz附近,频带较宽,该系统能够通过较高频率的输入信号,系统跟踪信号的能力较强,响应速度快,调节时间短,在1.1 Hz以上频段隔振效果良好,故可应用于本隔振系统中.
3.3 参考棱镜复合速度反馈参考棱镜复合速度反馈是指将上述的绝对速度反馈信号和相对速度反馈信号通过一个加法器形成复合反馈信号,与磁缸激励线圈的电信号进行叠加,通过功率放大器对参考棱镜的运动产生阻碍作用.其原理图如图 7所示.

|
图 7 复合速度反馈原理图 Fig. 7 Schematic diagram of recombination velocity feedback |
在复合速度反馈的条件下,反馈线圈的电流为

|
(9) |
将(9)式代入(3)式,可得复合速度反馈方式下隔振系统的传递函数

|
(10) |
式中
|
由式(4)计算可得A3=1628.458356、A2=170662.4357、A1=B1=5191525.239、A0=B0=36477467.17、B7=0.000001、B6=0.0005448、B5=1.633046356、B4=171.1897157、B3=-76475.29857、B2=207350.3429,可得棱镜复合速度反馈的帧频特性和相频特性曲线,如图 8所示.

|
图 8 复合速度反馈的帧频特性和相频特性 Fig. 8 Amplitude-frequency and phase-frequency characteristic of recombination velocity feedback |
由仿真的频率特性表明该反馈方式下的隔振系统情况基本与绝对速度反馈一致,故可应用于本隔振系统中.
3.4 参考棱镜相对位移反馈参考棱镜相对位移反馈是指采用将参考棱镜的相对位移信号进行公式运算形成反馈线圈的反馈电信号,与磁缸激励线圈的电信号进行叠加,通过功率放大器对参考棱镜的运动产生阻碍作用.参考棱镜相对位移反馈原理图如图 9所示.

|
图 9 位移反馈原理图 Fig. 9 Schematic diagram of position feedback |
若KA为功率放大器放大倍数、KE为反馈网络放大倍数,Sx为位移计灵敏度,则振反馈线圈的电流为

|
(11) |
将(11)式代入(3)式,可得位移反馈方式下隔振系统的数学传递函数

|
(12) |
式中
由式(4)计算可得A1=B1=814229.178、A0=B0=36477467.17、B5=0.0005、B4=0.0224、B3=814.929178、B2=36866.98717,可得棱镜相对位移反馈的帧频特性和相频特性曲线,如图 10所示.

|
图 10 相对位移反馈的帧频特性和相频特性曲线 Fig. 10 Amplitude-frequency and phase-frequency characteristic of relative position feedback |
由仿真的频率特性表明该反馈方式下的隔振系统由于两级自由度耦合,导致在5 Hz附近出现共振峰,幅值放大217倍,203 Hz附近出现共振峰,幅值放大1.78倍,考虑也是由于系统阻尼太小而反映的系统固有振荡特性,故此反馈方式不适合应用于本隔振系统中.
4 参考棱镜的绝对速度反馈方式的隔振效果 4.1 隔振效果仿真由于参考棱镜的绝对速度反馈方式,低频段性能良好,频带较宽,故对该反馈方式在时域上隔振系统进行仿真分析,仿真时设计一个单频点地面振动信号,频率分别为1.1 Hz、10 Hz、100 Hz,振幅为1 μm,采样率为1000 Hz,该震动信号通过隔振系统后引起的第二悬浮质量体的振动x2的值,如图 11、12、13所示,图中第一个信号为地面振动信号,第二个信号为x2信号.

|
图 11 地面振动频率为1.1 Hz时的隔振效果 Fig. 11 The vibration isolation effect when the ground vibration frequency is 1.1 Hz |

|
图 12 地面振动频率为10 Hz时的隔振效果 Fig. 12 The vibration isolation effect when the ground vibration frequency is 10 Hz |

|
图 13 地面振动频率为100 Hz时的隔振效果 Fig. 13 The vibration isolation effect when the ground vibration frequency is 100 Hz |
在参考棱镜的绝对速度反馈方式下,由图 11、12、13可知,在1.1 Hz和10 Hz时,输出振幅减小为输入振幅的1/10,在100 Hz时,输出振幅减小为输入振幅的1/100,仿真结果表明,该系统对1.1 Hz以上的频率信号振幅具有明显的衰减效果,与图 6的结果一致.
4.2 与重力仪联合测试在甘肃平凉国家测绘局绝对重力常规测点,将绝对速度反馈方式下的参考棱镜隔振系统与中国地震局地球物理研究所自主研制的Age-110型激光干涉绝对重力仪进行联合测试.Age-110型激光干涉绝对重力仪的参考棱镜在无隔振系统的状态下(后文表述中,无隔振系统均指不采用本文设计的两级磁悬浮隔振系统下Age-110直接测量结果),测量40组,每组50个数据,测量结果如图 14所示.在无隔振系统的状态下,测量结果的单组测量精度小于50 μGal,整体测量精度为6.42 μGal.

|
图 14 无隔振系统状态下测量结果 Fig. 14 The measurement result without vibration isolation system |
Age-110型激光干涉绝对重力仪的参考棱镜在绝对速度反馈方式的隔振系统状态下,测量50组,每组50个数据,测量结果如图 15所示.在有隔振系统状态下,测量结果的单组测量精度小于20 μGal,整体测量精度为2.5 μGal.

|
图 15 有隔振系统状态下测量结果 Fig. 15 The measurement result with vibration isolation system |
对以上仿真结果和实际联合测试结果的分析表明:
(1) 隔振系统安装基础的环境振动激励与参考棱镜响应之间的关系与反馈方式有关.在参考棱镜的相对速度反馈方式和相对位移反馈方式下,由于两级自由度耦合的原因,都出现了共振峰,输入的4.8 Hz、5 Hz、203 Hz、224 Hz信号被放大,也就意味着环境振动噪声中特定频率或特定频段的信号被放大,造成隔振系统的震荡,因此不适合用于参考棱镜的隔振系统中;
(2) 参考棱镜的绝对速度反馈方式和复合速度反馈方式下的情况基本一致,从速度平坦段上限截止频率1.1 Hz以上起隔振作用,在10 Hz以上的高频段隔振效果非常好,可应用于参考棱镜的隔振系统中.由于绝对速度反馈方式相比于复合速度反馈方式设计起来相对简单,因此本隔振系统采用绝对速度反馈方式.
(3) 在参考棱镜的绝对速度反馈方式下,隔振效果的仿真结果显示,对1.1~10 Hz低频段隔振效果良好,大于10 Hz的高频隔振效果更佳,隔振效率可达到100 dB,完全可以满足绝对重力仪研发对参考棱镜隔振的要求.
(4) 根据绝对速度反馈方式下的参考棱镜隔振系统与中国地震局地球物理研究所自主研制的Age-110型激光干涉绝对重力仪进行联合测试的结果可知,该参考棱镜隔振系统将Age-110型激光干涉绝对重力仪的测量精度提高了1.5倍.
本文针对目前比较成熟的四种反馈方式在激光干涉绝对重力仪参考棱镜二级隔振系统中进行了仿真分析,解决了该两级隔振系统中反馈方式的选定问题,为隔振系统的整机设计提供了理论支撑.在此基础上,初步完成了隔振系统样机的设计,并与Age-110型激光干涉绝对重力仪进行联合测试.结果表明,该参考棱镜隔振系统可以有效提高激光干涉绝对重力仪的测量精度.
Bich W, D'Agostino G, Germak A, et al. 2008. Evaluating measurement uncertainty in absolute gravimetry: An application of the Monte Carlo method.//2008 IEEE International Workshop on Advanced Methods for Uncertainty Estimation in Measurement. Trento, Italy: IEEE, 67-71.
|
|
Chi Q L. 2014. A study of low-frequency standard vibration table systems and vibration calibration technology[Ph. D. thesis] (in Chinese). Harbin: Institute of Engineering Mechanics, China Earthquake Administration.
|
|
Duan X S. 2010. Dynamic modeling and self-converging control of electromagnetic suspension vibration isolator[Master's thesis] (in Chinese). Hefei: University of Science and Technology of China.
|
|
Holterman J. 2002. Vibration control of high-precision machines with active structural elements[Ph.D.thesis]. Enschede: University of Twente.
|
|
Hu H, Wu K, Shen L, et al.
2012. A new high precision absolute gravimeter. Acta Physica Sinica, 61(9): 099101.
DOI:10.7498/aps.61.099101 |
|
Hua W S. 2005. Low frequency vibration isolation and alignment system for advanced LIGO [Ph. D. thesis]. Palo Alto: Stanford University.
|
|
Li G, Hu H, Wu K, et al.
2014. Ultra-low frequency vertical vibration isolator based on LaCoste spring linkage. Review of Scientific Instruments, 85(10): 104502.
DOI:10.1063/1.4897488 |
|
Long J F, Huang D L, Teng Y T, et al.
2012. Study on vibration scribing algorithm for an absolute gravitational measurement. Acta Seismologica Sinica, 34(6): 865-872, 880.
|
|
Microg Lacoste. 2014. FG5-X features and specifications. http://www.microglacoste.com/fg5xspecs.php.
|
|
Richman S J. 1997. A multi-stage active vibration isolation system[Ph. D. thesis]. Boulder: University of Colorado at Boulder.
|
|
Rinker III R L. 1983. Super Spring—a new type of low-frequency vibration isolator[Ph. D. thesis] Boulde: University of Colorado at Boulde.
http://adsabs.harvard.edu/abs/1983PhDT........60R |
|
Robertsson L.
2007. On the diffraction correction in absolute gravimetry. Metrologia, 44(1): 35-39.
DOI:10.1088/0026-1394/44/1/005 |
|
Shu Y L, Sun Y D.
1998. Precise shaking table with low frequency and servo vibration isolation. Earthquake Engineering and Engineering Vibration, 18(4): 131-136.
|
|
Song C S, Hu Y F, Zhou Z D.
2010. Control mechanism of a differential magnetic suspension active vibration isolation system. Journal of Vibration and Shock, 29(7): 24-27, 104.
|
|
Teng Y T, Wu Q, Guo Y G, et al.
2013. New type of high-precision absolute gravimeter base on laser interference. Progress in Geophysics, 28(4): 2141-2147.
DOI:10.6038/pg20130459 |
|
Vilibić I.
1997. Global sea level rise-new techniques for the absolute sea level measurement. Geofizika, 14(1): 119-131.
|
|
Wu G, Zhang Y L, Liu K, et al.
2004. Two kinds of linearization method for magnetic force of permanent electromagnetic bearing. Journal of Machine Design, 21(3): 12-14.
|
|
Wu Q. 2011. The study of the key technology in high-precision absolute gravimeter[Ph. D. thesis] (in Chinese). Beijing: Institute of Geophysics, China Earthquake Administration.
|
|
Wu Q, Hao X G, Teng Y T, et al.
2012. Influence mode analysis of Self vibration on absolute gravimeter. Geomatics and Information Science of Wuhan University, 37(8): 980-983.
|
|
Wu S Q. 2012. The research and application of absolute gravimeter based on free-fall theory [Master's thesis] (in Chinese). Beijing: National Institute of Metrology.
|
|
Yang X S. 2001.
Engineering Vibration Measuring Iinstruments and Testing Techniques. Beijing: China Zhijian Publishing House.
|
|
Zhang B, Teng Y T, Xing L L, et al.
2015. The vibration isolation technologies of load in aviation and navigation. International Journal of Multimedia and Ubiquitous Engineering, 10(12): 19-26.
DOI:10.14257/ijmue |
|
Zhang S F, Meng L S, Du X J, et al.
2009. Study on the application of high precision gravity survey in detecting mined-out areas of gold mines. Progress in Geophysics, 24(2): 590-595.
DOI:10.3969/j.issn.1004-2903.2009.02.029 |
|
匙庆磊. 2014. 低频标准振动台系统和振动校准技术研究[博士论文]. 哈尔滨: 中国地震局工程力学研究所.
http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gjzt201504010&dbname=CJFD&dbcode=CJFQ |
|
段小帅. 2010. 磁悬浮隔振器的动态建模与自收敛控制[硕士论文]. 合肥: 中国科学技术大学.
http://cdmd.cnki.com.cn/Article/CDMD-10358-2010210699.htm |
|
胡华, 伍康, 申磊, 等.
2012. 新型高精度绝对重力仪. 物理学报, 61(9): 099101.
DOI:10.7498/aps.61.099101 |
|
龙剑锋, 黄大伦, 滕云田, 等.
2012. 绝对重力仪测量结果的振动划线处理方法初步研究. 地震学报, 34(6): 865–872, 880.
|
|
舒毓龙, 孙耀东.
1998. 高精度低频振动台及伺服隔振. 地震工程与工程振动, 18(4): 131–136.
|
|
宋春生, 胡业发, 周祖德.
2010. 差动式磁悬浮主动隔振系统的控制机理研究. 振动与冲击, 29(7): 24–27, 104.
|
|
滕云田, 吴琼, 郭有光, 等.
2013. 基于激光干涉的新型高精度绝对重力仪. 地球物理学进展, 28(4): 2141–2147.
DOI:10.6038/pg20130459 |
|
吴刚, 张育林, 刘昆, 等.
2004. 永磁电磁轴承磁力的两种线性化方法. 机械设计, 21(3): 12–14.
|
|
吴琼. 2011. 高精度绝对重力仪关键技术研究[博士论文]. 北京: 中国地震局地球物理研究所.
http://cdmd.cnki.com.cn/Article/CDMD-85401-1011184902.htm |
|
吴琼, 郝晓光, 滕云田, 等.
2012. 系统自振对绝对重力仪的影响模式分析. 武汉大学学报·信息科学版, 37(8): 980–983.
|
|
吴书清. 2012. 基于自由落体原理的绝对重力仪关键技术的研究及应用[硕士论文]. 北京: 中国计量科学研究院.
http://cdmd.cnki.com.cn/Article/CDMD-85801-1012418556.htm |
|
杨学山. 2001.
工程振动测量仪器和测试技术. 北京: 中国计量出版社.
|
|
张善法, 孟令顺, 杜晓娟, 等.
2009. 高精度重力测量在金矿采空区探测中的应用研究. 地球物理学进展, 24(2): 590–595.
DOI:10.3969/j.issn.1004-2903.2009.02.029 |
|