
Safety and effectiveness of domestic SR-ENS-600 single-port robotic laparoscopic system in treatment of benign gynecological diseases: a single-arm study
-
摘要:
目的 初步评估国产SR-ENS-600单孔腹腔镜手术机器人系统治疗妇科良性疾病的安全性及有效性。 方法 本研究为单臂试验,选取2023年1月至2025年4月于北京协和医院妇产科接受手术的患者28例,应用国产SR-ENS-600单孔腹腔镜手术机器人系统对患者实施手术。其中14例患者接受单孔机器人卵巢囊肿剔除/附件切除术(SRC组),2例接受单孔机器人子宫肌瘤剔除术(SRM组),12例接受单孔机器人全子宫切除术(SRH组)。记录手术成功率、手术时间、出血量、肛门排气时间、术后住院时间、并发症及不良事件等。 结果 手术成功率为100.0%,无中转开腹或多孔腹腔镜手术。SRC组的手术时间为(90.50±34.20)min,SRM组2例患者分别为65.00 min和152.00 min,SRH组为(165.33±40.22)min,全组为(123.86±52.17)min。SRC组的出血量为5.00(5.00,6.25)mL,SRM组2例患者分别为5.00 mL和50.00 mL,SRH组为20.00(10.00,50.00)mL,全组为10.00(5.00,27.50)mL。SRC组的肛门排气时间为(16.71±6.47)h,SRM组2例患者分别为17.00 h和20.00 h,SRH组为(25.21±7.46)h,全3组为(20.48±7.79)h。SRC组的术后住院时间为2.00(2.00,3.00)d,SRM组2例患者均为2.00 d,SRH组为5.00(2.25,5.75)d,全组为3.00(2.00,3.75)d。无一例患者发生术中或术后并发症,或再入院手术;无严重不良事件发生。 结论 初步研究结果显示国产SR-ENS-600单孔腹腔镜手术机器人系统治疗妇科良性疾病安全、有效,出血量少、住院时间短。 Abstract:Objective To evaluate the safety and effectiveness of the domestic SR-ENS-600 single-port robotic laparoscopic system for benign gynecological diseases. Methods This study was conducted as a single-arm design. A total of 28 patients who underwent surgery at the Department of Obstetrics and Gynecology of Peking Union Medical College Hospital between Jan. 2023 and Apr. 2025 were enrolled. The procedures were performed using the domestic SR-ENS-600 single-port robotic laparoscopic system. Among them, 14 patients underwent single-port robotic ovarian cystectomy/adnexectomy (SRC group), 2 underwent single-port robotic myomectomy (SRM group), and 12 underwent single-port robotic total hysterectomy (SRH group). The surgical success rate, operative time, blood loss, time to return of bowel activity, postoperative hospital stay, complications, and adverse events were recorded. Results The surgical success rate was 100.0%, with no conversions to laparotomy or multi-port laparoscopic surgery. The operative time was (90.50±34.20) min in the SRC group, 65.00 min and 152.00 min for the 2 cases in the SRM group, (165.33±40.22) min in the SRH group, and (123.86±52.17) min for all the patients. The blood loss was 5.00 (5.00, 6.25) mL in the SRC group, 5.00 mL and 50.00 mL for the 2 cases in the SRM group, 20.00 (10.00, 50.00) mL in the SRH group, and 10.00 (5.00, 27.50) mL for all the patients. The time to return of bowel activity was (16.71±6.47) h in the SRC group, 17.00 h and 20.00 h for the 2 cases in the SRM group, (25.21±7.46) h in the SRH group, and (20.48±7.79) h for all patients. The postoperative hospital stay was 2.00 (2.00, 3.00) d in the SRC group, 2.00 d for both cases in the SRM group, 5.00 (2.25, 5.75) d in the SRH group, and 3.00 (2.00, 3.75) d for all the patients. No intraoperative or postoperative complications, reoperations, or serious adverse events occurred in any patients. Conclusion Preliminary results indicate that the domestic SR-ENS-600 single-port robotic laparoscopic system is safe and effective for the treatment of benign gynecological diseases, with less blood loss and shorter postoperative hospital stay. -
Keywords:
- single-port robotic surgery /
- benign gynecological diseases /
- perioperation /
- safety
-
微创手术是妇科良性疾病的主流治疗方式,其中单孔腹腔镜手术(laparoendoscopic single-site surgery,LESS)因其切口隐蔽、并发症少、疼痛轻、住院时间短及医疗成本低等优势,受到越来越多的关注。调查显示,64%的妇科患者更偏好LESS的瘢痕外观[1]。然而,该术式因存在器械三角关系丧失、操作空间狭小、视野受阻、器械拥挤及相互碰撞等问题[2],具有特殊的学习曲线,对外科医师挑战极大。为此,国内外相关企业纷纷开发机器人平台,旨在帮助恢复腹腔内三角关系并保持最大的操作自由度,实现精确操作。机器人辅助单孔腹腔镜手术(robot-assisted laparoendoscopic single-site surgery,R-LESS)兼具微创与操作精准的优势,由美国直觉外科公司(Intuitive Surgical)特别设计的达芬奇SP单孔手术机器人系统于2018年获得美国FDA批准用于临床,但该进口系统未获准出口至中国。由北京术锐机器人股份有限公司研发的SR-ENS-600系统采用创新的对偶连续体机械臂设计,解决了传统单孔手术中器械碰撞的难题。本研究通过单臂试验,并将结果与文献[3-4]对比,初步评估应用SR-ENS-600单孔腹腔镜手术机器人系统治疗妇科良性疾病的安全性与有效性。
1 资料和方法
1.1 研究对象
本研究已获得北京协和医院伦理委员会批准(批准号K2022566)。研究于2023年1月至2025年4月在北京协和医院妇产科普通妇科中心开展,采用单臂设计。
根据纳入和排除标准招募符合条件的卵巢囊肿、子宫肌瘤、宫颈上皮内瘤变和子宫内膜病变患者。纳入标准:(1)年龄18~75岁;(2)有择期妇科手术指征;(3)能够耐受手术和麻醉;(4)无复杂妇科疾病史或严重疾病史;(5)无精神疾病史;(6)BMI≤32 kg/m2;(7)同意参与研究,依从性良好并自愿签署知情同意书。排除标准:(1)有2次以上盆腔或腹部手术史或严重盆腔粘连史;(2)伴有急性生殖道或全身感染;(3)存在凝血功能障碍或长期接受抗凝药物治疗;(4)伴有严重心肺功能疾病、肝肾功能不全,或无法耐受麻醉;(5)有腹壁或膈疝、脐部发育异常或脐部手术史;(6)拒绝接受腹腔镜手术;(7)术前3个月内曾参与其他药物或器械临床试验。
1.2 手术方法
所有患者在入组前均签署了书面知情同意书,所有操作均按照相关规定进行。术前完善病史采集、生命体征监测、全身及妇科体格检查、实验室和影像学检查。所有手术均由3名具有传统LESS和机器人内镜手术系统经验的妇科医师完成。
简要步骤如下:手术使用国产SR-ENS-600单孔腹腔镜手术机器人系统(北京术锐机器人股份有限公司)完成。采用开放式Hasson法于脐部做一约25 mm长的纵行切口,依次置入切口保护套、Port及专用鞘管以建立气腹。患者采取头低脚高位,将手术台车停放在患者右侧并行对接,随后装载手术器械和3D内镜并经鞘管置入腹腔。术者于控制台操作触觉设备,远程操控手术器械或3D内镜完成手术。术毕连续缝合腹膜与腹直肌鞘、皮下组织,皮肤切口采用皮内缝合的方式,逐层关闭切口[5]。
1.3 SR-ENS-600单孔腹腔镜手术机器人系统的特点
国产SR-ENS-600单孔腹腔镜手术机器人系统的手术器械和3D内镜均由对偶连续体机构组成。与传统由关节和刚性连杆组成的器械不同,对偶连续体机构由近端构节、远端构节及导向钢管束组成。其工作原理为近端构节的弯曲通过超弹性镍钛合金结构骨的平移(推拉)耦合到远端构节的弯曲,进而通过连续变形实现运动。见图 1。多个结构骨的失效不会影响机构的功能,结构骨还可以协同平衡外部载荷。这种结构设计具有诸多优势,如机械臂灵活、尺寸紧凑,同时能提供足够的三角关系和运动自由度[6]。
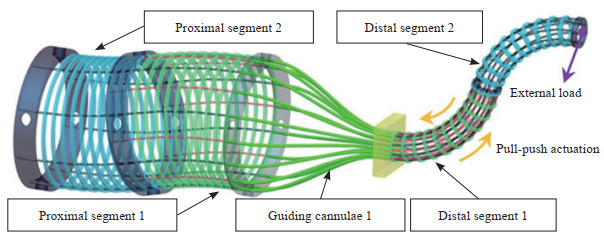 图 1 国产SR-ENS-600单孔腹腔镜手术机器人系统对偶连续体机构Fig. 1 Dual continuous mechanism of domestic SR-ENS-600 single-port robotic laparoscopic system
图 1 国产SR-ENS-600单孔腹腔镜手术机器人系统对偶连续体机构Fig. 1 Dual continuous mechanism of domestic SR-ENS-600 single-port robotic laparoscopic system 下载:
全尺寸图片
下载:
全尺寸图片
1.4 观察指标
记录患者的人口统计学信息、围手术期参数、并发症(包括邻近器官损伤、发热、手术部位感染、盆腔血肿、血栓栓塞和术后肠梗阻)等。主要结局指标为手术成功率,手术成功的判定标准为未因任何原因而中转开腹手术或采用其他传统内镜手术。手术成功率(%)=按计划完成手术的例数/全部手术例数×100%。次要评估指标包括手术时间、出血量、术后住院时间、肛门排气时间及安全性评估参数(实验室检查结果、生命体征情况、再手术率、围手术期并发症和不良事件/严重不良事件的发生情况)。
1.5 质量控制
研究开始前,对所有参与研究的人员均进行了相关培训,确保每位成员充分理解研究流程。所有术者均具备相关手术经验,以减少手术技能差异对试验结果造成的偏倚。资料收集人员均接受了专门培训,以避免数据错误对试验结果的影响。
1.6 统计学处理
应用SPSS 25.0软件进行统计学分析。符合正态分布的计量资料以x±s表示,不符合正态分布的计量资料则以M(Q1,Q3)表示;计数资料以例数和百分数表示。为进行对比,本研究结果与文献中报道较多的、采用达芬奇SP单孔手术机器人系统实施同类手术所取得的结果进行了比较,其中Kim等[3]的研究报告了按具体术式细分的数据[单孔机器人卵巢囊肿剔除/附件切除术(single-port robotic ovarian cystectomy/adnexectomy,SRC)组108例、单孔机器人子宫肌瘤剔除术(single-port robotic myomectomy,SRM)组56例、单孔机器人全子宫切除术(single-port robotic total hysterectomy,SRH)组35例],但未提供所有术式的汇总结果;而Shin等[4]则报告了总体数据(共31例)。
2 结果
2.1 基线资料
本研究共纳入患者28例,其中26例(92.9%)为汉族;8例(28.6%)有既往手术史;8例(28.6%)患者已绝经,绝经时间为1.5(1.0,6.5)年,6例(21.4%)患者有痛经史。所有患者的妊娠次数和分娩次数分别为2.5(1.0,4.0)次和1.0(0.0,2.0)次。14例(50.0%)患者接受了SRC,2例(7.1%)接受了SRM,12例(42.9%)接受了SRH。患者年龄、BMI与文献[3-4]数据的对比见表 1。在年龄方面,全体患者的年龄明显低于文献[4]报道,SRC、SRM和SRH组的年龄均与文献[3]数据接近;在BMI方面,SRM组的BMI明显低于文献[3]报道。
Item SRC group SRM group SRH group All Case
n=14Literature[3]
n=108Casea
n=2Literature[3]
n=56Case
n=12Literature[3]
n=35Case
N=28Literature[4]
N=31Age/year 30.00±6.25 31.79±10.31 29, 39 36.98±7.14 48.75±9.83 49.71±7.86 38.32±12.07 47.7±12.8 BMI/(kg·m-2) 21.24±2.97 22.86±4.39 17.40, 18.00 23.09±4.19 24.45±4.00 24.40±3.74 22.36±3.87 22.7±3.1 a: Due to the small sample size (n=2), the original data are presented. SRC: Single-port robotic ovarian cystectomy/adnexectomy; SRM: Single-port robotic myomectomy; SRH: Single-port robotic total hysterectomy; BMI: Body mass index. 2.2 围手术期指标
手术成功率为100.0%,无中转开腹或多孔腹腔镜手术者。因患者人口统计学特征与文献存在差异,故本研究的围手术期指标未行统计学检验。结果如表 2所示,SRH组的手术时间明显长于文献[3]报道,SRC、SRM组及全组的手术时间与文献[3]和[4]数据接近;全组的出血量和排气时间均小于文献[4]报道;SRC、SRM组及全组的术后住院时间较文献[3]和[4]报道缩短。
Group n Operative time/min Blood loss/mL Return of bowel activity/h Postoperative hospital stay/d SRC Case 14 90.50±34.20 8.07±7.58b 16.71±6.47 2.29±0.73c Literature[3] 108 81.90±45.07 4.55±1.86 SRM Casea 2 65.00, 152.00 5.00, 50.00 17.00, 20.00 2.00, 2.00 Literature[3] 56 134.55±63.39 4.57±1.12 SRH Case 12 165.33±40.22 34.17±26.78b 25.21±7.46 5.17±3.24c Literature[3] 35 114.71±44.20 4.54±1.01 All Case 28 123.86±52.17 20.64±22.89b 20.48±7.79 3.50±2.59c Literature[4] 31 126.3±61.6 93.9±77.0 34.1±15.5 4.6±0.7 a: Due to the small sample size (n=2), the original data are presented; b: The original data are non-normally distributed, with SRC, SRH, and the entire set having values of 5.00 (5.00, 6.25), 20.00 (10.00, 50.00), and 10.00 (5.00, 27.50) mL, respectively; c: The original data are non-normally distributed, with SRC, SRH and the entire set having values of 2.00 (2.00, 3.00), 5.00 (2.25, 5.75) and 3.00 (2.00, 3.75) d, respectively. SRC: Single-port robotic ovarian cystectomy/adnexectomy; SRM: Single-port robotic myomectomy; SRH: Single-port robotic total hysterectomy. 2.3 安全性评估
无一例患者发生术中或术后并发症,或术后1个月内再次入院手术。
结合实验室检查及生命体征测定,28例患者中有19例发生轻度不良事件,包括1例患者腹泻3次、2例发热37.5 ℃、2例短暂皮疹、3例偶尔咳嗽、3例轻微头疼、4例轻微头晕、4例轻度失眠;6例患者发生中度不良事件,包括1例患者恶心呕吐、1例失眠、1例过敏、1例低钾和2例贫血;无严重不良事件发生。
3 讨论
过去30年,微创手术给妇科疾病的治疗带来了革命性的变化。其中,腹腔镜手术相较于开腹手术的优势已得到充分证实[7-9]。然而,传统腹腔镜技术仍存在一定局限,如反直觉的手部运动、震颤放大以及需要采用在人体工学方面具有挑战性的姿势等,这些都可能致使外科医师在长时间手术操作后感到疲劳甚至引发职业损伤。随着达芬奇手术机器人系统的出现,越来越多的手术开始采用机器人辅助的方式。相关数据显示,机器人手术在妇科手术中的占比从2007年的27.9%大幅上升到2012年的50%[10]。与此同时,LESS凭借其美容效果好而展现出巨大吸引力,然而其特殊的操作造成了诸多限制[2, 11]。R-LESS则结合了机器人技术的优势与单切口的美学效果。文献报道,与LESS子宫切除术相比,R-LESS虽手术时间较长,但能减少术中出血、缩短住院时间,并拥有更短的学习曲线[12]。尽管美国达芬奇SP单孔手术机器人系统已进入临床,但进口系统尚未进入中国市场。因此,本研究采用国产SR-ENS-600单孔腹腔镜手术机器人系统对良性妇科疾病患者进行了治疗,初步评估其安全性和有效性。
本研究中,SRC、SRM和SRH组患者的年龄与文献[3]报道的相应组别接近,全体患者的年龄[(38.32±12.07)岁]比文献[4]报道[(47.7±12.8)岁]低近10岁。在BMI方面,SRM组2例患者的BMI(17.40 kg/m2和18.00 kg/m2)低于文献[3]报道[(23.09±4.19)kg/m2],但全组患者的BMI与文献[4]报道接近。
本研究的手术成功率为100.0%(28/28)。在围手术期参数方面,本研究中SRC和SRM两组的手术时间与文献[3]报道接近,但SRH组的手术时间长于文献[3]报道[(165.33±40.22)min vs(114.71±44.20)min]。这可能与其中1例子宫腺肌病合并肌瘤、子宫不规则增大的未产患者有关。该患者经阴道取出子宫耗时较长,总手术时间达272.00 min。这提示在开展此类手术初期,应更加审慎地选择病例。但本研究全组手术时间与文献[4]报道相当[(123.86±52.17)min vs(126.3±61.6)min]。本研究中行SRC的患者占比(50.0%,14/28)较高,而SRC操作熟练后出血量普遍较少,因此全组手术的出血量显著少于文献[4]报道[(20.64±22.89)mL vs(93.9±77.0)mL];因为同样的原因,本研究中全组的肛门排气时间为(20.48±7.79)h,短于文献[4]的(34.1±15.5)h。本研究的SRC组和全组术后住院时间短于文献[3-4]报道[(2.29±0.73)d vs(4.55±1.86)d[3]和(3.50±2.59)d vs(4.6±0.7)d[4]],而术后住院时间是术后康复情况的重要参数,提示应用国产单孔手术机器人系统患者术后恢复不劣于达芬奇SP单孔手术机器人系统。在本研究和文献[3-4, 13-15]报道中,均未出现中转开腹或多孔腹腔镜手术及围手术期并发症情况。
本研究通过严格的质量控制,确保了结果的可靠性。结果表明,卵巢囊肿、子宫肌瘤、宫颈上皮内瘤变和子宫内膜病变可能是SR-ENS-600单孔腹腔镜手术机器人系统的适应证。同时本研究发现脐部切口长度以25 mm为宜,切口太小会影响鞘管插入深度,导致术中机械臂活动时鞘管脱出,进而影响手术操作的便利性和安全性。
本研究存在一定的局限性。首先,本研究采用的是单臂设计,未将国产SR-ENS-600单孔腹腔镜手术机器人系统与传统腹腔镜手术或多孔腹腔镜手术机器人系统进行直接对比。因此,后续有必要通过随机对照试验,进一步验证当前的研究结果,并明确该系统是否适用于更广泛的妇科疾病。其次,在本研究中,部分组别患者的年龄和BMI与文献资料存在差异,因此无法通过统计检验评估围手术期指标的差异是否具有统计学意义。最后,由于国产SR-ENS-600单孔腹腔镜手术机器人系统采用的对偶连续体机构,在牵拉肌瘤时的力量较传统钢丝绳结构略柔和,导致肌瘤剔除手术开展较少,使得SRM组样本量较小(n=2)。后续将结合目前操作感受,进一步改进系统设计,并扩大样本量进行验证。
本研究的初步结果显示,国产SR-ENS-600单孔腹腔镜手术机器人系统治疗妇科良性疾病安全有效,兼具出血少、康复快的优势,其效果与使用达芬奇SP单孔手术机器人系统相当。所有手术均成功完成,无须中转开腹或多孔腹腔镜手术,且未发生严重手术并发症。国产SR-ENS-600单孔腹腔镜手术机器人系统为我国单孔机器人手术的开展提供了可靠选择。
-
图 1 国产SR-ENS-600单孔腹腔镜手术机器人系统对偶连续体机构
Fig. 1 Dual continuous mechanism of domestic SR-ENS-600 single-port robotic laparoscopic system
下载:
全尺寸图片
Item SRC group SRM group SRH group All Case
n=14Literature[3]
n=108Casea
n=2Literature[3]
n=56Case
n=12Literature[3]
n=35Case
N=28Literature[4]
N=31Age/year 30.00±6.25 31.79±10.31 29, 39 36.98±7.14 48.75±9.83 49.71±7.86 38.32±12.07 47.7±12.8 BMI/(kg·m-2) 21.24±2.97 22.86±4.39 17.40, 18.00 23.09±4.19 24.45±4.00 24.40±3.74 22.36±3.87 22.7±3.1 a: Due to the small sample size (n=2), the original data are presented. SRC: Single-port robotic ovarian cystectomy/adnexectomy; SRM: Single-port robotic myomectomy; SRH: Single-port robotic total hysterectomy; BMI: Body mass index. Group n Operative time/min Blood loss/mL Return of bowel activity/h Postoperative hospital stay/d SRC Case 14 90.50±34.20 8.07±7.58b 16.71±6.47 2.29±0.73c Literature[3] 108 81.90±45.07 4.55±1.86 SRM Casea 2 65.00, 152.00 5.00, 50.00 17.00, 20.00 2.00, 2.00 Literature[3] 56 134.55±63.39 4.57±1.12 SRH Case 12 165.33±40.22 34.17±26.78b 25.21±7.46 5.17±3.24c Literature[3] 35 114.71±44.20 4.54±1.01 All Case 28 123.86±52.17 20.64±22.89b 20.48±7.79 3.50±2.59c Literature[4] 31 126.3±61.6 93.9±77.0 34.1±15.5 4.6±0.7 a: Due to the small sample size (n=2), the original data are presented; b: The original data are non-normally distributed, with SRC, SRH, and the entire set having values of 5.00 (5.00, 6.25), 20.00 (10.00, 50.00), and 10.00 (5.00, 27.50) mL, respectively; c: The original data are non-normally distributed, with SRC, SRH and the entire set having values of 2.00 (2.00, 3.00), 5.00 (2.25, 5.75) and 3.00 (2.00, 3.75) d, respectively. SRC: Single-port robotic ovarian cystectomy/adnexectomy; SRM: Single-port robotic myomectomy; SRH: Single-port robotic total hysterectomy. -
[1] GOEBEL K, GOLDBERG J M. Women's preference of cosmetic results after gynecologic surgery[J]. J Minim Invasive Gynecol, 2014, 21(1): 64-67. DOI: 10.1016/j.jmig.2013.05.004. [2] JUNG Y W, LEE M, YIM G W, et al. A randomized prospective study of single-port and four-port approaches for hysterectomy in terms of postoperative pain[J]. Surg Endosc, 2011, 25(8): 2462-2469. DOI: 10.1007/s00464-010-1567-z. [3] KIM J M, LEE S M, SEOL A, et al. Comparison of surgical outcomes between single-port laparoscopic surgery and da Vinci single-port robotic surgery[J]. J Pers Med, 2023, 13(2): 205. DOI: 10.3390/jpm13020205. [4] SHIN H J, YOO H K, LEE J H, et al. Robotic single-port surgery using the da Vinci SP® surgical system for benign gynecologic disease: a preliminary report[J]. Taiwan J Obstet Gynecol, 2020, 59(2): 243-247. DOI: 10.1016/j.tjog.2020.01.012. [5] REN C, DUAN P, SHEN Y, et al. Effectiveness and safety of SR-ENS-600endoscopic surgical system in benign and malignant gynecological diseases: a prospective, multicenter, clinical trial with 63 cases[J]. J Robot Surg, 2024, 18(1): 210. DOI: 10.1007/s11701-024-01871-4. [6] ZHANG X, LI W, CHIU P W Y, et al. A novel flexible robotic endoscope with constrained tendon-driven continuum mechanism[J]. IEEE Robot Autom Lett, 2020, 5(2): 1366-1372. DOI: 10.1109/LRA.2020.2967737. [7] PARAISO M F R, WALTERS M D, RACKLEY R R, et al. Laparoscopic and abdominal sacral colpopexies: a comparative cohort study[J]. Am J Obstet Gynecol, 2005, 192(5): 1752-1758. DOI: 10.1016/j.ajog.2004.11.051. [8] PAREDES J S, LEE C L, CHUA P T. Myomectomy: choosing the surgical approach-a systematic review[J]. Gynecol Minim Invasive Ther, 2024, 13(3): 146-153. DOI: 10.4103/gmit.gmit_152_23. [9] HADDAD S, GHADIMI K, ABRISHAMKAR R, et al. Comparing laparoscopy and laparotomy procedures in the radical hysterectomy surgery for endometrial cancer: a basic review[J]. Am J Transl Res, 2021, 13(4): 2456-2461. [10] CONRAD L B, RAMIREZ P T, BURKE W, et al. Role of minimally invasive surgery in gynecologic oncology: an updated survey of members of the Society of Gynecologic Oncology[J]. Int J Gynecol Cancer, 2015, 25(6): 1121-1127. DOI: 10.1097/IGC.0000000000000450. [11] Wolters Kluwer Health. Single-port robotic surgery improves patient ratings of scarring after urologic procedures[EB/OL]. (2022-10-22)[2025-07-01]. https://www.eurekalert.org/news-releases/968630. [12] 汪超, 王育. 手术机器人在妇科疾病诊疗中的优势和前景展望[J]. 机器人外科学杂志(中英文), 2021, 2(4): 313-323. DOI: 10.12180/j.issn.2096-7721.2021.04.010. [13] HU X, RUAN M, ZHU L, et al. This is the first in-human trial and prospective case series of a novel single-port robotic system for gynaecological surgery: an IDEAL stage 2a study[J]. Int J Med Robot, 2024, 20(5): e2657. DOI: 10.1002/rcs.2657. [14] LEE J H, YOO H K, PARK S Y, et al. Robotic single-port myomectomy using the da Vinci SP surgical system: a pilot study[J]. J Obstet Gynaecol Res, 2022, 48(1): 200-206. DOI: 10.1111/jog.15076. [15] MISAL M, MAGTIBAY P M, YI J. Robotic LESS and reduced-port hysterectomy using the da Vinci SP surgical system: a single-institution case series[J]. J Minim Invasive Gynecol, 2021, 28(5): 1095-1100. DOI: 10.1016/j.jmig.2020.08.009.
