
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
New Bilinear Bäcklund Transformation and Higher Order Rogue Waves with Controllable Center of a Generalized (3+1)-Dimensional Nonlinear Wave Equation
Cite this Article
Shen Ya-Li, Yao Ruo-Xia, Li Yan. New Bilinear Bäcklund Transformation and Higher Order Rogue Waves with Controllable Center of a Generalized (3+1)-Dimensional Nonlinear Wave Equation. Communications in Theoretical Physics, 2019, 71(2): 161 
Permissions
New Bilinear Bäcklund Transformation and Higher Order Rogue Waves with Controllable Center of a Generalized (3+1)-Dimensional Nonlinear Wave Equation
† Corresponding author. E-mail:
Supported by the National Natural Science Foundation of China (11471004,11501498), Shaanxi Key Research and Development Pro-grams (2018SF..251) and the Research Project at Yuncheng University [XK2012007]
Abstract
Abstract
In this paper, we first obtain a bilinear form with small perturbation u0 for a generalized (3+1)-dimensional nonlinear wave equation in liquid with gas bubbles. Based on that, a new bilinear Bäcklund transformation which consists of four bilinear equations and involves seven arbitrary parameters is constructed. After that, by applying a new symbolic computation method, we construct the higher order rogue waves with controllable center to the generalized (3+1)-dimensional nonlinear wave equation. The rogue waves present new structure, which contain two free parameters α and β. The dynamic properties of the higher order rogue waves are demonstrated graphically. The graphs tell that the parameters α and β can control the center of the rogue waves.
Keyword:generalized (3+1)-dimensional nonlinear wave equation;bilinear Bäcklund
transformation;symbolic computation method;rogue wave
1 Introduction
It is well known that nonlinear evolution equations (NLEEs) can demonstrate many interesting nonlinear dynamic behaviors in the fields of optical fibers, atmospheric science, plasma physics, marine science etc. Searching for explicit solutions of NLEEs has always been a difficult and tedious but very important and meaningful work. So far, many kinds of powerful methods have been proposed. For instance, inverse scattering transformation (IST),[1] Painlevé analysis,[2] Hirota bilinear method,[3–4]Bäcklund transformations (BT),[5–6]Darboux transformations (DT),[7] Lie symmetry method,[8–9]etc.
In recent years, the study about rogue waves has attracted more and more attention in nonlinear science. It depicts a unique event that seems to appear from nowhere and disappear without a trace,[10] and may appear in a variety of different fields.[11–14]In mathematical physics, rogue wave solution is a kind of interesting rational solution and is localized both in space and time. Many important results like rogue wave solutions were obtained for NLEEs.[15–26]Recently, rogue wave solutions and rational solutions to some higher dimensional nonlinear systems are constructed by symbolic computation method. Inspired by the literatures,[27–31]we obtain some higher order rogue waves with controllable center to a generalized (3+1)-dimensional nonlinear wave equation.
In this paper, we would like to focus on the generalized (3+1)-dimensional nonlinear wave equation in liquid containing gas bubbles




The main purpose of this paper is to construct the bilinear BT of Eq. (
This paper is organized as follows. In Sec.
2 Bilinear BT
To begin with, we take the following transformation


It is well known that Bäcklund transformation is a useful concept and an effective tool in the study of soliton systems. Firstly, we list the relevant bilinear identities, which can be proved directly.[3]





Next we construct the bilinear Bäcklund transformation for Eq. (






In the above deduction, the coefficients of λi (i = 1,2,5) are zeros because of Eq. (
3 Application of BT
Let us take a simple solution f = 1 to Eq. (

3.1 Traveling Wave Solution
Consider a class of exponential wave solution

Thus we obtain the following exponential wave solution to Eq. (

So

Next, we consider a class of the first-order polynomial solution

So

3.2 Mixed Solution
Next, we consider a class of mixed solution with form



So

4 Higher Order Rogue Waves
4.1 Algorithm for Rogue Waves
For a (3+1)-dimensional nonlinear system

Choosing a traveling wave transformation




Assume f in Eq. (

Substituting Eq. (
The method presented here are motivated by literatures,[29–30]but the ranges of parameter indexes in system (
4.2 Rogue Wave Solutions
Setting ξ = x + ky + ωt in Eq. (


According to the above approach, we derive several higher order rogue wave solutions with controllable center of Eq. (
We take

Substituting Eq. (
Further, we can verify that


The rogue wave solution (
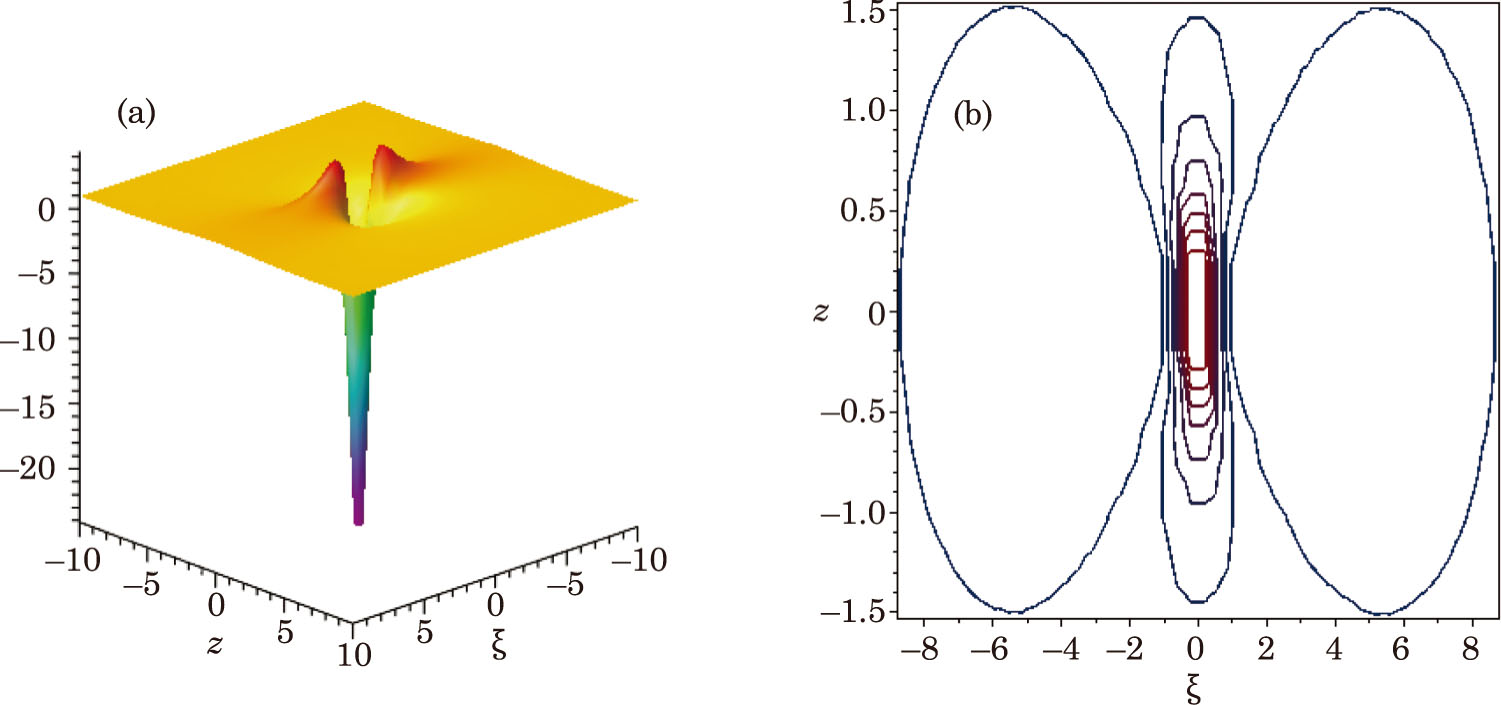
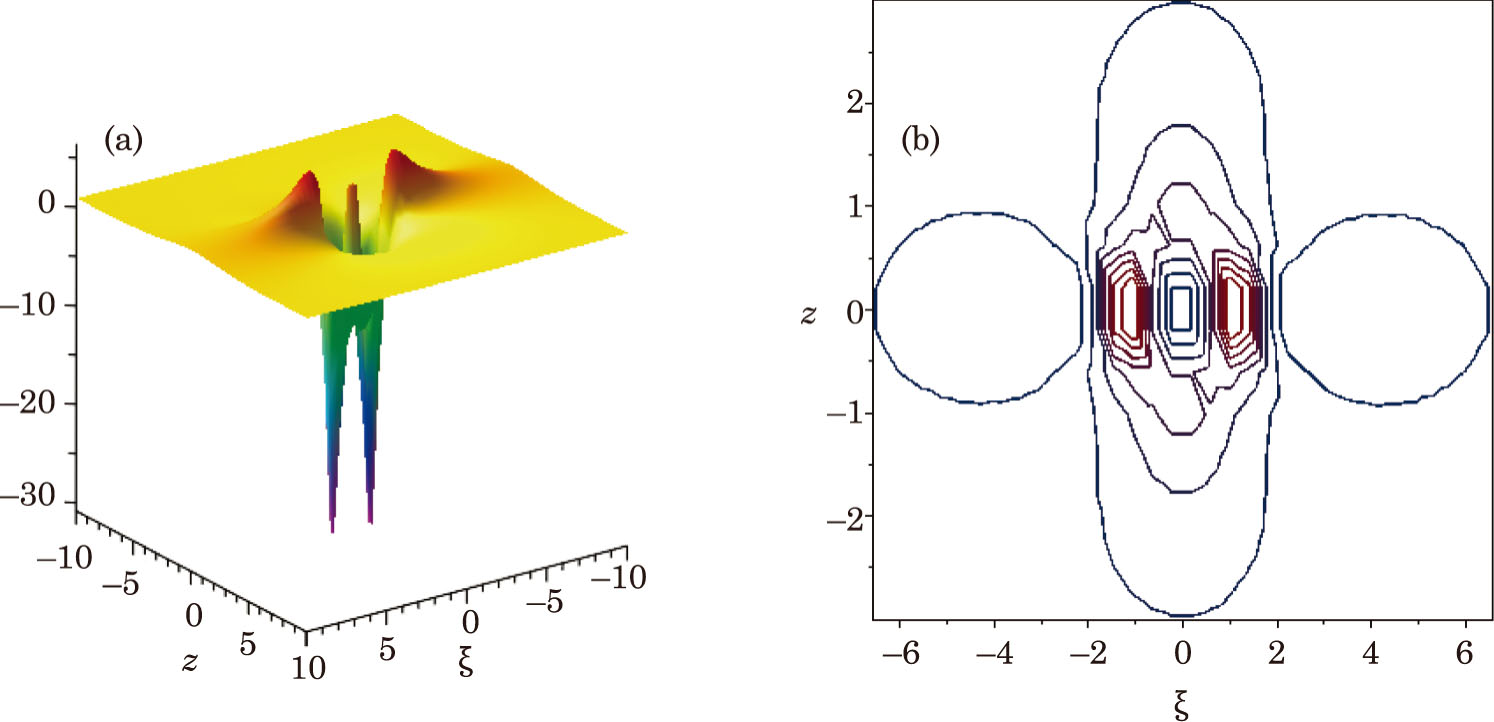
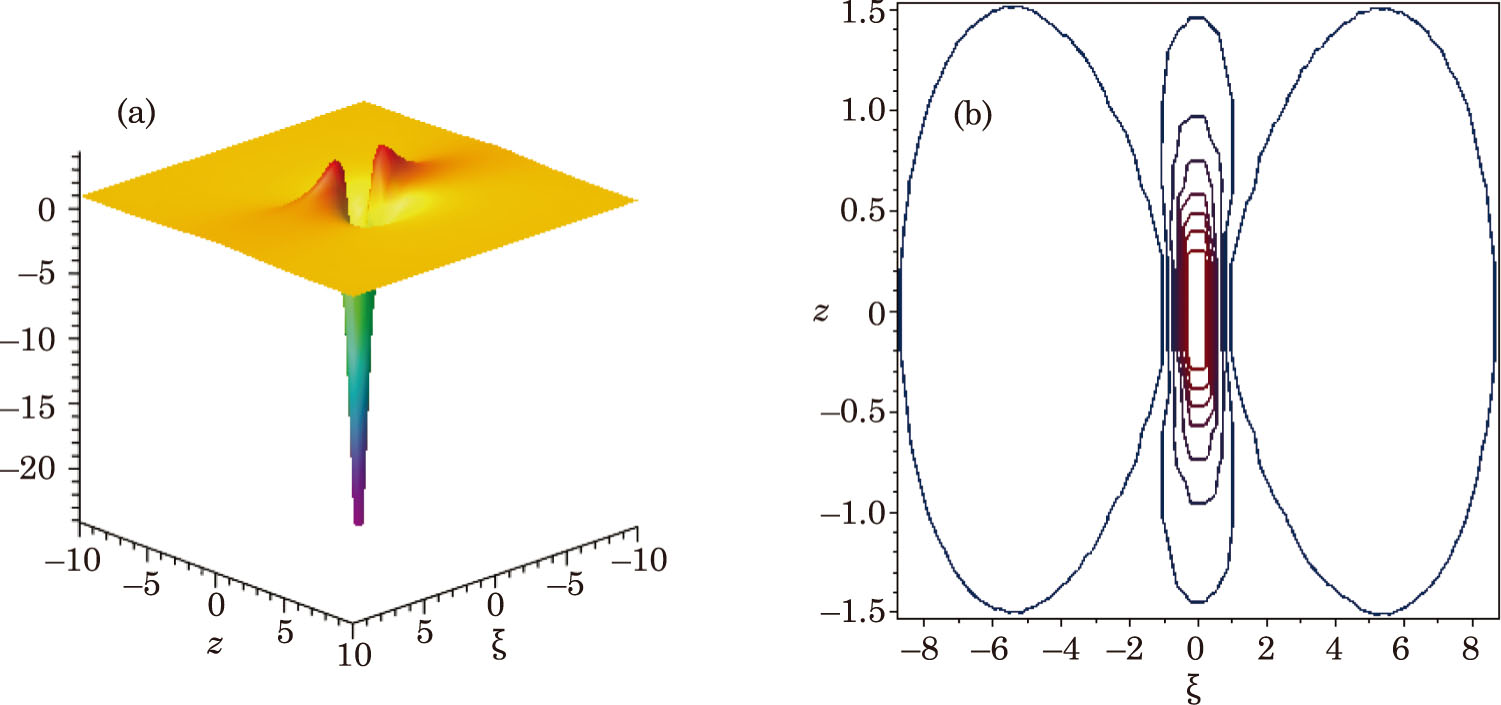 | Fig. 1 The first order rogue wave evolution graph (a) and contour plot (b) for Eq. ( |
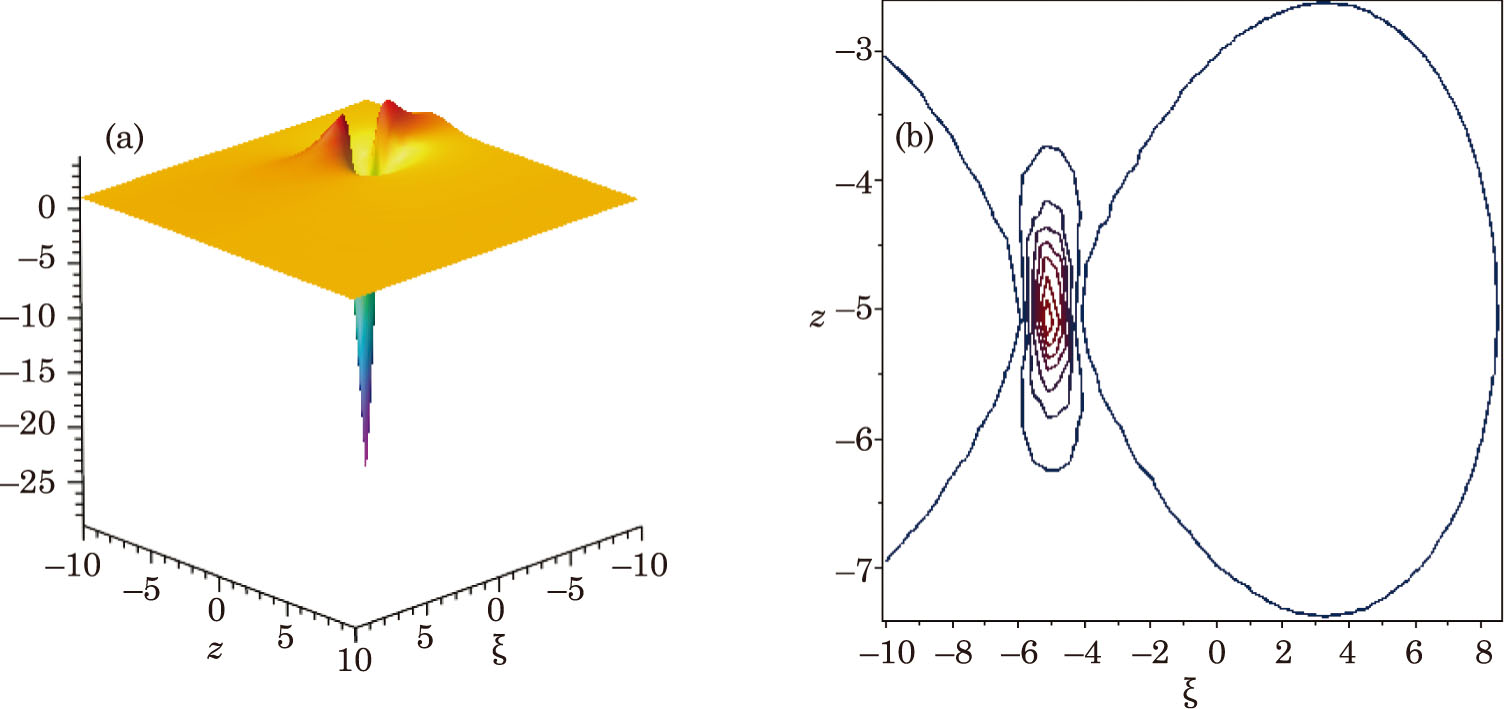 | Fig. 2 The first order rogue wave evolution graph (a) and contour plot (b) for Eq. ( |
We take


If choosing some appropriate parameter values in Eq. (
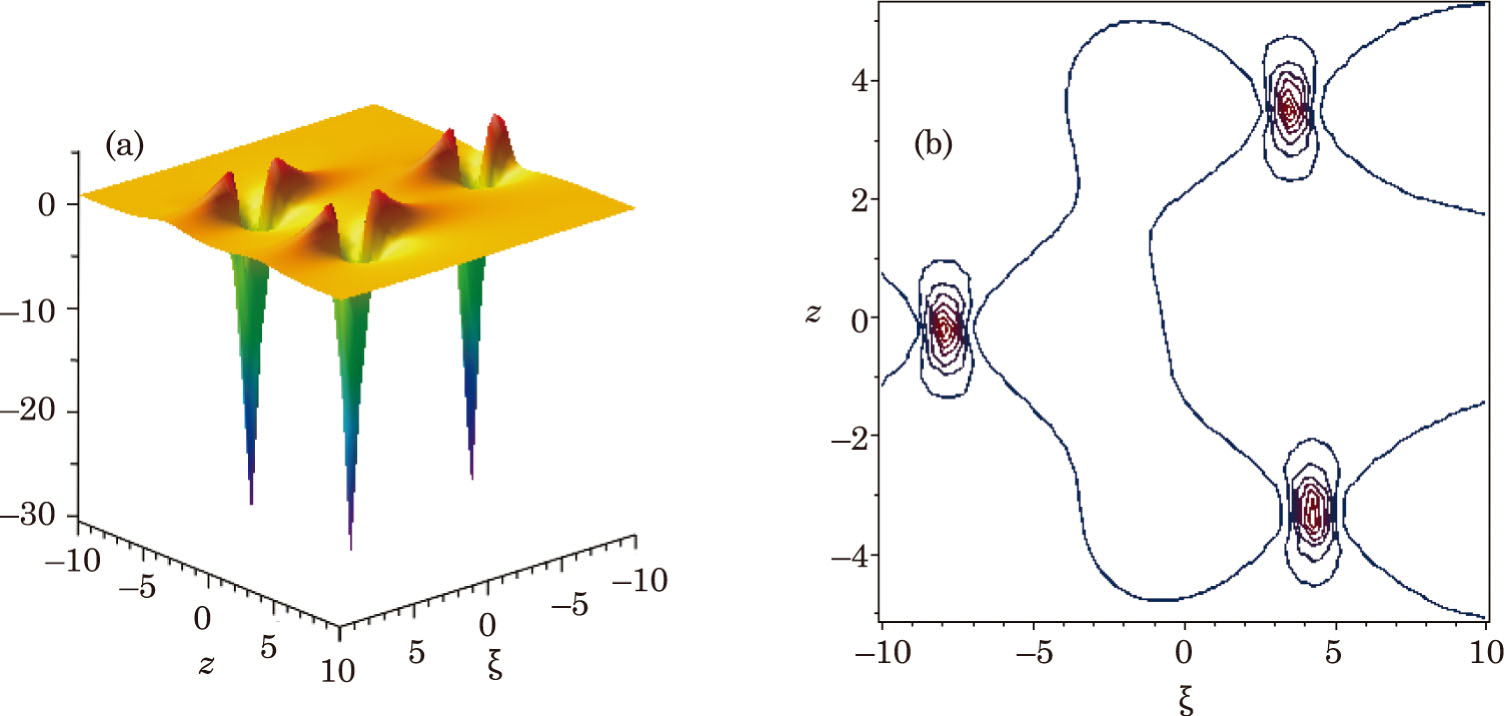
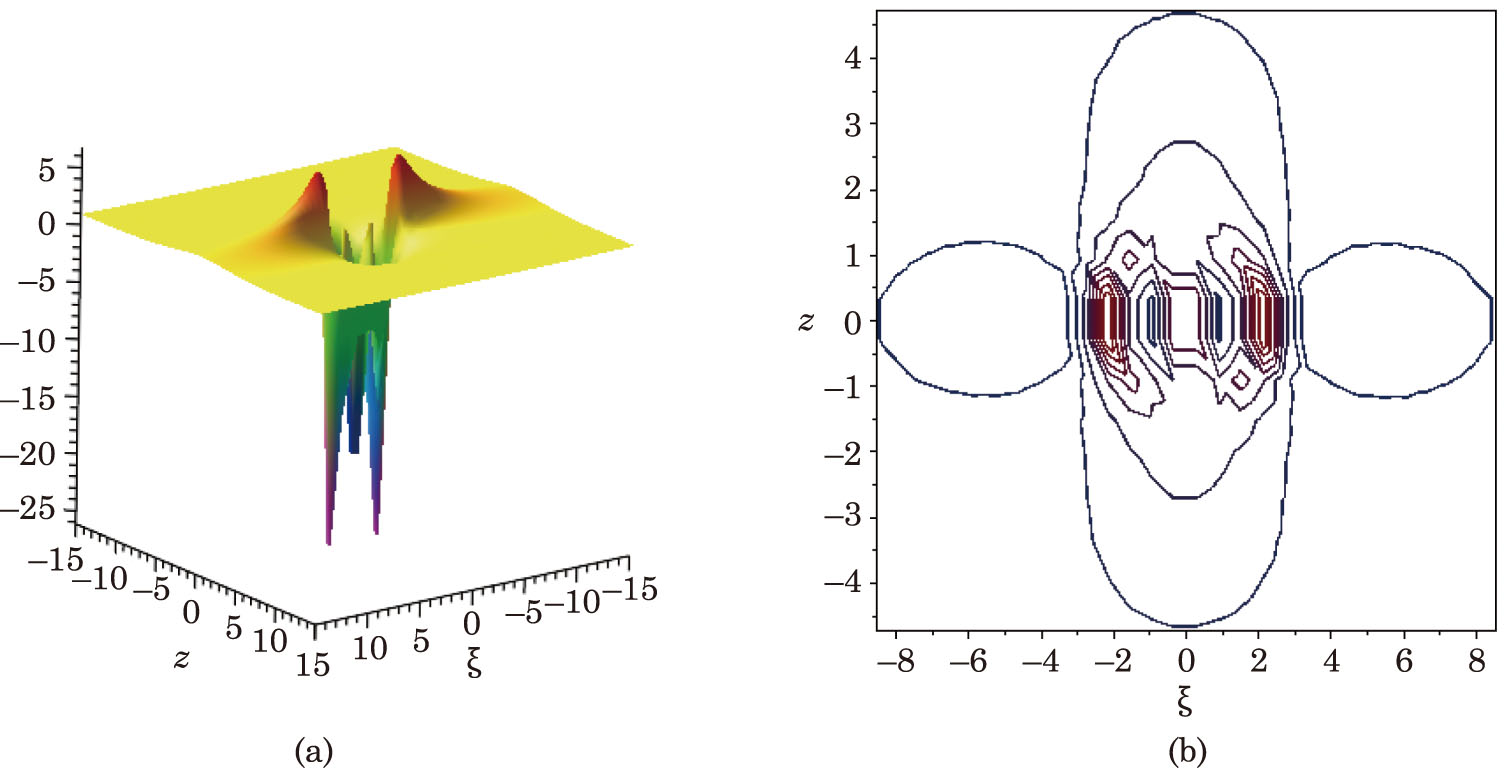
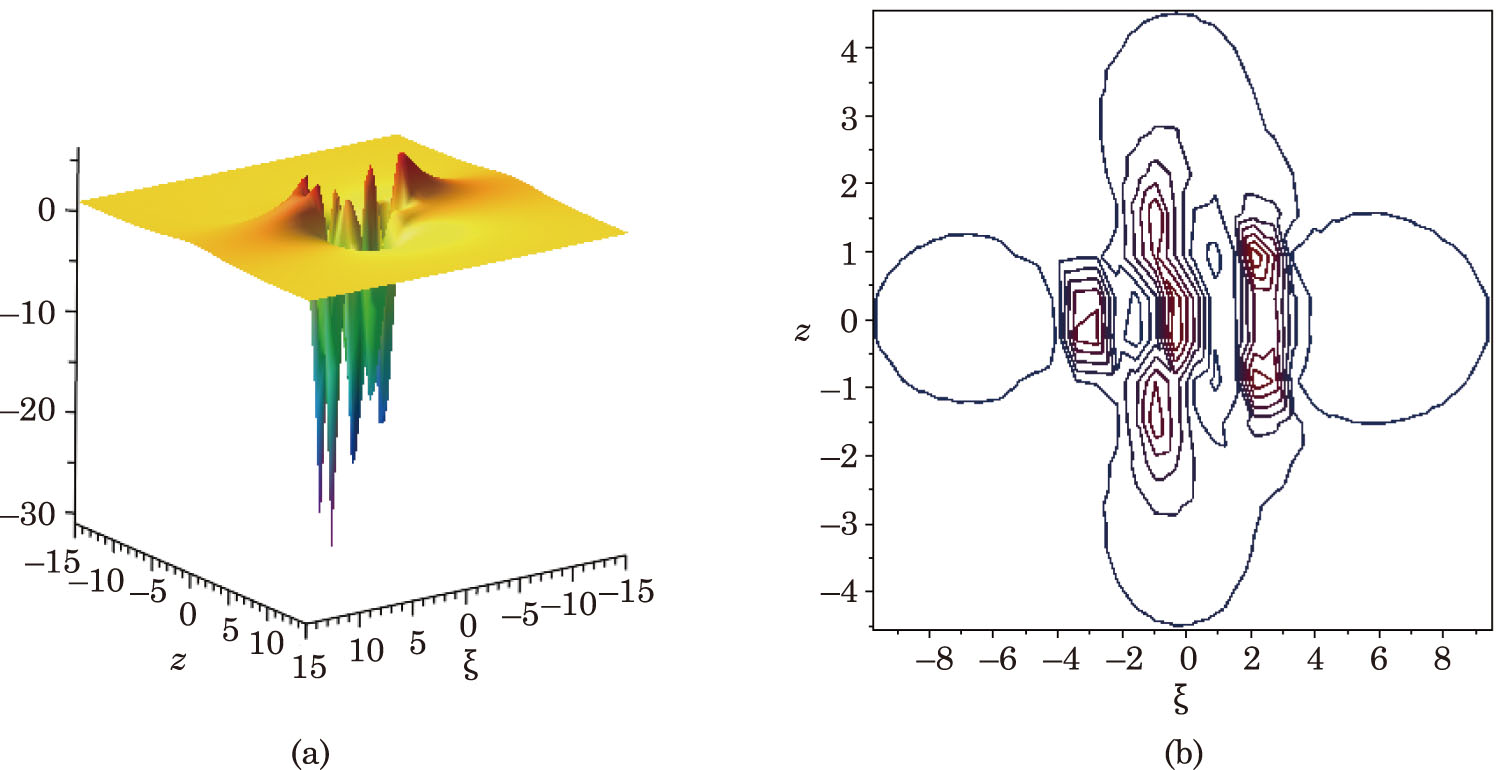
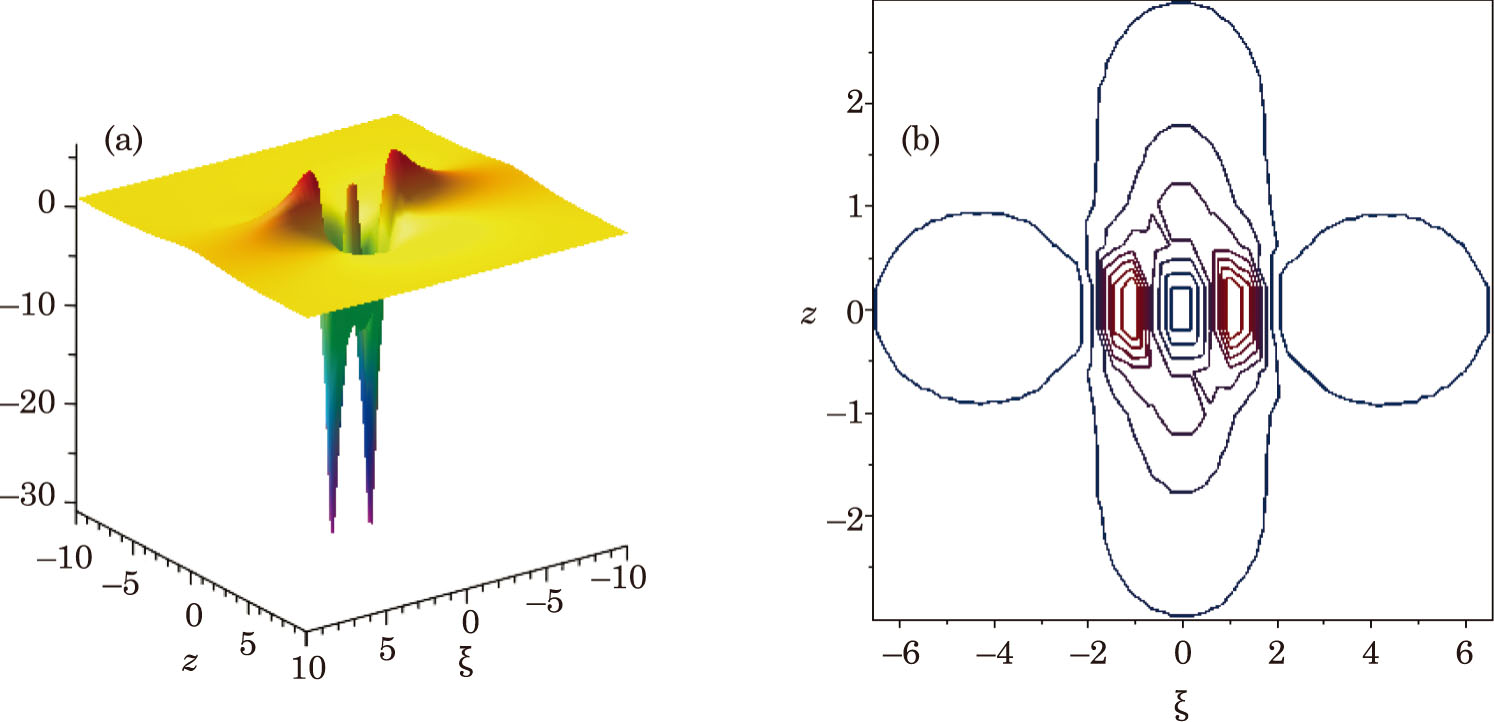 | Fig. 3 The second order rogue wave evolution graph (a) and contour plot (b) for Eq. ( |
 | Fig. 4 The second order rogue wave evolution graph (a) and contour plot (b) for Eq. ( |
We take



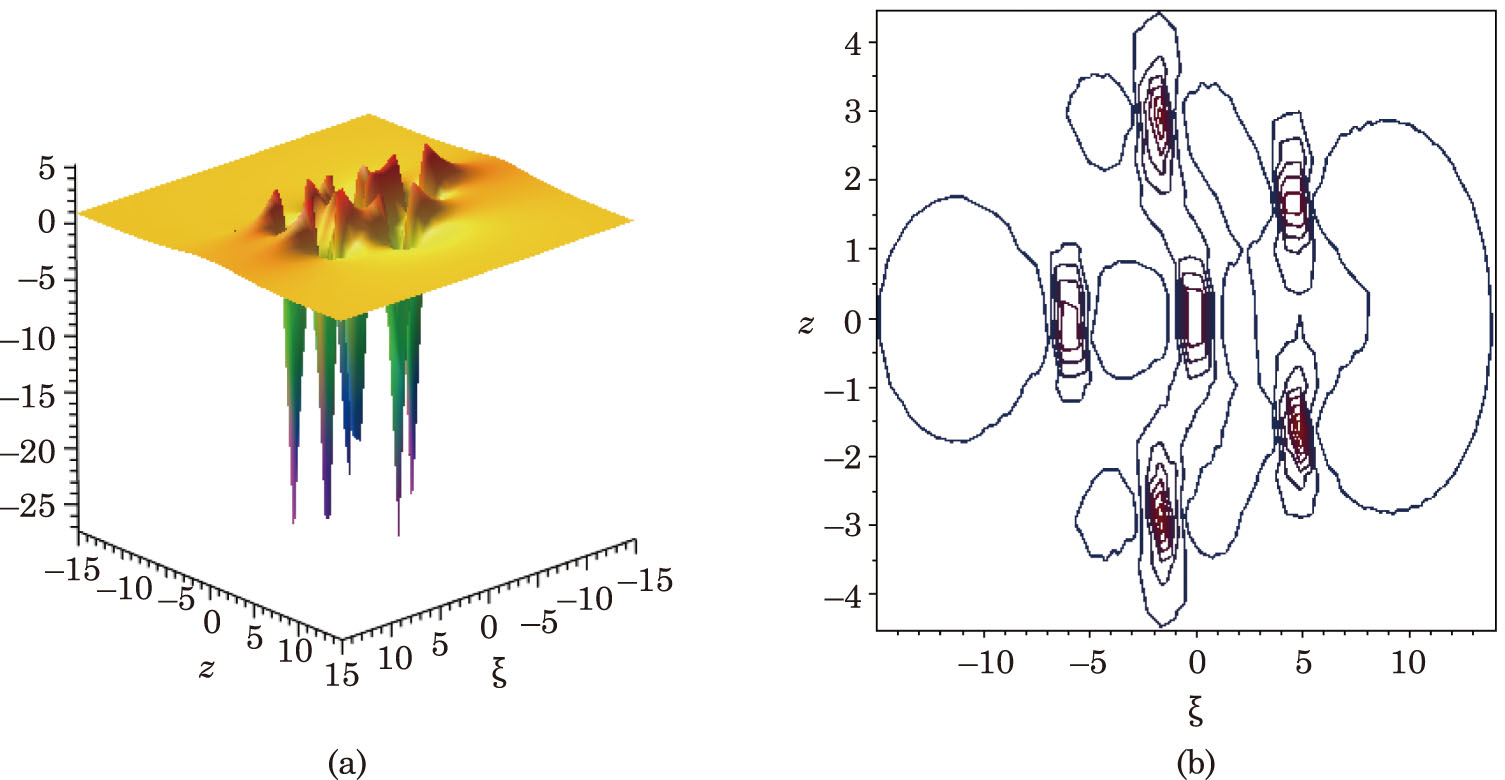
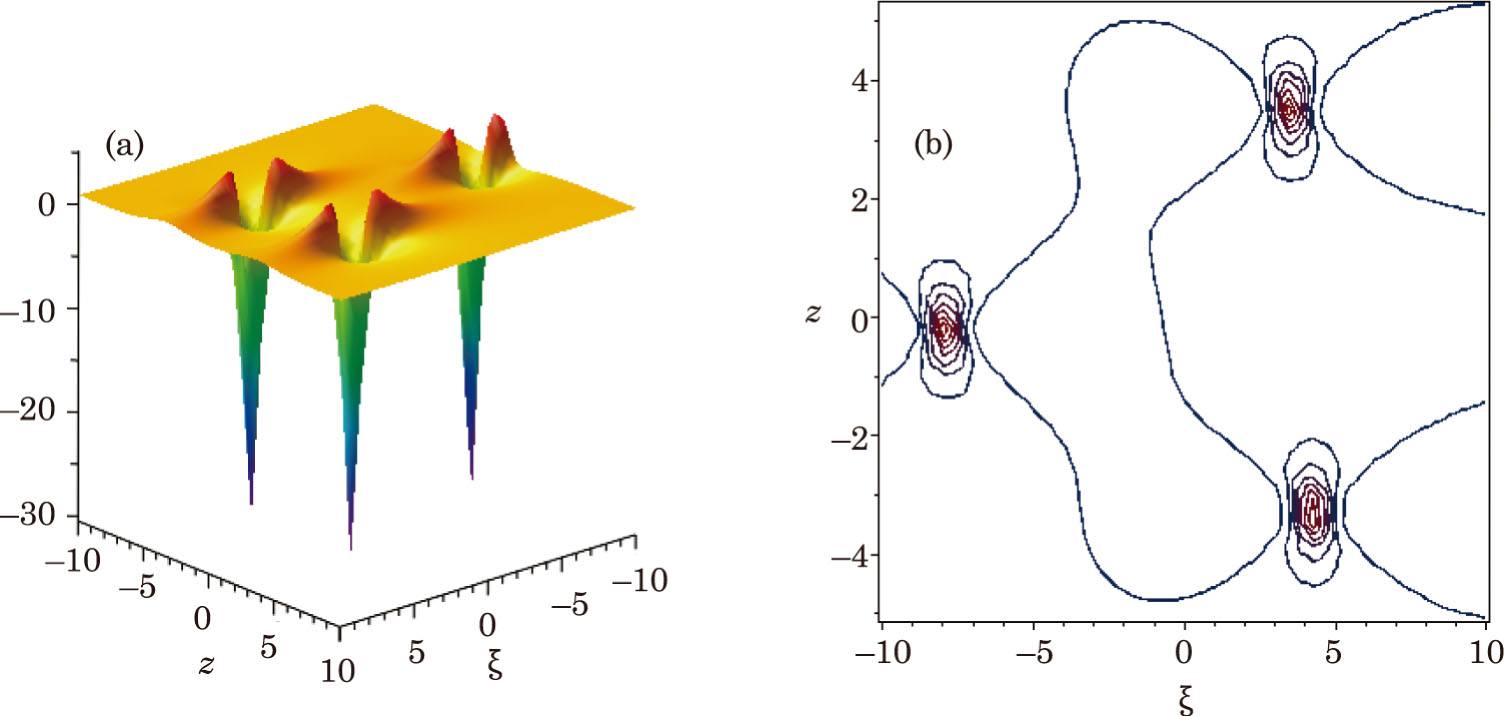
 | Fig. 5 The third order rogue wave evolution graph (a) and contour plot (b) for Eq. ( |
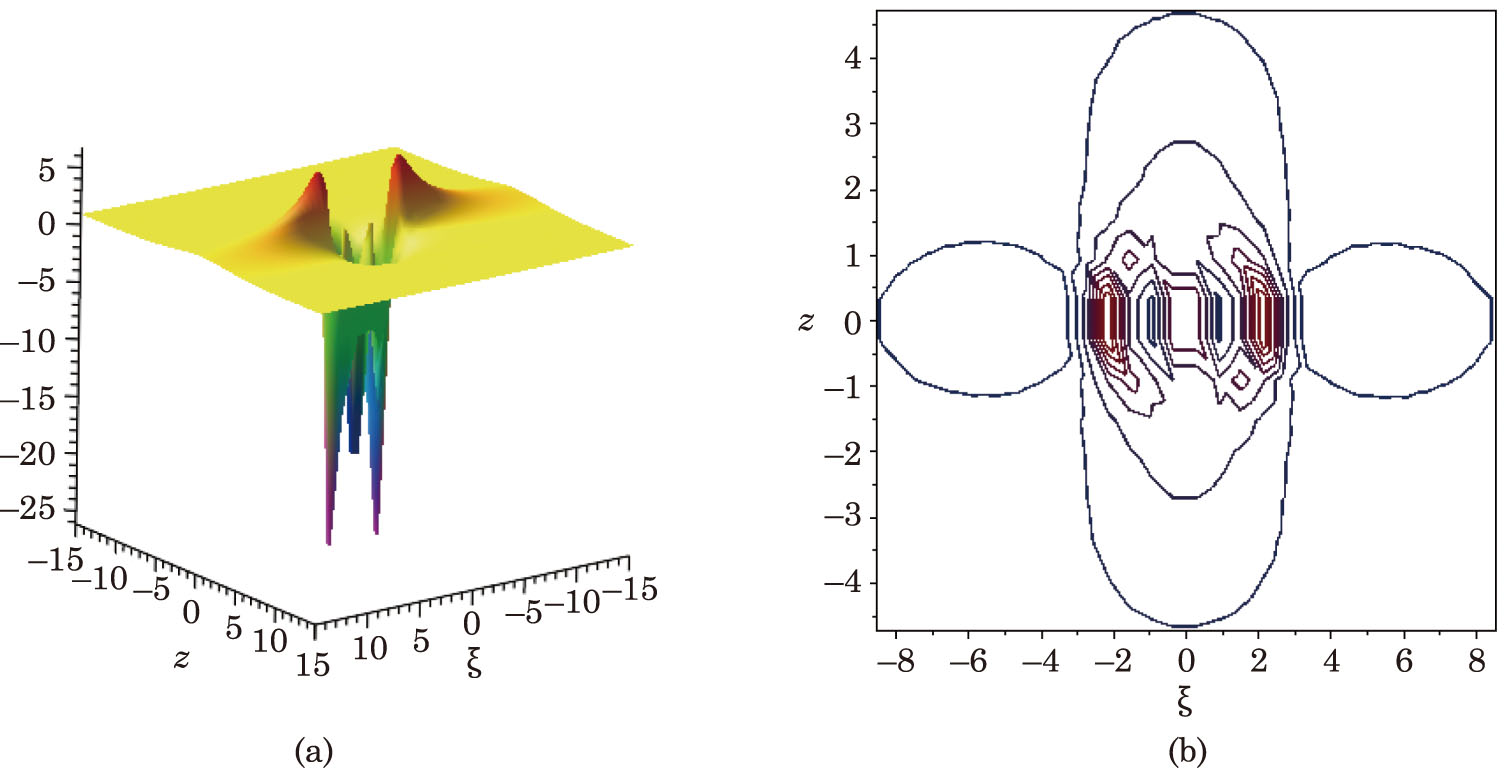
 | Fig. 6 The third order rogue wave evolution graph (a) and contour plot (b) for Eq. ( |
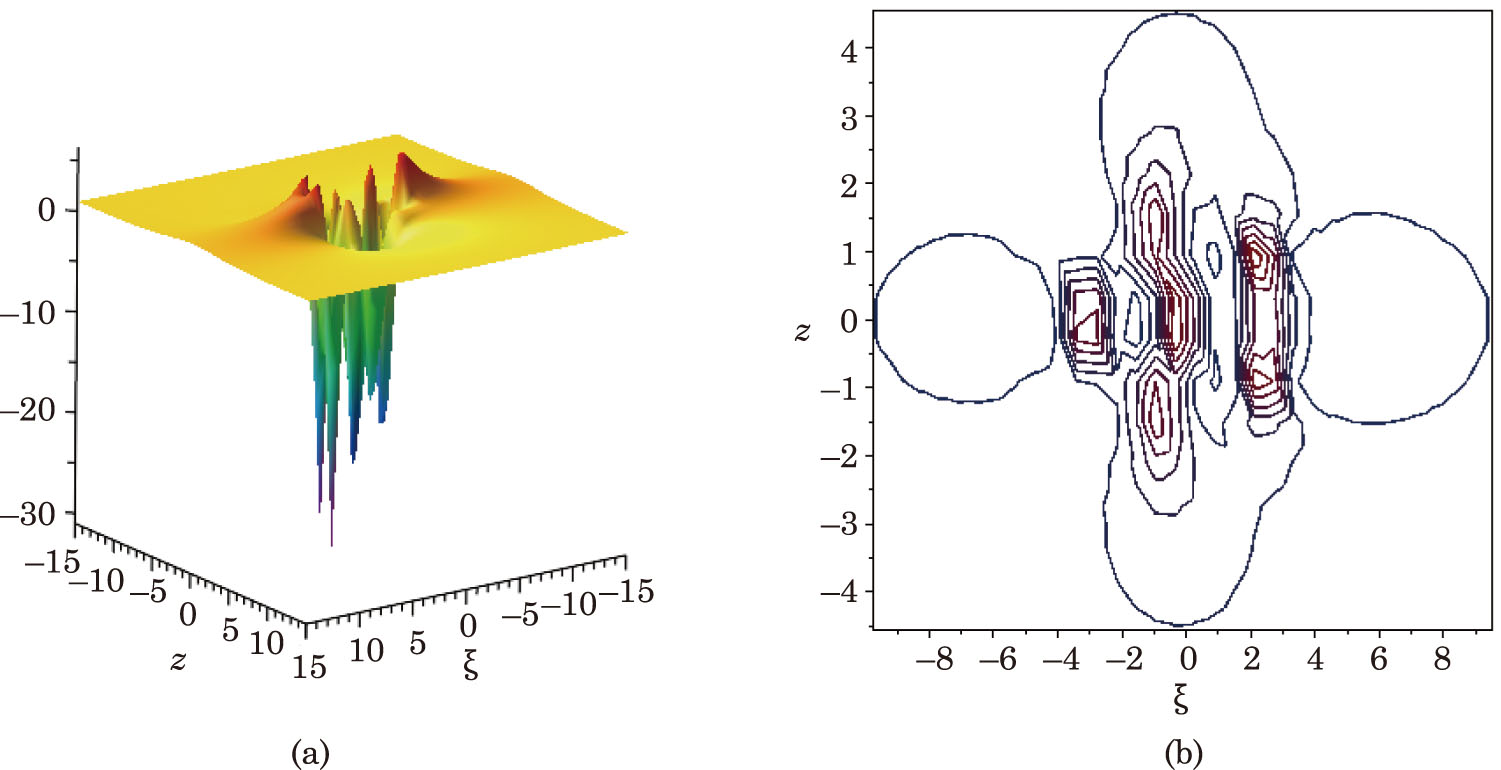
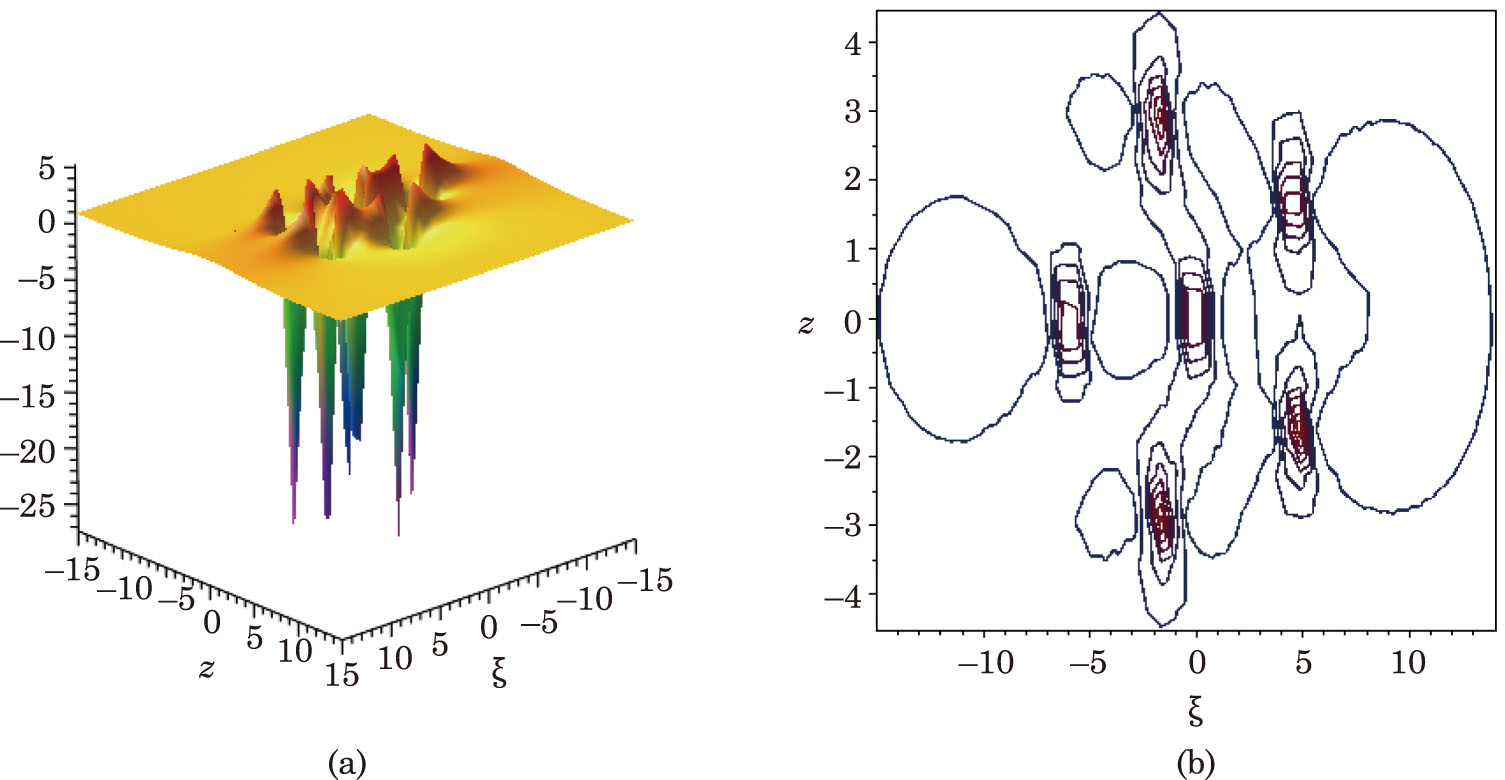 | Fig. 7 The third order rogue wave evolution graph (a) and contour plot (b) for Eq. ( |
5 Conclusion
In this paper, the generalized (3+1)-dimensional nonlinear wave equation in liquid with gas bubbles (
Reference
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | |
| 17 | |
| 18 | |
| 19 | |
| 20 | |
| 21 | |
| 22 | |
| 23 | |
| 24 | |
| 25 | |
| 26 | |
| 27 | |
| 28 | |
| 29 | |
| 30 | |
| 31 | |
| 32 | |
| 33 | |
| 34 | |
| 35 | |
| 36 | |
| 37 |