{kind=link}
{kind=link}
Exact Interaction Solutions of an Extended (2+1)-Dimensional Shallow Water Wave Equation
Cite this Article
Wang Yun-Hu, Wang Hui, Zhang Hong-Sheng, Chaolu TEMUER. Exact Interaction Solutions of an Extended (2+1)-Dimensional Shallow Water Wave Equation. Communications in Theoretical Physics, 2017, 68(2): 165 
Permissions
Exact Interaction Solutions of an Extended (2+1)-Dimensional Shallow Water Wave Equation
† Corresponding author. E-mail:
Abstract
Abstract
Applying the consistent Riccati expansion method, the extended (2+1)-dimensional shallow water wave equation is proved consistent Riccati solvable and the exact interaction solutions including soliton-cnoidal wave solutions, solitoff-typed solutions are obtained. With the help of the truncated Painlevé expansion, the corresponding nonlocal symmetry is also given, and furthermore, the nonlocal symmetry is localized by prolonging the related enlarged system.
1 Introduction2 ) can be reduced to the breaking soliton equation.[20–23] With the help of the Hereman’s simplified method, Ref. [19] derived the multiple-soliton solutions of Eq. (2 ). In Ref. [24], the bilinear form, N-soliton solutions, Lax pair, bilinear BT, Darboux covariant Lax pair, and infinite conservation laws of Eq. (2 ) are presented by means of the binary Bell polynomial and Hirota bilinear method. To our knowledge, the soliton-cnoidal wave solutions, solitoff-typed solutions, nonlocal symmetry, and consistent Riccati solvability for Eq. (2 ) have not been reported.
The investigation in finding the exact solutions of nonlinear evolution equations (NLEEs) is important for the understanding of nonlinear phenomena in various fields of science, especially in physics. For example, the nonlinear wave phenomena observed in fluid dynamics, plasma, and optical fibers are often modelled by the bell-shaped sech solutions and the kink-shaped tanh solutions.[1] Up to now, many powerful and systematic methods have been developed to construct explicit solitary wave solutions for the NLEEs, such as the Darboux transformation (DT),[2–3] the Bäcklund transformation (BT),[4] and the function expansion method.[5] Recently, inspired from the nice results via nonlocal symmetry method,[6–7] Lou proposed the consistent Riccati expansion (CRE) method,[8] which is a lucid and systematic method to construct interaction solutions between different types of nonlinear excitations. Many interaction solutions for NLEEs, for instance, the Boussinesq–Burgers equation,[9] Boiti–Leon–Pempinelli equation,[10] modified KP equation,[11] Sharma–Tasso–Olver equation,[12] breaking soliton equation,[13] Bogoyavlenskii coupled KdV system,[14] higher-order Broer–Kaup system,[15] KdV-mKdV equation,[16] modified Bogoyavlenskii–Schiff equation,[17] coupled mKdV–BLMP system,[18] are discussed in detail.
In this paper, we focus on the following extended (2+1)-dimensional shallow water wave equation


The purpose of this work is to employ the truncated Painlevé expansion, consistent Riccati expansion (CRE) and symbolic computation to study the nonlocal symmetry, BT, consistent Riccati solvability and interaction solutions for Eq. (
2 Consistent Riccati Solvability8 ), we can give the interaction solutions for Eq. (2 ) in the form as
1 ) can be also given as
11 ) and w satisfies Eq. (6 ), we will study some interesting interaction solutions for Eq. (1 ).
As is well-known, investigation of integrability for NLEEs can be regarded as a pre-test and first step of its exact solvability. Among the methods employed to study the integrability of NLEEs, the Painlevé analysis not only can be used to verify the integrability, but also can be used to find exact solutions and other significant properties such as Lax pair and BT.[25–26] Recently, Lou defined the consistent Riccati solvability for NLEEs if it has a consistent Riccati expansion.[8] It has been shown that many more integrable systems are CRE solvable which indicates that the CRE solvable systems are integrable.[8–18]
In the following, we will apply the CRE to Eq. (
For Eq. (


By substituting the expansion (


It is clear that if w is a solution of Eq. (
It is easy to see that the expression (

3 Exact Interaction Solutions1 ) has the following explicit solutions
15 ) and (16 ).18 ) with Eq. (16 ) into Eq. (15 ) and vanishing all the different powers of sn, cn, and dn, we have
17 ) to the following soliton-cnoidal wave interaction solutions by choosing a0 = 0, a1 = a2 = 1, saying
19 ).
It is obvious that once the solutions of w satisfies Eq. (
Substituting Eq. (


It is well known that the explicit solutions of Eq. (




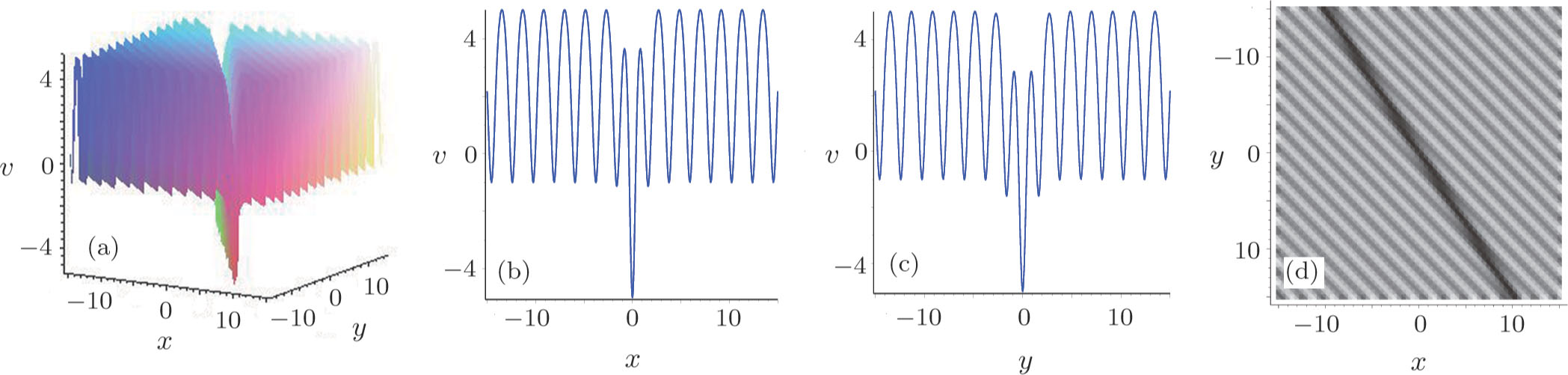
From Fig.
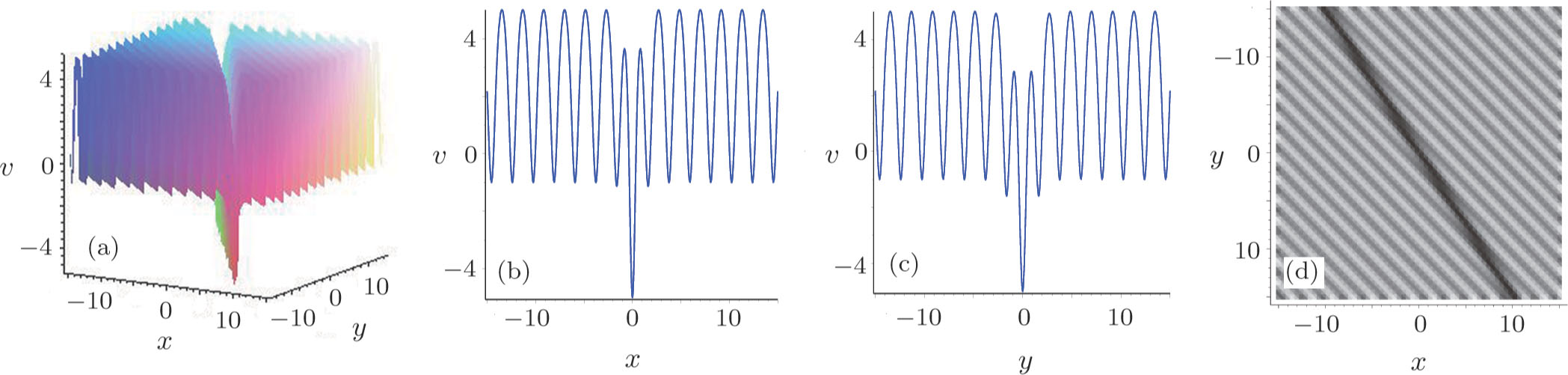 | Fig. 1 Plots of the single soliton on a cnoidal wave background expressed by Eq. ( |
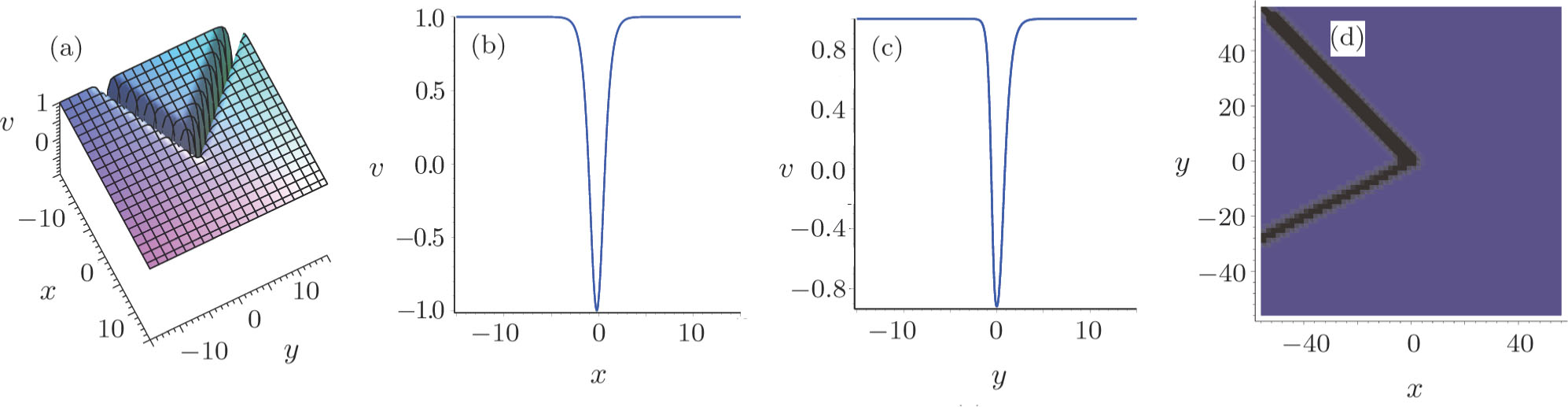
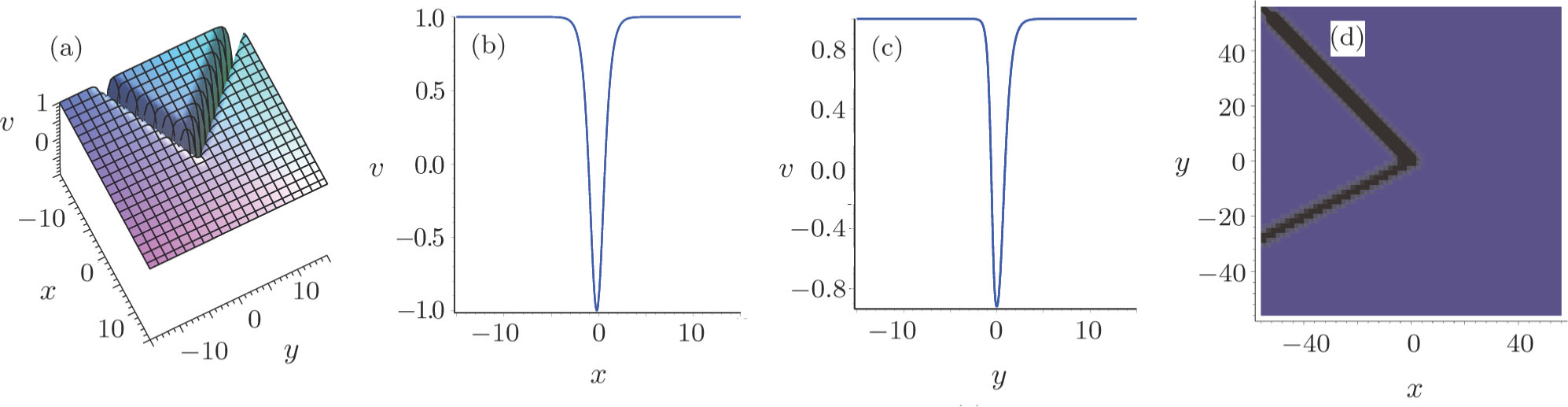 | Fig. 2 Plots of the solitoff-typed solutions expressed by Eq. ( |
4 Nonlocal Symmetry Related to Truncated Painlevé Expansion2 ) reads
2 ) possesses a residual symmetry[32]
27 ) and (30 ), respectively.33 ) of the original system (2 ) becomes Lie point symmetries of the enlarged system including Eqs. (2 ), (30 ), and (34 ), namely
29 ).
One knows that the symmetry method[30–31] is very effective for constructing explicit solutions of NLEEs. In Refs. [6–7], the nonlocal symmetries related to the BT and DT are used successfully to construct the interaction solutions among different types of nonlinear excitation, such as the soliton-cnoidal wave solutions. Recently, it is found that the Painlevé analysis can be also used to find nonlocal symmetries of NLEEs.[32–33] In this section, with the help of the truncated Painlevé expansion method, we will first give a non-auto BT of Eq. (
According to the Painlevé analysis,[25] one can know that Eq. (

Substituting Eq. (


Here, 




From the Theorem



By solving f from Eq. (

Based on the Lie’s first theorem, the corresponding initial value problem of Eq. (
By solving the initial value problem (
Theorem
5 Conclusions
In this paper, we investigate the extended (2+1)-dimensional shallow water wave equation by means of CRE, truncated Painlevé expansion and symbolic computation. On the one hand, by using the CRE method, Eq. (
It has been shown that Eq. (
Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |
| [16] | |
| [17] | |
| [18] | |
| [19] | |
| [20] | |
| [21] | |
| [22] | |
| [23] | |
| [24] | |
| [25] | |
| [26] | |
| [27] | |
| [28] | |
| [29] | |
| [30] | |
| [31] | |
| [32] | |
| [33] | |
| [34] | |
| [35] |