


驻波加速管是由一系列谐振腔组成, 具有固有的震荡频率, 当外加微波的频率与之完全匹配时, 加速管获得最高的能量传递效率。加速管品质因数高, 对频率敏感, 当频率偏离时, 能量传递的效率将迅速下降。
加速管在工作过程中只有百分之几的能量转换为射线, 其余部分转换为热量消散, 在加速器上虽采取有效的热交换措施, 但热量的消散有一个过程, 其时间常数相对于加速器的重复周期来说很大, 也就是说, 在加速器出束过程中, 加速管必然有一个温度升高的过程, 而这个温度的变化造成加速管几何尺寸和形状的微量变化, 这个变化改变了1°加速管的固有震荡频率, 根据经验每变化加速管的固有震荡频率将变化50 kHz, 此时, 若磁控管的频率不变将产生频率匹配的偏离。同样, 磁控管在温度的变化上也有同样的现象, 而且, 当脉冲调制器输出的磁控管阳极电压变化时也会导致磁控管产生的微波频率产生变化甚至跳变。
为消除双方在各种因素下产生的频率偏离, 使用最为广泛的方法是自动锁相频率控制系统(AFC), 这是当前有效的控制系统, 基本满足应用的要求, 但这种系统对频率的偏离范围限制很大, 只能± 100 kHz在范围内, 当频率的偏离超越这个范围时, 系统失效。为了拓展对频率偏离范围限制, 同时提高系统的稳定性和适当降低对其它辅助系统的要求, 让磁控管始终跟随加速管与磁控管的频率偏离是这次设计的主要目标。
在研究鉴相环节产生的误差信号与频率的关系的基础上, 根据频率偏离的情况, 采用分段控制的方法, 跟随匹配点移动, 以达到拓展频率偏离范围的作用。本设计立足于廉价的带8位带A/D转换端口的单片机, 通过精心设计的算法和数据表以实现高速和完善的功能。以下是驻波加速器拓频自动频率控制系统设计的一点探索。
1 微波锁相自动频率控制系统原理分析有驻波加速管的特性表达式:

|
(1) |
式中:Jx-X射线剂量率(cGy/min·n); K-经验常数; I-束流负载(A); V-加速势差, 驻波加速管等效电压(MV); n-常数。其中K、n的值当驻波加速管设计并制造完成后就已确定(常量), 此时影响剂量输出的因素是束流负载和加速能量(变量)。
对Jx=K/Vn两边对时间求导可得:

|
左边除以Jx, 右边除以K/Vn可得:
|
若只是在小范围内变化, 可等效于:
|
(2) |
一直以来, 各种控制方案都是建立在这个公式基础上的。由此公式可知控制剂量率主要由两种方案, 一是直接采样△Jx来控制磁控管调谐器(剂量反馈自动稳频系统); 二是采样△V来控制磁控管调谐器(微波锁相自动频率控制系统)。
反馈自动稳频系统可直接采样△Jx, 由于△Jx受控于两个方面, 一是△I, 二是△V, 这个方案的好处在于可以一定程度的减小△I和△V的累积误差; 但它不能直接反应微波通道或束流负载的工作情况, 不符合模块化设计原则, 而且增加了控制的成本和增加了维修的判断难度。
微波锁相自动频率控制系统因△V不能直接采样, 可根据参数传递方式间接采样。
因V代表的是Pa (当负载电流恒定时呈正比列关系), 可根据关系式:

|
(3) |
式中:P0-微波入射功率(MW); Pa-加速管功率(MV); Q0-加速管固有品质因素; βc-波导与加速管之间的耦合度; f0-加速管固有震荡频率(Hz); △f -加速管工作频率偏移(Hz)。
它的曲线为图 1(其中

|
图 1  |
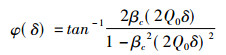
由此得到


|
(4) |
其中:φ(δ)-相位偏移(°)
它的曲线为图 2, 可知φ的变化可以从φ反映出来。此曲线说明:φ-δ存在两个奇点, 对应频率为:△ =± 100 kHz。

|
图 2 φ-δ曲线 |
正向波和反射波通过鉴相环节有关系式:
|
(5) |
其中:A-经衰减后的幅值(V); Ve-混频器输出误差值(V)。若经衰减器把A限定在0.5V, 则它的曲线为图 3:

|
图 3 Ve-δ曲线 |
同样此曲线说明:Ve-δ存在两个奇点, 对应的频率也为:△=± 100 kHz。在两个奇点之内Ve和δ呈一一对应关系, 消除了Ve的差值就消除了δ的差值, 从而实现了频率匹配的功能, 也就获得了最大的剂量的输出, 这就是一般的微波锁相自动频率控制系统的控制理论基础。
2 拓频自动频率控制系统理论基础由和Ve-δ曲线可知, 在两个奇点之内Ve和δ呈一一对应关系, 当频率偏离超越了这个范围时, 到了两个奇点之外, 此时Ve值就有两个δ值与之对应, 在这种情况下, 一般的微波锁相自动频率控制系统失效。
从以上分析可知, 导致在两个奇点之外一般的微波锁相自动频率控制系统失效的原因是δ的多值性, 若能消除这个多值性一般的微波锁相自动频率控制系统就能有效工作。
合并









|
图 4  |
若能在A区和C区时, 调整磁控管频率向O点移动, 使之回到B区, 然后再启动一般的微波锁相自动频率控制系统就能消除的多值性造成的影响。这就是本次设计的拓频自动频率控制系统设计的理论基础。
3 拓频自动频率控制系统设计其中

|
图 5 拓频自动频率控制逻辑框图 |
其中:剂量阀值的高低限的设置是为了可靠地越过奇点。
结构框图:见图 6。为了尽量减少对一般自动频率控制系统结构的改动, 剂量采样在V/F转换前采样保持器保持电压, 再通过Vl, 的读取在保持器之后。选用带10位A/D转换器的单片机, 转换速度在2 μs之内即可。

|
图 6 结构框图 |
验证:验证条件:6 MeV电子直线加速器。磁控管:GLM 5193;重复频率100 Hz; 脉冲电流:106A。
实验方法:人为使磁控管偏离B区, 设定
实验结果见表 1:
|
|
表 1 拓频自动频率控制测试结果 |
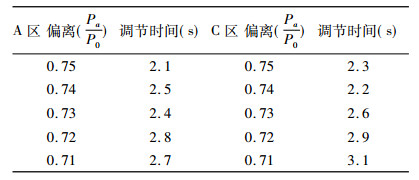
实验结果表明:在超越两个奇点的区域, 通过拓频自动频率控制系统可稳定、可靠地回到最佳频率匹配的位置。
4 结束语本设计建立在理论分析的基础上, 控制系统已经在试验设备上运行, 经运行检验, 在较大范围的温度和脉冲调制输出脉动时均能稳定和可靠的工作, 取得很好的效果。由此说明驻波加速器拓频自动频率控制系统设计合理、有效。
| [1] |
顾本广. 医用加速管[M]. 北京: 科学出版社, 2003.
|
| [2] |
肖明. 自动控制理论对AFC系统性能的数学分析[J]. 沈阳师范学院学报, 2000, 10(1): 32. DOI:10.3969/j.issn.1673-5862.2000.01.010 |
| [3] |
汪叶拾. 雷达自动频率控制系统的设计[J]. 甘肃工业大学学报, 2000, 26(1): 27. |
| [4] |
张永敏. 驻波加速器微波锁相自动频率控制系统理论分析与调整[J]. 医疗卫生装备, 2004(10): 49. DOI:10.3969/j.issn.1003-8868.2004.10.025 |