 2013, Vol. 4
2013, Vol. 4引用本文 |

| 一种改进的SUSAN快速算法在钨矿初选上的应用 |

2. 湄洲湾职业技术学院,福建 莆田 351254
2. Meizhouwan Vocational Technology College, Putian 351254, China
钨是一种宝贵且应用广泛的稀有元素,被称为“工业的牙齿”.我国的钨资源非常丰富,储量居世界第一.长久以来,由于部分大型的钨多金属矿床中的矿石物质成分复杂,嵌布粒度细等特点,致使其选冶技术还没有得到彻底解决,因而现阶段仍然是以石英脉型黑钨矿作为主要的开采对象[1].黑钨矿是提炼钨的最主要矿石,也叫钨锰铁矿.我国的赣南、湘东、粤北一带是世界主要的黑钨矿产区.
目前,预选丢废依旧是脉状黑钨矿选矿的重要工艺,就钨矿床的特点以及近期钨矿工业状况来看,人工手选还是预选丢废的主要手段[2].像重介质选矿、光电选矿等这些机械型的丢废选矿方法也有过生产应用但是效率不高,之后许多工厂对其作了相应的技术改造,如应用动筛跳汰加反手选作业这一方法提高选矿的实际成效.但同时提高了选矿的成本.考虑提高经济效益和提高废石的选出率这两方面的因素,提高合格矿品位是大势所趋.本文提出的SUSAN 快速算法就是在此基础上作为研究出发点,它成本低,效率高.具有很强的实用性.
1 钨矿初选黑钨一般为褐红色至黑色.从黑钨矿的图像即可看出,它在矿石中的分布特征呈现致密状,而且是嵌在白色的石英晶体矿苗之中[3].正因为它的色度特征和纹理特征,为机器视觉技术分选钨矿提供了必要的前提.
机器视觉主要用计算机来模拟人的视觉功能,从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制.基于机器视觉的分选系统主要由图像获取、图像处理和分析及输出显示3 部分组成,它的最大特点就是速度快、信息量大.
图像获取和输出显示可以通过外围的设备实现.图像处理主要是通过特征点提取出边缘,定出钨矿在原矿石中的位置,以便外围机器手精确抓取出来.
2 SUSAN 边缘检测算法SUSAN 算法[4]是最小吸收核同值区(Small Univalue Segment Assimilating Nucleus)英文缩写,它是英国牛津大学S.M.Smith 和J.M.Brady 在1997 年提出的一种关于灰度图像处理的算法.它具有简单、有效、抗噪声能力强,可以去除图像中的部分噪声[5].适用于图像中边缘的检测.
SUSAN 算法采用一种圆形模板在图像上移动(如图 1 所示),将位于圆形窗口模板中心等待检测的像素点称为核心点.把模板内部每个图像的像素点的灰度值与核心点的灰度值进行比较,其差值在小于某个阈值,则认为灰度相同或相近,把符合这种条件的所有像素组成的区域称为吸收核同值区(Univalue Segment Assimilating Nucleus,USAN).
 |
| 图 1 圆形模板的几种典型位置 |
图 1中,a,b,c,d,e 是模板在图像中的典型位置.由图 1 可知,在模板完全处在图像或背景的区域中时,USAN 区域面积最大,如模板c 和e;当模板的中心位于边缘时,USAN 区域面积是最大值的一半,如模板b; 当模板越靠近边缘时,USAN 的区域面积就越小[6],如模板d;当模板中心位于角点时,USAN 区域面积最小,如模板a.通过USAN 区域面积,就可以反映图像局部特征的强度,USAN 区域越小的边缘特征就越明显.故可以设定一个几何阈值,通过查找小于这个阈值的图像像素点,即可确定为边缘点,这就是SUSAN 算法原理[7].
由于图像的数字化处理技术不能得到真正的圆形模板,所以在SUSAN 算法中使用近似圆当做模板.主要的模板有3×3、5×5、7×7 或37 像素等[8].考虑到边缘点判定结果更准确、稳定和明显,本文采用37 像素模板分析.如图 2 所示.
 |
| 图 2 37 像素的圆形模板 |
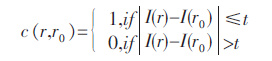
在检测图像边缘过程中,采用选定的模板来扫描整幅待测图像,通过计算模板内的每一个像素点与核心点的灰度差值,并与设定好的灰度差阈值t 作比较,来判断该像素点是否属于USAN,判别公式(1)如下:
|
(1) |
式(1)中,c(r,r0 )表示模板中被检测的像素点是否属于USAN 区域像素的判别函数,I(r0)和I(r)分别表示模板中的核心点和其它任意点的灰度值,t 为设定的灰度差阈值.
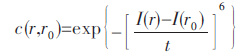
在实际计算中,可采取式(2)相似判别函数[6]来代替式(1):
|
(2) |
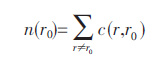
经过式(2) 的判别,USAN 区域的大小可通过式(3)计算得到.式(3)如下:
|
(3) |
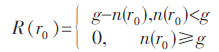
将式(3)计算出来的区域n(r0)大小与预先设定的几何阈值g 作比较,小于g 则说明检测的像素点是一个边缘点.响应函数如下:
|
(4) |
R 称为响应函数,g 称为几何阈值.g 的值一般取0.5 nmax(nmax为模板的最大USAN 值).在一些含噪的图像当中,且核心点在边缘附近时,g 的值一般取0.75 nmax.
由式(4)得到的边缘响应值大小符合SUSAN 算法的思想,即USAN 区域值越小,被测图像边缘的响应就越大.
3 改进的SUSAN 快速算法 3.1 灰度差阈值t 和几何阈值g 的选取由上述的SUSAN 算法思想可知,在SUSAN 算法里,灰度差阈值t 和几何阈值g 非常重要.几何阈值 g 决定了检测点的尖锐度,g 越小提取到的边缘点就越尖锐[9].本文在设计程序时,g 值取3nmax/4.灰度差阈值t决定了能检测到最小的对比度和噪声点的去除程度.t越小,表明检测到的点就越小,但有可能漏检;t 越大,会可能误检.对于不同灰度值的图像,对t 的要求不一样,这里给出一种自适应阈值t 的选取方法:
|
(5) |
式(5)中:Iimax和Iimin分别表示图像中最大的和最小的 i 个灰度值,n 一般取5~10,a 表示比例系数,一般取0.15~0.30[10].
3.2 SUSAN 快速算法的改进SUSAN 算法的思想,需要对所有的像素点计算 USAN 值.实际上绝大部分图像的边缘都可以看成是近似垂直边缘、水平边缘、左斜边缘、右斜边缘4 种类型,如图 3 所示.所以不管是哪一种边缘类型,都可以以边缘点为中心作一条直线段,通过比较两端的像素点的灰度值,如果相等,说明这条直线段与边缘的方向一致,即重合.而其他方向上两者的像素灰度值差值会较大[11].
 |
| 图 3 近似边缘示意图 |
根据这个特点,提出一种快速算法先对图像的边缘进行大致地定位: 首先,以每一个像素点为中心,在其两个垂直方向上作一直线段,计算两端的灰度值差; 其次,通过与给定的差值阈值Thr 进行比较,来判定是否属于候选边缘点或边缘相邻点.最后利用SUSAN 算法对候选边缘点做进一步的定位[8].计算公式是:
|
(6) |
式(6)中,I1 (r)表示垂直图像边缘在图像背景中的像素值,I2 (r)表示垂直图像边缘在图像中的像素值.当二者的差值大于Thr 时,表示检测的像素点是候选边缘点I(r),小于Thr 的点则认为是在图像内部,可以剔除.
以37 像素模板为例,SUSAN 算法加速之前,要判断边缘点需要做36 次的灰度比较减法运算和37次的USAN 值加法运算.在算法加速后,只需要做2次灰度比较的减法运算,以及1 次与差值阈值比较的减法运算,共计3 次减法运算就能剔除1 个像素[8].候选边缘点虽然多了3 次运算,但考虑到检测的图像区域内部像素很大,所以依旧能够大大减少总体的计算量[12].
4 试验结果为验证本文算法在钨矿初选上的有效性,在酷睿2.7 GHz,内存2 GB 的计算机上进行试验.用Visual C++6.0 编写程序实现.
本文的圆形模板采用37 像素.首先依次对其进行背景估计,灰度变换,通过计算自适应阈值t,几何阈值g 此处取27,最后根据快速算法思想提取图像边缘.与传统的一些边缘检测算法对比,分别在正常情况下、含常见噪声环境下对钨矿图像进行边缘检测,试验结果如图 4、图 5、图 6 所示,原始钨矿图像中白色部分表示可能含有钨的矿苗,这是需要留下的,而灰色的即为围岩需要丢弃的.
 |
| 图 4 原始钨矿图像检测结果 |
 |
| 图 5 含高斯噪声钨矿图像检测结果 |
 |
| 图 6 含椒盐噪声钨矿图像检测结果 |
由图 4、图 5、图 6 可以看出,与Roberts[13]算法、 Sobel[14]算法、LOG 算法和Canny[15]算法相比,Roberts算法和Sobel 算法对噪声敏感;LOG 算法和Canny算法定位精度不高,容易出现伪边缘;本文提出的算法在检测准确度、抗噪声性能上有明显的优势,表 1总结了这几种算法在性能指标上的对比.通过对比可知,加速后的算法在速度上也具有优势.结果证明在黑钨矿图像边缘选取上,本文的算法准确度高,抗噪性好,提取速度快.这些特点奠定了其在钨矿初选工艺有较好的应用价值.
| 表1 几种算法的性能指标比较 |
 |
| 点击放大 |
5 结束语
针对钨矿初选过程中黑钨矿图像的特征,在分析 SUSAN 算法边缘检测方法的基础上,对SUSAN 算法做了相应地加速及改进.这种新提出的算法不需梯度的计算,具有算法简单、定位准确、抗噪声能力强等特点,提高了算法效率和时间,可提高图像边缘检测的效果,从而实现钨矿初选的有效算法.但如果要实际应用到工业过程中,需要结合DSP 硬件系统的要求,用基于Visual C++语言的软件设计平台把算法融合到系统当中,这将作为下一步的研究工作重点.
| [1] | 罗仙平, 路永森, 张建超, 等. 黑钨矿选矿工艺进展[J]. 金属矿山, 2011(12): 87–90. |
| [2] | 林海青. 近20年来我国钨选矿技术的进展[J]. 中国钨业, 2001, 16(11): 5–6. |
| [3] | 肖玲玲, 谢斌, 赵秀鸟. 一种基于改进SUSAN算子的钨矿初选算法[J]. 江西理工大学学报, 2011, 32(3): 30–32. |
| [4] |
Smith S M, Brady Y M. SUSAN-A new approach to low level image processing[J].
Journal of Computer Vision, 1997, 23(1): 45–78. DOI: 10.1023/A:1007963824710. |
| [5] | 罗忠亮. 基于改进SUSAN算子的图像边缘检测算法[J]. 重庆工学院学报: 自然科学, 2009, 23(5): 102–106. |
| [6] | 刘博, 仲思东. 一种基于自适应阈值的SUSAN角点提取方法[J]. 红外技术, 2006, 28(6): 331–333. |
| [7] | 马桂珍, 房宗良, 姚宗中. SUSAN边缘检测算法性能分析与比较[J]. 现代电子技术, 2007, 247(8): 189–191. |
| [8] | 邵泽明, 朱剑英, 王化明. 基于SUSAN算法的分层快速角点检测[J]. 华南理工大学学报: 自然科学版, 2006, 34(7): 65–67. |
| [9] | ZHOU Dong-xiang, LIU Yun-hui, CAI Xuan-ping. An efficient and robust corner detection algorithm[C]//Intelligene Control and Atuomation, Portugal: Conference Publications, 2004: 4020-4024. |
| [10] | 席志红, 刘利彬, 许新利. SUSAN角点检测算法改进[J]. 应用科技, 2006, 33(9): 29–32. |
| [11] | 肖玲玲, 赵秀鸟. 一种基于数学形态学与改进的SUSAN算子边缘提取快速算法[J]. 微型机与应用, 2009, 28(23): 76–78. |
| [12] | 赵秀鸟. 基于机器视觉的钨矿初选算法研究[D]. 赣州: 江西理工大学, 2009: 44-46. |
| [13] | Roberts L G. Machine perception of three-dimension solid[M]. Cambridge: MIT Press , 1965: 159-197. |
| [14] | Sobel L. Camera models and machine perception[M]. Stanford: Stanford University , 1970. |
| [15] |
Canny J. A computational approach to edge detection[J].
Pattern Analysis and Machine Intelligence, 1986, 8(6): 679–698. |