 2017, Vol. 50
2017, Vol. 50文章信息
- 王新普, 杨军, 陈杰军, 贺继峰
- WANG Xinpu, YANG Jun, CHEN Jiejun, HE Jifeng
- 一种超导磁储能装置控制方法
- A control method for superconducting magnetic energy storage device
- 武汉大学学报(工学版), 2017, 50(2): 220-227
- Engineering Journal of Wuhan University, 2017, 50(2): 220-227
- http://dx.doi.org/10.14188/j.1671-8844.2017-02-010
-
文章历史
- 收稿日期: 2016-05-20






2. 湖北省电力公司,湖北 武汉 430061
2. Hubei Electric Power Company, Wuhan 430061, China
随着高压输电的发展,远距离输电、大区域电网互联将成为未来电网的主要模式.因此,电网的控制运行将变得更加复杂,也更容易遭受扰动.近年来,高温超导的出现以及电力电子技术的快速发展,使超导储能装置展现较好的应用前景.超导磁储能装置能够在系统发生故障时快速发出或吸收有功及无功功率,提高系统的稳定性及快速响应的能力[1].超导磁储能装置工作性能受控制器影响较大,其控制方式一般包括外环控制和内环控制2个层次[2, 3]:外环控制作为主控制器根据系统功率波动向内环提供有功和无功功率补偿指令,内环控制用于实现VSC(Voltage Source Converter, VSC)输出调制电压的控制,通过对调制电压基波分量的准确控制,使VSC交流侧实际输出电流的id、iq分量快速跟踪外环控制输出的电流参考值[4].目前,关于SMES控制策略的研究工作主要包括PID控制、H∞鲁棒控制、自适应神经元控制等[5-7].文献[8]在单机无穷大系统中建立SMES的电力系统非线性鲁棒模型,并利用反馈线性化方法对系统进行线性化处理,最后利用H∞鲁棒控制理论设计SMES装置的非线性鲁棒控制器.文献[9]通过提取转子角速度和机端电压偏差,采用非线性比例-积分-微分(Nonlinear Proportion-Integral-Differential,NLPID)设计SMES控制器,分别生成其变流器脉宽调制比M和触发角α实现对SMES输出功率的控制.文献[10, 11]提出采用模糊逻辑控制SMES, 并与传统PI控制方法进行比较,验证2种不同方法对系统稳定性的影响.以上文献较少考虑发生连续故障时,控制器的性能变化对系统稳定性的影响.
自适应动态规划控制方法(ADP)能够对电力系统的功率、频率、稳定性进行有效控制,实现在线学习和自适应调整参数,是一种较好的优化控制方案[12-14].这种采用人工神经网络的自适应控制方法[15, 16]不需要系统的具体模型,可以并行协同处理多个输入信号,通过强化学习在循环中改进控制率,且具有记忆能力.本文基于BP神经网络结合动态规划进行SMES控制器的设计,提出了一种基于执行依赖启发式动态规划(ADHDP)智能算法的超导储能外环控制方法,该方法能够通过利用神经网络的记忆能力来强化学习并自适应调整结构参数,对于电网连续故障时的系统稳定性问题有着较好控制效果.
1 超导磁储能装置模型根据功率调节系统(Power Conditioning System, PCS)的不同拓扑结构,可以将SMES分为电压源型超导储能装置(VSMES)和电流源型超导储能装置(CSMES)[17].VSMES采用电压源型变流器,VSC技术在可靠性、成熟性、经济性以及自身的体积、重量和损耗等方面均优于电流源型变流器(Current Source Converter, CSC),也表现出良好的应用前景,因此采用VSC作为功率调节系统的VSMES也得到了广泛的应用.如图 1所示,本文采用VSMES作为研究对象.

|
| 图 1 电压源型SMES结构图 Figure 1 The diagram of voltage source type of SMES |
根据基尔霍夫定律,在功率不变的原则下VSC在同步旋转dq坐标系下的结构图如图 2所示.

|
| 图 2 同步旋转坐标系下VSC结构框图 Figure 2 The diagram of VSC under synchronous rotating coordinate system |
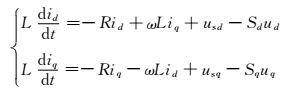
图 2中, Usd、Usq分别为VSC交流侧3相电压在dq坐标系下的电压,id、iq分别为VSC交流侧3相电流在dq坐标系下的电流,Sd、Sq分别为3相桥臂的开关函数经过park变换至dq坐标系下的开关函数,Ud为直流侧母线电压,iL为流入斩波器的电流.由图 2可知
 (1)
(1)
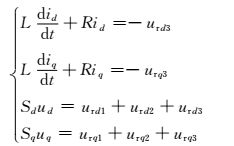
为消除dq轴之间的电流耦合,分别引入电流状态反馈和电网电压前馈,即令urd2=ωLiq、urq2=-ωLid,urd1=usd、urq1=usq,有下式:
 (2)
(2)
通过式(2) 即可实现dq轴电流的独立控制.图 3为超导磁储能装置的控制原理图.

|
| 图 3 超导磁储能装置功率控制原理图 Figure 3 Power control principle diagram of SMES |
 (3)
(3)
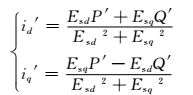
通过式(3) 可知,外环控制提供参考功率指令Pref、Qref,SMES与系统交换的功率Psm、Qsm,两者共同作为外环输入量并通过内环控制,实现SMES 4象限功率跟踪补偿.
2 ADHDP控制器设计传统的动态规划用于解决最优问题时,采用倒推的向后算法进行求解,对实时控制问题并不适用.自适应动态规划采用时间向前的方法,在系统当前控制策略选定的状态下,利用神经网络预测未来最优代价.该算法在“策略改进程序”和“值确定运算”之间循环[18],在第k时刻给定一个控制律cl相对应的代价函数J(·, cl),可得一个改进的控制律cl+1:
 (4)
(4)
式中:U为状态为xk、控制信号为uk时的效益函数,在该控制律下满足J(xk, cl+1)≤J(xk, cl),直到收敛至最优控制律.
代价函数的更新规则为
 (5)
(5)
通过2个更新运算确定最优控制律和相应的最优代价函数.
自适应动态规划进行最优控制时,需要对最优性能指标函数进行估计,取系统性能指标函数为
 (6)
(6)
式中,γ是折扣因子,本文取为0.95.
2.1 ADHDP模型ADHDP的基本结构图如图 4所示,包含评价网络和执行网络2个部分.

|
| 图 4 ADHDP的结构图 Figure 4 Structure diagram of ADHDP |
对式(6) 的最优性能指标函数利用ADHDP进行估计,需要构造BP神经网络的误差函数.取评价网络的误差为
 (7)
(7)
式中:
 (8)
(8)
因此,最小化式(7) 定义的误差函数,即可获得对式(6) 的一个最佳估计.
2.2 控制器设计ADHDP结构简单,不需要被研究对象的具体模型,仅通过提取系统的当前以及之前时刻的状态,通过BP神经网络训练逼近最优性能指标函数,同时输出最优控制信号,能够有效解决复杂非线性问题.
本文研究的对象为连续故障下,ADHDP控制器对系统稳定性的影响.以单机系统为例,控制器的原理图如5所示.

|
| 图 5 ADHDP控制器原理图 Figure 5 The principle diagram of the ADHDP controller |
图 5中状态量选取:
 (9)
(9)
式中:x(t)代表发电机状态量.
图 5中,u(t)为执行网络输出的控制信号,本文中为参考功率指令值Pref、Qref;输出J(t)为性能指标函数.
评价网络输出用来逼近最优性能指标函数,Wc表示评价网络的权值.由梯度下降法对网络权值进行更新:
 (10)
(10)
 (11)
(11)
其中,Lc为评价网络的学习率.
执行网络输出最优控制信号,实现系统最优控制,执行网络的训练以最小化
 (12)
(12)
 (13)
(13)
其中,La为执行网络的学习率.
利用S函数强大的建模功能,在Simulink中实现ADHDP控制器的设计,强化信号选取为状态量的函数:
 (14)
(14)
ADHDP采用BP神经网络进行训练,学习率选取对于系统收敛速度和收敛效果有较大影响,选取合适的学习率能够设计具有更好控制效果的控制器.
本文中自适应学习率的更新规则[19]:
 (15)
(15)
式中:l(k)表示第k次循环时的学习率;SSE(k)表示相应的误差.ADHDP控制器的控制流程如图 6所示.

|
| 图 6 ADHDP控制器程序流程图 Figure 6 The flow chart of ADHDP controller program |
为验证上述自适应动态规划智能控制器的有效性,本文分别在单机系统和2机系统中设置故障进行仿真实验.
3.1 单机系统如图 7所示,在单机无穷大系统中设置连续故障,验证ADHDP控制器性能.图 7中发电机容量为200 MVA,通过一个210 MVA、13.8 kV/230 kV的变压器连接到无穷大母线上,SMES连接在发电机出口处.

|
| 图 7 含SMES的单机无穷大系统 Figure 7 A single machine infinite bus system with SMES |
在无穷大母线侧设置一个3相连续性故障,故障发生时间为7.1 s和13.1 s,持续时间均为0.1 s.控制器的输入量选择:

即分别为当前时刻、前一时刻和前2个时刻系统输送至无穷大母线的功率.本文只对系统的有功功率利用ADHDP进行控制.在固定学习率和自适应学习率情况下分别研究ADHDP对系统暂态稳定性的影响,仿真结果如图 8~10所示.

|
| 图 8 连续故障下发电机角速度 Figure 8 The motor angular velocity under continuous faults |

|
| 图 9 连续故障下输送至无穷大母线功率 Figure 9 The power transmitted to infinite bus under continuous faults |

|
| 图 10 连续故障下发电机端电压 Figure 10 The generator terminal voltage under continuous faults |
图 8为连续故障下发电机转子角速度振荡曲线,图 9为在SMES接入系统后发生连续故障时输送到无穷大母线的功率,图 10为相应故障下机端电压变化曲线.从图 8~10可以看出,在系统发生连续故障的情况下,ADHDP控制器能够在线学习,并有记忆能力,在第2次故障的情况下获得比第1次更好的控制效果,且自适应学习率ADHDP比固定学习率ADHDP具有更好的控制性能.由于在故障发生时刻控制器对系统是没有认知的,当学习率固定时,控制器不能进行最优训练,因此故障刚开始发生时系统的振荡较为明显.在对学习率进行自适应控制后,能够使系统快速平抑振荡.
3.1.2 ADHDP与PI控制方法比较在相同的故障条件下,分别比较PI控制方法和自适应学习率ADHDP控制方法对系统暂态稳定性的影响,仿真结果如图 11~13所示.

|
| 图 11 不同控制方法下发电机角速度响应曲线 Figure 11 Generator angular velocity response curve under different control methods |

|
| 图 12 不同控制方法下输送至无穷大母线功率 Figure 12 The power transmitted to infinite bus under different control methods |

|
| 图 13 不同控制方法下发电机端电压 Figure 13 The generator terminal voltage under different control methods |
从图 11~13可以看出,在故障状态下SMES在PI控制和ADADP控制下都能够快速平抑系统波动,提高系统暂态稳定性.并且,不同的控制方法对于SMES的性能影响较为显著.传统的PI控制SMES能够有效平抑系统的波动,但是在连续故障情况下,PI控制方法对系统的稳定性影响相同.基于自适应学习率的ADHDP控制方法较PI控制有较明显的优势,同时,ADHDP控制方法能够记忆对系统有利的控制策略,在连续故障下,可以获得比上次更好的控制效果.
3.2 2机系统如图 14所示,为验证所提控制器在单机系统和多机系统均适用,本节在2机系统中设置连续短路故障,发电机容量分别为192、128 MVA,通过双回线连接成环路并与无穷大母线连接.连续故障设置在节点8和9之间,3相故障发生时间为0.1 s和6.1 s,持续时间均为0.2 s.超导磁储能装置接在发电机1机端母线处.采用自适应学习率ADHDP控制器和PI控制器分别对故障系统中的SMES进行控制,分析不同场景下系统的稳定性.

|
| 图 14 含SMES的2机系统 Figure 14 A two machines system with SMES |
在2机系统中,ADHDP控制器的输入量为

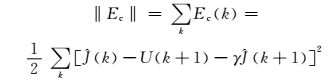
即分别为当前时刻、前一时刻和前2个时刻发电机1和发电机2的转子角速度.ADHDP控制器输入量选择较为灵活,同时可以有多个输入量,且可以把系统历史数据作为控制器输入,提高了控制器对系统不同时刻的信息挖掘.图 15~17为不同场景下反映系统稳定性的状态变量曲线图.图 15为系统的动能曲线图,系统暂态动能表达式:

|
| 图 15 不同控制方法下动能响应曲线 Figure 15 The total kinetic energy response curve under different control methods |

|
| 图 16 不同控制方法下发电机间功角差 Figure 16 Difference of generator power angle under different control methods |

|
| 图 17 不同控制方法下发电机1输出功率 Figure 17 The output power of generator 1 under different control methods |
式中:Wtotal为系统总动能; Ji为发电机i的转动惯量; ωmi为发电机i的转子角速度; N为发电机总台数.
从图 15~17可以看出,在系统发生故障状况下,SMES能抑制系统的振荡,但不同的控制器对系统稳定性的影响区别较为明显.ADHDP控制器对于连续故障有自适应学习能力,系统第1次故障时,ADHDP控制器有效抑制系统的振荡,较PI控制器有明显优势,但ADHDP控制器在初次学习时,对系统是没有认知的,表现在第1次故障时系统状态曲线有锯齿形的小波动,在第2次故障时,各状态量输出曲线较为平滑,ADHDP控制器的性能较前一次有显著提高.在连续故障情况下,ADHDP控制器均获得比PI控制器更好的控制效果,与单机系统的仿真结果一致,证明了ADHDP控制器的优越性.
4 结束语超导磁储能装置能够在系统发生故障时快速发出或吸收有功及无功功率,提高系统的稳定性及快速响应的能力.本文基于BP神经网络,结合动态规划进行SMES控制器的设计,提出了一种基于执行依赖启发式动态规划智能算法的超导储能外环控制方法,该方法能够通过利用神经网络的记忆能力来强化学习并自适应调整结构参数;基于ADHDP的记忆功能,在MATLAB环境下利用S函数设计了SMES控制器,并在Simulink中进行了仿真验证,仿真计算结果表明:
1) 在系统故障时,超导储能装置能够快速进行功率补偿,有效提高系统暂态稳定性.
2) 连续故障情况下,基于自适应学习率的ADHDP控制比固定学习率的ADHDP控制能够更快平抑系统振荡,获得更好的控制效果.
3) 不同的控制方法对SMES的性能影响显著,ADHDP比PI控制能够获得更好的控制效果.同时,基于ADHDP的记忆功能,ADHDP能够在连续故障下获得比上次更好的控制效果.
| [1] |
樊冬梅. SMES储能装置提高电力系统暂态稳定性研究[D]. 杭州: 浙江大学, 2008.
Fan Dongmei. Research of superconducting magnetic energy storage device for enhancement power system transient stability [D]. Hangzhou: ZhejiangUniversity, 2008. |
| [2] |
陈星莺, 刘孟觉, 单渊达. 超导储能单元在并网型风力发电系统的应用[J].
中国电机工程学报, 2001, 21(12): 63–66.
Chen Xingying, Liu Mengjue, Shan Yuanda. Application of superconducting magnetic energy storage system-SMES in wind power system of network-forming[J]. Proceedings of the CSEE, 2001, 21(12): 63–66. DOI:10.3321/j.issn:0258-8013.2001.12.015 |
| [3] |
姚涛. 超导磁储能装置控制策略研究[D]. 武汉: 华中科技大学, 2006.
Yao Tao.The study on the control of superconducting magnetic energy storage[D]. Wuhan: Huazhong University of Science and Technology, 2006. http://cdmd.cnki.com.cn/Article/CDMD-10487-2008022675.htm |
| [4] |
沈阳武, 彭晓涛, 孙元章. 背靠背双PWM变流器的协调控制策略[J].
电网技术, 2012, 36(1): 146–152.
Shen Yangwu, Peng Xiaotao, Sun Yuanzhang. Study on cooperative control strategies of back-to-back dual-PWM converter[J]. Power System Technology, 2012, 36(1): 146–152. |
| [5] | Wang Li, Lee ShinMuh, Huang ChingLien. Damping sub-synchronous resonance using superconducting magnetic energy storage unit[J]. IEEE Transactions on Energy Conversion, 1994, 9(4): 770–775. DOI:10.1109/60.368329 |
| [6] |
孙元章, 卢强. 电力系统鲁棒非线性控制研究[J].
中国电机工程学报, 1996, 16(6): 361–365.
Sun Yuanzhang, Lu Qiang. On the study of power system nonlinear robust control[J]. Proceedings of the CSEE, 1996, 16(6): 361–365. |
| [7] |
李艳, 程时杰, 潘垣. 超导磁储能系统的自适应单神经元控制[J].
电网技术, 2005, 29(20): 57–61.
Li Yan, Cheng Shijie, Pan Yuan. Adaptive single neuron based control for superconducting magnetic energy storage unit[J]. Power System Technology, 2005, 29(20): 57–61. DOI:10.3321/j.issn:1000-3673.2005.20.011 |
| [8] |
关天祺, 梅生伟. 超导储能装置的非线性鲁棒控制器设计[J].
电力系统自动化, 2001, 25(17): 1–6.
Guan Tianqi, Mei Shengwei. Nonlinear robust control design for power system including superconducting magnetic energy storage devices[J]. Automation of Electrical Power Systems, 2001, 25(17): 1–6. DOI:10.3321/j.issn:1000-1026.2001.17.001 |
| [9] |
彭晓涛, 程时杰, 王少荣, 等. 非线性PID控制器在超导磁储能装置中的应用研究[J].
电网技术, 2005, 29(5): 37–42.
Peng Xiaotao, Cheng Shijie, Wang Shaorong. Application research on nonlinear PID controller in superconducting magnetic energy storage[J]. Power System Technology, 2005, 29(5): 37–42. |
| [10] | Khanna R, Singh G, Nagsarkar T K. Power system transient stability improvement with fuzzy controlled SMES[C]// 2012 International Conference on, Advances in Engineering, Science and Management (ICAESM), 2012:703-708. |
| [11] | Hemeida A M. A fuzzy logic controlled superconducting magnetic energy storage, SMES frequency stabilizer[J]. Electrical Power and Energy Systems, 2010, 80(6): 651–656. DOI:10.1016/j.epsr.2009.10.021 |
| [12] | Tang Yufei, He Haibo, Ni Zeng, et al. Reactive power control of grid-connected wind farm based on adaptive dynamic programming[J]. Neuro-computing, 2014, 125(1): 125–133. |
| [13] | Sui Xianchao, Tang Yufei, He Haibo, et al. Energy-storage-based low-frequency oscillation damping control using particle swarm optimization and heuristic dynamic programming[J]. IEEE Transactions on Power Systems, 2014, 29(5): 2539–2548. DOI:10.1109/TPWRS.2014.2305977 |
| [14] | Tang Yufei, He Haibo, Wen Jingyu, et al. Power system stability control for a wind farm based on adaptive dynamic programming[J]. IEEE Transactions on Smart Grid, 2015, 6(1): 166–177. DOI:10.1109/TSG.2014.2346740 |
| [15] |
王永骥, 涂建.
神经元网络控制[M]. 北京: 机械工业出版社, 1998: 122-128.
Wang Yongji, Tu Jian. Neuron Network Control[M]. Beijing: Machinery Industry Press, 1998: 122-128. |
| [16] |
王宁, 涂健, 陈锦江. 自适应神经元网络的智能控制[J].
信息与控制, 1992, 21(4): 235–239.
Wang Ning, Tu Jian, Chen Jinjiang. Adaptive neural network intelligent control[J]. Information and Control, 1992, 21(4): 235–239. |
| [17] | Iglesias I J, Acero J. Comparative study and simulation of optimal converter topologies for SMES systems[J]. IEEE Trans on Applied superconductivity, 1998, 5(2): 254–257. |
| [18] |
林小峰, 宋绍剑, 宋春宁.
基于自适应动态规划的智能优化控制[M]. 北京: 科学出版社, 2013: 44-66.
Ling Xiaofeng, Song Shaojian, Song Chunning. Intelligent Optimization Control Based on Adaptive Dynamic Programming[M]. Beijing: Science Press, 2013: 44-66. |
| [19] |
丛爽.
面向MATLAB工具箱的神经网络理论与应用[M]. 合肥: 中国科学技术大学出版社, 2009: 64-72.
Cong Shuang. Neural Network Theory and Application for MATLAB Toolbox[M]. Hefei: University of Science and Technology of China Press, 2009: 64-72. |