



为了能对复杂的近壁流动进行机理性研究,一直以来,水动力学工作者都在努力探索能够对壁面剪应力进行直接精细测量的方法。然而,物体近壁湍流流动具有时间和位置的不确定性,流动结构尺度小,生命周期短,且对外界扰动极为敏感。这些特性对测试和辨识技术提出了很高的要求,使用当前的研究工具对复杂近壁的流场尤其是精细壁面剪切应力场的直接测量非常困难[1-2]。近年来,微机电系统(MEMS)的出现为壁面剪应力的直接测量提供了可能,MEMS与传统测量仪器相比具有诸多优点:测量元件尺度微小,空间分辨率高,对流动的干扰小;利用传感器阵列可以对流动中的物理量进行分布式测量;传感器响应快,时间分辨率高,能提供关于壁面动量传递和总体流动状态的详细信息。因此MEMS传感器是测量壁面剪应力的理想工具。
目前已有的MEMS壁面剪应力传感器主要有浮动单元式、热传递式、流动阻塞式传感器,以及基于超声波和光学的其它MEMS传感器[3-4]。其中,基于热传递的热膜传感器体型小、应用广、发展快[5]。热膜式壁面剪应力传感器主要基于对流换热的原理[6],当电流加热敏感单元产生的热能在不同流动情况下(壁面剪应力)通过对流散热的形式转移到流场中,引起热敏电阻阻值的变化而表征出壁面剪应力。目前,最新的热膜式壁面剪应力传感器已能实现剪应力大小和方向的实时检测。随着防水及相关后处理工艺的不断进步,MEMS壁面剪应力传感器不仅能够在空气介质中使用,而且也逐渐具备了在水中应用的潜力,从而可以发挥更大的作用[7]。
热膜式MEMS传感器用于水下壁面剪应力测量的显著特征是以阵列的规模进行布置运行,可以高效率直接对壁面剪应力实现定量、大面积的测量。而且,利用由整块柔性基板和敏感单元制成的阵列[8]还能够方便地测量曲面上的壁面剪应力。
瞄准水下壁面剪应力精细测量,本文课题组进行了一系列的系统开发测试工作。目前,已在精密水槽中实现了对MEMS传感器阵列在较高雷诺数下的标定试验技术开发[9-12]。在MEMS壁面剪应力传感器水下实际应用之前(如对装有传感器阵列的suboff潜艇标模在拖曳水池中进行拖曳试验以测量壁面剪应力)需要先进行一组平板检测验证试验。本文即是对平板MEMS测量壁面剪应力研究工作的总结。通过平板系列试验完成了对MEMS传感器阵列的实验评估,验证了MEMS传感器阵列水下壁面剪应力测量的精度,为后期的水下应用试验奠定了基础。
1 水下平板壁面剪应力MEMS测量实验系统开发 1.1 平板模型设计对于测量壁面剪应力而言,使用平板模型有较好的相关理论基础,能够大大简化传感器阵列的安装和试验程序,因此用其作为定量测量壁面剪应力的实验平台。
本试验平板模型选用的材料为抗锈铝,其前缘为长轴短轴比10:1的半椭圆,后缘为长宽比10:1的楔形,中段为平行段。如图 1所示(其中尺寸单位为mm)。模型整体长(L)×宽(W)×厚(H)=1000mm×150mm×20mm。其中传感器阵列安装位置中心距前缘800mm,平板模型前缘和后缘部分分别抛光以平稳过渡到平行段,从而确保模型周围的流动平顺。

|
| 图 1 用于壁面剪应力检测试验的平板模型 Fig.1 Schematic of the flat plate model for WSS benchmark tests |
水下MEMS壁面剪应力传感器阵列由8个彼此间距为6.3mm的热膜式MEMS敏感单元组成,沿流向成行排列并集成在整块柔性基板上,如图 2所示(其中尺寸单位为μm)。其整体尺寸长为70mm,宽50mm,总厚度为75μm。各单元尺寸长为3mm,宽0.55mm。

|
| 图 2 水下MEMS壁面剪应力传感器阵列(西工大) Fig.2 MEMS sensors array for underwater WSS measurement calibration (courtesy of NPU) |
由于MEMS热膜式壁面剪应力传感器的输出信号是带有基础电压的微弱电压信号,无法通过放大器直接放大的方法实现高精度测量。因此课题组提出了在输出信号放大前增加信号平衡环节,在保留有效信号的前提下减小基础电压,再通过放大的方法实现其高精度测量,有效解决了MEMS热膜式壁面剪应力传感器微弱信号检测的难题,如图 3所示。

|
| 图 3 热膜式传感器阵列数据采集框图(加平衡环节) Fig.3 Data acquisition diagram of hot-film sensor array(with the OBS) |
为实现整个输入电压范围内电压分辨率都高于1mV,采用分档调节方法,实现了二分之一至全电压范围内1024级可调。对应3档电压的可调范围分别为0.375~0.75V、0.625~1.25V、0.8125~1.625V,电压档位越小,可调精度越高,3档精度分别为0.4、0.6和0.8mV。
传感器在恒定电流(CC)模式下运行,由独立的50mA精确直流恒流源驱动。MEMS信号采集处理系统由NI-PXIE-1062Q主机、NI-PXIE-8135控制器及NI-PXI-4462数据采集卡组成,以获得每个传感器的输出信号。在标定和应用之前,需要测得每个MEMS传感器的电阻温度系数(TCR),对于T0 = 20℃,平均基础阻值为25.5Ω,测得的电阻温度系数(TCR)变动范围为3850±100ppm/℃。
2 平板边界层流动参数估计与CFD仿真分析在开展MEMS传感器测量平板壁面剪应力实验之前,需要先对边界层参数使用经验公式进行估算预判,以和MEMS测量结果进行对比验证,评估标定与测量结果的准确性。
依据平板边界层流动状态的不同,经验公式估算可以分为层流和湍流2大类。
对于层流边界层采用Blasius解[13]来计算壁面剪应力值:
 (1)
(1)
层流边界层厚度:
 (2)
(2)
对于湍流边界层,本文分别采用了4种经验公式进行壁面剪应力计算,并对计算结果取平均值,包括有Prandtl’s power-law公式、对数剖面公式、Schultz-Grunow公式和Kestin and Persen公式,具体如下:
(1) Prandtl’s power-law:
 (3)
(3)
(2) 对数剖面公式:
 (4)
(4)
(3) Schultz-Grunow:
 (5)
(5)
(4) Kestin and Persen:
 (6)
(6)
而基于边界层厚度的雷诺数和基于流动距离的雷诺数有如下关系:
 (7)
(7)
其中:
 (8)
(8)
 (9)
(9)
结合公式(3)~(9) 可对平板壁面剪应力进行经验公式估算。
在实验之前还对水下平板流动进行了CFD仿真模拟,考虑到节省计算资源和绕流平板流场的对称性,本文仅对平板绕流流场的一半进行数值计算,计算域宽度为实验段宽度的一半,计算域长度和高度与实验段保持一致。物理模型和网格与边界条件设置如图 4和5所示,以v=0.7m/s为例,平板上的壁面剪应力分布如图 6所示。从图 6可以看出,平板壁面剪应力由前端往后不断降低。在平板的去流段,截面沿流动方向持续变大,造成流动与边界分离。相应地,引起平板去流段壁面剪应力发生不规则变化。

|
| 图 4 物理模型示意图 Fig.4 Computational model diagram |

|
| 图 5 计算网格与边界条件类型 Fig.5 Computation mesh and boundary condition |

|
| 图 6 v=0.7m/s平板壁面剪应力云图 Fig.6 Contours of wall shear stress distribution(v=0.7m/s) |
MEMS传感器的标定试验在精密校验水槽中进行,标定原理和方法在文献[10]有详细描述。传感器采用恒流供电方式工作,标定公式为:
 (10)
(10)
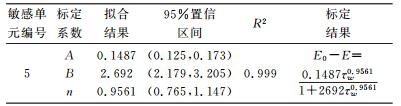
式中:E0是水速为0或者没有壁面剪应力输入时的电压值,ΔE是有壁面剪应力作用在传感器上时的电压差值,E、E0、τw均为试验测得,A、B、n是标定系数,在相同温度下为常值。
将壁面剪应力数据作为输入信号,电压测量数据作为输出信号,通过标定公式(10) 建立输入输出之间的关系。设置偏差函数


|
| 图 7 5号热敏单元标定曲线 Fig.7 Calibration curve of No.5 sensor element |
对MEMS传感器阵列壁面剪应力的直接测量进行了重复性试验。传感器输出电压的信号平均值来计算平均壁面剪应力,以5号敏感单元为例,测量结果如表 2所示。

通过激光多普勒测速仪(LDV)获得平板上的边界层速度剖面,利用速度剖面法间接计算出平板上的壁面剪应力值来对比验证MEMS测量结果。
激光多普勒测速仪(LDV)包括Flow Explorer激光系统和BSA信号处理单元,并配备了用于速度测量焦距为500mm的光学镜头以及用于测量体积定位范围为1000mm×300mm的高精度坐标架。如图 8所示为LDV的布置图,LDV镜头安装在水槽下方的高精确坐标架上,垂直向上打光。激光光线通过水槽底板进入测试区域,并且聚焦在目标区域上[14]。LDV获取流场信息的大小和位置如图 8虚线框所示。

|
| 图 8 LDV的布置图(边界层速度剖面测量) Fig.8 LDV arrangement for detection of boundary layer velocity profiles |
将LDV测得低流速下的速度剖面测量结果与Blausis解[14]进行比较,如图 9所示。速度剖面的横坐标采用无量纲长度参数


|
| 图 9 低流速下速度剖面与Blausis解的比较 Fig.9 Velocity profiles for lower freestream velocities compared with Blausis |
高流速的速度剖面与Spalding经验公式[15]进行对比,如图 10所示。

|
| 图 10 高流速度下速度剖面与Spalding速度剖面的比较 Fig.10 Velocity profiles for higher freestream velocities compared with Spalding |
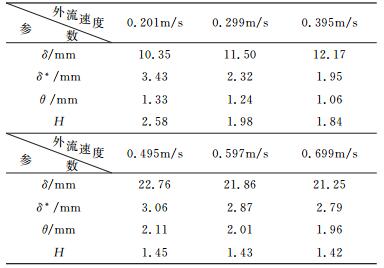
由流体力学相关知识可知,当流体流经固体壁面时,会在壁面附近形成速度梯度明显的流动薄层即边界层。本文根据测得的速度剖面分别计算了边界层厚度、形状因子等流动参数。边界层厚度通常是指从壁面开始到沿壁面切向流向速度达到自由来流速度99%的位置高度。边界层动量厚度和边界层位移厚度分别从边界层动量损失情况和质量损失情况对边界层进行了描述。在有压力变化的湍流边界层中,通常用形状因子H=δ*/θ来对速度剖面进行描述。在本次平板试验中,由LDV测得的不同来流速度下的基本流动参数[16]如表 3所示。
对各工况下的边界层特征参数进行计算[17],对于湍流边界层的壁面剪应力通过拟合求解获得相应的虚拟原点y0[18-20]和壁面摩擦速度uτ以及无量纲y0+值,其中

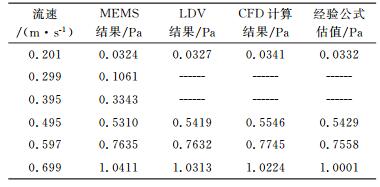
将MEMS直接测量结果与LDV间接式测量结果、CFD计算结果以及经验公式计算结果进行对比,比较结果如表 4和图 11所示(以MEMS传感器阵列的5号敏感单元为代表进行分析)。
|

|
| 图 11 壁面剪应力测量和经验估值结果比较 Fig.11 Comparison of WSS among measurement results and empirical estimations |
实验结果表明LDV速度剖面法用于壁面剪应力的测量具有较高的精度,与经验公式的差别在4%以内,LDV测量能为水下MEMS壁面剪应力测量评估提供理想的基准。使用标定后MEMS传感器直接测量的结果与LDV速度剖面法的结果相差不超过4%,与经验公式之间的差值也在5%以内。这说明MEMS的标定和测量具有足够高的可靠性,可供水下壁面剪应力的精细测量。
4 结论与展望基于新开发的MEMS传感器阵列对水下平板壁面剪应力进行了直接测量,同时使用LDV测量平板边界层速度剖面外推出壁面剪应力以及利用CFD仿真和经验公式法对边界层参数进行了估算,以便于对测量结果进行相互验证评估。该系列平板试验为后期的水下测量应用奠定了基础。
新开发的MEMS传感器阵列能够直接测量壁面剪应力从而反映出复杂的水下壁面物理流场,测量具有较高精度。可以预期,MEMS测量技术将会对流动精细测量与控制起到重要的促进作用。
| [1] | Haritonidis J. The measurement of wall shear stress[J]. Advances in Fluid Mechanics Measurements, 1989: 229–261. |
| [2] | Naughton J W, Sheplak M. Modern developments in shear-stress measurement[J]. Progress in Aerospace Sciences, 2002, 38(6): 515–570. |
| [3] | Etebari A. Recent innovations in wall shear stress sensor technologies[J]. Recent Patents on Mechanical Engineering, 2008, 1(1): 22–28. DOI:10.2174/2212797610801010022 |
| [4] | Löfdahl L, Gad-el-Hak M. MEMS-based pressure and shear stress sensors for turbulent flows[J]. Measurement Science and Technology, 1999, 10(8): 665. DOI:10.1088/0957-0233/10/8/302 |
| [5] | Crafton J W, Fonov S D, Jones E G, et al. Measurements of skin friction in water using surface stress sensitive films[J]. Measurement Science and Technology, 2008, 19: 075801. DOI:10.1088/0957-0233/19/7/075801 |
| [6] | 肖同新, 马炳和, 邓进军, 等. 基于柔性热膜传感器的流体壁面剪应力测量系统[J]. 传感器与微系统, 2013, 32(7): 101–105. Xiao T X, Ma B H, Deng J J, et al. Fluid wall shear stress measurement system based on flexible hot film sensor[J]. Transducer and Microsystem Technologies, 2013, 32(7): 101–105. |
| [7] | Natarajan V, Kathiresan M, Thomas K A, et al. MEMS sensors for underwater applications[J]. Micro and Smart Devices and Systems, 2014: 487–502. |
| [8] | Ma B, Ren J, Deng J, et al. Flexible thermal sensor array on PI film substrate for underwater applications[C]. Micro Electro Mechanical Systems (MEMS), IEEE 23rd International Conference on IEEE, 2010, 679-682. |
| [9] | Tian Y K, Xie H, Huang H, et al. Calibration of MEMS shear stress sensors array in water flume for underwater applications[C]//Proceedings of the 11th International Conference on Hydrodynamics (ICHD 2014). Nanyang Technological University, Singapore, 2014. |
| [10] | 田于逵, 谢华, 黄欢, 等. MEMS壁面剪应力传感器阵列水下标定实验研究[J]. 实验流体力学, 2015, 29(2): 8–12, 25. Tian Y K, Xie H, Huang H, et al. Calibration research of MEMS shear stress sensor array[J]. Journal of Experiments in Fluid Mechanics, 2015, 29(2): 8–12, 25. |
| [11] | 黄欢, 孙海浪, 田于逵, 等. 水下MEMS剪应力标定试验压力监测方案设计[C]. 全国水动力学学术会议暨全国水动力学研讨会, 2014: 501-506. Huang H, Sun H L, Tian Y K, et al. Pressure monitor project design of under water MEMS shear stress cabibration test[C]. Proceedings of National Congress on Hydrodynamics & National COnference on Hydrodynamics, 2014: 501-506. |
| [12] | 黄欢, 孙海浪, 田于逵, 等. 水下MEMS壁面剪应力传感器标定方案仿真分析与实验验证[J]. 实验流体力学, 2016, 30(2): 79–83, 102. Huang H, Sun H L, Tian Y K, et al. CFD analysis and experimental validation on the scheme of calibration for MEMS wall shear stress sensors array for underwater applications[J]. Journal of Experiments in Fluid Mechanics, 2016, 30(2): 79–83, 102. |
| [13] | Blasius H. Grenzschichten in flussikeiten mit kleiner reibung[J]. Z Angew Math Phys, 1908: 56. |
| [14] | Tian Y K, Shen X, Sun H L, et al. Experimental verification of wall shear stress measurement with MEMS sensors array for underwater applications with flat plate benchmark tests[C]//Proceedings of the 12th International Conference on Hydrodynamics (ICHD 2016), Delft University of Technology, Delft, Netherlands, 2016. |
| [15] | Spalding D B. A single formula for the "law of the wall"[J]. Journal of Applied Mechanics, 1961, 28(3): 455–458. DOI:10.1115/1.3641728 |
| [16] | Schlichting H. Boundary layer theory[M]. 7th ed, McGraw-hill Series in Mechanical Engineering, ISBN 0-07-055334-3, 1979. https://www.researchgate.net/publication/244981858_Schlichting_H_Boundary-Layer_Theory_Transl_by_J_Kestin_7th_ed_McGraw-Hill_Series_in_Mechanical_Engineering_New_York-St_Louis-San_Francisco-Auckland-Bogota-Dusseldorf-Johannesburg-London-Madrid-Mexico- |
| [17] | White F M. Viscous fluid flow[M]. 2nd ed. New York: McGraw-hill, 1991. |
| [18] | Kendall A. A method for estimating wall friction in turbulent boundary layer[C]//Proceedings of 25th AIAA Aerodynamic Measurement Technology & Ground Testing Conference, San Francisco, 2006. https://www.researchgate.net/publication/304067624_Transition_in_Hypersonic_Boundary_Layers_Role_of_Dilatational_Waves |
| [19] | 王光华, 刘宝杰, 刘涛, 等. 利用PIV技术对平板湍流边界层的实验研究[J]. 自然科学进展, 1999, 9(12): 1198–1203. Wang G H, Liu B J, Liu T, et al. Experimental study of the turbulent boundary layer using PIV[J]. Progress in Natural Science, 1999, 9(12): 1198–1203. |
| [20] | 潘光, 黄桥高, 胡海豹, 等. 基于热线技术的脊状表面湍流边界层流动参数测试方法研究[J]. 测控技术, 2009, 28(4): 18–24. Pan G, Huang Q G, Hu H B, et al. Research about the testing method of flow parameters of turbulent boundary layer over riblet surface based on hot wire technology[J]. Measurement & Control Technology, 2009, 28(4): 18–24. |