



二维激光粒子图像测速技术(Two-Dimensional Particle Image Velocimetry,2D-PIV)因其非接触、全流场测量的优势,经过三十多年的发展,已经成为一种标准的流场测试技术,被广泛应用于基础实验流体力学、仿生流体力学、空气动力学、燃烧和叶轮机械等诸多研究领域[1-4]。然而基础研究及工程应用中的诸多流动现象本质上具有强烈的三维特性,某一平面的流场数据并不足以剖析复杂的流场物理本质。因此长期以来,研究者们致力于发展各种全场三维流动测试技术。
基于双目视觉原理,早期研究者提出了Stereo-PIV技术。该技术尝试通过在2D-PIV的基础上增加1台相机来实现平面内3速度分量的测量(2D-3C)[5-6]。由于Stereo-PIV仅能提供流场某一切面内的3速度分量测量,研究者们将扫描片激光与高速相机结合起来,实现短时间内对多个流场切面的速度测量[7-8]。受限于激光速度、相机速度或者扫描镜片的速度,这种称之为Scanning PIV技术的最大测量速度一般低于1m/s[9]。另一方面,数字离焦PIV技术(Defocusing Digital PIV,DDPIV)则利用光阑(如Three-aperture mask)来获得粒子离焦图像,进而根据所形成的3个离焦图像来计算单个粒子的空间位置。通常单相机DDPIV系统仅能测量粒子浓度非常低的流场,因此一般需要3台相机来获得比较精确的测量结果[10-11]。全息PIV (Holographic PIV,HPIV)是一种能够真正测量流场全三维速度分布的技术,其通过同轴或者离轴的方式将粒子全息图像记录在胶片或者数字全息板上,进而通过全息重构和三维互相关(或者三维粒子跟踪)来获得粒子三维速度[12-14]。然而HPIV技术极其复杂的光路布置以及较小的测量区域(受限于现有CCD/CMOS分辨率)等缺陷限制了其广泛的应用。层析PIV (Tomographic Particle Image Velocimetry,Tomo-PIV)是当前最为成熟、应用最为广泛的三维速度场测试技术之一,该技术通常采用4~8套相机从不同的角度记录粒子图像,并通过基于MART的重构算法和三维互相关获得全三维速度场分布[9, 15]。Tomo-PIV具有空间分辨率高、较大测量体积的优势(沿光轴方向测量范围一般小于垂直于光轴方向的测量范围),但需要较多的光学窗口。数字合成孔径PIV (Synthetic Aperture PIV, SAPIV)是另外一种使用多相机配置的三维流场测试技术,其通常采用8~15台相机组成的阵列来记录粒子光场图像,并通过合成孔径重聚焦算法来重构粒子三维图像[16]。SAPIV可以处理比Tomo-PIV粒子浓度更高的流场,且其光轴方向的测量范围能达到与垂直光轴方向测量范围同等大小的水平,很明显其最大的缺陷在于复杂且昂贵的相机阵列系统。
前面所述的三维PIV测试技术要么采用复杂的光路布置(如HPIV),要么需要多相机系统(如Tomo-PIV,SAPIV),不但提高了实验难度、增加了硬件成本,更为重要的是极大地限制了这些技术在受限光学空间下的应用。倘若能用单台相机实现三维流场测量,将能极大简化实验难度,推进实验流体力学的进一步发展。以此为出发点,近期发展的一种单相机三维流场测试技术通过在相机前加装三棱透镜,来实现单CCD记录3个不同视角粒子图像的功能[17]。采用与Tomo-PIV类似的重构和互相关处理,这种技术可以测量1个较小体积内的三维速度分布。另一方面,2005年左右发展成熟的光场成像技术为新一代单相机三维流动测试技术提供了另一种选择[18-19]。特别是斯坦福大学Ng Ren博士利用现有高分辨率相机成功地开发出了世界上首台紧凑型光场相机,并随后将其科研成果市场化,推出了Lytro品牌的光场相机[20]。然而Lytro相机是面向消费级市场的一款光场相机,虽然实现了拍摄后重新对焦及多重视角切换,但是并不具备双曝光这一PIV测量所必需的功能,因此不适合用作三维流场测量。前期研究者也仅是尝试使用Lytro相机来实现示踪粒子三维重构的基本功能[21-22]。几乎与此同时,2010年成立的德国Raytrix公司则推出了面向工业级市场的光场相机[23]。该公司的某些型号相机具备双曝光功能,同时提供了简单的流场测量软件。美国密歇根大学Volk Sick教授课题组曾经尝试使用Raytrix公司的R29相机测量汽车发动机缸内三维瞬态流场。然而由于Raytrix公司的三维粒子重构算法仅适用于示踪粒子浓度极低的情况,导致必须使用大量三维示踪粒子跟踪的结果叠加之后方能获得1个矢量浓度较高的“伪”瞬态三维流场[24]。根据作者与Volker Sick教授课题组交流发现,由于Raytrix公司的相机硬件结构、微透镜参数以及重构算法对终端用户是封闭的,使得使用者无法基于Raytrix公司所拍摄的光场图像开发适用于不同流场情况的三维粒子重构算法。
基于以上分析,本文作者及美国Brian Thurow研究团队分别开发了各自的光场相机硬件系统和光场重构算法[25-28]。我们将其称为Light Field Particle Image Velocimetry (LF-PIV),该技术与基于相机阵列的SAPIV技术在硬件配置上有着根本的不同。LF-PIV使用高分辨微透镜阵列(Microlens Array, MLA)与高分辨率CCD精密封装组成的单台光场相机来记录粒子4D光场(见下文第1章介绍)图像,并通过光场重聚焦、光线追迹等方法来重构粒子三维图像[26-27]。尽管LF-PIV技术的研究处于刚刚起步的阶段,但其紧凑硬件系统、与2D-PIV类似的简洁实验步骤和全三维瞬态速度场测量的优势,已经引起了流体力学研究者的广泛兴趣。
本文系统地阐述LF-PIV的系统构成,包括具有自主知识产权的首套高分辨光场相机硬件系统、基于MART的光场粒子图像重构算法、基于密集光线追迹的数字光场图像合成技术。同时分别利用基于DNS射流流场所生成的数字合成图像、水槽射流实验图像,将LF-PIV技术与自主搭建的四相机Tomo-PIV系统进行详细的对比。
1 自主高分辨光场PIV系统 1.1 自主高分辨光场相机光场“Light Field”的概念由Arun Gershun于1936年首次提出,是指空间传播光线的集合[29]。每1根空间光线的辐射能量L建模为以下5D光场方程[30]:
 (1)
(1)
式中:(x, y, z)和(θ, ϕ)分别指光线的空间和角度坐标(见图 1(a))。

如果只考虑光线在不透明模型外部传输的情况,则5D光场方程可以简化为如下4D光场方程[30-31]:
 (2)
(2)
式中:(u, v)和(s, t)分别是光线与2个平行平面相交点的坐标(见图 1(b))。
基于上述4D光场方程,开发了具有自主知识产权的光场PIV相机,即通过微透镜阵列与CCD精密封装的方式来记录4D光场,CCD与MLA相对位置关系如图 2所示,简化起见,图中所示为一维示意图。图中符号含义分别为:z轴为相机光轴,从相机内部指向外部;y轴为相机对焦平面,其与z轴的焦点为坐标原点;dz、dy分别为点光源偏离光轴和焦平面的距离;So物距;Si像距;VB光线相对于主光轴的偏移量;fm主镜头焦距;fl微透镜焦距;pm主镜头孔径;pl微透镜孔径;pp像素直径;Sx, Sy单个微透镜中心相对于主光轴的偏移量;yl光线相对于单个微透镜中心的偏移量;yCCD光线抵达CCD后相对于主光轴的偏移量。

光场相机硬件系统的研发主要包含2方面的工作:(1)选择合适的高分辨CCD;(2)设计高分辨微透镜阵列。因为单台光场相机需要同时记录光线的强度和空间位置,所以CCD的分辨率越高,对光线空间位置和角度的采样精度就越高。尽管市场上单反照相机(DSLR)的分辨率越来越高(如Mamiya Phase One iXR的有效分辨率高达80 Megapixel, Canon EOS 5D Mark III的分辨率达到了50.6 Megapi-xel),但是这些高分辨CCD无法用于搭建光场PIV相机,因为其2帧之间的时间间隔长达几十甚至上百毫秒。首台光场相机搭建于2014年12月,当时市场上分辨率最高的PIV相机为Imperx B6640,其采用了KAI-29050 CCD传感器(6600pixel×4400pixel)。据作者所知,目前更高分辨率的PIV相机为Imperx T88H0,其采用1片KAI-47051 CCD传感器,分辨率高达8880pixel×5304pixel。
如果说CCD传感器的选择主要受限于市场现有产品,那么微透镜阵列的设计则是分辨率、加工精度和成本综合权衡的结果。一方面微透镜阵列的分辨率越高,对光线位置和角度的采样精度也就越高。而市场上可供选择的微透镜阵列的分辨率通常只有数百个微透镜单元。加工分辨率更高的微透镜阵列不但价格高昂,且加工技术、精度要求极高。另一方面,微透镜单元的形状(通常为正方形和六边形)对光场相机的分辨率影响极大;同时微透镜个数与CCD像素个数的比值(Pixel Microlens Ratio,PMR)也极大地影响光场相机的平面分辨率和景深分辨率。通过前期研究分析[28],最终采用了六边形单元、分辨率为410×310的微透镜阵列。自主高分辨光场相机实物如图 3所示。图 4展示了原始光场图片以及经过光场渲染所得到的重聚焦和视角变换图片。

|
| 图 3 自主光场相机系统 Fig.3 In-house light field camera system |

|
| 图 4 原始光场图片及光场渲染效果 Fig.4 Raw light field image and results of refocusing and perspective shift processing |
光场相机中CCD与MLA相对位置以及光线追迹原理如图 2所示(简单起见,仅示意一维的情况),流场示踪粒子所发出光线经主镜头、微透镜后,最终到达CCD的位置可以根据高斯光学准确地计算出来[32]。光线在不同阶段的空间位置可以由公式(3)~(7)进行计算。
位于O点的粒子发出的光线到达主镜头后的空间位置:
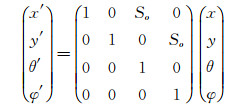 (3)
(3)
位于O点的粒子发出的光线穿过主镜头后的空间位置:
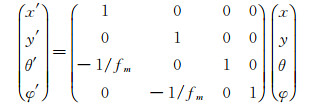 (4)
(4)
位于O点的粒子发出的光线到达微透镜阵列后的空间位置:
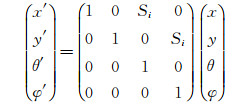 (5)
(5)
位于O点的粒子发出的光线穿过微透镜阵列后的空间位置:
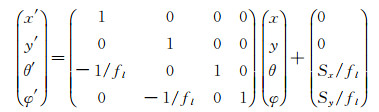 (6)
(6)
位于O点的粒子发出的光线到达CCD平面后的空间位置:
 (7)
(7)
基于以上公式,就可以利用随机产生的示踪粒子空间位置,在给定相关光学参数数值后(见表 1),产生系列粒子光场图像。该光场图像合成平台可以非常便利地用于分析光场相机分辨率特性,或者根据已知流场数据,产生粒子光场图像对,用于评估LF-PIV技术的测量精度。
| 符号 | 意义 | 相机参数 | 合成图像参数 |
| nlx | MLA x方向分辨率 | 410 | 410 |
| nly | MLA y方向分辨率 | 310 | 310 |
| pl | 微透镜单元直径 | 77μm | 77μm |
| fl | 微透镜焦距 | 310μm | 310μm |
| npx | 相机x方向分辨率 | 6600pixel | 6600pixel |
| npy | 相机y方向分辨率 | 4400pixel | 4400pixel |
| pp | 像素直径 | 5.5μm | 5.5μm |
| fm | 主镜头焦距 | - | 50mm |
| pm | 主镜头孔径 | - | 25mm |
| So | 物距 | - | 100mm |
| Sl | 相距 | - | 100mm |
| M | 放大系数 | - | -1 |
| (f/#)m | 主镜头f数 | - | 2 |
| (f/#)l | 微透镜f数 | - | 4 |
前期研究表明,MART可以较为准确地重构粒子光场图像[26-27]。其基本步骤类似于Tomo-PIV的MART重构,给定体素(Voxel)的1个初始估计值(一般为1),然后根据记录的像素值和权重系数,根据公式(8)循环迭代计算粒子体素值。
 (8)
(8)
式中:E(Xj, Yj, Zj)为第j个体素的值;I(xi, yi)为第i个像素的值,可以从记录的光场图像中读取;wi, j为权重系数,表示第i个像素接受来自于第j个体素光线强度的百分比。LF-PIV粒子图像重构计算与Tomo-PIV最大的不同在于权重系数的计算方法。Tomo-PIV重构算法采用圆柱-立方体模型来计算权重系数[15],然而这种方法并不适用于LF-PIV重构。因为Tomo-PIV中每个像素的视线是根据相机校准矩阵来唯一确定的,而LF-PIV中每个像素接受到来自空间不同位置的光线。
根据光场成像的独特性,提出了基于密集光线追迹的重构系数计算方法。对于某一体素,追迹其被微透镜阵列离散的光束(离散光束的数目取决于微透镜单元所对应像素的个数,图 5(a)仅展示了2条光束),首先计算这些光束与相交微透镜单元的重叠面积(见图 5(b)),获得权重系数w1。然后继续追迹光束至CCD平面,并计算这些光束与相交像素的重叠面积(见图 5(c)),获得权重系数w2。最终权重系数即为w1与w2的乘积。

为了验证LF-PIV技术的精确度,同时也开发了Tomo-PIV数字图像合成平台,并自主搭建了Tomo-PIV系统用于对比研究分析。Tomo-PIV数字图像合成平台的功能与光场图像合成平台类似,根据已知流场数据,产生系列多相机Tomo-PIV粒子图像,用于验证重构、互相关算法,并对比分析LF-PIV的测量精度。其主要步骤为:(1)根据针孔相机模型产生相机矩阵;(2)随机产生第一幅图像里示踪粒子的空间坐标;(3)根据相机矩阵将粒子位置投射至虚拟CCD平面,获得粒子中心的像素坐标;(4)以粒子像素坐标为中心,根据高斯分布,确定粒子图像的像素值大小;(5)进而根据已知流场,在给定的时间间隔内,对粒子空间位置进行偏移;(6)根据新的粒子空间坐标,重复步骤(3)和(4),生产第二幅粒子图像。
自主Tomo-PIV硬件系统主要包含4台Imperx B2041相机(2048pixel×2048pixel)、4套尼康85mm定焦移轴镜头、2套EPIX E4图像采集卡和LED光源系统。其中相机、移轴镜头和图像采集卡均为市场现有产品,LED光源系统采用Lumins CBT-120芯片,并搭建驱动电路以超过其10倍额定电流瞬间点亮LED芯片,使其在短时间能发出足够强的光线照亮1个约15×15×20mm3的区域[33]。相比于激光,LED光源系统不但价格非常低廉、系统简单紧凑,更加重要的是其安全性远好于激光,完全能满足低速水槽PIV测量的需求。
另外,根据公开文献资料,自主编译了相机自校准[34]、MLOS-MART粒子重构[35]以及多重网格迭代三维互相关代码。考虑到Tomo-PIV图像处理的巨大运算量,所有代码都采用CUDA语言编程,以便于利用NVIDIA GPU实现并行处理,提供计算效率。
3 对比仿真分析为了验证所发展的LF-PIV技术,首先采用DNS射流流场分别生成数字合成光场图片和Tomo-PIV粒子图片(时间间隔为1.6ms)。圆形射流喷管的直径D=20mm,Re=2500。测试区域离喷管距离大约1D处,大小为1.8D×1.2D×0.5D。数字合成Tomo-PIV图像的粒子浓度为0.05ppp (particle per pixel),LF-PIV图像粒子浓度为1ppm (particle per microlens)。Tomo-PIV重构体素为480×320×130voxel,分辨率为0.075×0.075×0.075mm/voxel。LF-PIV重构体素为2200×1466×130voxel,分辨率为0.017×0.017×0.077mm/voxel。所有图像处理均采用NVIDIA Geforce GTX980 GPU并行计算,Tomo-PIV和LF-PIV的重构时间分别为4.75和100s。重构获得的Tomo-PIV三维粒子图像和LF-PIV三维粒子图像均由多重网格三维互相关计算,并用中值滤波和线性插值的方法分别剔除和替代错误矢量。
图 6分别展示了原始DNS流场、Tomo-PIV瞬态流场和LF-PIV瞬态流场数据。该图显示LF-PIV、Tomo-PIV测量结果与原始DNS数据吻合较好,均能准确地重现靠近射流喷管的roll-up结构。为了更加准确地对比LF-PIV和Tomo-PIV的测量精度,图 7展示了2种技术在x-y和x-z方向测量误差的分布。由于在此次测试中,LF-PIV在x-y方向的重构分辨率高于Tomo-PIV,因此LF-PIV在x-y方向的测量精度要高于Tomo-PIV (见图 7(a)和(c))。而由于光场相机在光轴方向的分辨率为x-y方向的十分之一[26],LF-PIV在z方向(光轴方向)的测量误差要高于Tomo-PIV。

|
| 图 6 对比仿真分析结果 Fig.6 Simulation results |

|
| 图 7 LF-PIV和Tomo-PIV的测量误差 Fig.7 Measurement error of LF-PIV and Tomo-PIV |
基于数字合成图像验证了LF-PIV算法的正确性及技术本身的可行性,但并没有考虑实验图像常见的各种缺陷(如图像背景噪声、光照不均匀)。因此开展了水槽低速射流验证实验,利用LF-PIV系统和Tomo-PIV系统同步测量圆管射流,并将瞬态三维速度场进行对比分析。
整个实验系统如图 8所示,4个Tomo-PIV相机(图中红色箭头标识)交叉布置,每台相机使用1个尼康85mm定焦移轴镜头,其视线分别垂直于八边形水槽的1个平面。光场相机使用1台尼康200mm定焦微距镜头以保证其与4个Tomo-PIV相机具有相同的测量区域。其中光场相机的放大系数约为1,Tomo-PIV相机的放大系数约为0.2。5台相机分别通过CamerLink数据线与3张EPIX E4数据采集卡相连,并通过MicroPluse725(北京立方天地)与4套LED光源系统实现同步。流场使用Dantec PSP-50示踪粒子,粒子直径为50μm。水与示踪粒子均匀混合后由水泵输运至整流段,并经过3层由粗至细的滤网后进入圆形射流喷管。喷管的直径为20mm,实验雷诺数Re=2000。测量区域位于喷管上方2.25D的位置,大小为1.9D×1.3D×0.5D。

|
| 图 8 LF-PIV、Tomo-PIV同步测试实验系统实物图 Fig.8 Experimental setup of LF-PIV and Tomo-PIV system |
图 9所示为实验拍摄的1张粒子光场图像(局部放大)。经过MART重构和三维互相关计算,图 10(a)所示为所获得的三维瞬态速度场及景深方向涡量等值面。将其与Tomo-PIV所得瞬态速度场(见图 10(b))比较,发现2种技术测量的流场结构基本一致。

|
| 图 9 实验粒子光场图像局部放大图 Fig.9 Real light field particle image (zoom in) |

|
| 图 10 实验三维瞬态速度场 Fig.10 Instantaneous velocity fields |
本文展示了一种全新的单相机三维流动测试技术LF-PIV,系统阐述了高分辨光场相机的设计和搭建、基于MART的光场粒子重构算法、光场图像合成平台。分别采用数字合成图像和实验拍摄图像,与当前最为先进的三维测试技术Tomo-PIV进行了对比研究分析,结果表明LF-PIV在x-y方向的测量精度完全达到了Tomo-PIV的精度;受限于当前CCD和微透镜阵列分辨率,其在z方向的测量精度稍逊于Tomo-PIV。然而,相较于Tomo-PIV,LF-PIV最大的优势在于利用单台相机、单视角、与2D-PIV类似的简洁实验系统布置,即可获得较为精准的三维流场分布,特别是非常适用于光学空间受限情况下的复杂三维流场测量。
| [1] | Adrian R J, Yao C S. Development of pulsed laser velocimetry (PLV) for measurement of turbulent flow[C]//Int Symposium on Turbulence, University of Missouri, Rolla, 1984. |
| [2] | Raffel M, Willert C E, Wereley S, et al. Particle image velocimetry a practical guide[M]. 2nd ed. Berlin, Heidelberg, New York: Springer , 2007 . |
| [3] | Schroeder A, Willert C E. Particle image velocimetry:new developments and recent applications[M]. New York: Springer , 2008 . |
| [4] | Adrian R J, Westerweel J. Particle Image Velocimetry[M]. Cambridge: Cambridge University Press , 2010 . |
| [5] | Arroyo M P, Greated C A. Stereoscopic particle image velocimetry[J]. Measurement Science and Technology , 1991, 2 : 1181–1186. DOI:10.1088/0957-0233/2/12/012 |
| [6] | Prasad A K, Adrian R J. Stereoscopic particle image velocimetry applied to liquid flows[J]. Experiments in Fluids , 1993, 15 : 49–60. |
| [7] | Brucker C. 3-D Scanning-Particle-Image-Velocimetry:technique and application to a spherical cap wake flow[J]. Applied Scientific Research , 1996, 56 : 157–179. DOI:10.1007/BF02249379 |
| [8] | Hori T, Sakakibara J. High-speed scanning stereoscopic PIV for 3D vorticity measurement in liquids[J]. Measurement Science and Technology , 2004, 15 : 1067–1078. DOI:10.1088/0957-0233/15/6/005 |
| [9] | Scarano F. Tomographic PIV:principles and practice[J]. Measurement Science and Technology , 2013, 24 : 1–28. |
| [10] | Willert C, Gharib M. Three-dimensional particle imaging with a single camera[J]. Experiments in Fluids , 1992, 12 : 353–358. |
| [11] | Pereira F, Gharib M, Dabiri D, et al. Defocusing PIV:a three-component 3-D PIV measurement technique application to bubbly flows[J]. Experiments in Fluids , 2000, 29 : S78–S84. DOI:10.1007/s003480070010 |
| [12] | Hinsch K. Holographic particle image velocimetry[J]. Mea-surement Science and Technology , 2002, 13 : R61–R72. DOI:10.1088/0957-0233/13/7/201 |
| [13] | Arroyo M, Hinsch K. Recent developments of PIV towards 3D measurements[M]//Particle Image Velocimetry:New Developments and Recent Applications. New York:Springer, 2008. |
| [14] | Katz J, Sheng J. Applications of holography in fluid mechanics and particle dynamics[J]. Annual Review of Fluid Mechanics , 2010, 42 : 531–555. DOI:10.1146/annurev-fluid-121108-145508 |
| [15] | Elsinga G, Scarano F, Wieneke B, et al. Tomographic particle image velocimetry[J]. Experiments in Fluids , 2006, 41 : 933–947. DOI:10.1007/s00348-006-0212-z |
| [16] | Belden J, Truscott T, Axiak M, et al. Three-dimensional synthetic aperture particle image velocimetry[J]. Measurement Science and Technology , 2010, 21 : 1–21. |
| [17] | Gao Q, Wang H P, Wang J J. A single camera volumetric particle image velocimetry and its application[J]. Science China Technological Sciences , 2012, 55 : 2501–2510. DOI:10.1007/s11431-012-4921-7 |
| [18] | Ng R, Levoy M, Bredif M, et al. Light field photography with a hand-held plenoptic camera[R]. Tech report CTSR 2005-02, California:Stanford University, 2005. |
| [19] | Ng R. Digital light field photography[D]. Stanford University, CA, USA, 2006. |
| [20] | Lytro Inc. Lytro illum[EB/OL].[2016-09-10]. https://www.lytro.com/. |
| [21] | Cenedese A, Cenedese C, Furia F, et al. 3D particle reconstruction using light field imaging[C]//16th Int Symp on Applications of Laser Techniques to Fluid Mechanics. Lisbon, Portugal, 2012. |
| [22] | Foy R, Vlachos P. Multi-camera plenoptic particle image velocimetry[C]//10th International Symposium on Particle Image Velocimetry-PIV13. Delft, The Netherlands, 2013. |
| [23] | Raytrix GmbH Inc. 3D light field camera solutions[EB/OL].[2016-09-15]. https://www.raytrix.de/produkte/. |
| [24] | Chen H, Sick V. Plenoptic particle tracking velocimetry for internal combustion engine measurements[C]//11th International Symposium on Particle Image Velocimetry-PIV15, Santa Barbara, California, 2015. |
| [25] | 丁俊飞, 施圣贤.基于光场成像原理的单相机三维流动测试技术[C]//第十四届全国实验力学学术会议.重庆, 2015. |
| [26] | Ding J F, Wang J H, Liu Y Z, et al. Dense ray tracing based reconstruction algorithm for light field volumetric particle image velocimetry[C]//7th Australian Conference on Laser Diagnostics in Fluid Mechanics and Combustion. Melbourne, Australia, 2015. |
| [27] | Fahringer T W, Lynch K P, Thurow B S. Volumetric particle image velocimetry with a single plenoptic camera[J]. Measurement Science and Technology , 2015, 26 : 115201. DOI:10.1088/0957-0233/26/11/115201 |
| [28] | Shi S, Wang J, Ding J, et al. Parametric study on light field volumetric particle image velocimetry[J]. Flow Measurement and Instrumentation , 2016, 49 : 70–88. DOI:10.1016/j.flowmeasinst.2016.05.006 |
| [29] | Levoy M. Light fields and computational imaging[J]. Compu-ter , 2006, 8 : 46–55. |
| [30] | Adelson E H, Bergen J R. The plenoptic function and the elements of early vision[C]//Computational Models of Visual Processing. Cambridge, Mass:MIT Press, 1991. |
| [31] | Levoy M, Hanrahan P. Light field rendering[J]. ACM Trans Graph , 1996 : 31–42. |
| [32] | Georgiev T, Zheng K, Curless B, et al. Spatio-angular resolution tradeoff in integral photography[C]//17th Eurographics Symposium on Rendering, Cyprus, 2006. |
| [33] | Buchmann N, Willert C, Soria J. Pulsed, high-power LED illumination for tomographic particle image velocimetry[J]. Experiments in Fluids , 2012, 53 : 1545–1560. DOI:10.1007/s00348-012-1374-5 |
| [34] | Wieneke B. Volume self-calibration for 3D particle image velocimetry[J]. Experiments in Fluids , 2008, 45 : 549–556. DOI:10.1007/s00348-008-0521-5 |
| [35] | Atkinson C, Soria J. An efficient simultaneous reconstruction technique for tomographic particle image velocimetry[J]. Experiments in Fluids , 2009, 47 : 553–568. DOI:10.1007/s00348-009-0728-0 |