


2. 中国科学院大学, 北京 100049
2. University of Chinese Academy of Scinces, Beijing 100049, China
1 Introduction
Most of Earth’s major features can be understood from the interactions between tectonic plates,which move independently,separating from,colliding with,and sliding against one another. Until the middle 1960s an unifying theory was developed to explain Earth’s dynamics[1]. Several decades after the inception of the theory on plate tectonics,the plate dynamic models constructed using the geological and geophysical data have been dominant,until long time-span geodetic observations were gathered to estimate contemporary plate kinematic parameters[2, 3, 4, 5]. As one of the most representative geological plate motion models,NUVEL-1A is one of the mainstream models regarding the plate dynamics and kinematics. With the setting up of the enhanced amount and quality of the geologic or geodetic data during the last few years,the MORVEL refined the precision and accuracy of the geometric and kinematic parameters for 56 plates that are partly taken from an updated digital model of pate boundaries by Bird[6]. Relative to the NUVEL-1A,the MORVEL incorporates more than twice as many plates and covers more of Earth’s surface,and nearly all the NUVEL-1A angular velocities differ significantly from its MORVEL counterparts[7].
To derive an absolute motion model in a NNR reference frame,however,the inertia tensors are always considered as indispensable attribute of all these plates. Despite various established methods for calculating plate inertia tensors corresponding to the NUVEL-1A model presented in many papers[8, 9],however it is necessary to recalculate a new set for the NNR-MORVEL56 model[10],given the considerable discrepancy between the NUVEL-1A and the MORVEL.
When a polygon on the unit sphere is employed for the representation of a tectonic plate,a simplified analysis of the plate inertia tensor can be performed through a numerical method,which is carried out over all 56 plates. The method for calculating all 9 components of the inertia tensor is illustrated in this paper and this method requires the precise knowledge of the plate boundaries. The boundary file contains a 2-column sequence of the latitude-longitude plate boundary coordinates that fully enclose the plate in the counterclockwise direction.
In the first section,we introduce some concepts regarding the no-net-rotation conditions and indicate the calculation of the Euler vector in an absolute motion model. The following section describes the detailed mathematical models to estimate the area and the inertia tensor of the spherical polygons. The last section of this paper is dedicated to manifest the results for 56 modern plates and the appendix gives the original FORTRAN90 program for obtaining the aforementioned results.
2 Net Lithosphere RotationA no-net-rotation model for the lithosphere assumes that the integral of v×r over the Earth’s surface equals zero[11],i.e.





The spherical polygons are defined by great circle arcs connecting points on the sphere,the positions of which are given by latitudes and longitudes. In fact,an algorithm for determining the area of a spherical polygon of arbitrary shape has been presented by Bevis and Cambareri[15],where the kernel idea is to compute the interior angle at each vertex of the spherical polygon. In this paper,however,we employ a somewhat similar method to that of Miller[16],trying to determine the area of spherical polygon by summing the signed areas of component triangles.
For a spherical polygon of n sides,the spherical excess E is generalized as



To find the area of a spherical polygon,first,one may use the successive vertices in pair to form a spherical triangle. Each spherical triangle employs the north pole as a common vertex to make the calculations convenient. When calculating the areas of the individual triangles,we adopt a convention that the sign of the triangle area(which has a same value as the spherical excess for a polygon on a unit sphere) is identical to the sign of the difference between the longitudes of a pair of adjacent vertices. If the longitude of the first vertex is less than the second one,then the sign of this triangle area is defined as a positive value for a set of points arranged in the anticlockwise way and vice versa. Therefore the area of the spherical polygon isregarded as the absolute value of the sum of the signed spherical excesses for each of the spherical triangles. Taking the facility of the calculation for the upcoming inertia tensor,a provision is crucial that the vertex point traversing the polygon prefersto be enumerated in the counterclockwise direction.

|
|
Fig. 1 Spherical polygon and triangles illustrating calculation method for area and inertia tensor discussed in text.
(a) N triangles constructed from counterclockwise spherical polygon of n sides; (b) Spherical triangle encompassing Sorth Pole and the sides of polygon traversing the 180th meridian |
One should note the following two special cases when estimating the geometric parameters of the spherical polygons. The first case is as follows: if the sides of the polygon cross over the International Date Line from point E1 to W1,as illustrated in the Fig. 1(b),a 2π has to be added to the longitude of W1. The same applies to a similar situation when a vertex leave W2 for E2,a 2π has to be subtracted from E2 in order to promise the continuity of the calculation. The second case occurs when a spherical polygon has an area larger than that of the hemisphere. According to a implicit assumption that the area of any polygon is less than 2π,for those extensive polygons,such as the triangle ABC surrounding the north pole N,the exact area of ABC is the complement of ABC including the north pole,i.e. Exactarea=AreaABCS=4π-AreaABCN. The original FORTRAN90 program in the appendix has taken into account these two singular cases.
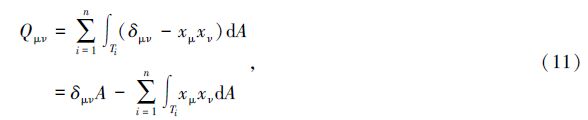
3.2 Estimation of plate inertia tensorThe components of the symmetric inertia tensor Q can be calculated for a region P using the following formula:


In this paper we propose a somewhat different method from Schettino[17] for constructing the spherical triangle. In fact,we will see that the integral at the right-hand side of (Eq.(9)) is easily calculated for spherical triangles. The components of the total tensor are therefore given by:







Unlike the process of the area estimation,the evaluation of the inertia tensor is associated with the integral order. Hence,a counterclockwise direction must be adopted in the procedure. All of the special situations have been considered in the Fortran program,including the 180th meridian case and the encompassing the South Pole case. In addition to the aforementioned two special cases in the area estimation,the principal moments in the tensor calculation need to be deducted from the whole inertia tensor of the spherical surface in order to acquire the exact moments,i.e. MomentExactS=8π/3-MomentPrincipalN,when involving the polygon containing the south pole.
4 Results and analysisThe NNR-NUVEL56 model contains 56 tectonic plates around the earth,and the software OSXStereonet developed by Cardozo and Allmendinger[18] was applied to plot the global plate distribution map,as illustrated in Fig. 2. Utilizing the Fortran program,we estimated geometry parameters of all 56 modern plates with the accuracy the inertia tensor better than 10-6. Table 1 lists the area and the inertia tensor of all MORVEL plates,which provide essential material for calculating plate kinematic parameters in the NNR reference frame. The sum of the area of all plates equals 12.566340 steradian,which is slightly less than the surface area of the whole unit sphere,namely 4π(12.566371) with the relative error η=0.00023%. Our results indicate that the relative errors for the six components of the total tensor are 0.00017%,0.00029%,0.00026%,0.0010%,0.00016%,and 0.00010% respectively,It is shown that the inertia tensor of the entire spherical surface is 8π/3E,where E takes the identity matrix. The discrepancy probably arises from either the imperfection of plates over the entire sphere or the unavoidable rounding errors in floating point arithmetic.
5 ConclusionThe method for computing the areas and inertial tensors of tectonic plates has been presented. This method is based upon the triangulation algorithm and the adaptive Simpson’s double integral procedure,which can be applied to the spherical polygons representing such tectonic plates. Results for the NNR-MORVEL56 tectonic plates show that highly reliable data can be produced,as long as starting from the precise definition of the plate boundaries. In addition,a FORTRAN90 program has been attached to the end of thispaper,which is expected to be valuable to the future studies of the kinematics and dynamics associated to the motions of tectonic plates.

|
|
Fig. 2 Plate boundaries and geometries employed for MORVEL
(a) View direction at 35°sorth,0°east; (b) View direction at 20°north,180°east |
| Platea | Areab | Q11 | Q22 | Q33 | Q12 | Q13 | Q23 |
| ram | 0.130659 | 0.108248 | 0.089481 | 0.063589 | 0.028732 | 0.036320 | -0.051295 |
| an | 1.432624 | 1.326692 | 1.174711 | 0.363845 | -0.050954 | 0.052461 | 0.081269 |
| AP | 0.020501 | 0.018168 | 0.004178 | 0.018656 | 0.006097 | 0.002056 | -0.005420 |
| ar | 0.120824 | 0.074249 | 0.066810 | 0.100589 | -0.048782 | -0.029553 | -0.031041 |
| AS | 0.007930 | 0.003780 | 0.007017 | 0.005063 | -0.001938 | -0.003445 | -0.001610 |
| AT | 0.014182 | 0.008022 | 0.011586 | 0.008756 | -0.003970 | -0.005767 | -0.003733 |
| au | 0.921383 | 0.597620 | 0.558686 | 0.686460 | 0.223995 | -0.217199 | 0.241071 |
| BH | 0.012950 | 0.007157 | 0.005807 | 0.012936 | 0.006391 | -0.000194 | 0.000201 |
| BR | 0.004814 | 0.000353 | 0.004786 | 0.004488 | 0.000322 | -0.001203 | 0.000086 |
| BS | 0.017146 | 0.011322 | 0.005961 | 0.017009 | 0.007977 | -0.000850 | 0.001173 |
| BU | 0.012697 | 0.012632 | 0.000436 | 0.012327 | 0.000852 | 0.000130 | -0.001936 |
| ca | 0.073043 | 0.066003 | 0.011971 | 0.068111 | 0.018006 | -0.005213 | 0.017059 |
| CL | 0.037650 | 0.015349 | 0.022487 | 0.037464 | 0.018192 | 0.001581 | -0.001323 |
| co | 0.072230 | 0.071072 | 0.003017 | 0.070372 | -0.005543 | 0.001064 | 0.010142 |
| cp | 0.203647 | 0.196537 | 0.022175 | 0.188580 | -0.021636 | 0.007182 | 0.045603 |
| CR | 0.003559 | 0.000414 | 0.003532 | 0.003172 | 0.000289 | -0.001100 | 0.000101 |
| EA | 0.004114 | 0.003554 | 0.001272 | 0.003402 | -0.001260 | -0.000631 | -0.001420 |
| eu | 1.196311 | 1.005910 | 0.894791 | 0.491921 | -0.035559 | -0.213221 | -0.310262 |
| FT | 0.000789 | 0.000054 | 0.000787 | 0.000736 | -0.000027 | -0.000197 | -0.201601077 |
| GP | 0.000360 | 0.000346 | 0.000015 | 0.000360 | -0.000071 | 0.201601072 | 0.000012 |
| in | 0.306360 | 0.286350 | 0.042318 | 0.284052 | -0.057049 | -0.013096 | -0.060490 |
| jf | 0.006315 | 0.005162 | 0.004356 | 0.003111 | -0.001501 | 0.001916 | 0.002491 |
| JZ | 0.002406 | 0.002192 | 0.000941 | 0.001679 | -0.000560 | -0.000394 | -0.001032 |
| KE | 0.012450 | 0.003751 | 0.012432 | 0.008717 | -0.000123 | -0.005589 | -0.000034 |
| lw | 0.117084 | 0.063137 | 0.081094 | 0.089937 | -0.043330 | 0.036053 | 0.029664 |
| MA | 0.010367 | 0.004018 | 0.007354 | 0.009362 | 0.004369 | 0.002475 | -0.001708 |
| MN | 0.000203 | 0.000050 | 0.000154 | 0.000202 | 0.000086 | -0.000011 | 0.201601076 |
| MO | 0.002841 | 0.001271 | 0.001581 | 0.002830 | 0.001405 | -0.000126 | 0.000113 |
| mq | 0.007890 | 0.006131 | 0.007510 | 0.002139 | 0.000812 | -0.003172 | 0.001465 |
| MS | 0.010301 | 0.007165 | 0.003150 | 0.010287 | 0.004720 | -0.000118 | 0.000164 |
| na | 1.365654 | 1.228582 | 0.941574 | 0.561152 | 0.066184 | -0.003632 | 0.396247 |
| NB | 0.009563 | 0.002624 | 0.006962 | 0.009540 | 0.004209 | -0.000360 | 0.000211 |
| ND | 0.023942 | 0.022362 | 0.002000 | 0.023523 | 0.005755 | -0.000735 | 0.002485 |
| NH | 0.015853 | 0.001931 | 0.015441 | 0.014334 | 0.002345 | -0.004547 | 0.000758 |
| NI | 0.003062 | 0.000271 | 0.003046 | 0.002808 | -0.000212 | -0.000839 | -0.000063 |
| nb | 1.440653 | 0.372572 | 1.301219 | 1.207515 | -0.051346 | -0.005428 | 0.044223 |
| nz | 0.396683 | 0.385354 | 0.068410 | 0.339603 | -0.012644 | -0.002969 | -0.113428 |
| OK | 0.074825 | 0.053441 | 0.066413 | 0.029796 | 0.012953 | 0.030320 | -0.017870 |
| ON | 0.008000 | 0.005617 | 0.004075 | 0.006307 | 0.003044 | 0.002004 | -0.002552 |
| pa | 2.576858 | 1.175689 | 1.961254 | 2.016772 | -0.429469 | 0.077428 | -0.057431 |
| PM | 0.006744 | 0.006575 | 0.000333 | 0.006580 | 0.001000 | -0.000159 | 0.001021 |
| ps | 0.134118 | 0.077744 | 0.071266 | 0.119226 | 0.058301 | 0.026648 | -0.027639 |
| ri | 0.002486 | 0.002289 | 0.000489 | 0.002193 | -0.000625 | 0.000239 | 0.000763 |
| sa | 1.003382 | 0.606780 | 0.582701 | 0.817282 | 0.338318 | 0.179187 | -0.168608 |
| SB | 0.007615 | 0.002101 | 0.005575 | 0.007554 | 0.003341 | -0.000571 | 0.000346 |
| sc | 0.041900 | 0.036723 | 0.034464 | 0.012613 | 0.005695 | 0.011988 | -0.014451 |
| SL | 0.001780 | 0.001675 | 0.001490 | 0.000396 | 0.000174 | 0.000381 | -0.000634 |
| sm | 0.354795 | 0.221034 | 0.153743 | 0.334814 | -0.154899 | 0.024755 | 0.035861 |
| sr | 0.027055 | 0.018681 | 0.026496 | 0.008933 | 0.001954 | 0.012245 | -0.002957 |
| SS | 0.003170 | 0.000715 | 0.002505 | 0.003119 | 0.001275 | -0.000352 | 0.000183 |
| su | 0.219667 | 0.188850 | 0.036326 | 0.214159 | 0.069104 | 0.006544 | -0.016832 |
| sw | 0.004543 | 0.003525 | 0.004269 | 0.001292 | 0.000527 | 0.001817 | -0.000940 |
| TI | 0.008704 | 0.005784 | 0.003120 | 0.008503 | 0.004009 | -0.000751 | 0.001052 |
| TO | 0.006248 | 0.000759 | 0.006194 | 0.005544 | -0.000536 | -0.001947 | -0.000186 |
| WL | 0.011163 | 0.003492 | 0.007835 | 0.010998 | 0.004966 | -0.001074 | 0.000660 |
| yz | 0.054249 | 0.045687 | 0.019960 | 0.042851 | 0.016644 | 0.009648 | -0.019528 |
| a Plate name abbreviations are as follows: am,Amur; an,Antarctic; AP,Altiplano; ar,Arabia; AS,Aegean Sea; au,Australia; BH,Birds Head; BR,Balmoral Reef; BS,Banda Sea; BU,Burma; ca,Caribbean; CL,Caroline; cp,Cocos; cp,Capricorn; CR,Caroline; EA,Easter; eu,Eurasia; FT,Futuna; GP,Galapagos; in,India; jf,Juan de Fuca; JZ,Juan Fernandez; KE,Kermadec; lw,Lwandle; MA,Mariana; MN,Manus; MO,Maoke; mq,Macquarie; MS,Molucca Sea; na,North America; NB,North Bismarck; ND,North Andes; NH,New Hebrides; NI,Niuafoou; nb,Nubia; nz,Nazca; OK,Okhotsk; ON,Okinawa; pa,Pacific; PM,Panama; ps,Philippine Sea; ri,Rivera; sa,South America; SB,South Bismarck; sc,Scotia; SL,Shetland; sm,Somalia; sr,Sur; SS,Solomon Sea; su,Sundaland; sw,Sandwich; TI,Timor; TO,Tonga; WL,Woodlark; yz,Yangtze. Plate abbreviations given in lower case are for plates included in the MORVEL. Plate abbreviations given in the upper case are for plates from Bird (2003); b. Plate areas are in steradians for a unit sphere,and the sum of which totals 4π. | |||||||
| [1] | Hamblin W K,Christiansen E H.Earth's dynamic systems[M].10th ed.State of New Jersey:Prentice Hall,2003. |
| [2] | Larson K M,Freymueller J T,Philipsen S.Global plate velocities from the global positioning system[J].Journal of Geophysical Research Solid Earth,1997,102(B5):9961-9981. |
| [3] | Sella G F,Dixon T H,Mao A.Revel:a model for recent plate velocities from space geodesy[J].Journal of Geophysical Research Solid Earth,2002,107(B4):ETG 11-1-ETG 11-30. |
| [4] | Corné K,Holt W E,John H A.An integrated global model of present-day plate motions and plate boundary deformation[J].Geophysical Journal International,2003,154(1):8-34. |
| [5] | Altamimi Z,Métivier L,Collilieux X.ITRF 2008 plate motion model[J].Journal of Geophysical Research Solid Earth,2012,117(B7):47-56. |
| [6] | Peter B.An updated digital model of plate boundaries[J].Geochemistry Geophysics Geosystems,2003,4(3):101-112. |
| [7] | Demets C,Gordon R G,Argus D F.Geologically current plate motions[J].Geophysical Journal International,2010,181(1):1-80. |
| [8] | Argus D F,Gordon R G.No-net-rotation model of current plate velocities incorporating plate motion model nuvel-1[J].Geophysical Research Letters,1991,18(11):2039-2042. |
| [9] | Corné K,Holt W E.A no-net-rotation model of present-day surface motions[J].Geophysical Research Letters,2001,28(23):4407-4410. |
| [10] | Argus D F,Gordon R G,Demets C.Geologically current motion of 56 plates relative to the no-net-rotation reference frame[J].Geochemistry Geophysics Geosystems,2011,12(11):75-87. |
| [11] | Klemann V,Martinec Z,Ivins E R.Glacial isostasy and plate motion[J].Journal of Geodynamics,2008,46(3-5):95-103. |
| [12] | Solomon S C,Sleep N H.Some simple physical models for absolute plate motions[J].Journal of Geophysical Research,1974,79(17):2557-2567. |
| [13] | Torsvik T H,Steinbergerd B,Gurnise M,et al.Plate tectonics and net lithosphere rotation over the past 150 my[J].Earth & Planetary Science Letters,2010,291(1):106-112. |
| [14] | Zuheir A,Patrick S,Claude B.The impact of a no-net-rotation condition on ITRF2000[J].Geophysical Research Letters,2003,30(2):36-1-36-4. |
| [15] | Bevis M,Cambareri G.Computing the area of a spherical polygon of arbitrary shape[J].Mathematical Geology,1987,19(4):335-346. |
| [16] | Heckbert P S.Graphics Gems IV[M].Boston:Academic Press Professional,1994:132-137. |
| [17] | Schettino A.Computational methods for calculating geometric parameters of tectonic plates[J].Computers & Geosciences,1999,25(8):897-907. |
| [18] | Cardozo N,Allmendinger R W.Spherical projections with OSXStereonet[J].Computers & Geosciences,2013,51:193-205. |