
Multiobjective optimization and dynamic response of an offshore wind turbine with an articulated foundation
-
摘要: 针对一种新型铰接式基础风力机的基础结构设计与优化问题,综合考虑风力机运行安全稳性、经济成本及运动性能等多方面因素,本文建立了高维三目标优化数学模型,采用一种基于参考点的非支配排序多目标遗传算法(NSGA-Ⅲ)对风力机基础结构尺寸进行优化设计研究,利用模糊优选方法,对所得到的帕累托解进行模糊评价,得到满足不同评价指标下的最优方案;并在此基础上,采用空气动力-水动力-结构耦合分析方法,利用Matlab在时域内编写运动控制方程进行动力响应分析。计算结果表明: 额定风速海况下,所设计的铰接式基础风力机满足安全发电作业要求,同时相比于初始设计方案,基于多目标优化算法及模糊评价所设计的基础结构无论是运动及载荷性能都更加优越,经济成本更低;相关算法及优化流程也为后续不同基础形式的优化设计工作提供了新思路和参考。Abstract: Aiming at the foundation design and optimization of a new type of wind turbine with an articulated foundation, a high-dimension mathematical model with three-objective optimization is established by comprehensively considering the operational safety and stability, economic cost, and motion performance of an articulated offshore wind turbine. The model adopts a type of nondominated sorting multiobjective genetic algorithm (NSGA-Ⅲ) based on the reference points to optimize the foundation dimension of the wind turbine and uses the fuzzy optimization method to perform fuzzy evaluation on the obtained Pareto solution, thereby obtaining the optimal scheme satisfying different evaluation indices. Based on this, the aerodynamic, hydrodynamic, and structural coupling analysis method was adopted to construct the motion control equation in the time domain for the analysis of the dynamic response. The calculation results showed that under the rated wind speed and oceanic conditions, the designed wind turbine with an articulated foundation meets the requirement of safe power generation. Meanwhile, compared with the initial design scheme, the articulated foundation structure based on the multiobjective optimization algorithm and fuzzy evaluation displays superior motion and load performance and is more economical. The related algorithm and optimization process also provide a new idea and reference for subsequent optimization design work with different foundational forms.
-
当前,海上风力机的研究蓬勃发展,对于海上风力机这样的新型海工结构物,其结构设计和优化问题通常涉及多个部件和系统,存在众多设计变量、约束条件和优化目标,可以视为复杂多目标优化问题。SHUKLA[1]根据计算准则的不同将多目标优化算法大致可以分为经典算法和多目标进化算法。
经典算法基于严格的数学计算准则,大多通过将多目标优化问题转化为单目标优化问题,再借助单目标优化算法求解pareto最优解。COLLETTE[2]通过对目标函数进行无偏好的目标指数求和,将多目标优化设计函数转化为单目标的新评价函数进行求解。MATTSON等[3]从设计偏好的角度,将设计目标函数映射为新的优化目标,并基于约束准则[4],将目标函数依据偏好度排序选择一个设计目标进行优化计算,而将其他目标转化为约束条件,也称为ε约束法。
上述经典算法大多是将多目标优化问题降维成单目标优化问题来求解,但对于越来越复杂的多目标优化问题,所求得的解常常会出现局部最优、不连续、Pareto前沿不收敛等问题。而多目标进化算法[5]基于进化理论中的种群概念,依据适者生存和优胜劣汰的自然规律,对种群中个体进行繁殖、变异、重组和选择等一系列操作,通过一次次迭代获得最终的Pareto最优解集。经过30多年的发展,多目标优化算法逐渐涌现出了一系列典型算法,如PESA-Ⅱ,NGSA-Ⅱ及SPEA等。多目标进化算法的一大重要特征在于采用了Pareto支配关系来判断解在目标空间中的优劣。因此,这些典型算法大多采用Pareto支配准则来对种群中个体进行非支配排序,这样的方式在处理低维目标空间时会比较有效,但对于三维及以上高维目标[6]的优化问题时,就会显得乏力。
实际应用中,优化问题的设计目标及决策变量常常不止一两个。对于海上风力机这样涉及多个部件和系统的复杂结构,在进行其结构参数优化设计时,往往需要考虑为高维多目标优化问题。本文在对风力机的铰接基础结构进行参数优化设计时,考虑采用一种基于快速非支配排序的第3代多目标遗传算法[7](non-dominated sorting genetic algorithm,NSGA-Ⅲ)来进行求解。该算法最初是由SRINIVAS等[8]基于遗传算法所提出,并引入支配与非支配关系的概念,对任意多个目标进行排序;DEB等[9]又在NSGA算法基础上进行改进提出(NSGA-Ⅱ)算法,使用快速非支配排序来保证收敛性,同时为了使得解在目标空间中更加均匀,引入拥挤度概念来保持种群多样性。DEB等[10]通过在2代算法基础上提出了第3代非支配排序遗传算法(NSGA-Ⅲ),通过引入广泛参考点机制,使用预定义的目标搜索方法,对那些非支配并且接近参考点的种群个体进行保留来维持种群多样性。相较于传统的遗传算法及带有精英保留策略的快速非支配排序多目标优化算法,整体算法框架大致相同,但选择机制有所不同,NSGA-Ⅲ算法通过引入广泛分布的空间参考点[11],可根据目标空间维度及划分数,自适应产生参考点分布,得到种群个体与响应参考点之间的映射关系,有效解决了二代算法无法实现超维前沿可视化以及计算收敛过快、多样性不足等缺陷,精确捕捉变量域内所有有效解,大大减小算法搜索时间。
经过多目标优化计算,得到一组符合设计目标及约束条件的Pareto解。而对于多目标优化算法解集性能的评价大多基于参考集展开的,通常取期望Pareto前沿中的参考点作为参考集。但对于风力机结构参数优化这样的实际工程问题来说,并不存在或很难确定参考集,多目标优化算法的相关评价指标并不适用。同时,由于不同设计目标及约束条件对于最终优选方案的影响程度不同,很难直接从Pareto前沿或解集中得到一组最优的设计方案。因此,本文基于模糊优选理论[12],考虑采用模糊综合评价方法[13],对满足多目标优化模型的Pareto解集进行评价分析。模糊综合评价方法是一种基于模糊数学理论的综合评价方法,参考模糊数学中的隶属度理论,将对目标样本的定性评价分析转化为定量评价分析。
针对铰接式基础风力机的结构设计,目前还没有直接的规范和指导,本文以铰接塔平台[14]及浮式风力机为参考,通过分析风力机在海洋环境下的力学特征及结构间耦合作用关系,同时考虑风力机运动的安全稳性、建造成本等因素,建立铰接式基础结构的三目标优化数学模型。创新性采用一种基于参考点的非支配排序多目标遗传算法(NSGA-Ⅲ)和模糊综合评价方法相结合的方式对风力机基础结构尺寸进行优化设计研究。同时基于气动力、水动力学理论,建立铰接式风力机单自由度刚体动力学模型[15],验证其在额定作业海况下受风、浪、流等环境载荷作用时的动力响应特性。
1. 计算模型
铰接式基础主体为一定壁厚的立柱体结构,自海底贯穿至水线面以上,底部通过铰接轴承与海底桩基连接,顶部固定连接风力机塔柱;同时为提高结构整体稳性,分别在基础底部设置有压载舱,内部压载混凝土降低结构重心,接近水线面处设浮力舱,为整体结构提供回复力矩,其三维实体模型如图 1所示。
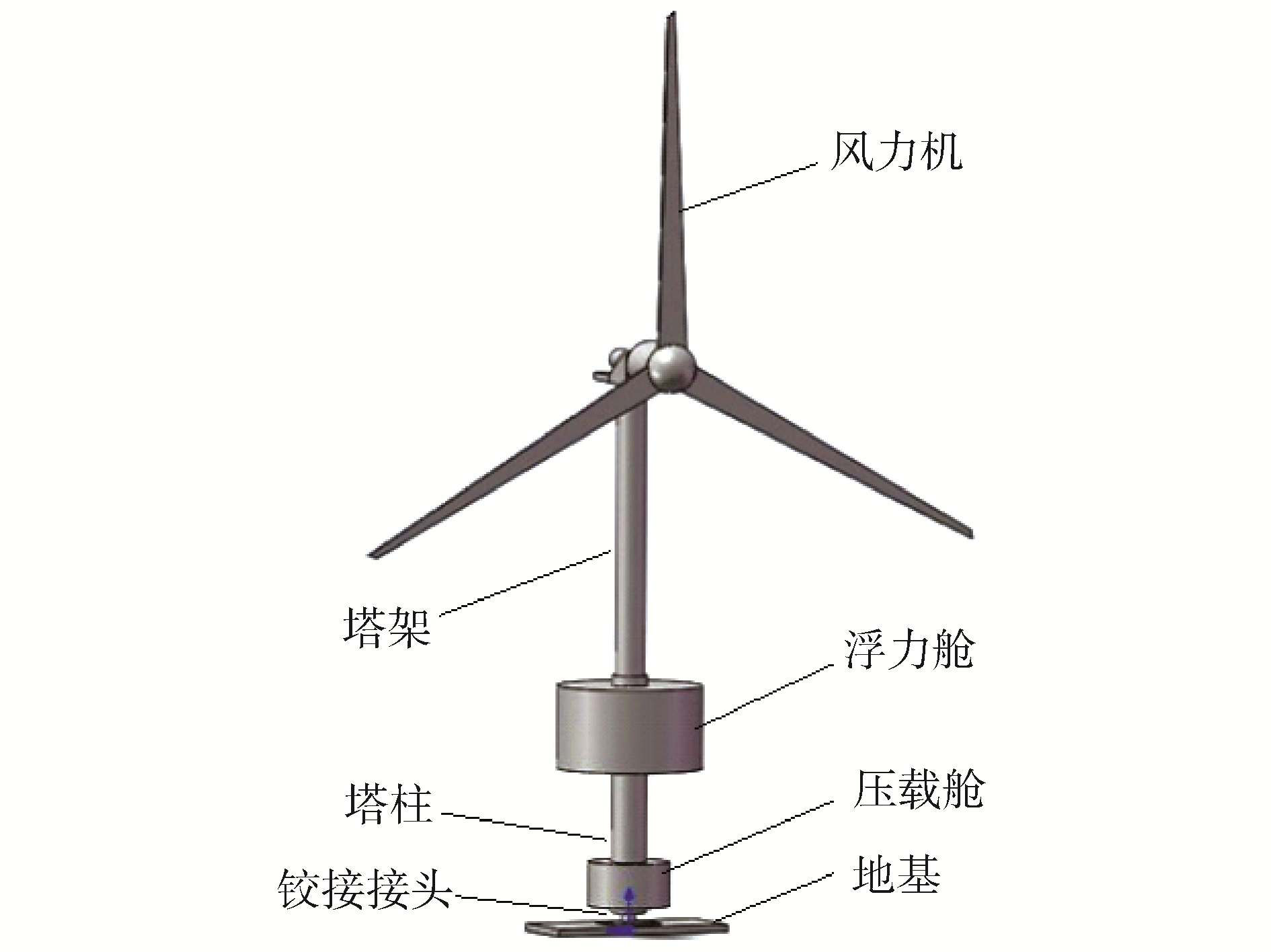 图 1 铰接式基础风力机实体模型Fig. 1 Model of articulated foundation offshore wind turbine
图 1 铰接式基础风力机实体模型Fig. 1 Model of articulated foundation offshore wind turbine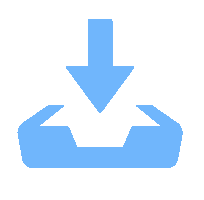 下载:
全尺寸图片
下载:
全尺寸图片
同时压载舱底部及浮力舱顶部分别留余H1down=2 m及H1up=5 m高度的立柱,保证大角度倾斜条件下,底部压载舱不至于触底撞击,浮力舱不至于浸出水面损失浮力,参考铰接塔平台结构尺度及轴承承载力等级要求[16],铰接轴承选用半径R=1.5 m铰接球轴承,基础结构模型如图 2所示。
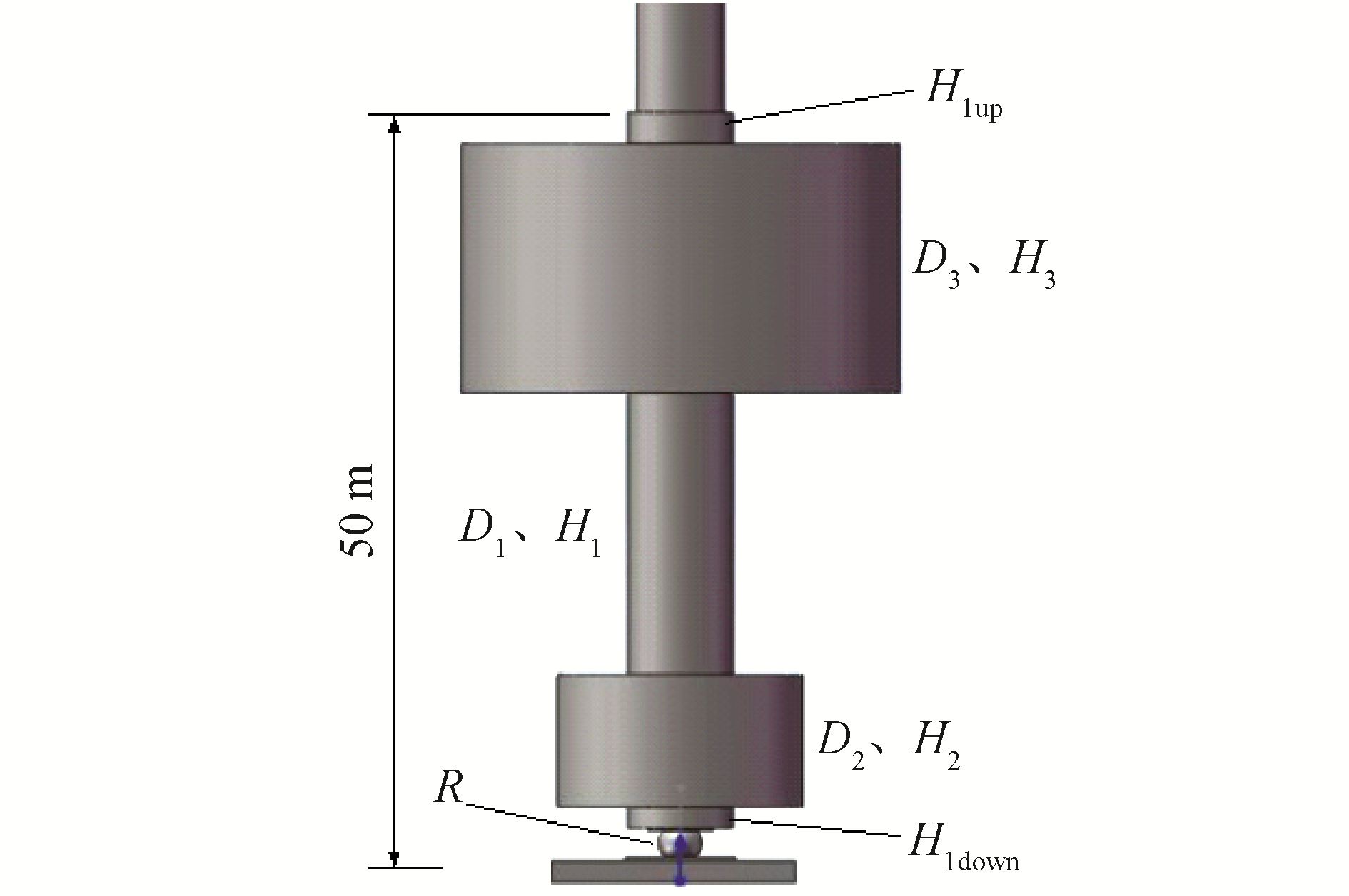 图 2 铰接式基础结构模型Fig. 2 Structural model of articulated foundation下载:
全尺寸图片
图 2 铰接式基础结构模型Fig. 2 Structural model of articulated foundation下载:
全尺寸图片
其中压载舱、主体立柱及浮力舱为基础主要结构,其半径、高度及壁厚参数直接决定了基础整体重量及稳性状态,故以中间立柱、压载舱和浮力舱的直径(D1、D2和D3)、中间立柱、压载舱和浮力舱的高度(H1、H2和H3)以及壁厚t为设计变量;由于铰接式基础风力机没有系泊系统,结构回复力完全由剩余浮力提供,底部铰接轴承承受较大上浮力作用,而基础重量直接决定建造成本,因此在结构设计时考虑结构能够提供足够回复力矩的同时还需尽量减小铰接轴承所受上浮力,同时控制结构重量不宜过大,故以最小化基础结构重量M、最小化铰接轴承上浮力Fjoint和最大化回复力矩Mgb为目标函数;由于风力机运动平衡位置主要受风载荷影响,为满足结构稳性要求,以额定风速下风力机所受最大风倾力矩小于回复力矩为不等式约束;而压载舱和浮力舱直径不小于中间立柱直径大小,设计变量D1、D2和D3之间存在不等式约束;同时考虑到50 m作业水深,铰接轴承及立柱上下两端确定性尺寸,中间立柱、压载舱和浮力舱的高度间存在等式约束;铰接式基础风力机多目标优化数学模型为:
$$\begin{array}{l} \min \left\{M, F_{\text {joint }}, -M_{g b}\right\}=f\left(D_{1}, D_{2}, D_{3}, H_{1}, H_{2}, H_{3}, t\right)\\ \ \ \ \text { s. t. }\left\{\begin{array}{l} F_{\text {wind }}-M_{g b} \leqslant 0 \\ D_{1}-D_{2} \leqslant 0 \\ D_{1}-D_{3} \leqslant 0 \\ H_{1}+H_{2}+H_{3}-40=0 \end{array}\right. \end{array}$$ (1) 式中:D1、D2、D3为中间立柱、压载舱和浮力舱的直径,m;H1、H2、H3为中间立柱、压载舱和浮力舱的高度,m;t为壁厚,mm;M为基础质量,kg;Fjoint为铰接轴承上浮力,N;Mgb为系统回复力矩,N·m;Fwind为额定风速下风力机所受风倾力矩,N·m。
2. 计算理论与方法
2.1 铰接式风力机力学分析
2.1.1 风载荷
对铰接式基础风力机进行结构设计时,采用准静态方法分析其力学特征,其中风力机所受风载荷主要考虑风轮旋转所受到的气动推力及塔柱所受风压载荷2部分,气动载荷基于叶素动量理论进行求解,并考虑对叶片无穷假设、叶尖及轮毂旋涡脱落等所带来的气动误差进行修正,风轮推力计算公式为:
$$ T=\int_{0}^{R} \mathrm{~d} T(r)=4 {\rm{ \mathsf{ π} }} r \rho v_{0}^{2} \int_{0}^{R} a(1-a) \mathrm{d} r$$ (2) 式中:r为叶素局部半径;v0为来流速度;a为轴向诱导因子。
计算塔柱所受风压载荷时将塔柱均分为10段,分段计算风压载荷并转化为对铰接点的转矩,再沿轴向积分得到塔架整体风压力距,计算公式为:
$$ F_{\text {tower }}=0.613 \sum\limits_{j=1}^{n}\left(C_{h} C_{s} A_{i}(\alpha) V_{r}^{2}\right)$$ (3) 式中:j为受风构件编号;Ch为受风构件高度系数;Cs为受风构件形状系数;Ai(α)为风向角为α时的第个i构件在风向上的正投影面积;Vr为受风构件与风的相对速度。最终铰接式风力机所受风载荷为风轮推力对铰接轴承的转矩及塔柱所受风压载荷对铰接轴承转矩的合力距。
2.1.2 静水回复力
铰接式基础底部通过球型铰接轴承与海底桩基连接,假定风力机整体随风浪绕铰接轴承做单自由度摇摆运动,考虑基础摇摆及波高引起的瞬时湿表面变化,浮力距与重力矩的差值即系统回复力矩,铰接式风力机受力分析如图 3所示。
 图 3 铰接式风力机结构受力Fig. 3 Force analysis of articulated offshore wind turbine下载:
全尺寸图片
图 3 铰接式风力机结构受力Fig. 3 Force analysis of articulated offshore wind turbine下载:
全尺寸图片
图 3中,坐标原点位于铰接轴承中心处,Mg为风力机整体重力,包括基础质量M和上部风力机质量Mtur、Fbuoy为浮力,Fwind、Fwave、Fcur分别为风力、波浪力及海流力,则铰接轴承承受初始上浮力为:
$$ F_{\text {joint }}=F_{\text {buoy }}-M g$$ (4) 由于基础水下结构为不规则体,在计算排水体积时,将其分为m1和m2两部分。首先在随体坐标x′oy′系中计算m1部分排水体积和浮心位置,m1可看作为分段式规则立柱结构,同时也是对称结构,则浮心横向坐标x′1=0,浮心垂向坐标则根据立柱、压载舱和浮力舱不同直径部分相对x轴的浮心静矩计算垂向积分和,并与m1部分总排水体积比值得到:
$$ y_{2}^{\prime}=\frac{\sum \int y_{i}^{\prime} \mathrm{d} V}{\sum \int \mathrm{d} V}$$ (5) 锲形体m2如图 4所示,建立局部坐标系x″oy″,由于为对称结构,则z″=0,根据空间数学几何关系可以计算得到锲形体质心坐标为:
$$ \begin{aligned} & x^{\prime \prime}=\frac{\int x \mathrm{~d} V}{\int \mathrm{d} V}=\frac{\int_{0}^{2 {\rm{ \mathsf{ π} }}} \mathrm{d} \beta \int_{0}^{\frac{D}{2}} \mathrm{~d} \rho \int_{-\frac{D}{2}}^{\frac{D}{2}} \tan \theta\left(\frac{D}{2}+\rho \cos \beta\right) x \mathrm{~d} x}{\frac{1}{8} {\rm{ \mathsf{ π} }} D^{3} \tan \theta}=\frac{D}{8} \\ & y^{\prime \prime}=\frac{\int y \mathrm{~d} V}{\int \mathrm{d} V}=\frac{\int_{0}^{2 {\rm{ \mathsf{ π} }}} \mathrm{d} \beta \int_{0}^{\frac{D}{2}} \mathrm{~d} \rho \int_{0}^{\tan \theta\left(\frac{D}{2}+\rho \cos \beta\right)} y \mathrm{~d} y}{\frac{1}{8} {\rm{ \mathsf{ π} }} D^{3} \tan \theta}=\frac{5}{16} D \tan \theta \end{aligned}$$ (6) 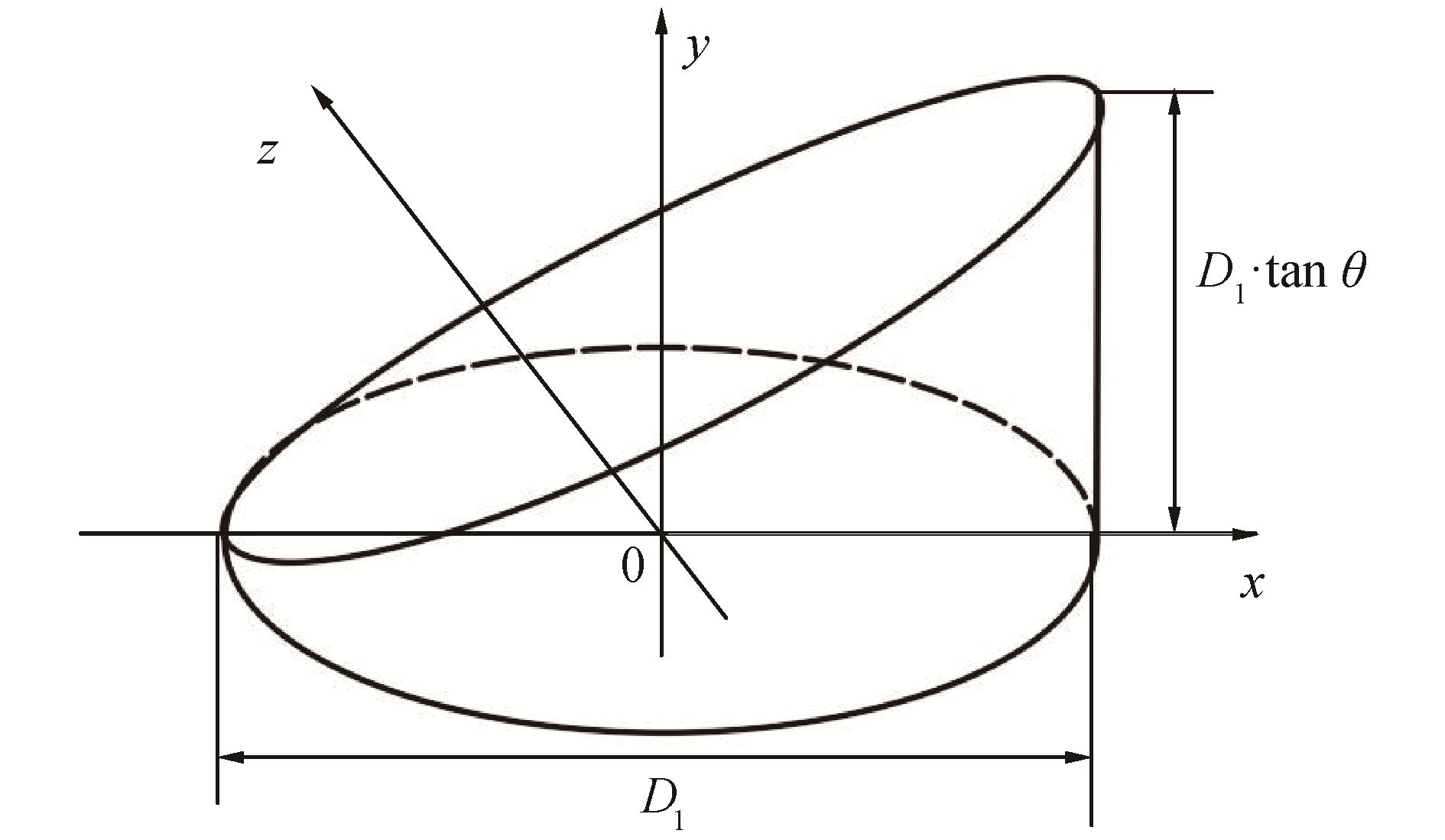 图 4 锲形体示意Fig. 4 Force analysis of articulated offshore wind turbine下载:
全尺寸图片
图 4 锲形体示意Fig. 4 Force analysis of articulated offshore wind turbine下载:
全尺寸图片
则锲形体m2在随体坐标系x′oy′中的坐标$ \left(x_{2}^{\prime}\right.$, $\left.y_{2}^{\prime}\right)$为$ \left(\frac{D}{8}, \frac{5}{16} D \tan \theta+l\right)$,从而得到随体坐标系中浮心坐标位置为:
$$ \begin{aligned} x^{\prime} & =\frac{m_{1} x_{1}^{\prime}+m_{2} x_{2}^{\prime}}{m_{1}+m_{2}} \\ y^{\prime} & =\frac{m_{1} y_{1}^{\prime}+m_{2} y_{2}^{\prime}}{m_{1}+m_{2}} \end{aligned}$$ (7) 转化到大地坐标系xoy中,浮心坐标(xb, yb)为:
$$ \begin{aligned} & x_{b}=x^{\prime} \cos \theta+y^{\prime} \sin \theta \\ & y_{b}=y^{\prime} \cos \theta-x^{\prime} \sin \theta \end{aligned}$$ (8) 则系统纵摇回复力矩为:
$$ M_{g b}=M_{b}-M_{g}=\left(m_{1}+m_{2}\right) g x_{b}-M g y_{G} \sin \theta$$ (9) 2.1.3 波浪载荷
采用三维绕射/辐射水动力软件Wadam计算浮体水动力系数,考虑风力机基础在随机波作用下,受到一阶及二阶和、差频波浪载荷作用,其计算公式为:
$$ \left\{\begin{array}{l} F_{\text {wave_1 }}(t)=\operatorname{Re}\left[\sum\limits_{i=1}^{M} \eta_{i} F_{1}\left(\omega_{i}\right)\right] \\ F_{\text {wave}\_{2s} }(t)=\operatorname{Re}\left[\sum\limits_{i=1}^{M} \sum\limits_{j=1}^{M} \eta_{i} \eta_{j} F_{2 s}\left(\omega_{i}, \omega_{j}\right)\right] \\ F_{\text {wave}\_{2d} }(t)=\operatorname{Re}\left[\sum\limits_{i=1}^{M} \sum\limits_{j=1}^{M} \eta_{i} \eta_{j}^{*} F_{2 d}\left(\omega_{i}, \omega_{j}\right)\right] \end{array}\right.$$ (10) 式中:ηi和ηj表示复数域内第i和j个波浪成分的波面升高; F1(ωi)、F2s(ωi, ωj)和F2d(ωi, ωj)分别代表一阶波浪力传递函数、二阶和频及差频波浪力传递函数。
2.1.4 时域耦合模型及运动控制方程
不同于固定式风力机结构,铰接式风力机在风浪作用下平台基础容易发生摇摆运动,而平台基础的运动又会进一步改变载荷作用效果,时空多变的环境载荷与结构响应间存在相互耦合作用。
对于铰接式风力机,结构时域内运动控制方程如式(11)所示,将频域计算得到附加转动惯性矩和势流阻尼利用卷积积分的方式转化为迟滞函数代入到运动方程中,采用四阶龙格库塔数值方法进行求解。
$$ \begin{gathered} \left(I+I_{A}(\infty)\right) \ddot{\theta}+\int\limits_{0}^{t} h(t-\tau) \dot{\theta}(\tau) \mathrm{d} \tau+ \\ C \dot{\theta}+M_{g b}(\theta)=q(t, \theta, \dot{\theta}) \end{gathered}$$ (11) 式中:I为纵摇惯性矩,kg·m2;IA(ω)为附加纵摇惯性矩,kg·m2;C为粘性阻尼系数;Mgb为系统回复力矩,N·m;q为外激励载荷,包括一阶、二阶波浪载荷、拖曳流载荷以及塔柱所受到的风压载荷和叶轮的气动力载荷。
首先初始化结构参数,并通过输入风浪等环境参数生成作用于铰接式风力机系统上的载荷初始条件,将其代入到式(11)的动力学方程中,求解风力机质心处的位移和速度,再将所求解的结构位移和速度传递到风力机桨叶处,基于叶素动量理论,由于基础运动引起桨叶叶素处产生与基础运动相关的诱导速度,这一附加诱导速度的出现改变了叶素处相对入流攻角的大小,从而引起叶素气动载荷的变化,计算受到结构运动影响下的气动载荷及新位置处的静水回复力,将更新后的载荷作为下一时刻步激励带入到动力学方程中进行求解,因此,基础运动与载荷之间存在相互耦合,相互作用关系。
2.2 多目标优化
2.2.1 超平面参考点定义
本文采用基于参考点的非支配排序遗传算法对铰接式基础三目标优化数学模型进行计算。采用结构化生成参考点的方法[11]预定义一组在L-1维超平面上均匀分布的参考点,生成参考点位置主要与目标数L和每个目标划分份数H有关,其中任一参考点在L维坐标系上位置为;
$$ \left\{\begin{array}{l} S=\left(S_{1}, S_{2}, \cdots, S_{L}\right) \\ S_{j} \in\left\{\frac{0}{H}, \frac{1}{H}, \cdots, \frac{H}{H}\right\}, \sum\limits_{j=1}^{L} S_{j}=1 \end{array}\right.$$ (12) 同时定义数组xij∈X,其中i∈(1, L-1),j∈(1, H+L-1),X是关于$ \left\{\frac{0}{H}, \frac{1}{H}, \cdots, \frac{H+L-2}{H}\right\}$个元素的L-1份组合,对于每一个数组xij=xij$ \frac{j-1}{H}$。
对于参考点集S和数组X满足以下关系式,其中sij∈S,xij∈X:
$$ \left\{\begin{array}{l} s_{i j}=x_{i j}-0, j=1 \\ s_{i j}=x_{i j}-x_{i(j-1)}, 1<j<L \\ s_{i j}=1-x_{i(j-1)}, j=L \end{array}\right.$$ (13) 2.2.2 优化设计流程
首先基于静水回复力计算中目标函数的定义,将其转化为关于设计变量的函数表达式;其次确定设计变量范围,由于主体立柱与上部风力机塔柱连接,其最小直径应大于塔柱底部直径,同时参考铰接塔平台及海上风力机结构尺寸,7个设计变量范围为:
$$ \left\{\begin{array}{l} D_{1}, D_{2}, D_{3} \in(5, 30) \mathrm{m} \\ H_{1}, H_{2}, H_{3} \in(5, 20) \mathrm{m} \\ t \in(0.05, 1) \mathrm{m} \end{array}\right.$$ (14) 然后基于遗传算法,初始化生成大小为N的父代种群Pt,通过模拟二进制交叉与多项式变异产生相同大小的子代种群Qt,将2代种群合并为Rt。采用非支配排序法将Rt划分不同支配层(F1, F2, …, FL),定义FL为临界层,从F1层开始构建新的子代种群,根据函数适应度大小确定支配等级并将个体依次保留到不同支配层中,直至种群大小为N,再将新的种群进行遗传迭代,直至满足迭代次数结束计算,优化的具体流程如图 5所示。
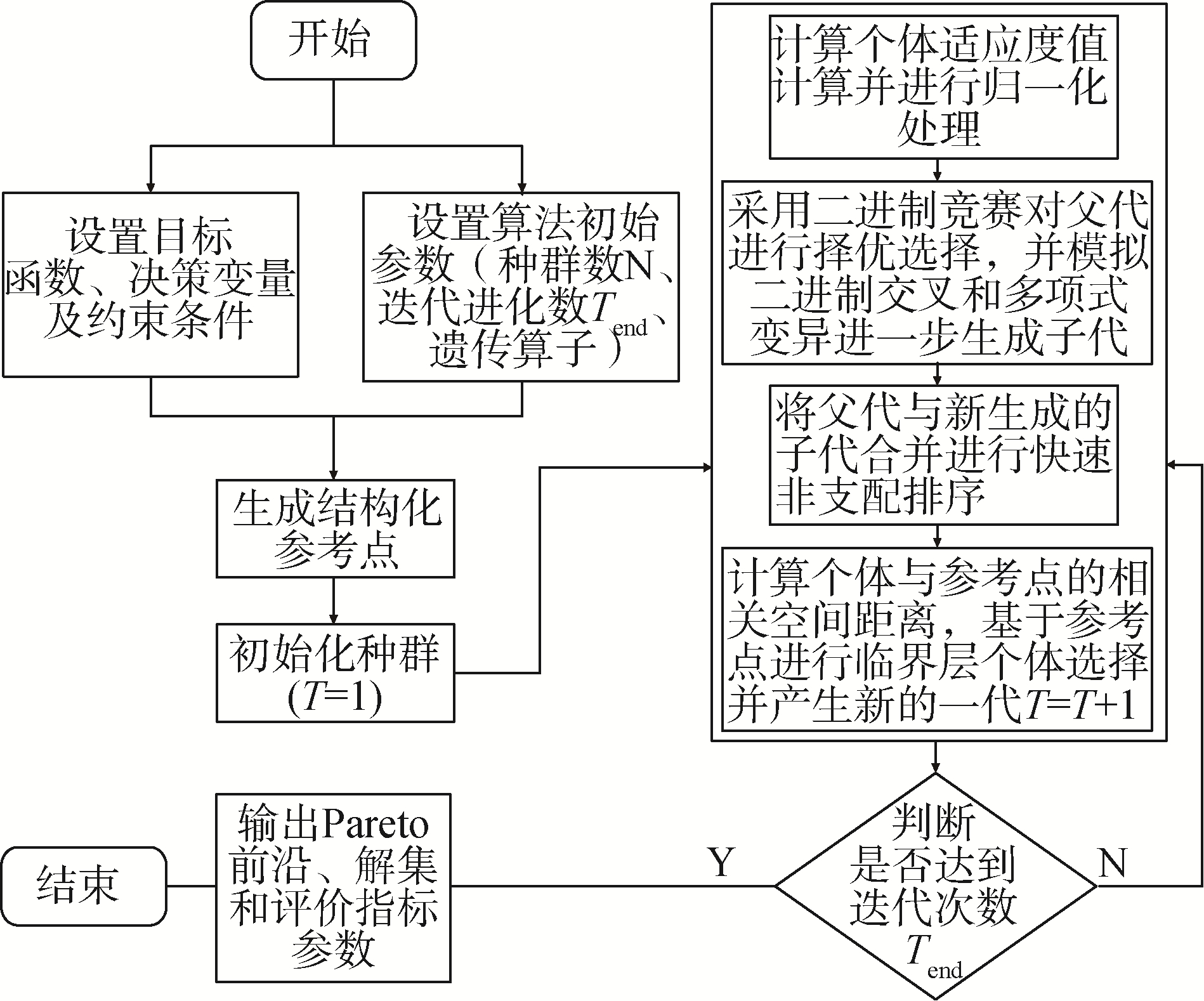 图 5 NSGA-Ⅲ优化流程Fig. 5 Optimization process of NSGA-Ⅲ下载:
全尺寸图片
图 5 NSGA-Ⅲ优化流程Fig. 5 Optimization process of NSGA-Ⅲ下载:
全尺寸图片
2.3 模糊评价
本文采用模糊综合评价方法,基于模糊优选理论,在所确定的三目标函数基础上,对满足多目标优化模型的帕累托解集建立模糊评价准则,确定模糊优选方案的评价指标、权重集及综合评价得分,根据最终评分从帕累托解集中得到最终推荐方案。
本文主要对基础结构重量M、铰接轴承上浮力Fjoint和回复力矩Mgb 3个指标参数进行模糊综合评价,并根据最终优选方案对于不同性能指标的依存度,设立所对应的权重系数,同时由于不同评价指标间存在数量级的差别,在进行模糊评价分析前,对评价指标分别进行归一化处理,得到不同方案下的评价指标矩阵,最终的综合评价得分F为:
$$\begin{array}{l} F=P Q^{-1}=P_{1} Q_{1}+P_{2} Q_{2}+P_{3} Q_{3}\\ \left\{\begin{array}{l} P \in\left(\frac{1}{3}, \frac{1}{3}, \frac{1}{3}\right) \\ Q_{i}=\frac{Q_{i}-Q_{i min }}{Q_{i \max }-Q_{\text {imin }}}, i \in(1, 2, 3) \end{array}\right. \end{array}$$ (15) 式中: F为综合评价得分;P为权重集,本文考虑3个评价指标的优先度相同,权重系数都为1/3;Q为归一化的评价指标矩阵;最终优选方案以最小化综合评价分数为目标。
3. 计算结果与分析
3.1 优化结果分析
基于所建立的三目标优化数学模型,利用Matlab运行环境,编写NSGA-Ⅲ优化程序进行计算分析,得到关于基础质量f1、铰接轴承上浮力f2及回复力矩f3的帕累托前沿,如图 6所示。
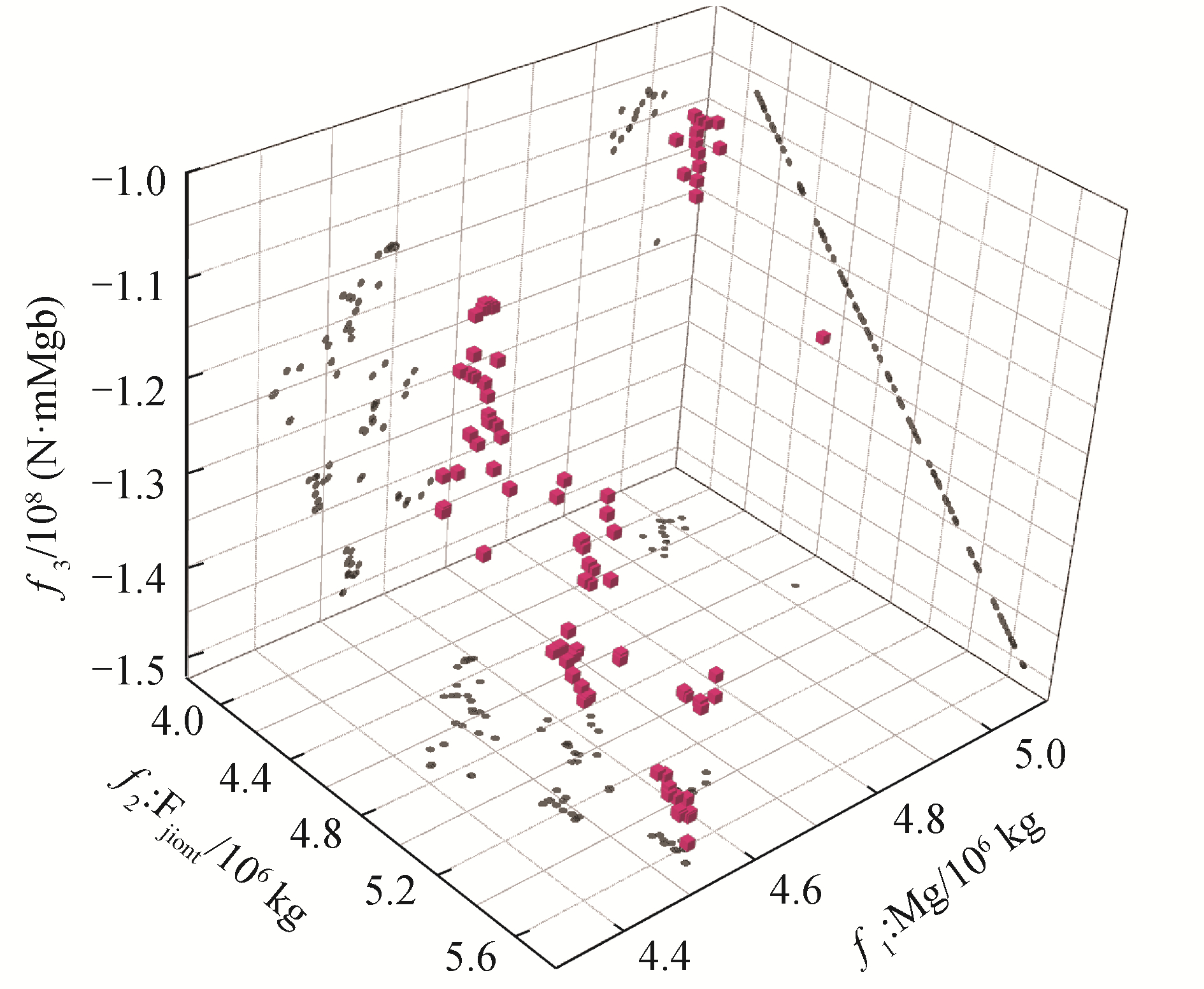 图 6 多目标优化帕累托前沿Fig. 6 Pareto frontier of the multi-objective optimization下载:
全尺寸图片
图 6 多目标优化帕累托前沿Fig. 6 Pareto frontier of the multi-objective optimization下载:
全尺寸图片
从图中可以看出,基础质量、上浮力和回复力矩这3个目标之间相互冲突,相互影响,大多质量较小的方案所对应的轴承上浮力较大,反之则上浮力较小,而回复力矩与两者差值大小相关。从解分布的收敛性和均匀性来看,所得到的Pareto解在f1目标函数上的分布较为集中,Pareto前沿主要集中在(4.4×106, 4.7×106) kg和(4.9×106, 5.0×106) kg范围内;而对于f2和f3目标函数来说,Pareto解的分布较为合理,既满足解在一定范围内的收敛性,同时也能充分表达整个目标域上的分布;总体而言,所得到的Pareto前沿在满足等式和不等式约束前提下,3个目标函数域内的分布特性都得到了充分表达,优化结果符合预期。
基于多目标优化结果,开展模糊评价分析,以f1目标值为基准,针对两收敛区间内解集,考虑设计变量取整,选取满足条件的20组解作为样本数据进行模糊评价计算,根据式(15)计算综合评价分数,并得到最终的设计方案,结果如下表 1所示。
表 1 铰接基础结构参数及目标函数值Table 1 Structural parameters and objective function values项目 数值 项目 数值 中间立柱直径D1/m 6.0 基础质量/kg 4.54×106 压载舱直径D2/m 15.0 质心位置 (0, 0, 29.95) 浮力舱直径D3/m 24.0 浮力/kg 9.55×106 中间立柱高度H1/m 17.0 浮心位置 (0, 0, 31.37) 压载舱高度H2/m 8.0 纵摇惯性矩/(kg·m2) 1.10×1010 浮力舱高度H3/m 15.0 铰接轴承初始上浮力/kN 4.33×104 壁厚t/m 0.07 纵摇固有周期/s 21 3.2 动力响应分析与优化结果验证
以初始设计的50 m作业水深铰接式风力机为参考[17],对比经多目标优化后的结构方案,整体重量减小,浮力增加,静态性能指标有所提升;同时考虑额定风速作业海况,探究风浪流载荷联合作用下的动力响应差异。
3.2.1 计算海况
模拟风、浪和流载荷共向作业,入射波方向沿x轴正向,采用JONSWAP谱生成随机波,考虑一阶及二阶波浪力作用,以风力机轮毂高度处风速为参考风速,利用NPD谱生成湍流风场,具体海况参数如表 2所示。
表 2 海况参数Table 2 Condition paremeters项目 数值 风速(轮毂高度处)/(m/s) 11.4 有义波高/m 3.0 谱峰周期/s 6.3 流速/(m/s) 0.4 探究多目标优化前后2种设计方案在纵摇运动θpitch、发电功率P及铰接轴承受力Fjoint等方面的响应情况。模拟时长为3 h,步长为0.1 s,取中间1 h稳定阶段数据为例作图,再通过傅里叶变换FFT将时历结果转换到频域进行对比分析,相关统计结果如表 3所示。
表 3 时域响应统计结果Table 3 Statistical results of dynamic response方案 统计值 θpitch/(°) P/kW Fjoint/N 参考方案 均值 3.80 3.30×106 3.53e+07 标准差 0.63 8.48×105 2.11×106 最大值 5.34 5.20×106 4.67×107 最小值 1.25 1.26×105 2.80×107 优化方案 均值 3.33 3.31×106 4.33×107 标准差 0.46 7.51×105 2.10×106 最大值 4.23 5.21×106 5.17×107 最小值 1.41 9.22×105 3.64×107 3.2.2 纵摇运动响应
图 7为多目标优化前后2种设计方案在额定风速海况下的纵摇运动时间历程曲线及响应谱。
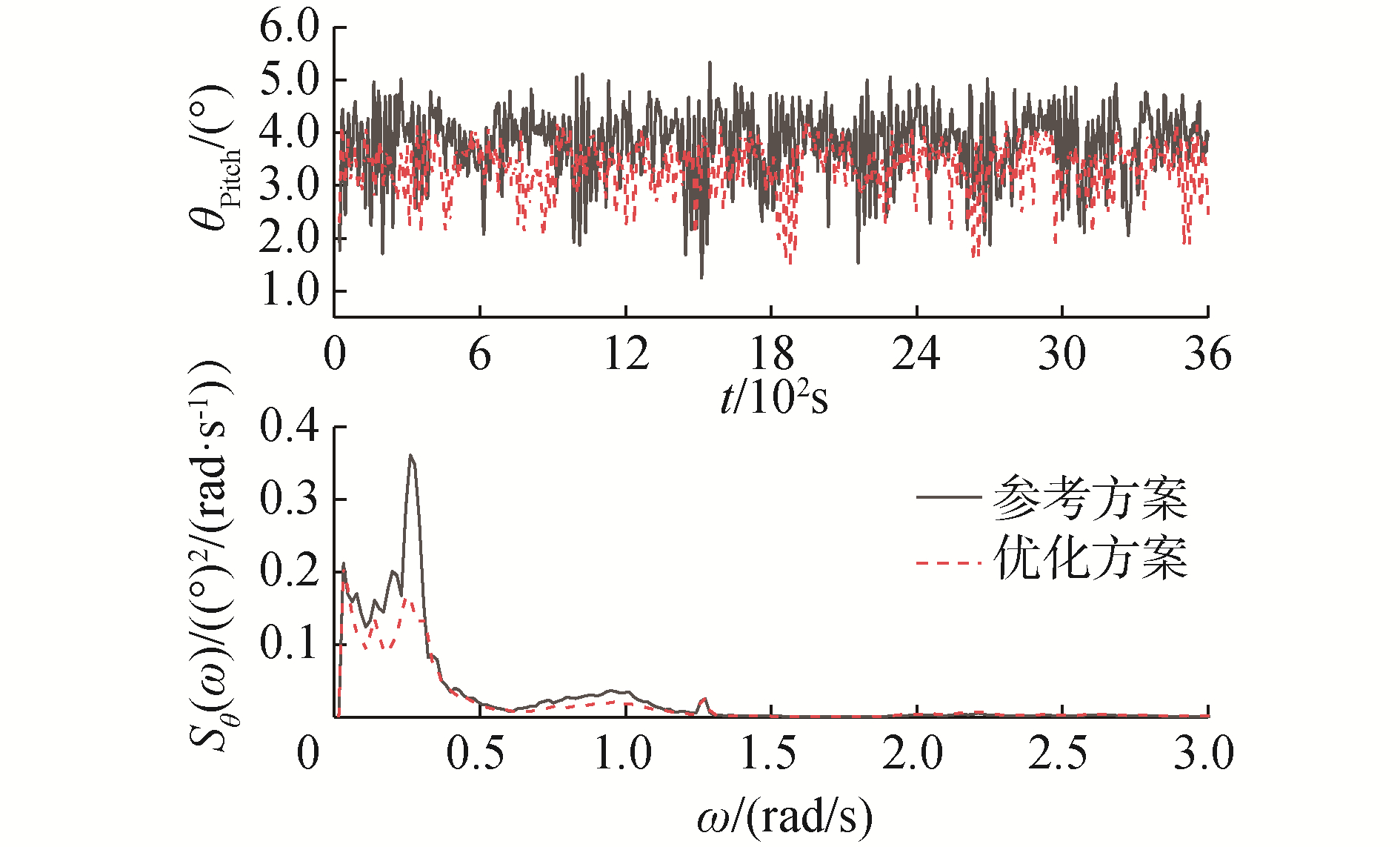 图 7 纵摇运动时间历程及响应谱Fig. 7 Time history and response spectra of pitch motion下载:
全尺寸图片
图 7 纵摇运动时间历程及响应谱Fig. 7 Time history and response spectra of pitch motion下载:
全尺寸图片
从时历图 7和统计表 3中数据可以看出,铰接式基础风力机在额定风速海况下,受随机波及湍流风作用,纵摇运动响应幅值满足风力机设计标准;同时对比参考方案,采用多目标优化后基础纵摇运动均值、标准差及最大值都有效减小,结构运动性能有所提升。
从图 7的响应谱中可以,纵摇运动响应中低频响应起到主导作用,这是由于湍流风的低频特性及二阶差频波浪载荷在低频范围内相互作用从而诱发结构低频共振;优化后的设计方案改变了结构固有频率特性,有效避免了与外激励载荷的相互共振影响。
3.2.3 发电功率
图 8为多目标优化前后2种设计方案在额定风速海况下的发电功率时间历程曲线及响应谱。
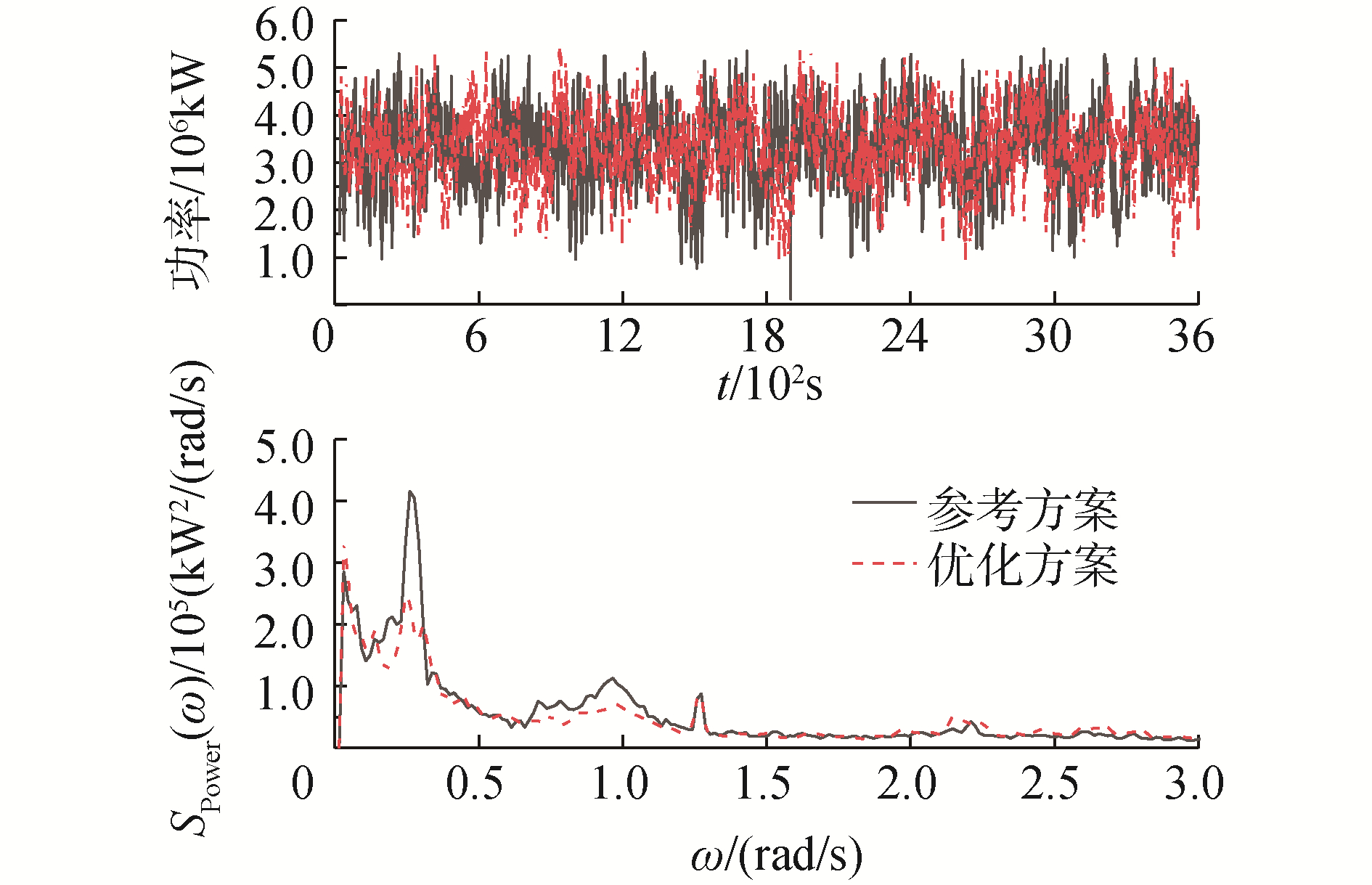 图 8 发电功率时间历程及响应谱Fig. 8 Time history and response spectra of power generation下载:
全尺寸图片
图 8 发电功率时间历程及响应谱Fig. 8 Time history and response spectra of power generation下载:
全尺寸图片
从时历图 8及统计表 3中的数据可以看出,优化前后铰接式风力机在一阶、二阶波浪力及湍流风作用下,发电功率均值约为3.3 MW左右,标准差、最大及最小值相差不大,发电功率主要受入流风速、转子转速及桨距角变化等因素影响,基础结构改变对其作用有限;从图 8响应谱图中可以看出,发电功率响应整体表现出与摆角响应类似的峰值变化,优化后结构有效减小了在低频范围内与外激励载荷的共振。
3.2.4 铰接轴承拉力
图 8为多目标优化前后2种设计方案在额定风速海况下的铰接轴承拉力时间历程曲线及响应谱。
从时历图 9及统计表 3中数据可以看出,2种方案下铰接轴承拉力最大值均不超过5.2×107 N,满足球型铰接轴承承载力要求[16],优化后的基础由于重力减小,浮力增加,铰接轴承所受拉力有所增加;从响应谱图中可以看出,铰接轴承拉力主要受波浪载荷包括一阶及二阶和频波浪载荷作用较大,其中一阶波浪力响应起到主导作用。
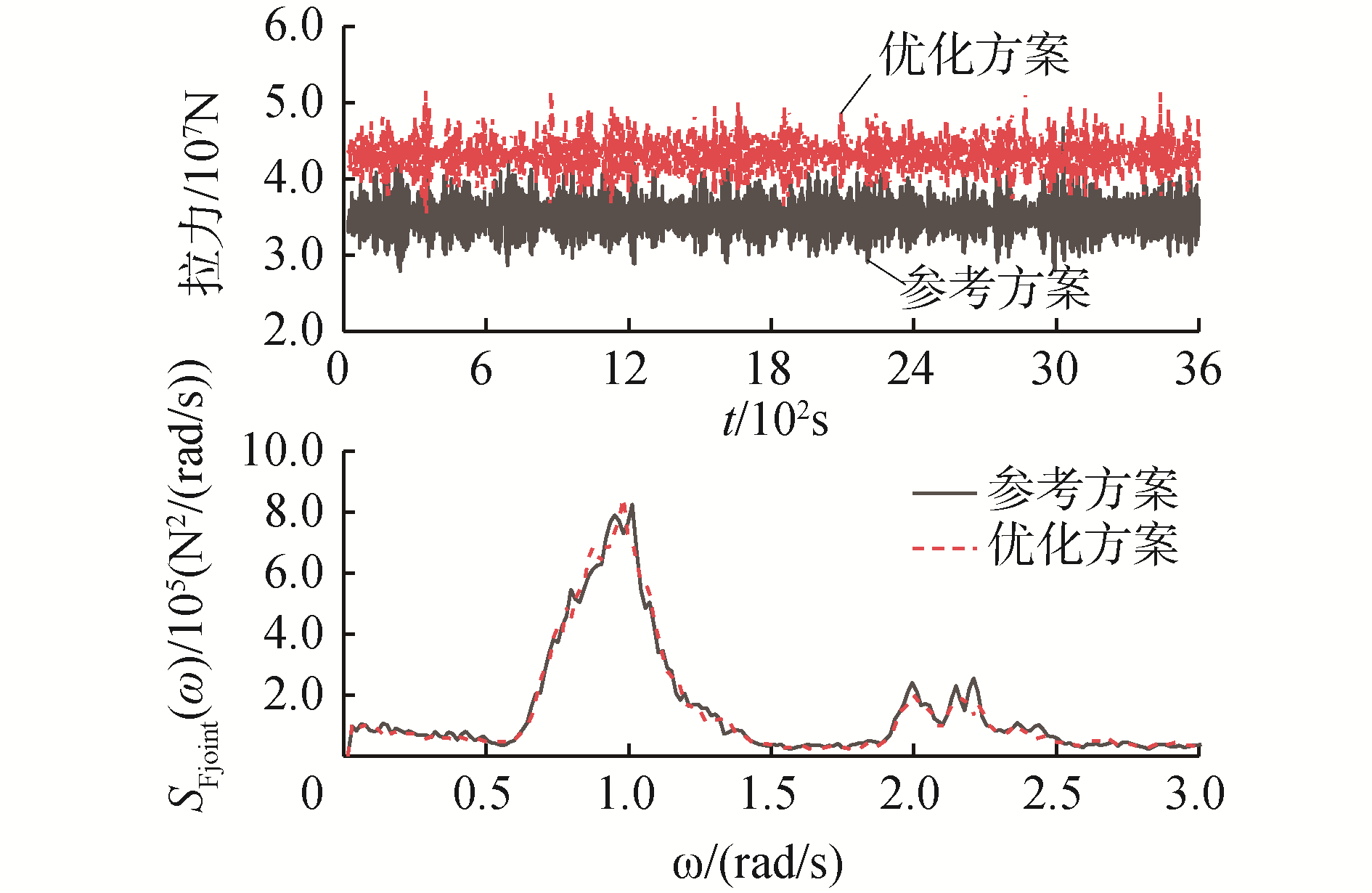 图 9 铰接轴承拉力时间历程及响应谱Fig. 9 Time history and response spectra of joint tension下载:
全尺寸图片
图 9 铰接轴承拉力时间历程及响应谱Fig. 9 Time history and response spectra of joint tension下载:
全尺寸图片
4. 结论
1) 采用NSGA-Ⅲ算法对铰接式风力机基础结构进行多目标优化设计分析,克服了单目标优化的片面性和单一性,可以充分考虑不同客观因素的影响,能够对复杂条件尤其是三目标及以上问题进行全面有效的优化分析;基于多目标优化所得到的相对最优解,采用模糊数学优选的方法,将优化指标量化,通过设定权重系数及评价指标可以充分考虑不同优化因素的影响程度及设计者的偏重,满足不同优化问题的定制化设计需求,得到不同应用场景下的最优解。
2) 通过对比优化前后不同设计方案的静态结构参数可知,优化后基础整体重量有所减小,浮力有所增加,显著提高了结构静稳性;对比动力响应结果可以看出,优化后设计方案改变了结构固有频率特性,有效避免了与外激励载荷发生耦合共振作用。
3) 本文提出了一种基于NSGA-Ⅲ算法与模糊综合评价相结合的优化设计新思路,在满足基础结构及铰接轴承一定安全稳性前提下,有效减小了基础整体重量,从而降低了制造成本,为后续其他基础形式的优化设计工作提供了参考。
-
图 1 铰接式基础风力机实体模型
Fig. 1 Model of articulated foundation offshore wind turbine
下载:
全尺寸图片
图 2 铰接式基础结构模型
Fig. 2 Structural model of articulated foundation
下载:
全尺寸图片
图 3 铰接式风力机结构受力
Fig. 3 Force analysis of articulated offshore wind turbine
下载:
全尺寸图片
图 4 锲形体示意
Fig. 4 Force analysis of articulated offshore wind turbine
下载:
全尺寸图片
图 5 NSGA-Ⅲ优化流程
Fig. 5 Optimization process of NSGA-Ⅲ
下载:
全尺寸图片
图 6 多目标优化帕累托前沿
Fig. 6 Pareto frontier of the multi-objective optimization
下载:
全尺寸图片
图 7 纵摇运动时间历程及响应谱
Fig. 7 Time history and response spectra of pitch motion
下载:
全尺寸图片
图 8 发电功率时间历程及响应谱
Fig. 8 Time history and response spectra of power generation
下载:
全尺寸图片
图 9 铰接轴承拉力时间历程及响应谱
Fig. 9 Time history and response spectra of joint tension
下载:
全尺寸图片
表 1 铰接基础结构参数及目标函数值
Table 1 Structural parameters and objective function values
项目 数值 项目 数值 中间立柱直径D1/m 6.0 基础质量/kg 4.54×106 压载舱直径D2/m 15.0 质心位置 (0, 0, 29.95) 浮力舱直径D3/m 24.0 浮力/kg 9.55×106 中间立柱高度H1/m 17.0 浮心位置 (0, 0, 31.37) 压载舱高度H2/m 8.0 纵摇惯性矩/(kg·m2) 1.10×1010 浮力舱高度H3/m 15.0 铰接轴承初始上浮力/kN 4.33×104 壁厚t/m 0.07 纵摇固有周期/s 21 表 2 海况参数
Table 2 Condition paremeters
项目 数值 风速(轮毂高度处)/(m/s) 11.4 有义波高/m 3.0 谱峰周期/s 6.3 流速/(m/s) 0.4 表 3 时域响应统计结果
Table 3 Statistical results of dynamic response
方案 统计值 θpitch/(°) P/kW Fjoint/N 参考方案 均值 3.80 3.30×106 3.53e+07 标准差 0.63 8.48×105 2.11×106 最大值 5.34 5.20×106 4.67×107 最小值 1.25 1.26×105 2.80×107 优化方案 均值 3.33 3.31×106 4.33×107 标准差 0.46 7.51×105 2.10×106 最大值 4.23 5.21×106 5.17×107 最小值 1.41 9.22×105 3.64×107 -
[1] SHUKLA P K, DEB K. On finding multiple Pareto-optimal solutions using classical and evolutionary generating methods[J]. European journal of operational research, 2007, 181(3): 1630-1652. doi: 10.1016/j.ejor.2006.08.002 [2] COLLETTE Y, SIARRY P. An attempt to classify multiobjective optimization methods[M]//Multiobjective Optimization. Berlin, Heidelberg: Springer Berlin Heidelberg, 2004: 213-225. [3] MESSAC A, MATTSON C A. Generating well-distributed sets of Pareto points for engineering design using physical programming[J]. Optimization and engineering, 2002, 3(4): 431-450. doi: 10.1023/A:1021179727569 [4] MAVROTAS G. Effective implementation of the ε-constraint method in multi-objective mathematical programming problems[J]. Applied mathematics and computation, 2009, 213(2): 455-465. doi: 10.1016/j.amc.2009.03.037 [5] CHEN Wang, CHEN Jian, WU Weitian, et al. A novel multiobjective evolutionary algorithm based on decomposition and multi-reference points strategy[EB/OL]. [2021-10-15]. https://arxiv.org/abs/2110.14124. [6] HU Tayin, HSU Y C, LIAO T Y. Comparisons of a multi-objective compromise weight model and a multi-objective evolutionary algorithm in hazmat transportation route planning[J]. Transportation research record: journal of the transportation research board, 2021, 2675(1): 161-171. doi: 10.1177/0361198120965235 [7] LIU Y, YOU K, JIANG Y, et al. Multi-objective optimal scheduling of automated construction equipment using non-dominated sorting genetic algorithm (NSGA-Ⅲ)[J]. Automation in construction, 2022. [8] SRINIVAS N, DEB K. Muiltiobjective optimization using nondominated sorting in genetic algorithms[J]. Evolutionary computation, 1994, 2(3): 221-248. doi: 10.1162/evco.1994.2.3.221 [9] DEB K, PRATAP A, AGARWAL S, et al. A fast and elitist multiobjective genetic algorithm: NSGA-Ⅱ[J]. IEEE transactions on evolutionary computation, 2002, 6(2): 182-197. doi: 10.1109/4235.996017 [10] DEB K, JAIN H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part Ⅰ: solving problems with box constraints[J]. IEEE transactions on evolutionary computation, 2014, 18(4): 577-601. doi: 10.1109/TEVC.2013.2281535 [11] XIAO-JUN B I, WANG C. A reference point constrained dominance-based NSGA-Ⅲ algorithm[J]. Control and Decision, 2019. [12] 赵萌, 秦金磊, 潘一如, 等. 基于策略权重的模糊多属性决策方法[J]. 控制与决策, 2021, 36(5): 1259-1267. ZHAO Meng, QIN Jinlei, PAN Yiru, et al. Fuzzy multi-attribute decision-making method based on strategy weight[J]. Control and decision, 2021, 36(5): 1259-1267. [13] 魏仲云. 模糊综合评价在可研方案优选中的应用研究[D]. 兰州: 兰州交通大学, 2020. WEI Zhongyun. Study on application of fuzzy comprehensive evaluation in feasibility study scheme optimization[D]. Lanzhou: Lanzhou Jiatong University, 2020. [14] 郝佳姝. 铰接塔平台的动力响应分析[D]. 哈尔滨: 哈尔滨工程大学, 2008. HAO Jiashu. Dynamic response analysis of articulated tower platform[D]. Harbin: Harbin Engineering University, 2008. [15] ZHANG Pei, YANG Shugeng, LI Yan, et al. Dynamic response of articulated offshore wind turbines under different water depths[J]. Energies, 2020, 13(11): 2784. doi: 10.3390/en13112784 [16] 国家质量监督检验检疫总局, 中国国家标准化管理委员会. 桥梁球型支座: GB/T 17955—2009[S]. 北京: 中国标准出版社, 2009. General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China, Standardization Administration of the People's Republic of China. Spherical bearings for bridges: GB/T 17955—2009[S]. Beijing: Standards Press of China, 2009. [17] ZHANG Pei, LI Yan, GU Jiayang, et al. Dynamic response of a conceptual designed articulated offshore wind turbine[J]. Journal of offshore mechanics and Arctic engineering, 2021, 143(2): 024501. doi: 10.1115/1.4048544
