
Experimental study on the mechanism of ice breaking caused by ellipsoid motion under the ice
-
摘要: 为了揭示冰下运动物体兴波破冰机理,探究一种可用于水下航行器破冰上浮的新型破冰技术, 本文以椭球体作为水下航行器的简化模型,利用自行设计制作的一套拖航实验装置,在低温实验室的小型冰水槽中开展了系列破冰实验。实验分析了破冰机理,椭球体在水下近冰面处运动引发冰面的水弹性响应,冰层内的弹性弯曲波与水波耦合为弯曲-重力波,进而导致冰层的挠曲变形。当冰层内部的应力超过其极限应力时,就会导致冰层发生破坏。通过对多种物理参数的影响进行分析,研究表明: 冰层的存在会额外增加模型的拖航阻力,且这种影响与模型的运动速度和浸没深度有关;弯曲-重力波的破冰效果与椭球体运动速度紧密相关,存在一个最优破冰速度,以此速度运动的椭球体具有最高效的破冰能力,使得冰层被破坏区域的面积达到最大;随着椭球体浸没深度的增加,冰层的响应幅值迅速衰减;由椭球体运动兴波导致的冰面破坏模式具有一般规律,横向裂纹先于纵向裂纹出现。Abstract: A series of ice-breaking experiments was conducted in a small ice water tank in a low-temperature laboratory using an ellipsoid as a simplified model of an underwater vehicle and a self-designed towing experiment device to reveal the ice-breaking mechanism induced by waves generated by underwater moving objects and explore a new ice-breaking technology that can be used for underwater vehicle to break the ice and facilitate floating. The ice-breaking mechanism was experimentally analyzed. The ellipsoid motion near the ice surface underwater induced the hydroelastic response of the ice layer. The elastic flexural wave in the ice layer coupling with the water wave was a flexural-gravity wave, which led to the bending deformation of the ice layer. The ice layer would be damaged when the internal stress of the ice layer exceeded its limit. By analyzing the effects of various physical parameters, the results showed that the existence of an ice layer will markedly increase the towing resistance of the model, and the influence is related to the movement speed and immersion depth of the model. The ice-breaking effect of flexural-gravity wave is closely related to the speed of the ellipsoid model, and an optimal ice-breaking speed is observed. The ellipsoid moving at this speed has the most highly efficient ice-breaking capacity, which maximizes the damaged area of the ice layer. The response amplitude of the ice layer rapidly decreases with the increase in immersion depth of the ellipsoid. The failure mode of the ice surface caused by wave generation of the ellipsoid model motion has a general rule, and the transverse cracks appear before the longitudinal cracks.
-
Keywords:
- flexural-gravity wave /
- polar /
- ice breaking /
- hydroelastic response /
- underwater vehicle /
- ellipsoid /
- mechanism experiment /
- ice water tank
-
随着全球气候变暖、海冰加速融化,极地蕴藏的丰富资源和极具价值的北极航道已经将极地潜在价值推到现实高度,世界各国都开始增加对极地方面的研究。由于海冰的存在,破冰是极地海洋结构物面临的一个非常现实且关键的问题,因而也出现了一些关于新型破冰方法方面的研究,如气垫船破冰[1]、气泡破冰[2-3]、水射流破冰[4]、弯曲重力波破冰[5-6]等一系列新型破冰方法。本文针对航行体冰下运动引起弯曲重力波破冰这一问题,以拖航实验探究该破冰机理,采用椭球体作为简化几何外形后的水下航行器模型进行了相关的试验研究。
关于利用椭球体冰下运动引起的弯曲重力波破冰,在解析方法上,通常可以通过设置源汇在水下运动来模拟水下航行体[7-8],研究水下航行体运动引起的冰板弯曲重力波,得到冰板变形的积分表达式,可以计算出不同参数下的弯曲重力波波形。数值方法上,有限元与边界元方法结合是一种有效的求解方法,Kozin等[9]和Zemlyak等[10]都采用这种方法成功求解了水下航行体运动引起冰板弯曲重力波问题,并与试验结果的吻合度较好。
在椭球体冰下运动的模型试验方面,针对水平底面以及水面冰层不覆雪的情况,Kozin等[11]开展了水下航行体冰下运动引起弯曲重力波的模型试验,估算了弯曲重力波引起的冰板应力大小,得到了冰下运动椭球体具有破冰能力的结论,由于试验条件的限制,他们采用的是PVC塑料板模拟的冰板。Zemlyak等[12]在冰池制作出天然模型冰,开展了水下航行体兴波破冰的模型试验,发现水下航行体存在一个最优速度使得冰层破坏最剧烈,将该速度记作临界速度Vcri,且航行体的形状和尺寸对冰层裂纹的形成和发展有很大影响。Zemlyak等[13]通过试验证实了航行体的截面形状对弯曲重力波的曲率有较大影响。Zemlyak等[14]发现水下航行体潜深和长径比对弯曲重力波的影响较为明显,但是这些参数的改变不会影响水下航行体引起最大幅值弯曲重力波时的速度。但是随着水深减小,这一速度会减小[15]。
其次,Pogorelova等[16]采用理论和试验方法研究了冰层上覆盖一层雪时,水下航行体运动引起的弯曲重力波情况,为更好地监测弯曲重力波波形,模型试验中的冰层采用高分子板模拟,发现雪层的存在会减小弯曲重力波的幅值,影响弯曲重力波的破冰能力。Zemlyak等[10]通过数值模拟和模型试验方法研究了水池底面存在一个凸起时对弯曲重力波的影响,发现航行体经过海底的凸起时会使得弯曲重力波的幅值快速增加,同时冰层的破坏程度也更大。
考虑到目前椭球体冰下运动引起弯曲重力波破冰的研究中缺少关注椭球体运动阻力变化的情况,以及国内还尚未开展物体冰下运动引起弯曲重力波破冰的试验研究,因此,本文设计了一套模型试验装置,在小型冰水槽中进行椭球体冰下运动破冰的机理试验,旨在进一步探究弯曲重力波的破冰机理,并分析椭球体在冰下运动破冰时所受阻力的变化趋势。
1. 实验概况
1.1 实验设备
实验依托哈尔滨工程大学的步入式低温实验室进行,室内由压缩机组、冷风机等主要设备构成制冷系统,利用匀压送风棚顶对空气进行降温实现制冷。实验室制冷温度可在-25 ℃~0 ℃调节,设定目标温度后,智能控制系统将根据设置在实验室内部不同区域的4个温度测点的测量数据自行调整制冷机组的运行状态,将温度保持在预先设定的目标温度。
低温实验室内部设有小型冰水池,如图 1所示。水池内表面长296 cm,宽115 cm,高82 cm,水池2条短边上设置平台,可供安放设备。
 图 1 低温实验室和小型冰水池照片Fig. 1 Photos of cold room and ice water tank
图 1 低温实验室和小型冰水池照片Fig. 1 Photos of cold room and ice water tank 下载:
全尺寸图片
下载:
全尺寸图片
1.2 实验装置
图 2是实验装置示意图。选定无级变速电机作为动力输出装置,椭球体模型的两端分别通过牵引绳连接电机的转轴与水池另一端的线轴。该线轴可沿自身中轴线顺畅转动,且轴上预先缠绕较长的牵引绳,电机旋转时将椭球体前端的牵引绳绕收到电机轴上,椭球体后端的牵引绳不断从线轴上被扯出持续变长,由此实现了椭球体模型的前进。而处于水面下的2个定滑轮限定了牵引绳的走向,起到了限制模型垂直方向位移的作用,确保模型在运动时其浸没深度不会变化。
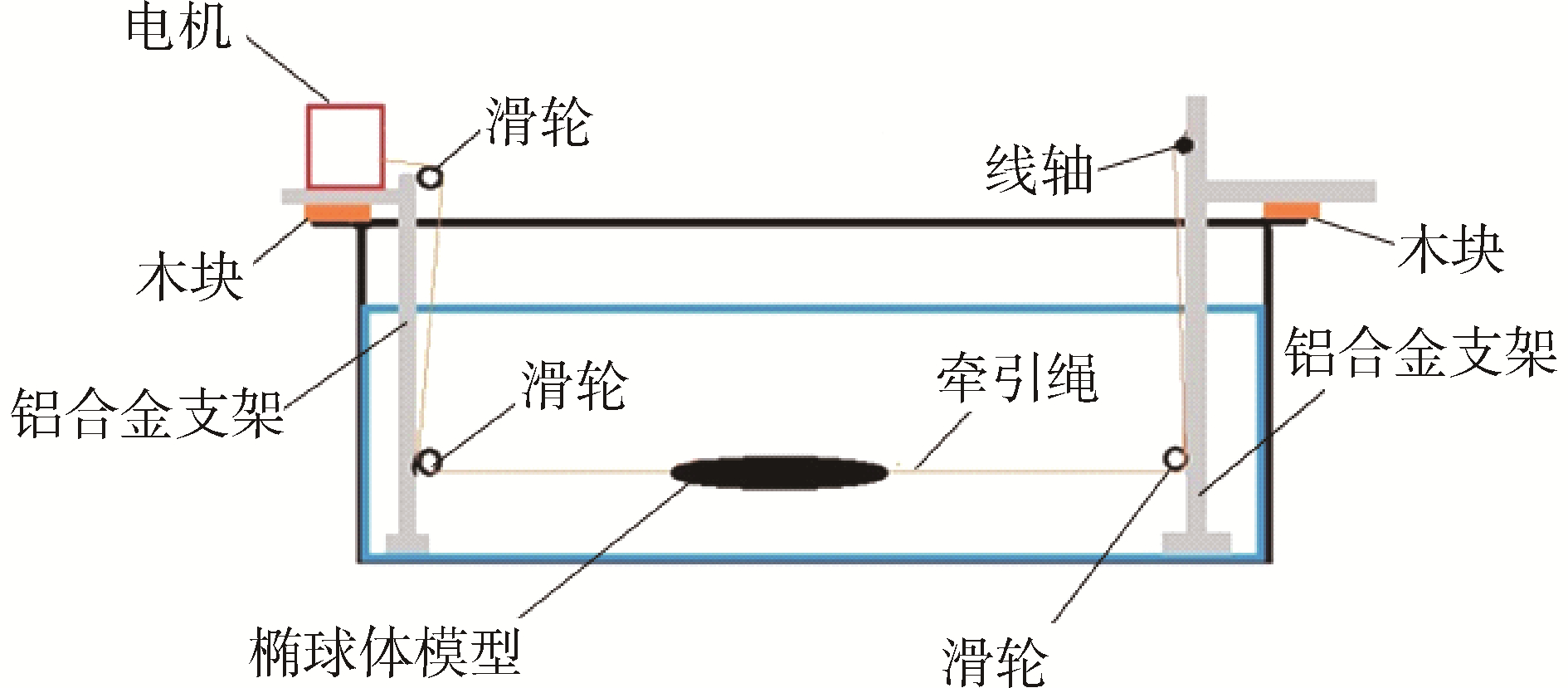 图 2 实验装置示意Fig. 2 Schematic diagram of experimental device下载:
全尺寸图片
图 2 实验装置示意Fig. 2 Schematic diagram of experimental device下载:
全尺寸图片
椭球体模型利用3-D打印技术加工,加工材料选用具有防水性的树脂塑料。模型设计成可拆卸的2部分,模型的厚度维持在5~10 mm内,其内部留有较大空腔,以便后期填塞配重来保证模型稳定漂浮于水中。椭球体模型见图 3,长L=350 mm,最大直径D=80 mm。
 图 3 椭球体模型Fig. 3 Ellipsoid model下载:
全尺寸图片
图 3 椭球体模型Fig. 3 Ellipsoid model下载:
全尺寸图片
关于模型冰,本文实验共用到了2种模型冰:一种为普通淡水冰,其透光度高,便于观察分析拖航过程中椭球体在冰下的运动状态;另一种为水性漆模型冰,在普通淡水冰形成后于其表面涂刷一层白色水性漆,经过这种处理的冰层可以清晰显示出冰面上的裂痕,便于观察分析冰面的毁伤情况。完成水性漆的涂刷后,拖航实验便立即进行,因此水性漆的存在并不会对冰层的力学性质产生影响,可认为二者仅存在外观上的区别。
 图 4 模型冰照片Fig. 4 Photos of model ice下载:
全尺寸图片
图 4 模型冰照片Fig. 4 Photos of model ice下载:
全尺寸图片
1.3 实验工况
本文主要探讨冰层的存在对椭球体水下运动阻力的影响以及椭球体运动速度和潜深对椭球体破冰能力的影响,因此,在整个试验过程将冰层的平均厚度t控制在1.5 mm;实验水池中的水深H取值65 cm。根据电机的转速区间,选取5个不同的电机转速R,分别是3 000、2 300、1 800、1 500和1 000 r/min;椭球体的浸没深度记作S,根据椭球体模型的最大直径,选取3个量级的潜深开展试验,分别为1.5D、2D和2.5D,对应的具体数值为11、15和20 cm。
2. 实验结果分析
实验共进行37个组次, 各组次下的实验工况及参数如表 1。
表 1 实验条件及参数设置Table 1 Experimental conditions and parameters组次编号 电机设定转速
R/(r/min)模型深度
S/cm冰况 1~3 3 000 11, 15, 20 敞水 4~6 2 300 11, 15, 20 敞水 7~9 1 800 11, 15, 20 敞水 10~12 1 500 11, 15, 20 敞水 13~15 1 000 11, 15, 20 敞水 16~18 3 000 11, 15, 20 淡水模型冰 19~21 2 300 11, 15, 20 淡水模型冰 22~24 1 800 11, 15, 20 淡水模型冰 25~27 1 500 11, 15, 20 淡水模型冰 28~30 1 000 11, 15, 20 淡水模型冰 31~33 3 000 11, 15, 20 油漆模型冰 34 2 300 11 油漆模型冰 35 1 800 11 油漆模型冰 36 1 500 11 油漆模型冰 37 1 000 11 油漆模型冰 2.1 阻力分析
在分析椭球体运动破冰之前,先分析水面覆上冰层后对椭球体运动阻力的影响。由于模型尺度较小,阻力测试仪很难安装, 本实验未直接测量椭球体阻力变化,而是采取间接测量法。试验所用电机配有数控面板,电机的转速可通过数控装置调节,根据电机预设转速与实际转速的差值情况可以间接地分析冰下椭球体运动所受流体阻力的情况,转速差越大说明椭球体的航行阻力越大。
在1~30组次的试验结果中,以模型浸没深度为11 cm的工况为例,分别测定层冰工况与敞水工况电机转速的差值,所得数据如表 2所示。以电机设定转速为横坐标,电机转速差为纵坐标,将表 2数据绘制为折线图,如图 5所示。分别以ΔR1、ΔR2表示层冰工况与敞水工况下电机设定转速减去实际转速的差值。第3条曲线ΔR1-ΔR2为层冰工况电机转速差与敞水工况电机转速差的差值曲线,该数值的大小反映了相较于敞水工况,由于冰层导致的模型拖航阻力增加量。
表 2 浸没深度为11 cm时电机转速记录Table 2 Motor speed record at immersion depth of 11 cm电机设定转速
R/(r/min)电机转速差
ΔR/(r/min)冰况 3 000 375 淡水模型冰 2 300 285 淡水模型冰 1 800 216 淡水模型冰 1 500 175 淡水模型冰 1 000 113 淡水模型冰 3 000 255 敞水 2 300 156 敞水 1 800 126 敞水 1 500 100 敞水 1 000 65 敞水 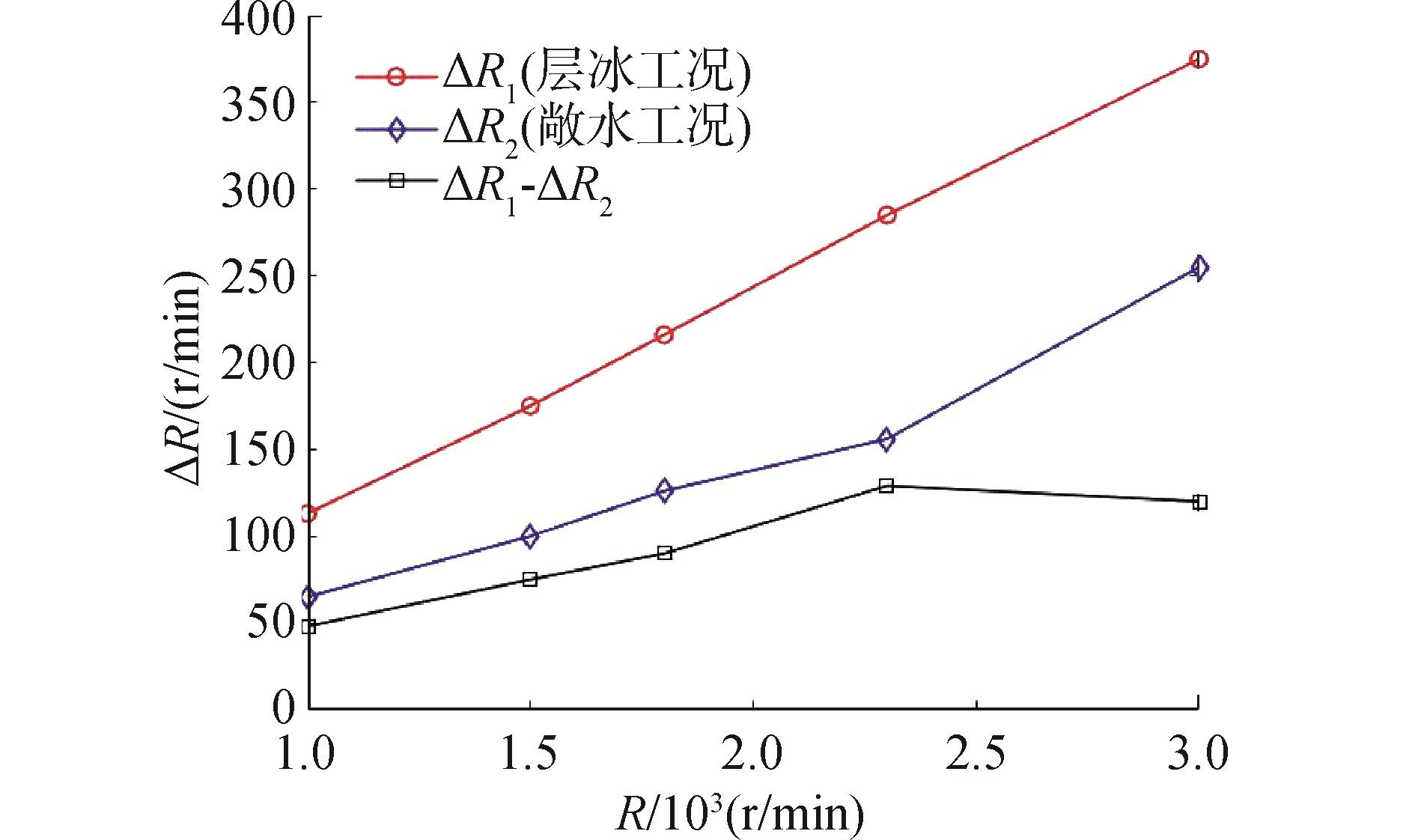 图 5 浸没深度为11 cm时电机转速差对比Fig. 5 Comparison of motor speed difference at immersion depth of 11 cm下载:
全尺寸图片
图 5 浸没深度为11 cm时电机转速差对比Fig. 5 Comparison of motor speed difference at immersion depth of 11 cm下载:
全尺寸图片
从图 5中曲线的变化趋势可知,当自由水面被层冰覆盖后,椭球体在水下运动受到的阻力较敞水工况时更大,表明覆盖在自由水面的层冰对椭球体有增阻效应;高速拖航椭球体模型时,冰层的增阻效应更明显,但随着拖航速度进一步增加,冰层增阻效应的增长趋势明显放缓。
下面进一步分析层冰工况下椭球体在不同潜深时电机转速差随设定转速的变化情况。表 3给出了椭球体潜深为15 cm和20 cm时的电机转速情况,根据表 2和表 3的数据,画出层冰工况下,椭球体不同潜深时的转速差随设定转速的变化曲线,见图 6。由图 6可知,在层冰工况下,当椭球体潜深从1.5D(11 cm)增加到2D(15 cm)时,椭球体受到的流体阻力会急剧减小,而当潜深从2D(15 cm)变化到2.5D(20 cm)时,2条曲线的距离较近,阻力变化不大。表明潜深较小时,阻力对潜深的变化十分敏感,而当潜深较大后,冰面的存在对于椭球体的阻力影响已经较弱。
表 3 浸没深度为15、20 cm电机转速记录Table 3 Motor speed record at immersion depth of 15, 20 cm浸没深度
S/cm电机设定转速
R/(r/min)层冰工况电机转速差
ΔR1/(r/min)敞水工况电机转速差
ΔR2/(r/min)15 3 000 195 127 15 2 300 138 92 15 1 800 106 68 15 1 500 82 54 15 1 000 52 31 20 3 000 150 102 20 2 300 103 69 20 1 800 76 50 20 1 500 57 37 20 1 000 36 24 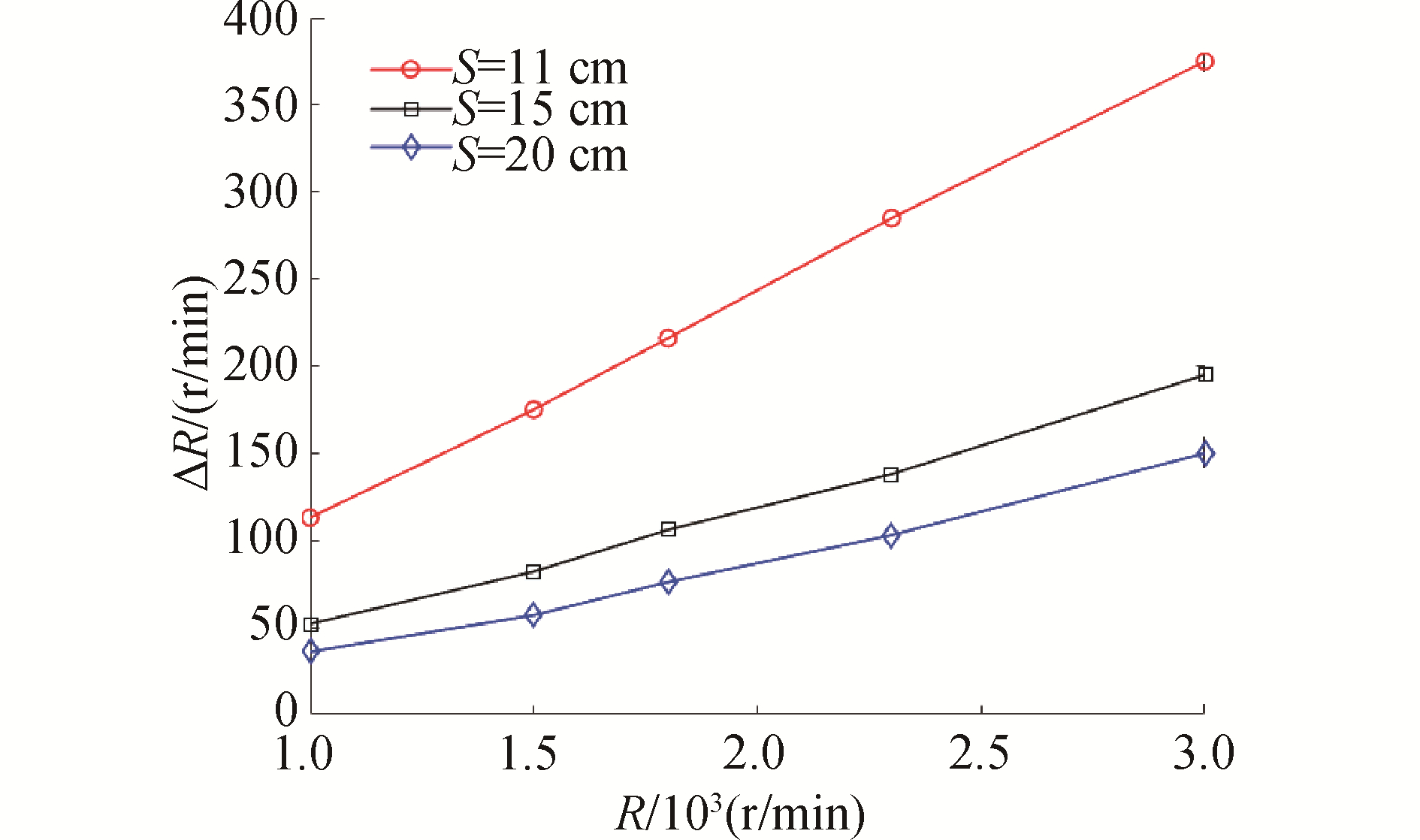 图 6 层冰工况电机转速差对比Fig. 6 Comparison of motor speed difference under ice condition下载:
全尺寸图片
图 6 层冰工况电机转速差对比Fig. 6 Comparison of motor speed difference under ice condition下载:
全尺寸图片
2.2 冰面变形/破坏情况分析
本文在试验过程中采用高速摄像机记录了椭球体的破冰过程,并且在水池池壁上预先制作了刻度标记,如图 7所示,相邻2个刻度标记间隔20 cm。将高速摄影机的影像逐帧导出,确定各个时刻椭球体模型的位置,根据刻度标记计算在已知时间内椭球体运动的距离,由此计算出椭球体的实际平均运动速度。
 图 7 高速摄影图像处理方法Fig. 7 High speed photographic image processing下载:
全尺寸图片
图 7 高速摄影图像处理方法Fig. 7 High speed photographic image processing下载:
全尺寸图片
首先进行浸没深度S为11 cm的系列实验,表 4给出了实验中电机转速与椭球体速度的对应关系。此外,为了观测冰面变形,基于光线反射原理,将双白炽灯管布置于冰面上方,根据冰面反射的灯管变形情况,监测冰面变形情况(如图 8)。
表 4 电机转速与椭球体速度对应关系Table 4 Corresponding relationship between motor speed and ellipsoid speed电机转速
R/(r/min)椭球体运动速度
V/(m/s)3 000 3.45 2 300 2.45 1 800 2.12 1 500 1.48 1 000 1.08  图 8 冰面破坏过程Fig. 8 Ice failure process下载:
全尺寸图片
图 8 冰面破坏过程Fig. 8 Ice failure process下载:
全尺寸图片
首先以3.45 m/s工况为典型工况,以说明冰层在椭球体运动下的变形直至破坏的过程。记录拖航实验开始后几个特定时刻的实验现象,其反映的冰层变化过程如图 8所示。
从图 8可以看到,在拖航初始时刻,冰层是平整的,图 8(a)中可见2个白炽灯管的反射图像都是直线;随着椭球体运动,冰面开始发生小挠曲变形,拖航0.18 s后,如图 8(b)中所示,左侧的灯管图像向上凸起,表明冰面产生了向上的挠度;拖航0.23 s后,随着椭球体进一步运动,图 8(c)中,左侧的灯管图像向下凹陷,表明此处冰面产生了明显的向下的挠度,同时右侧灯管基本都保持平直,表明左侧的挠曲变形是局部现象;当冰面变形过大时,如图 8(d)所示,冰面在向下挠度最大的波谷处发生弯曲破坏,产生一条横向裂纹。随着椭球体模型继续向前运动,如图 8(e)所示,冰层中弯曲重力波继续向前传播,冰面在发生向上大挠度变形的波峰处再次发生弯曲破坏,产生第2道横向裂纹。椭球体模型继续运动,冰面继续以相同模式产生新的横向裂纹,如图 8(f)所示。实验观测到冰面大尺度裂纹均为横向,纵向裂纹尺度较小,其发生时间晚于横向裂纹,存在于相邻横向裂纹的间隙区域。
上述实验现象的可能原因是椭球体诱导的弯曲重力波是三维波系,同时存在横波和散波,但横波系强于散波系。横波能量较强,在椭球体运动方向上造成了一系列冰面横向裂纹;散波能量较弱,难以直接破坏完整冰层,但相邻的横向裂纹将该处冰层切割为了狭长条状冰块,沿散波的运动方向上,长条状冰变得易碎,由此在相邻横向裂纹之间的区域产生了多条纵向裂纹,形成了细密的碎冰区。
在此基础上,继续研究椭球体以不同速度运动时冰面的破坏程度,如图 9所示。当椭球体以1.08 m/s速度运动时,冰面出现了轻微的挠度变化,未观测到明显的冰面波动现象,冰面未发生破坏。当椭球体运动速度为1.48 m/s时,椭球体使层冰发生了破坏,冰面上可观测到2条横向裂纹,但破坏范围仅局限于椭球体起始位置附近的小面积区域。椭球体航速为2.12 m/s时,冰面上出现2处横向裂纹,较之前2组实验,本次实验中的横向裂纹长度明显增加,冰面破坏区域面积更大。椭球体航速为2.45 m/s时,冰面上可观测到5条明显的横向裂纹,横向裂纹的长度接近水池宽度的50%;冰层破坏区域的面积接近水池总面积的50%。当椭球体以3.45 m/s的速度做冰下运动时,冰面的响应情况十分剧烈,共出现了6条明显的横向裂纹且横向裂纹的长度均达到了水池宽度的50%以上;冰层破坏区域的面积达到了水池总面积的50%以上。各组实验中当冰面开始出现裂纹时,均以横向裂纹为先。
 图 9 不同运动速度下椭球体引起的冰面破坏结果Fig. 9 Ice fracture by moving ellipsoid model for different speed下载:
全尺寸图片
图 9 不同运动速度下椭球体引起的冰面破坏结果Fig. 9 Ice fracture by moving ellipsoid model for different speed下载:
全尺寸图片
由于机理试验条件所限,破冰速度无法再次提升,故试验中仅做到3.45 m/s。
为精确表征冰面破坏情况引入2个参数:“冰面破坏区域长度”记作B1与“冰面破坏区域宽度”记作B2,以椭球体拖航前的首部端点位置沿水池长边方向到冰面裂纹最远处的距离表征破坏区域长度,以冰面上出现的横向裂纹最大长度表征破坏区域宽度;整理实验数据后以表 5与图 10反映出冰面破坏程度随椭球体模型运动速度的变化情况。
表 5 浸没深度为11 cm冰面破坏情况记录Table 5 Record of ice damage with immersion depth of 11 cm模型运动速度
V/(m/s)破坏区域长度
B1/cm破坏区域宽度
B2/cm3.45 125 86.3 2.45 102 46 2.12 62 40.3 1.48 38 31.6 1.08 0 0  图 10 冰面破坏程度变化曲线Fig. 10 Curves of ice damage degree change下载:
全尺寸图片
图 10 冰面破坏程度变化曲线Fig. 10 Curves of ice damage degree change下载:
全尺寸图片
通过对以上几组实验结果的分析可以发现,弯曲重力波对冰层的破坏效果随椭球体模型运动速度的改变而变化,当V取为3.45 m/s时,其对冰层的破坏效果最强;V取为2.45 m/s时,其对冰层仍有较强的破坏效果;V取值2.12 m/s时,仅对冰层造成了较弱的破坏;随着V进一步减小至1.48 m/s,冰层仅出现了微弱的损伤;当V减小至1.08 m/s时,冰层仅出现了轻微变形,未发生破坏。
在V增长至2.45 m/s之前,随着V的增大冰面破坏程度迅速增大;在V从2.45 m/s增至3.45 m/s的阶段,冰面破坏程度随模型运动速度的增加而增大的趋势明显放缓。该趋势与前文冰层增阻效应的变化趋势一致。
实际上,根据已发表文献的结论,水下运动椭球体的破冰能力随着速度的增加呈现出先变大后变小的趋势[12-16],存在最优的破冰速度即临界速度。鉴于本文的试验条件,目前并无法直接从实验结果判定临界速度的大小,只能根据统计数据的增长趋势推测大致区间。
本文根据解析方法估计临界速度的大小。关于临界速度的机理可解释为:破冰过程可视为能量积累过程,航行器以临界速度运动时,其始终位于首前方的波峰后,对兴波起持续的推波作用,在冰面上逐渐兴起幅值较大的波动,进而引发冰面上最大程度的响应。因此,临界速度值取决于冰层中弯曲重力波的能量传导速度。
关于临界速度的理论值,在实验水池水深不超过40 cm的浅水情况下,临界速度可近似为水波的群速度,计算式为[15]:
$$ V_{\text {cri }} \approx \sqrt{g H} $$ (1) 式中:Vcri即临界速度;g为重力加速度;H为水池水深。
在无限水深条件下临界速度迅速增大,计算式为[11]:
$$ V_{\mathrm{cri}} \approx \sqrt{D_i g^2} / \rho_i t $$ (2) $$ D_i=E t^3 / 12\left(1-v^2\right) $$ (3) 式中:g为重力加速度;ρi为冰的密度,取值900 kg/m3;t为冰层厚度;Di为冰层的抗弯刚度;E为冰层的杨氏模量;υ为层冰泊松比,取值0.3。
本文选取的实验水深介于浅水工况与深水工况之间,以式(1)估算的临界速度为2.52 m/s,以式(2)估算的临界速度为4.69 m/s。针对本文中的实验设计,其临界速度所在区间为2.52 m/s < Vcri < 4.69 m/s,结合实验所得冰层增阻效应以及冰层破坏程度随航速的变化趋势,可认为实验现象与理论估算结果较为吻合。
下面讨论浸没深度变化的影响。本文选择V=3.45 m/s的破冰效果最强的工况为研究对象,将浸没深度S增加至15 cm和20 cm。图 11给出了S=15 cm时冰面的变形情况。从图中可见冰面并没有破碎,且已经很难观察到明显的冰面变形,说明浸深增大后椭球体破冰效果急剧减弱。S=20 cm的情况基本类似,这里不再赘述。
 图 11 浸没深度为15 cm冰面变形情况Fig. 11 Ice deformation view at immersion depth of 15 cm下载:
全尺寸图片
图 11 浸没深度为15 cm冰面变形情况Fig. 11 Ice deformation view at immersion depth of 15 cm下载:
全尺寸图片
3. 结论
1) 相较于敞水工况,层冰工况下的拖航实验中,冰层的存在会额外增加模型的运动阻力。冰层增阻效应与模型运动速度V、模型浸没深度S密切相关。冰层增阻效应随着V的增加而增长,但在高速状态下增长趋势放缓。冰层增阻效应随着模型浸没深度S的增加而迅速衰减,以椭球体模型最大直径D为参数,S≥2D时,冰层对模型运动阻力的影响已十分微弱。
2) 物体水下运动兴波破冰的机理在于引发冰面的挠曲波动,冰层内的弯曲重力波为三维波系,其中能量较高的横波使冰面上先产生大尺度横向裂纹;在相邻2条横向裂纹间隙区域,散波的作用效果显著,从而使冰面产生大量纵向裂纹,形成细碎浮冰区。
3) 弯曲-重力波的破冰效果与椭球体运动速度紧密相关。物体以临界速度Vcri在冰下运动时会对冰面造成最大程度的破坏,在有限水深工况下,临界速度分布区间可通过公式$ \sqrt{g H} \leqslant V_{\text {cri }} \leqslant \sqrt{D_i g^2} / \rho_i t $进行估算。
4) 冰面的响应幅值随着模型浸没深度S的增加迅速衰减,反映了水下运动物体的水面兴波随模型浸没深度S的增加迅速衰减。以椭球体模型最大直径D为参数,S取值1.5D时冰面发生明显破坏;S≥2D时,冰面仅有轻微挠度响应,未发生破坏。
-
图 1 低温实验室和小型冰水池照片
Fig. 1 Photos of cold room and ice water tank
下载:
全尺寸图片
图 2 实验装置示意
Fig. 2 Schematic diagram of experimental device
下载:
全尺寸图片
图 3 椭球体模型
Fig. 3 Ellipsoid model
下载:
全尺寸图片
图 4 模型冰照片
Fig. 4 Photos of model ice
下载:
全尺寸图片
图 5 浸没深度为11 cm时电机转速差对比
Fig. 5 Comparison of motor speed difference at immersion depth of 11 cm
下载:
全尺寸图片
图 6 层冰工况电机转速差对比
Fig. 6 Comparison of motor speed difference under ice condition
下载:
全尺寸图片
图 7 高速摄影图像处理方法
Fig. 7 High speed photographic image processing
下载:
全尺寸图片
图 8 冰面破坏过程
Fig. 8 Ice failure process
下载:
全尺寸图片
图 9 不同运动速度下椭球体引起的冰面破坏结果
Fig. 9 Ice fracture by moving ellipsoid model for different speed
下载:
全尺寸图片
图 10 冰面破坏程度变化曲线
Fig. 10 Curves of ice damage degree change
下载:
全尺寸图片
图 11 浸没深度为15 cm冰面变形情况
Fig. 11 Ice deformation view at immersion depth of 15 cm
下载:
全尺寸图片
表 1 实验条件及参数设置
Table 1 Experimental conditions and parameters
组次编号 电机设定转速
R/(r/min)模型深度
S/cm冰况 1~3 3 000 11, 15, 20 敞水 4~6 2 300 11, 15, 20 敞水 7~9 1 800 11, 15, 20 敞水 10~12 1 500 11, 15, 20 敞水 13~15 1 000 11, 15, 20 敞水 16~18 3 000 11, 15, 20 淡水模型冰 19~21 2 300 11, 15, 20 淡水模型冰 22~24 1 800 11, 15, 20 淡水模型冰 25~27 1 500 11, 15, 20 淡水模型冰 28~30 1 000 11, 15, 20 淡水模型冰 31~33 3 000 11, 15, 20 油漆模型冰 34 2 300 11 油漆模型冰 35 1 800 11 油漆模型冰 36 1 500 11 油漆模型冰 37 1 000 11 油漆模型冰 表 2 浸没深度为11 cm时电机转速记录
Table 2 Motor speed record at immersion depth of 11 cm
电机设定转速
R/(r/min)电机转速差
ΔR/(r/min)冰况 3 000 375 淡水模型冰 2 300 285 淡水模型冰 1 800 216 淡水模型冰 1 500 175 淡水模型冰 1 000 113 淡水模型冰 3 000 255 敞水 2 300 156 敞水 1 800 126 敞水 1 500 100 敞水 1 000 65 敞水 表 3 浸没深度为15、20 cm电机转速记录
Table 3 Motor speed record at immersion depth of 15, 20 cm
浸没深度
S/cm电机设定转速
R/(r/min)层冰工况电机转速差
ΔR1/(r/min)敞水工况电机转速差
ΔR2/(r/min)15 3 000 195 127 15 2 300 138 92 15 1 800 106 68 15 1 500 82 54 15 1 000 52 31 20 3 000 150 102 20 2 300 103 69 20 1 800 76 50 20 1 500 57 37 20 1 000 36 24 表 4 电机转速与椭球体速度对应关系
Table 4 Corresponding relationship between motor speed and ellipsoid speed
电机转速
R/(r/min)椭球体运动速度
V/(m/s)3 000 3.45 2 300 2.45 1 800 2.12 1 500 1.48 1 000 1.08 表 5 浸没深度为11 cm冰面破坏情况记录
Table 5 Record of ice damage with immersion depth of 11 cm
模型运动速度
V/(m/s)破坏区域长度
B1/cm破坏区域宽度
B2/cm3.45 125 86.3 2.45 102 46 2.12 62 40.3 1.48 38 31.6 1.08 0 0 -
[1] 薛彦卓, 曾令东, 刘仁伟. 气垫船破冰能力研究[J]. 华中科技大学学报(自然科学版), 2018, 46(7): 89-93. doi: 10.13245/j.hust.180717 XUE Yanzhuo, ZENG Lingdong, LIU Renwei. Research on icebreaking ability of hovercraft[J]. Journal of Huazhong University of Science and Technology (natural science edition), 2018, 46(7): 89-93. doi: 10.13245/j.hust.180717 [2] NI B Y, PAN Y T, YUAN G Y, et al. An experimental study on the interaction between a bubble and an ice floe with a hole[J]. Cold regions science and technology, 2021, 187: 103281. doi: 10.1016/j.coldregions.2021.103281 [3] YUAN G Y, NI B Y, WU Q G, et al. An experimental study on the dynamics and damage capabilities of a bubble collapsing in the neighborhood of a floating ice cake[J]. Journal of fluids and structures, 2020, 92: 102833. doi: 10.1016/j.jfluidstructs.2019.102833 [4] YUAN G Y, NI B Y, WU Q G, et al. Ice breaking by a high-speed water jet impact[J]. Journal of fluid mechanics, 2022, 934: 401. [5] XUE Y Z, ZENG L D, NI B Y, et al. Hydroelastic response of an ice sheet with a lead to a moving load[J]. Physics of fluids, 2021, 33(3): 037109. doi: 10.1063/5.0037682 [6] ZENG L D, KOROBKIN A A, NI B Y, et al. Moving load in an ice channel with a crack[J]. Applied ocean research, 2022, 121: 103086. doi: 10.1016/j.apor.2022.103086 [7] POGORELOVA A V, KOZIN V M. Flexural-gravity waves due to unsteady motion of point source under a floating plate in fluid of finite depth[J]. Journal of hydrodynamics, ser B, 2010, 22(5): 71-76. [8] POGORELOVA A V, KOZIN V M, ZEMLYAK V L. Motion of a slender body in a fluid under a floating plate[J]. Journal of applied mechanics and technical physics, 2012, 53(1): 27-37. doi: 10.1134/S002189441201004X [9] KOZIN V M, CHIZHUMOV S D, ZEMLYAK V L. Influence of ice conditions on the effectiveness of the resonant method of breaking ice cover by submarines[J]. Journal of applied mechanics and technical physics, 2010, 51(3): 398-404. doi: 10.1007/s10808-010-0054-6 [10] ZEMLYAK V L, KOZIN V M, CHIZHIUMOV S D, et al. The influence of the bottom contour on the deformed state of the ice cover due to the motion of the submarine[J]. Applied ocean research, 2019, 87: 204-210. doi: 10.1016/j.apor.2019.03.020 [11] KOZIN V M, ONISHCHUK A V. Model investigations of wave formation in solid ice cover from the motion of a submarine[J]. Journal of applied mechanics and technical physics, 1994, 35(2): 235-238. doi: 10.1007/BF02369179 [12] ZEMLYAK V, POGORELOVA A, KOZIN V. Influence of peculiarities of the form of a submarine vessel on the efficiency of breaking ice cover[C]// Twenty-third International Offshore and Polar Engineering. Alaska, 2013: 1252-1258. [13] ZEMLYAK V, KOZIN V, BAURIN N O, et al. Influence of peculiarities of the form of a submarine vessel on the parameters of generated waves in the ice motion[C]// Twenty-fourth International Ocean and Polar Engineering Conference. [S. l. ], Korea, 2014: 1135-1140. [14] ZEMLYAK V L, KOZIN V M, BAURIN N O. Influence of peculiarities of the form of a submerged body on the parameters of generated waves in the ice motion[J]. IOP conference series: earth and environmental science, 2018, 193: 012024. doi: 10.1088/1755-1315/193/1/012024 [15] POGORELOVA A V, ZEMLYAK V L, KOZIN V M. Moving of a submarine under an ice cover in fluid of finite depth[J]. Journal of hydrodynamics, 2019, 31(3): 562-569. doi: 10.1007/s42241-018-0143-1 [16] POGORELOVA A V, ZEMLYAK V L, KOZIN V M. Body motion in liquid under ice plate with snow cover[J]. Applied ocean research, 2019, 84: 32-37. doi: 10.1016/j.apor.2018.12.014
