 2016, Vol. 19
2016, Vol. 19
2. 北京卫星环境工程研究所,北京 100094
2. Beijing Institute of Spacecraft Environment Engineering, Beijing 100094, China
数字人体建模(digital human modeling,DHM)技术是用数字人来代表实际人员并将其导入到虚拟环境中进行工效分析和安全预测。这种技术克服了传统人机工效评价需要在现场进行、缺乏科学测量的缺点。运用DHM技术,可以在产品的研发阶段注重其人机工效的分析和设计,及时发现人在后期产品使用过程中的问题,并进行改正以达到缩短研发周期,降低成本的目的。数字人体建模软件很多,例如JACK,DELMIA,SAFEWORK等,目前国内外相关学者利用DHM技术做了很多人机工效研究工作。在国内,苏润娥等[1]通过JACK软件对驾驶舱的内的布局设计进行人机工效分析,重点对可达域和可视域进行评价并提出相关改进意见。卢晓军等[2]、彭晓军等[3]在产品设计中考虑了维修性,提供了分析产品维修性的人机工效方法。国外Chaffin[4]对人的工作任务进行姿势预测和动作仿真,并对工作环境进行设计。Demirel等[5]给出了DHM技术在工业领域的典型应用,包括产品设计,运动仿真和教育培训。本文利用DHM技术,通过JACK软件对返回舱充氧扳手的安装过程进行人机工效学分析,并根据分析结果提出了改进方案,达到了提高充氧扳手安装精度的目的。
JACK是由美国宾夕法尼亚大学的人体建模和仿真中心开发的人机工效分析软件,该软件可以实现三维仿真、数字人体建模以及人机工效分析。JACK可以导入用户自行创建的CAD三维模型,其内置数字人模型数据库适用于大多数国家并且支持精确的数字人人体尺寸自定义功能,可以根据反向运动学原理快捷地调整数字人的姿势,通过内置的公式进行力量的判定和分析。
本文将返回舱和操作过程中各种工具的PRO/E模型导入到JACK软件中并进行工作场景布置,通过JACK建立了百分位为5、50、95的操作人员数字人模型,对返回舱充氧扳手安装过程进行仿真分析,重点分析了操作过程中返回舱、人体、操作工具之间的碰撞,操作过程中人的可视域以及人体的受力疲劳分析。对操作过程中不符合人机工效学原理的地方提出了改进意见,保证了返回舱充氧扳手安装精度。
1 返回舱充氧扳手安装过程描述和问题分析 1.1 返回舱充氧扳手安装过程返回舱充氧阀是载人飞船环控生保分系统生保分系统的重要设备,其主要功能是作为手动截止阀和氧气加注接口。返回舱充氧扳手的安装共需两人。返回舱位于总装操作平台内的第2~4层之间。第2层平台地板与天花板(即第3层平台地板背面)距离约1 880 mm。返回舱充氧阀安装法兰位于返回舱侧壁上并且与侧壁平行,其外螺纹接口轴线垂直于侧壁,与水平方向有7度的夹角,充氧阀舱外阀口中心部位距离第2层平台天花板约130 mm。
安装过程中工人先用套筒扳手拆下充氧阀堵头,然后将充氧扳手的轴六方对中插入充氧阀阀杆的六方内,再将外套螺母与充氧阀口外螺纹对中并手动拧紧并检查对中情况,最后使用力矩扳手对充氧扳手外套螺母进行测力。标准安装示意图如图 1。充氧扳手的外形尺寸约为240 mm×150 mm×75 mm,自重1.976 kg。

|
图 1 充氧扳手安装说明 Fig. 1 The introduction of oxygenation wrench installation |
在返回舱充氧扳手安装过程中,整个操作空间相对狭小,工人、操作工具与平台和返回舱侧壁均有可能产生碰撞;安装过程中工人头部空间很小,视野会受影响;充氧扳手的自重比较大,在与充氧阀连接前已连接底面管路,安装过程中会受到外力牵引;充氧阀管口轴线不是水平的,在水平方向向上倾斜7度。综上原因,充氧扳手管接头对中操作和螺纹连接工况较为恶劣,容易造成螺纹咬扣现象。因此要对返回舱充氧扳手的安装过程进行人机工效分析,一方面有利于提高充氧扳手安装精度;另一方面降低操作人员的疲劳。
2 返回舱充氧扳手安装过程建模与仿真在仿真分析之前需要进行模型创建,包括实体模型和数字人模型。建模过程需要考虑人机环中的各种因素,针对相应的因素,本文用JACK创建数字人模型,PRO/E创建实体模型,并使模型符合真实情况。当实体模型创建好后将其导入到JACK中与JACK创建的数字人模型共同构成仿真环境,仿真之后便可根据JACK中提供的人机工效分析工具进行碰撞、可视性和疲劳分析[6]。图 2为系统分析和改进流程。

|
图 2 建模仿真和人机工效分析流程 Fig. 2 Modeling, simulation and ergonomics analysis process |
本文运用PRO/E创建了返回舱三维模型和总装平台,并将其保存为IGS格式导入到JACK中形成仿真环境。除返回舱之外,其他三维模型有充氧扳手、套筒扳手、开口呆扳手和测力扳手。
2.2 数字人模型创建JACK软件中提供了丰富的人体数据库,并将人体尺寸按照5个百分位缩放。本文根据JACK提供的人体数据库,从CHINESE数据库中分别建立了5%、50%和95%的主操作人员数字人模型,这3个百分位基本代表了中国男性矮、中、高3个身高水平[7]。
2.3 过程仿真根据实际操作人员的工作流程进行工作过程仿真。在仿真之前需要对虚拟环境进行优化调整,之后利用JACK中的Animation模块进行仿真,通过human pose,figure move和path walk等操作生成充氧扳手安装动画,图 3为系统初始环境和仿真界面。

|
图 3 系统仿真界面 Fig. 3 System simulation interface |
充氧扳手安装流程如下。
1) 工人选择充氧阀附近合适位置站位,用套筒扳手拆下充氧阀堵头;
2) 安装充氧扳手,先将充氧扳手轴六方对中插入充氧阀阀杆的六方内;
3) 将充氧扳手外套螺母与充氧阀口外螺纹对中并手动拧紧;
4) 使用力矩扳手对充氧扳手外套螺母进行测力;
在上述过程中另一工人进行工具传递和辅助定位工作。
3 返回舱充氧扳手安装过程人机工效分析充氧扳手安装是典型装配问题,目前关于装配作业的评价标准资料很少,因装配和维修有许多相似性,参照维修中的人机工程准则需要考虑可达性、可视性、作业空间的合理性和舒适度[8]。可达性是指操作时接近不同组成部分的难易程度。由于充氧扳手安装是非复杂装配序列,从前面仿真过程可以看出,工人手臂可直接到达装配位置,因此本文不作可达性分析的介绍。可视性是指操作时装配位置是否可见。作业空间是指人在作业时所需要的操作活动空间,以及机器设备、机具和作业对象(产品)所占有的空间,充氧扳手的安装需要考虑人体和工具的作业空间是否足够[9]。舒适度是人对自然的主观感受,受多种因素(包括环境、物理及生理因素)的影响;不同的工作环境、作业强度、作业姿势会造成不同的舒适感觉[10]。
基于1.2节提出的充氧扳手安装存在的人机工效问题和2.3节充氧扳手安装过程的仿真动画结果,结合JACK中提供的分析工具,在虚拟安装拆卸仿真过程中对工人操作过程中的干涉(碰撞检测)、可视性、下背部疲劳人机工效指标进行了分析,对操作环境进行了改善,实现操作的舒适性,保证安装过程的精度。
3.1 碰撞分析返回舱充氧阀舱外接口位于舱壁内,不是凸出在返回舱侧壁。并且整个操作平台空间狭小,工人在充氧扳手安装过程中要考虑人体的静态和动态尺寸,以及作业空间是否合理。在本文的研究中由于工作空间受限,以是否碰撞作为检测指标[11]。用JACK提供的碰撞检测算法对95%数字人操作过程进行检测[12]。主要检测部位和检测结果如表 1所示。
| 表 1 安装过程中各个实体碰撞检测结果 Tab. 1 The collision detection results of entities in installation |
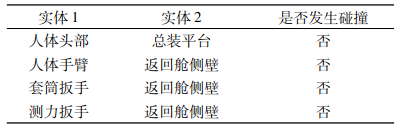
通过表 1可以看出充氧扳手安装过程中人和工具的操作空间均适合。
3.2 可视性分析工人在进行充氧扳手安装时是站立工作的。根据中国控制中心人机工程设计导则中视野与视区划分的标准[13],当人体处于自然站立姿态时,头与轴线的前倾角是15°,视线对水平的下倾角为30°,此时工作的最佳垂直视野为水平线下15°至水平线下45°。操作人员在进行充氧扳手安装时,视野较差会影响充氧扳手与充氧阀的对中性。为了保证操作人员在工作时的质量,装配位置应当处于人的最佳垂直视野内。因此在进行可视性分析时,选取的“view cone”的值为45°,并通过“eye view window”来分析5%、50%、95%操作人员数字人在虚拟环境下装配视图[14]。
对于不同百分位的数字人进行充氧扳手安装时,安装位置均不在工人的最佳视野区域内,视野受到限制(如图 4),充氧扳手安装精度受到影响。本文在后续叙述中介绍相关改善。

|
图 4 45°视锥角仿真结果 Fig. 4 Visible area with a 45°"view cone" below horizontal |
充氧扳手在安装过程中需要保证充氧扳手与充氧阀对中,因此在安装时可能需要反复校正,并通过扭动充氧扳手外螺纹来确定是否对中,手持充氧扳手时间较长。除此之外充氧扳手上有与地面连接的管路,会对充氧扳手产生牵引作用,长时间作业可能造成腰肌背部劳损,从而引发下背痛[15]。
利用JACK中的Lower Back Analysis(下背部分析)工具计算了L4/L5脊椎处压力,并与美国国家职业安全与健康研究所提供的NIOSH(手工提举)提供的推荐值进行比较,当对3个百分位的数字人双手施加5kg力,工人L4/L5脊椎处受力的最大值为1 100N,小于NIOSH标准给出的3 400N的限定值,工人不会面临受伤风险。
4 返回舱充氧扳手安装改进 4.1 人机工效改进1) 可视性改进,通过增加工人的作业位置高度:工人安装充氧扳手时视野受到阻碍,为了能够观察清楚,使安装部位处于最佳视野内,工人在安装时可以站立在橡胶墩上进行作业。根据3.2节的理论,建议采用的橡胶墩的高度是200 mm。同时为了保证工人头部不与总装平台发生碰撞,需要将安装区域对应的上方第2层天花板镂空,给头部留出足够的空间。作业高度的增加同时使下背部的受力减小,由1 100N减小到792N。
2) 在工具上增加视觉标识:返回舱侧壁上的充氧阀轴线与水平方向存在一个7度角,在充氧扳手安装过程时容易产生偏差。为了便于对中判断在充氧扳手轴上设计辅助判断标识,增加宽为5mm的红色标识带。当充氧扳手外套螺母旋至与充氧阀口外螺纹配合后,若红色标识带完全露出,则表明充氧扳手对中性良好。操作情况如图 5所示。

|
图 5 工人依据红色标识环带判断充氧扳手对中情况 Fig. 5 Judging installation precision by red identifying |
依靠目视检查红色标识带是否完全露出来判断螺纹对中性判断仍存在一定的主观性,不够精确。因此在充氧扳手安装过程中,设计辅助工装来使充氧扳手进行定位(图 6)。其中V型槽在竖直方向的倾斜角度为7°。当安装充氧扳手时将此结构置于充氧阀舱外阀口进行辅助定位。

|
图 6 辅助定位结构三维图 Fig. 6 3D figure of auxiliary positioning structure |
根据上述的改进措施进行充氧扳手安装,由于外套螺母和充氧扳手圆柱端面存在一定间隙,在安装完成后可选取周向4点用游标卡尺进行测量,间隙误差均在0.02 mm以内,证明螺纹对中性良好。
5 结论本文利用JACK对返回舱充氧扳手的安装过程进行建模仿真,分析了操作过程中的碰撞,可视域和下背部受力情况。根据人机工效学原理对充氧扳手的安装过程和工艺提出改进意见,保证了工人在安装过程中的视野,减轻操作者的身体疲劳。优化后,操作人员下背部受力减少28%,提升了充氧扳手安装精度。同时仿真生成的动画可用于工人培训。
| [1] |
苏润娥, 薛红军, 宋笔锋. 民机驾驶舱工效布局虚拟评价[J].
系统工程理论与实践, 2009, 29(1): 186-191.
SUN Rune, XUE Hongjun, SONG Bifeng. Ergonomic vitual assessment for cockpit layout of civil aircraft[J]. Systems Engineering-Theory & Practice, 2009, 29(1): 186-191. DOI: 10.12011/1000-6788(2009)1-186. |
| [2] |
卢晓军, 陈英武. 一个基于Jack的装甲车辆虚拟维修训练系统[J].
火力与指挥控制, 2010, 35(6): 107-109.
LU Xiaojun, CHEN Yingwu. A vitual maintenance training system of armored vehicle based on JACK[J]. Fire Control & Command Control, 2010, 35(6): 107-109. |
| [3] |
彭晓军, 李焱. 面向人素分析的虚拟维修系统的设计与实现[J].
计算机仿真, 2008, 25(9): 242-244, 320.
PENG Xiaojun, LI Yan. Design and implementation of virtual maintenance system for human factors analysis[J]. Computer Simulation, 2008, 25(9): 242-244, 320. |
| [4] |
CHAFFIN D B. Human motion simulation for vehicle and workplace design[J].
Human Factors and Ergonomics in Manufacturing & Service Industries, 2007, 17(5): 475-484.
|
| [5] |
DEMIREL H O, DUFFY V G. Applications of digital human modeling in industry[M].Berlin: Springer, 2007: 824-832.
|
| [6] |
徐平, 章勇, 徐伯初, 等. JACK虚拟技术在列车卧铺爬梯设计中的应用研究[J].
机械科学与技术, 2013, 30(12): 104-107.
XU Ping, ZHANG Yong, XU Bochun, et al. Application research of JACK virtual technology in the design of ladder of sleeper train[J]. Journal of Machine Design, 2013, 30(12): 104-107. |
| [7] |
钮建伟. JACK人因工程基础及应用实例[M].北京:电子工业出版社, 2012:73-78.
|
| [8] |
吕川, 康锐, 屠庆慈.维修性设计分析与验证[M].北京:国防工业出版社, 2012: 77-86.
|
| [9] |
吕志强, 董海.人机工程学[M].北京:机械工业出版社, 2006: 82-85.
|
| [10] |
景国勋, 李欢, 张坤. 基于多层次模糊综合评判的作业工人整体舒适度研究[J].
安全与环境学报, 2014, 14(3): 80-83.
JING Guoxun, LI Huan, ZHANG Kun. On the comprehensive evaluation of the worker comfort based on multi-stage fuzzy synthetic judgment[J]. Journal of Safety and Environment, 2014, 14(3): 80-83. |
| [11] |
曾利卫, 吕川. 基于Jack的VR环境下碰撞检测问题的研究[J].
计算机工程与应用, 2003, 39(32): 78-80.
ZENG Liwei, LV Chuan. Research on collision detection in JACK-based VE[J]. Computer Engineering and Applications, 2003, 39(32): 78-80. DOI: 10.3321/j.issn:1002-8331.2003.32.026. |
| [12] |
国家电力公司电力自动化研究院, 中国标准化与信息分类编码研究所. 控制中心人机工程设计导则. 第4部分: 受限空间尺寸[S]. 中国, 2000: 1-11.
|
| [13] |
国家电力公司电力自动化研究院, 国家电力公司劳动保护科学研究所, 中国标准化与信息分类编码研究所. 控制中心人机工程设计导则. 第2部分: 视野与视区划分[S]. 中国, 2000: 1-14.
|
| [14] |
KARMAKAR S, PAL M S, MAJUMDAR D, et al. Application of digital human modeling and simulation for vision analysis of pilots in a jet aircraft: a case study[J].
Work: A Journal of Prevention, Assessment and Rehabilitation, 2012, 16(1): 3412-3418.
|
| [15] |
雷玲, 肖国兵, 朱人, 等. 重复提举致竖脊肌疲劳作用[J].
中国职业医学, 2006, 33(1): 55-57.
LEI Ling, XIAO Guobing, ZHU Ren, et al. Fatigue of erector spinae muscles induced by repetitive lifting[J]. China Occupational Medicine, 2006, 33(1): 55-57. |