 2016, Vol. 33
2016, Vol. 33扩展功能
文章信息
- 王姝, 余强, 赵轩
- WANG Shu, YU Qiang, ZHAO Xuan
- 基于驾驶员意图识别的电动汽车电机制动失效监控系统研究
- Study on System of Monitoring Motor Brake Failure of Electric Vehicle Based on Driver Intention Recognition
- 公路交通科技, 2016, 33(12): 145-153
- Journal of Highway and Transportation Research and Denelopment, 2016, 33(12): 145-153
- 10.3969/j.issn.1002-0268.2016.12.023
-
文章历史
- 收稿日期: 2016-05-03


由于电动汽车的特殊性,使得电动汽车在制动工况下存在两种制动:机械制动和电机制动。电机制动即电机利用汽车的惯性动能发电产生制动转矩,使车辆减速,同时产生的电流回馈到蓄电池。当电动汽车制动时,如果电机不能做出正确的响应,在采取制动措施一定时间后仍有超过允许的电流从电机控制器输出;同时还存在机械制动,因而存在电机扭矩输出,而制动器需要车轮停止旋转,这会造成电机的堵转,长时间会造成电机损坏。当驾驶员停止制动时,由于电机仍有扭矩输出,会使车辆突然蹿出失去控制。因此在电动汽车制动尤其是紧急制动过程中,电机制动失效将对车辆、驾驶员及群众造成严重的安全威胁。
目前,由于制动能量回收在电动汽车上的广泛应用,迫切需要对电机制动状况进行监测。文献[1-3]均提出了一种制动能量回收控制策略,文献[1]基于分层控制提出了一种电动汽车倒拖制动控制策略,它们均未考虑到电机制动失效时对安全的影响。文献[2]从硬件和控制策略两方面进行了制动能量回收的研究,建立了制动各阶段主缸、踏板行程及轮缸压力的关系,并利用此关系进行压力估算,通过对制动管路压力检测并以此监测电机制动状态。
基于前人经验,本文针对电动汽车提出一种基于驾驶员意图识别的电机制动失效监测系统,对电动汽车制动时的电机状态进行监控,以确保制动时车辆的安全性、操控性。
1 方案设计导致电机制动失效的原因较多,常见的主要有:(1)驾驶员操作不当;(2)加速踏板故障,例如加速踏板释放后不能迅速回位或加速踏板传感器故障,使得在制动踏板空行程时仍有加速踏板信号;(3)电机控制器故障引起IGBT不能迅速关断或无法关断等。这些故障会造成车辆制动时仍有正向电流流出,由于导致失效原因的多样化,因此需要设计出广泛适用的电机制动失效监测系统。
在电机制动中,将车辆处于制动状态但有正向电流流入控制器的状态称为冲突状态,电机制动失效检测系统是根据当前驾驶员制动意图与电机状态和冲突状态持续时间,来判断电机制动是否需处于失效,并判断故障等级。根据不同的故障等级,通过改变电机控制器的油门踏板信号、制动信号及对安全回路进行控制,确保行驶安全。
因此,电机制动失效监测系统主要包括3部分:数据采集模块、故障检测模块、故障处理模块。数据采集模块用以采集当前车辆运行状态、驾驶员操作状态及电机运行状态的相关数据,包括轮速采集系统、母线电压采集系统、电流采集系统、制动踏板位移及制动管路压力的采集数据,并输入故障检测模块中。故障检测模块对数据采集模块输入的信号进行处理,识别当前驾驶员的制动意图,并根据电机运行状态和冲突时间判断当前失效状态等级,向故障处理模块发出动作指令。故障处理模块根据指令作出合理响应,切断驱动系统,使车辆迅速停止运行,同时给予驾驶员及后车直观警示。
为了避免电机制动失效造成的危险,基于驾驶员意图识别的电机制动失效监测系统应实现如下功能:
(1) 在制动过程中,能够正确识别驾驶员的制动意图。
(2) 正确判断失效状态等级。
(3) 能够根据不同的故障等级及时作出合理响应,警示驾驶员及周围行驶车辆,并使车辆迅速减速。
(4) 拥有备用纯硬件系统,避免在紧急制动下由于ECU故障引起安全问题。
(5) 处理和存储各信号、报文。
(6) 由于车辆上配备有开关电源,会产生强烈的电磁干扰,因此需要采取措施进行电磁屏蔽,以使设备能正常稳定。
电机制动失效检测系统的总体结构如图 1所示。

|
| 图 1 电机制动失效监测系统结构图 Fig. 1 Structure of monitor system for motor brake failure |
| |
2 电机制动失效监测系统硬件设计
电机制动失效监测系统硬件电路除了保证系统的正常运行,还应能处理在紧急制动时系统ECU故障导致的紧急危险情况。硬件电路包括电源电路、信号采集调理电路、故障监测电路、故障处理电路。电路原理图如图 2所示。

|
| 图 2 电路原理图 Fig. 2 Circuit diagram |
| |
2.1 电源电路
由于磷酸铁锂电池组额定电压为12.8V,最高电压为14.4 V,而控制器内单片机及各芯片均需要5 V 电源,电流传感器需要稳定的12 V电源,电压传感器需要15 V电源,因此需要通过电源电路稳定产生以上所需电压,保证整个系统可靠运行。方案中使用3个稳压芯片(LM2940,LM7812,LM7815)分别将电源电压稳定至5,12,15 V。
2.2 信号调理电路由于制动管路压力采用电压输出型液压送变器进行测量,输出范围为0~10 V,而单片机IO口的采集范围为0~5 V,因此需要对电压信号进行处理。为了提高转换精度,本方案中并未采用常见的电阻分压,而是采用运算放大器进行信号处理。由于同向比例放大器放大比例不能小于1,因此采用LM358设计两级反向比例放大器,放大比例分别为-0.5,-1。
2.3 故障监测电路故障监测电路主要实现电机工作状态估计和冲突时间计算。利用电压比较器LM393判断母线上的电流是否超过阈值,基准端使用滑动变阻器用以根据不同车型调节故障阈值。电压比较器的输出端与模式识别信号共同输入到与门芯片74LS11中,以判断车辆是否处于冲突状态。冲突时间检测利用74LS161计数器与NE555定时器,在处于冲突状态后,计数器对定时器溢出进行累加,直到设定的时间阈值。如果在时间阈值内冲突消失,将自动对计数器清零。为了保证驾驶安全,采用D触发器74LS74将出现三级故障后的车辆锁定,直至驾驶员重启车辆。
2.4 故障处理电路故障处理电路主要对控制系统输出的不同故障等级信号产生响应。故障处理模块接收到D触发器的输出信号后,利用光电耦合器进行光电隔离,经三极管放大后驱动直流接触器,切断直流输出,并启动驾驶舱内故障指示灯。为了保证切断直流输入后电机控制器的电压迅速下降到人体安全电压以下,需要设计放电回路。经测量选用的电机控制器等效电容值为660 μF,为了使电压在2 s内降至36 V,采用RC放电回路公式,即:
|
(1) |
式中,uc为放电终止电压;u0为放电起始电压;R为放电电阻值;C为电机控制器等效电容;t为放电时间。
根据式(1)可得到放电电阻,选择200 W 200 Ω。
3 电机制动失效监测系统软件设计电机制动失效监测系统的正常工作除了需要可靠的硬件系统,还需要有相对应的程序对其进行控制。本节将介绍监测系统各子模块软件的设计,使得各硬件在程序控制下能稳定可靠工作。
为了降低程序复杂度,使程序设计、调试和维护等操作简单化,软件部分采用模块化程序设计,将整个系统分为驾驶员意图识别模块、故障等级判断模块、故障处理模块,整个系统在3个模块相互转化过程中运行。主程序流程图如图 3所示。系统上电后首先进行各模块的初始化,之后进行系统自检,自检通过后进行数据采集,将采集到的数据分别进行HMM驾驶员制动意图识别、冲突时间识别、电机状态识别,将识别结果送入模糊推理模型进行故障等级判断,然后根据不同的故障等级进行故障处理,并完成实时通信等工作。

|
| 图 3 主程序流程图 Fig. 3 Flowchart of main program |
| |
3.1 驾驶员意图识别模块
驾驶员对车辆的操作是对当前驾驶环境感知的外在反应,是驾驶意图的具体体现[4]。车辆制动操作属于时间较长的复杂事件,因此驾驶员驾驶意图不能单一通过判断当前制动状态,而应通过判断一段时间内的制动状态产生,因此将制动过程分割成持续时间较短的单一事件,包括:(1)快速踩下制动踏板;(2)缓慢踩下制动踏板;(3)快速松开制动踏板;(4)缓慢松开制动踏板;(5)制动踏板保持。这些操纵行为按照时间上的组合反映了当前驾驶员根据驾驶环境所产生的驾驶意图。但是驾驶员的驾驶意图并不能直接获得,只能通过观测驾驶员的驾驶行为组合,进而辨识驾驶员的驾驶意图。而隐形马尔可夫模型(Hidden Markov Model,HMM)恰能解决模型状态不能直接观察到而仅能得到观测序列的问题[4]。
本文根据层次化结构模型搭建了双层HMM,模型包括底层制动动作识别和高层制动意图识别两层结构。底层马尔可夫模型主要以制动踏板位移、速度、力作为观测序列进行制动动作识别;高层状态识别模块是一个由3部分序列组成的多维离散化序列,分别对应着制动动作状态序列、车速变化序列、制动减速度序列。高层模型通过对离散参数序列进行不同的HMM隶属度识别,最终得到车辆制动运行模式[5-6],双层HMM结构如图 4所示。

|
| 图 4 双层HMM结构 Fig. 4 Structure of bi-layer HMM |
| |
3.1.1 数据的离散化处理
双层HMM驾驶意图识别模型结构确定后,首先对驾驶员操作行为(制动踏板、制动减速度、车速)进行底层识别。由于这些观测值都是随时间变化的连续变量,而HMM识别需要的是离散的自然符号,因此需要对这些连续量进行离散符号化。数据离散化常用的是k-means算法,然而k-means算法对初值敏感,不同初值下常导致不同的聚类结果,没有良好的稳定性,对异常数据亦敏感[7]。因此本文中采用k-medoids算法实现观测值的离散化,以制动踏板速度为例,其离散化结果如图 5所示。

|
| 图 5 制动踏板速度离散化结果 Fig. 5 Discretization result of break speed |
| |
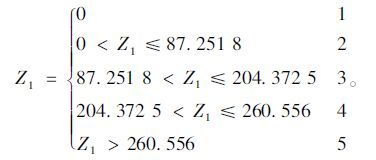
(1) 制动踏板位移变化率(Z1)的离散化
|
(2) |
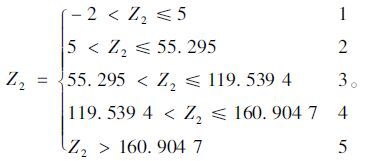
(2) 制动踏板位移(Z2)的离散化
|
(3) |
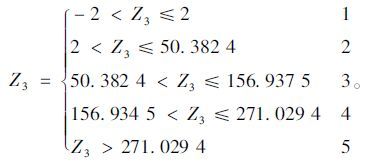
(3) 制动踏板力(Z3)的离散化
|
(4) |
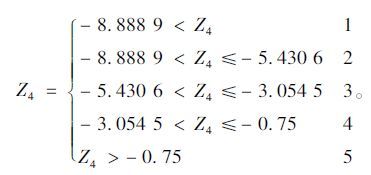
(4) 制动减速度(Z4)的离散化
|
(5) |
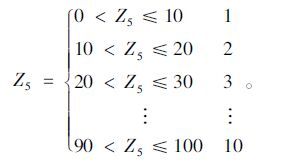
(5) 车速的离散化
|
(6) |
底层HMM包括3部分,即制动踏板行为识别、制动减速度识别、车速识别。制动踏板行为识别由制动踏板位移变化率、制动踏板位移及制动踏板力的离散化序列Z1,Z2,Z3作为观测量,制动减速度识别由制动减速度的离散变化序列Z4作为观测量,车速识别由车速的离散化序列Z5作为观测量。分别将它们送入对应的HMM中,分别应用Baum-Welch算法训练5个制动踏板模型,即:快速踩下制动踏板模型、缓慢踩下制动踏板模型、快速松开制动踏板模型、缓慢松开制动踏板模型、制动踏板保持模型,并得到模型参数[6]。
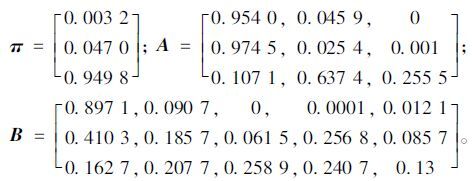
3.1.2 HMM高层驾驶员制动模式识别HMM高层驾驶员制动模式识别是一种根据制动动作、制动减速度、车速状态进行综合识别的系统。本层模型包括3个子模型λ1,λ2,λ3,分别对应驾驶员制动操作的3个模型{缓慢制动模型,正常制动模型,紧急制动模型}。将底层HMM的识别结果序列O=O1O2O3作为观测值输入高层HMM中,然后应用 Baum-Welch 算法进行模型训练,确定各模型的参数λ=(π,A,B),其中π为初始化概率向量;A为状态转移矩阵;B为观察值概率矩阵。应用前向-后向算法计算3个HMM的匹配程度,选取似然度最大的模型作为当前驾驶员制动模式的识别结果[4]。
在MATLAB中,将制动踏板操作识别序列、制动减速度识别序列、车速状态识别序列作为高层模型的三维观察值序列,对模型的3个参数π,A,B进行多次离线优化,应使每次训练后新模型能够比原有模型更好地表示观测序列,直至lgP(O/λ)-lgP(O/λ0)>a,a为给定的一个足够小的值。以紧急制动工况为例,经多次优化后初始化概率向量和状态转移矩阵。观察值概率矩阵分别如下。
|
在失效状态等级判别过程中,失效等级难以用精确的数学模型来描述,而模糊推理系统(Fuzzy Inference System,FIS)通过模拟人类的思维模式,实现近似模糊推理的过程,可同时处理定性描述和定量描述的问题。本文建立的是基于Mamdani-style推理的FIS系统,采用质心法进行逆模糊化[8-9]。
制动意图是驾驶员希望达到期望减速特性的迫切程度,电机控制器输入电流及冲突时间是制动过程中用来判断车辆安全状态的重要信号。因此,制动意图、电机控制器电流及冲突时间是失效状态等级判断的主要参数。以这3个参数为输入,以量化的失效状态等级为输出,结合熟练驾驶员的驾驶经验,建立如图 6所示的电机制动失效等级模糊推理模型。

|
| 图 6 失效等级模糊推理模型结构图 Fig. 6 Structure of fuzzy reasoning model of failure level |
| |
该模型属于多输入单输出(MISO)的模糊推理模型,隶属函数采用梯形形式。
设论域UB是驾驶员制动意图B的量化范围,取为[-6 0],其上有3个模糊集合,分别代表紧急制动(NB),正常制动(NM),缓慢制动(NS)。
设论域UI是电机控制器电流I的量化范围,取为[0 180],其上有4个模糊集合,分别代表电流的零(Z)、正小(PS)、正中(PM)、正大(PB)。
设论域UT是冲突时间T的量化范围,取为[0 3],其上有4个模糊集合,分别代表时间的零(Z),正小(PS)、正中(PM)、正大(PB)。
设论域UA是失效状态等级A的量化范围,取为[0 3],其上有4个模糊集合,分别代表时间的零(Z)、正小(PS)、正中(PM)、正大(PB)。
确定输入输出论域及隶属函数后,制订模糊推理规则库。3个输入论域分别有3,4,4个模糊集合,故总的模糊推理规则数目为48条。模糊推理规则表如表 1所示。
| 制动意图 | I | T | |||
| Z | PS | PM | PB | ||
| NB | Z | Z | Z | Z | Z |
| PS | PS | PS | PM | PM | |
| PM | PM | PM | PB | PB | |
| PB | PM | PB | PB | PB | |
| NM | Z | Z | Z | Z | Z |
| PS | PS | PS | PM | PM | |
| PM | PS | PM | PM | PB | |
| PB | PM | PM | PB | PB | |
| NS | Z | Z | PZ | PZ | PZ |
| PS | PS | PS | PS | PM | |
| PM | PS | PS | PM | PM | |
| PB | PM | PM | PM | PB | |
3.3 故障处理模块
故障处理模块处理流程如图 7所示,该模块根据故障等级识别模块的识别结果产生不同响应,三级故障属于极危险状况,应使车辆及时减速停车,因此采取直接断开驱动电路主接触器的方式,断开电池与电机控制器间的电气连接;二级故障属于一般危险状况,因此需要失效监测控制器向电机控制器输出与零扭矩相对应的油门踏板信号,并输出制动信号;一级故障属于轻微危险状况,因此只需要电机制动失效检测系统控制器向电机控制器输出与零扭矩相对应的油门踏板信号。同时故障等级只能单向递增,即故障等级只能由一级向三级故障改变。

|
| 图 7 故障处理流程图 Fig. 7 Flowchart of fault handling |
| |
4 仿真与试验验证 4.1 模型建立
利用Simulink/Simplorer建立联合仿真模型:在Simulink中建立HMM仿真模型及模糊推理模型(图 8);在Simplorer中建立电气系统仿真模型(图 9)。为了实现联合仿真,还需要在Simulink和Simplorer中分别建立信号交互子模块。利用Simulink模型进行模式识别,将模式识别结果与Simplorer检测到的母线电流值和冲突时间输入模糊推理模型中,将模糊推理结果输入Simplorer模型中,以产生不同的响应[10-12]。

|
| 图 8 Simulink仿真模型 Fig. 8 Simulink simulation model |
| |

|
| 图 9 Simplorer仿真模型 Fig. 9 Simplorer simulation model |
| |
4.2 仿真与试验验证
由于电机制动失效属于一种危险状况,并且不能保证在试验中电机一定能够出现制动失效的工况,为此采用替代试验的方法,即试验过程中由整车控制器向电流传感器采集电路发出信号,并将信号保持一段时间,以模拟冲突过程。
分别进行初速度为50 km/h的紧急制动试验、缓慢制动试验,初速度为70 km/h的正常制动试验,采集制动踏板力、制动踏板位移、制动踏板位移变化率、车速数据。具体试验方案如表 2所示。
| 车速/(km·h-1) | 制动方式 | 冲突时间/s | 功率/kW |
| 50 | 紧急制动 | 2 | 10 |
| 50 | 缓慢制动 | 0.3 | 3 |
| 70 | 正常制动 | 0.15 | 1 |
采集初速度为50 km/h的紧急制动试验数据、初速度为50 km/h的缓慢制动试验数据、初速度为70 km/h的正常制动试验数据,分别作出如图 10(a)~(c)所示的车速、制动踏板位移、制动踏板位移变化率及制动踏板力随时间变化的曲线。

|
| 图 10 制动试验曲线 Fig. 10 Break experiment curves |
| |
图 11为3组试验的系统响应曲线。三级故障、二级故障、一级故障分别用数值30,20,10表示;模式识别结果:紧急制动、一般制动、轻微制动分别用数值30,20,10表示。在车速为50 km/h时开始制动,模式识别结果为紧急制动,制动1 s后,控制器检测到母线输出功率为10 kW,并且保持1 s,因此模糊推理器判定其为重度危险状态。在车速约为50 km/h时开始制动,模式识别结果为缓慢制动,制动2.3s后,控制器检测到母线输出功率为3 kW,并且保持0.3 s,因此模糊推理器判定其为一般危险状态。在车速为70 km/h时开始制动,模式识别结果为正常制动,制动2.2 s后,控制器检测到母线输出功率为0.5 kW,并且保持0.2 s,因此模糊推理器判定其为轻微危险状态。

|
| 图 11 系统响应曲线 Fig. 11 System response curve |
| |
以初速度为50 km/h紧急制动为例,图 12为得到的3种制动状态下的状态累计概率对数值曲线,整个制动过程中紧急制动HMM隶属度平均值为-24.8925,最大值为-24.266 4,最小值为-25.076 9;正常制动HMM隶属度平均值为-39.901 9,最大值为-32.625 2,最小值为-74.271 8;缓慢制动HMM隶属度平均值为-56.841 6,最大值为-74.271 8,最小值为-103.504 1;整个模式识别过程中,紧急制动模型的隶属度明显大于正常制动和缓慢制动模型的隶属度,并且紧急制动模型的隶属度波动小而平稳,而正常制动和缓慢制动模型的隶属度波动极大,因此可以认为双层HMM正确识别了驾驶员的制动意图。

|
| 图 12 状态累计概率对数值曲线 Fig. 12 Curves of state cumulative probability in log |
| |
试验中放电过程的电压-时间曲线如图 13所示。在前0.5s,模式识别系统将驾驶员制动动作识别为紧急制动,并且在直流母线上存在10 kW的功率输入,并保持了1 s,因此模糊推理系统将失效等级判断为中度危险,并产生响应。断开电机控制器直流输入,并打开放电回路,因此0.5 s后,电机控制器电压迅速降低到人体安全电压下。

|
| 图 13 放电过程电压-时间曲线 Fig. 13 Curve of voltage-time in discharge process |
| |
5 结论
(1) 为了更加有效地对纯电动汽车电机制动失效过程进行监测,设计了基于驾驶员意图识别的电机制动失效监测系统,对系统的软硬件进行了设计。
(2) 将驾驶员制动过程看作时间段上制动踏板一系列动作的组合,并以此为依据利用双层隐形马尔科夫理论将制动模式分为紧急制动、正常制动、缓慢制动,并建立了相应模型。仿真结果表明,基于双层HMM的驾驶员意图识别模型能够正确识别驾驶员的制动意图。
(3) 利用模糊推理,根据模式识别结果,可用电机输入功率、冲突时间对失效等级进行正确判断。
(4) 利用Simulink/Simplorer联合仿真,充分利用Simplorer在电气仿真上的优势,并进行了试验验证。结果表明,该控制系统能够有效识别驾驶员制动意图,对失效等级判断正确,对故障处理正确,能确保电机制动失效时车辆及驾驶员的安全。
| [1] | 金纯, 郑舒阳, 田海永. 电传动车辆反拖系统设计与分层控制策略研究[J]. 农业机械学报 , 2014, 45 (4) : 22-27 JIN Chun, ZHENG Shu-yang, TIAN Hai-yong. Anti-drive System Design and Hierarchy Control Strategy of Electric Drive Vehicle[J]. Transactions of the Chinese Society of Agricultural Machinery , 2014, 45 (4) : 22-27 |
| [2] | 文婧. 电动轿车制动能量回收系统压力监测与失效分析[D]. 长春:吉林大学, 2014. WEN Jing. Pressure Monitor and Failure Analysis of Regenerative Braking System on Electric Vehicle[D]. Changchun:Jilin University, 2014. http://cdmd.cnki.com.cn/Article/CDMD-10183-1014297659.htm |
| [3] | 胡东海, 何仁, 俞剑波, 等. 基于电液复合制动系统的电动汽车再生制动控制策略研究[J]. 公路交通科技 , 2014, 31 (3) : 148-152 HU Dong-hai, HE Ren, YU Jian-bo, et al. Research of Regenerative Braking Control Strategy of Electric Vehicle Based on Electro-hydraulic Hybrid Brake System[J]. Journal of Highway and Transportation Research and Development , 2014, 31 (3) : 148-152 |
| [4] | 李晶皎, 王爱侠, 王骄, 等. 模式识别[M]. 北京: 电子工业出版社, 2013 : 365 -380. LI Jing-jiao, WANG Ai-xia, WANG Jiao, et al. Pattern Recognition[M]. Beijing: Publishing House of Electronics Industry, 2013 : 365 -380. |
| [5] | MENG Xiao-ning, LEE K K, XU Yang-sheng. Human Driving Behavior Recognition Based on Hidden Markov Models[C]//IEEE International Conference on Robotics and Biomimetics. Kunming:IEEE, 2006:274-279. |
| [6] | 赵轩. 纯电动客车动力总成控制策略研究[D]. 西安:长安大学, 2012. ZHAO Xuan. Study on Control Strategy for Powertrain of Pure Electric Bus[D]. Xi'an:Chang'an University, 2012. http://www.oalib.com/references/17470328 |
| [7] | 夏宁霞, 苏一丹, 覃希. 一种高效的K-medoids聚类算法[J]. 计算机应用研究 , 2010, 27 (12) : 4517-4519 XIA Ning-xia, SU Yi-dan, QIN Xi. Efficient K-medoids Clustering Algorithm[J]. Application Research of Computers , 2010, 27 (12) : 4517-4519 |
| [8] | 柴园园.普适的模糊推理系统理论及应用[D]. 北京:北京交通大学, 2010. CHAI Yuan-yuan. Universal Fuzzy Inference Systems:Theory and Application[D]. Beijing:Beijing Jiaotong University, 2010. |
| [9] | 王玉海, 宋健, 李兴坤. 基于模糊推理的驾驶员意图识别研究[J]. 公路交通科技 , 2005, 22 (12) : 113-118 WANG Yu-hai, SONG Jian, LI Xing-kun. Study on Inference of Driver's Intentions Based on Fuzzy Reasoning[J]. Journal of Highway and Transportation Research and Development , 2005, 22 (12) : 113-118 |
| [10] | 康洪铭, 李光升, 魏宁, 等. 装甲车辆电源系统Simulink与Simplorer联合仿真[J]. 电源技术 , 2013, 37 (10) : 1862-1864 KANG Hong-ming, LI Guang-sheng, WEI Ning, et al. Co-simulation with Simulink and Simplorer of Armored Vehicle Power System[J]. Chinese Journal of Power Sources , 2013, 37 (10) : 1862-1864 |
| [11] | 李傲梅, 傅鹏. 基于SIMPLORER的电源电路仿真[J]. 系统仿真学报 , 2007, 19 (4) : 745-748 LI Ao-mei, FU Peng. Power Circuit Emulation Based on SIMPLORER[J]. Journal of System Simulation , 2007, 19 (4) : 745-748 |
| [12] | 赵鲁. 基于Simplorer场路耦合多物理域联合仿真[M]. 北京: 中国水利水电出版社, 2013 . ZHAO Lu. Field-circuit Coupled Physics Co-simulation Based on Simplorer[M]. Beijing: China Water & Power Press, 2013 . |