 2015, Vol. 31
2015, Vol. 31扩展功能
文章信息
- 胡晓明, 赵志国
- HU Xiao-ming, ZHAO Zhi-guo
- 基于相平面分区的半挂液罐车稳定性控制
- Stability Control of Liquid Tank Semi-trailer Based on Phase Plane Division
- 公路交通科技, 2015, Vol. 31 (12): 151-158
- Journal of Highway and Transportation Research and Denelopment, 2015, Vol. 31 (12): 151-158
- 10.3969/j.issn.1002-0268.2015.12.025
-
文章历史
- 收稿日期: 2014-11-12


半挂汽车在货物运输过程中具有成本低、效率高和运输量大等特点,在各个国家得到了广泛的应用,但由于牵引车和半挂车通过鞍座的耦合作用,其稳定性相对与传统的两轴汽车较差,常常发生交通事故。借鉴乘用车的稳定性控制技术,目前国内外汽车研究机构对半挂车的稳定性控制进行了大量的研究[1, 2, 3, 4]。
半挂液罐车作为运输液体的主要工具与一般半挂车辆相比,由于罐内液体晃动的影响,车辆易发生折叠、摆振等横向失稳和侧翻等事故,使得整车的稳定性问题较一般半挂车辆更为复杂。半挂液罐车罐体内的液体晃动同在航天器燃料、液体储存等领域的液体晃动问题相比,属于非轴对称问题,具有复杂的自由液面运动学及动力学边界条件,目前研究的较少[5, 6]。Djavareshkian等人[7]采用了VOF方法对不同的充液率和罐体半径的圆柱形容器内液体晃动进行了计算;刘奎等[8]采用VOF模型对罐车转向时液体晃动进行了数值模拟,对单室受力及侧倾力矩进行了计算;刘小民等[9]基于欧拉-欧拉多相流模型对罐车在公路制动和转弯过程中罐体内液体的晃动过程进行了数值模拟。
本文在考虑液体晃动情况下,建立半挂液罐车非线性动力学模型,针对半挂液罐车的稳定性较差的问题,提出了基于相平面分区控制的方法,抑制液体晃动对半挂液罐车的影响,提高半挂液罐车的行驶稳定性。
1 半挂液罐车模型的建立 1.1 模型建立工程中常将液体晃动问题采用等效方法建立简单的力学模型[10]。本文将液罐车的液体晃动等效成弹簧-质量-阻尼系统,再结合半挂车的刚体模型,建立半挂液罐车动力学模型。液体晃动的等效求解过程可参考文献[11],这里不再赘述。建立的车辆坐标系如图 1所示,牵引车和挂车的原点分别为质心横截面与其侧倾轴线的交点。x轴指向车辆前方,y轴指向驾驶员左侧,z轴指向车辆上方。根据图 1的定义,写出各运动的微分方程。

|
| 图 1 半挂液罐车结构示意图 Fig. 1 Schematic diagram of liquid tank semi-trailer |
假设车辆的行驶速度为ux,在正常行驶情况下,牵引车和挂车的铰接角θ较小,则半挂液罐车的约束方程可表示为:
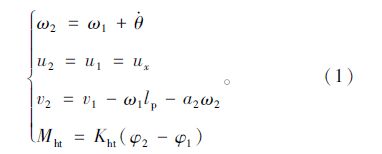
根据图 1的定义,可以写出牵引车、挂车和转向系统的运动微分方程。考虑到轮胎的非线性,选择模型简单、参数较少和参数辨识容易的Burckhardt模型来描述轮胎的非线性特性[12]。以方向盘转角δsw为输入变量,选择变量:


式中,M,C,N为系数矩阵;w为液体晃动等效模型中各阶质量相对罐体运动产生的附加项。其中
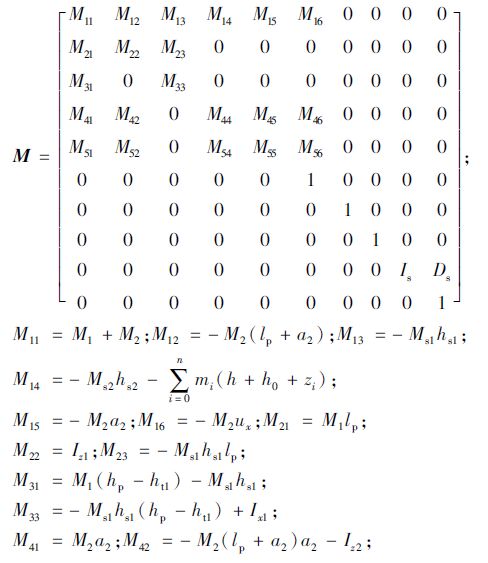
则系统的状态空间方程可描述为:

式中,A为系统矩阵,A∈R10×10且A=M-1C;B为输入矩阵,B∈R10×1且B=M-1N;u为系统输入,u=δsw。
制动系统中每个车轮产生的制动力矩表示为:

模型系统中各参数的含义与数值见表 1。
| 参数 | 含义 | 数值 | |||
| M1 | 牵引车整车质量/kg | 9 100 | |||
| Ms1 | 牵引车簧载质量/kg | 6 260 | |||
| Iz1 | 牵引车横摆转动惯量/(kg·m2) | 32 100 | |||
| Ix1 | 牵引车簧载质量侧倾转动惯量/(kg·m2) | 8 770 | |||
| u1 | 牵引车行驶速度/(m·s-1) | ||||
| φ1 | 牵引车簧载质量侧倾角/rad | ||||
| ω1 | 牵引车横摆角速度/(rad·s-1) | ||||
| θ | 铰接角/rad | ||||
| hs1 | 牵引车簧载质量质心到侧倾轴线距离/m | 0.4 | |||
| a1 | 牵引车质心到前轴距离/m | 1.8 | |||
| b1 | 牵引车质心到2轴距离/m | 1.4 | |||
| b2 | 牵引车质心到3轴距离/m | 2.7 | |||
| ht1 | 牵引车簧载质量侧倾中心高度/m | 0.85 | |||
| lp | 牵引车质心到第5轮距离/m | 1.8 | |||
| hp | 第5轮到地面距离/m | 1.3 | |||
| k1 | 牵引车前轴轮胎侧向刚度/(N·rad-1) | 390 000 | |||
| k3 | 挂车轮胎侧向刚度/(N·rad-1) | 430 000 | |||
| Is | 转向系统绕转向销转动惯量/(kg·m2) | 0.8 | |||
| Cs | 转向系统综合刚度/(N·m·rad-1) | 20 000 | |||
| h0 | 罐体底部距侧倾轴线距离/m | 0.4 | |||
| mi | 第i阶晃动质量/kg | ||||
| ci | 第i阶晃动阻尼系数/(N·m-1·s) | ||||
| zi | 第i阶晃动质量至坐标原点距离/m | ||||
| Pt | 制动气室压力/MPa | 0.7 | |||
| BF | 制动鼓制动因数 | 1.19 | |||
| la | 间歇调整机构有效长度/mm | 250 | |||
| M2 | 含液体在内挂车整车质量/kg | ||||
| Ms2 | 空载时挂车簧载质量/kg | 7 640 | |||
| Iz2 | 含液体在内挂车横摆转动惯量/(kg·m2) | ||||
| Ix2 | 含液体在内挂车侧倾转动惯量/(kg·m2) | ||||
| u2 | 挂车行驶速度/(m·s-1) | ||||
| φ2 | 挂车簧载质量侧倾角/rad | ||||
| ω2 | 挂车横摆角速度/(rad·s-1) | ||||
| Kht | 牵引车与挂车间侧倾耦合刚度/(N·m·rad-1) | 6 900 000 | |||
| hs2 | 空载时挂车簧载质量质心到侧倾轴线的距离/m | 1 | |||
| b3 | 挂车质心到第4轴距离/m | 0.4 | |||
| b4 | 挂车质心到第5轴距离/m | 1.7 | |||
| b5 | 挂车质心到第6轴距离/m | 3.1 | |||
| ht2 | 挂车簧载质量侧倾中心高度/m | 0.95 | |||
| a2 | 第5轮到挂车质心距离/m | 6.4 | |||
| Mht | 侧倾耦合力矩/(N·m) | ||||
| k2 | 牵引车后轴轮胎侧向刚度/(N·rad-1) | 360 000 | |||
| δ | 牵引车前轮转向角/rad | ||||
| Ds | 转向轮绕主销阻尼/(N·m·s·rad-1) | 600 | |||
| i | 转向系统传动比 | 25 | |||
| h | 液体深度/m | ||||
| m0 | 液体等效固定质量块质量/kg | ||||
| ki | 第i阶晃动弹簧刚度N/m | ||||
| yλi | 第i阶晃动质量块偏离平衡位置位移/m | ||||
| ηm | 制动效率 | 0.725 | |||
| lb | 凸轮有效半径/mm | 45 | |||
| Rr | 制动鼓半径/mm | 210 | |||
| A0 | 制动气室有效面积/mm2 | 23 900 | |||
| 注:参数M2,Ix2,Iz2与充液深度有关。 | |||||
为验证所建立的半挂液罐车仿真模型的准确性,以HYG9404GHY三轴式半挂液罐车为研究对象,进行了阶跃转向和双移线两种工况试验,将测试的车辆运行参数与模型仿真结果进行对比验证。定义充液比k为液体深度h与罐体半径R的比值,即k=h/R。液体晃动等效模型取2阶,限于篇幅,这里仅例举充液比k=1.2、车速u=40 km/h阶跃转向和k=1.0、车速u=50 km/h双移线两种工况实车试验与仿真车辆主要参数比较如图 2所示。

|
| 图 2 试验和仿真车辆运行参数比较 Fig. 2 Comparison of operating parameters between test vehicle and simulation vehicle |
由图 2可见,实车试验结果与仿真得到的参数曲线在变化趋势和变化范围方面都具有很好的一致性。因此可认为建立的半挂液罐车仿真模型是正确、可靠的,可以作为下一步研究的基础。
2 相平面分区稳定性控制 2.1 相平面分区控制原理系统运行特性,最直接表征形式为控制量反馈值与理想值的误差e和误差变化率$\dot e$。相平面分区控制是以误差e和误差变化率$\dot e$的相平面为工具,将相平面分成不同的几个区域,每个区域对应系统一种运行工况,在不同区域采用不同的控制作用Ki(i=0,±1,±2,±3,±4),使之建立起一一对应关系[13]。通过对误差e和误差变化率$\dot e$的判断,来确定此刻控制力Ki的选择。控制示意如图 3所示。

|
| 图 3 相平面分区控制示意图 Fig. 3 Schematic diagram of phase plane divisional control |
相平面中控制Ki的作用及关系如下: K0(保持):稳态平衡时的控制。
K1+(弱加):对最大负超调量有影响,系统在稳定区域时对误差变化率进行微调。
K1-(弱减):对最大正超调量有影响,系统在稳定区域时对误差变化率进行微调。
K2-(微减):改变正超调后下降趋势的控制。
K3-(轻减)和K4-(强减):抑制正超调。
K4+(强加),K3+(轻加),K2+(微加):上升和抑制负超调。
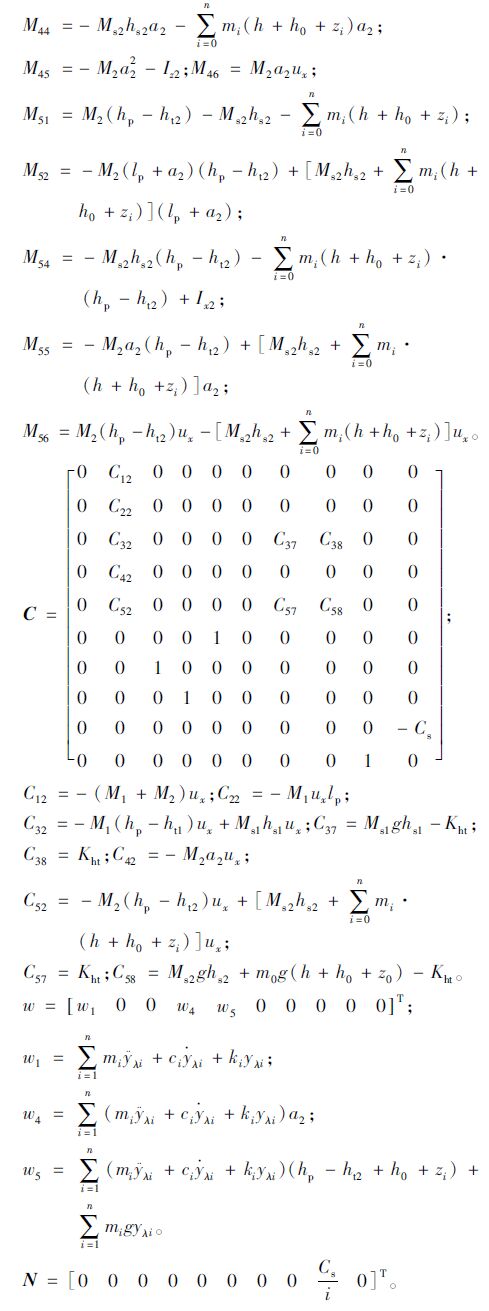
2.2 控制变量参考响应在车辆稳定性研究中,车辆横摆角速度和质心侧偏角是描述车辆运动状态的重要参数。横摆角速度一般可以直接测量,而质心侧偏角只能通过估计算法间接获得。半挂车辆的稳定性是由牵引车决定的,当牵引车为不足转向时,整车都是稳定的;当牵引车为过度转向时,不论挂车为何种特性,整车都将表现摆振或折叠失稳。此外铰接角也可以有效表征车辆的折叠和摆振事故[14]。所以半挂液罐车稳定性控制系统选择牵引车的横摆角速度和铰接角作为控制变量。 参考模型采用线性4自由度单轨半挂汽车模型,模型包括牵引车、挂车的侧向和横摆4个自由度。设该模型中罐体内的液体不具有流动性,其他物理性质都与半挂液罐车动力学模型相同。采用线性轮胎模型,系统的状态空间方程可描述为:

式中,A*∈R4×4为系统矩阵,且A*=M-1*C1;B*∈R4×1为输入矩阵,且B*=M-1*N*。其中
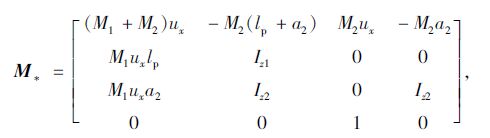
式中各参数定义见表 1。
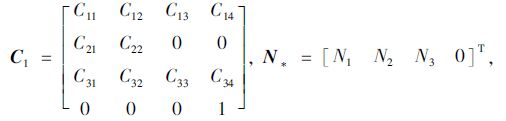
式中,Cij(i,j=1,2,3)和Ni(i=1,2,3)分别为:
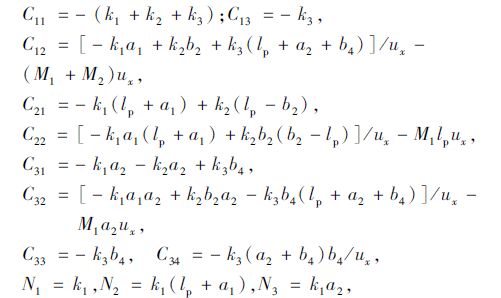
式中各参数定义见表 1。
考虑路面附着条件下侧向力满足的约束,求得理想横摆角速度为:

式中Gω为横摆角速度增益。 理想铰接角的参考值为:

式中Gθ为铰接角增益。
式(5)、式(6)中的增益系数分别为:

根据相平面分区控制原理,将牵引车理想横摆角速度ω*1与牵引车实际横摆角速度ω1的偏差e和偏差变化率$\dot e$的相平面分成区域,每个区域通过不同的差动制动实现附加横摆力矩来控制车辆的稳定性。为避免过于频繁制动,在偏差e处于阈值范围区域内不实施稳定性控制。总体的横摆角速度相平面分区控制输出形式,如表 2所示。
| e | $\dot e$ | ||
| $\dot e$ <-$\dot e$0 | |$\dot e$|≤$\dot e$0 | $\dot e$>$\dot e$0 | |
| e<-e0 | 强过度转向 Fx2+Fx4+Fx6 | 轻过度转向 Fx4+Fx6 | 微过度转向 Fx2 |
| |e|≤e0 | 0 | 0 | 0 |
| e>e0 | 微转向不足 Fx1 | 轻转向不足 Fx3+Fx5 | 强转向不足 Fx1+Fx3+Fx5 |
| 注:e0,$\dot e$0为设定的阈值。 | |||
同时监测铰接角θ与理想铰接角θ的差值,当差值满足式(8)且车辆处于强过度转向工况时,此时车辆呈现折叠倾向,则通过制动挂车车轮拉长车体,来避免车辆折叠失稳的发生。总体控制结构原理如图 4所示。


|
| 图 4 控制结构原理图 Fig. 4 Control structure principle |
鉴于实车试验的危险性,选用仿真试验的方法进行研究。车辆罐体半径R=1.225 m,罐体长l=12.5 m,罐内液体密度ρ=580 kg/m3。车辆其他主要仿真参数如表 1所示。
液罐车在公路上发生的事故主要是僻障失稳[15],所以本文采用双移线工况进行避障运动仿真分析。设充液比k=1.2、初始车速u=85 km/h。e0,e·0和θ0的阈值分别取2,12和2。方向盘转角输入如图 5所示。

|
| 图 5 方向盘转角 Fig. 5 Steering wheel angle |
从图 6~图 8可以看出,在车速为85 km/h、充液比k=1.2情况下,车辆未采用稳定性控制时,虽然挂车的横向载荷转移率LTR在±1范围内,车辆没有发生侧翻,但由于液体晃动剧烈,产生的晃动力和惯性力共同作用加剧了车辆的横摆运动,其铰接角和牵引车横摆角速度已经呈现等幅振荡,说明车辆在此工况下已经发生了“摆振”失稳。
由图 6、图 7可知,施加稳定性控制后,通过轮胎产生的附加横摆力矩同液体晃动对车辆产生的横摆力矩相反,抑制了罐体内液体的晃动,使液体对罐体的作用力快速趋于零值,如图 9所示,消除了车辆的“摆振”失稳,显著改善了车辆的横摆稳定性。从图 10还可以看出,稳定性控制系统还可以降低挂车的侧倾角峰值,提高车辆的侧倾稳定性。

|
| 图 6 牵引车横摆角速度 Fig. 6 Yaw rate of tractor |

|
| 图 7 铰接角曲线 Fig. 7 Curves of hinge angle |

|
| 图 8 挂车横向载荷转移率 Fig. 8 Lateral load transfer rate of trailer |

|
| 图 9 液体对罐体的作用力 Fig. 9 Force from liquid acting on tank |

|
| 图 10 挂车侧倾角 Fig. 10 Roll angle of trailer |
从图 11的牵引车横摆角速度e-$\dot e$相平面图中也可以看出,未施加稳定性控制前,e-$\dot e$终点并不收敛于原点附近,呈现等幅圆周运动,这也说明车辆出现了“摆振”失稳。当施加稳定控制后,系统能很好地将牵引车横摆角速度控制在允许的误差零带之内,将e-$\dot e$终点收敛于原点附近。

|
| 图 11 控制前后牵引车横摆角速度e-$\dot e$相平面 Fig. 11 e-$\dot e$ phase plane of tractor yaw rate before and after controlling |
图 12为控制时的目标制动车轮及相应的制动力矩。从图中可以看出,由于双移线工况前8 s车辆运行状态变化较大,控制系统以较高的制动频率修正车辆的运行姿态,以跟踪参考响应;当8 s后车辆重新回到原先路线时,为抑制液体的晃动,只要在最初时刻施加与液体晃动相反的附加横摆力矩,就可以使液体晃动快速收敛,并不需要频繁制动。

|
| 图 12 目标车轮制动力矩曲线 Fig. 12 Brake moment curves of goal wheels |
(1)根据流体力学、液体晃动理论和等效原则,建立圆柱形罐体内液体晃动的等效模型,并结合半挂车整车刚体模型,建立了半挂液罐车非线性动力学模型。
(2)选择牵引车横摆角速度和铰接角作为控制变量,在相平面内判断车辆运行工况和处于“不足-过度转向”的强弱程度,采用相应的差动制动实现附加横摆力矩控制车辆的稳定性。
(3)双移线工况仿真分析表明,基于相平面分区控制的方法可以有效抑制液体晃动对车辆的影响,提高了车辆的行驶稳定性,对半挂液罐车的安全运输有重要的工程应用意义。
| [1] | 杨秀建,杨春曦,张弦,等.基于主动制动的半挂汽车列车横摆稳定性控制[J].汽车工程,2011,33(11):955-961. YANG Xiu-jian,YANG Chun-xi,ZHANG Xian, et al. Yaw Stability Control for Tractor-semitrailer Combination Based on Active Braking[J]. Automotive Engineering,2011,33(11):955-961. |
| [2] | HAC A, FULK D, CHEN H. Stability and Control Considerations of Vehicle-trailer Combination[J]. SAE International Journal of Passenger Cars-Mechanical Systems, 2009, 1(1):925-937. |
| [3] | 宗长富,朱天军,麦莉,等.基于全局增益调度控制的重型半挂车主动侧倾控制算法[J].机械工程学报,2008,44(10):138-144. ZONG Chang-fu,ZHU Tian-jun,MAI Li, et al. Active Roll Control Algorithm of Heavy Tractor Semi-trailer Based on Global Gain Scheduling Control[J]. Chinese Journal of Mechanical Engineering, 2008,44(10):138-144. |
| [4] | 于志新,宗长富,何磊,等.基于LQR的重型半挂汽车列车稳定性控制策略[J].中国公路学报,2011,24(2):114-119. YU Zhi-xin,ZONG Chang-fu,HE Lei, et al. Stability Control Strategy for Heavy Semi-trailer Train Based on Linear Quadratic Regulator[J].China Journal of Highway and Transport,2011,24(2):114-119. |
| [5] | 岳宝增,祝乐梅,于丹.储液罐动力学与控制研究进展[J].力学进展,2011,41(1):79-92. YUE Bao-zeng,ZHU Le-mei,YU Dan. Recent Advances in Liquid-filled Tank Dynamics and Control[J]. Advances in Mechanics,2011, 41(1):79-92. |
| [6] | 程选生,杜永峰.弹性壁板下钢筋混凝土矩形贮液结构的液动压力[J].工程力学,2009,26(6):82-88. CHENG Xuan-sheng,DU Yong-feng. Dynamic Fluid Pressure of Reinforced Concrete Rectangular Liquid-storage Tanks with Elastic Walls[J].Engineering Mechanics,2009,26(6):82-88. |
| [7] | DJAVARESHKIAN H,KHALILI M. Simulation of Sloshing with the Volume of Fluid Method[J].Fluid Dynamics & Materials Processing,2006,2(4):299-308. |
| [8] | 刘奎,康宁.罐车转向时液体晃动的仿真分析[J].北京航空航天大学学报,2009,35(11):1403-1407. LIU Kui,KANG Ning. Simulation of Liquid Slosh in Turning Process of Tank Truck[J].Journal of Beijing University of Aeronautics and Astronautics,2009, 35(11):1403-1407. |
| [9] | 刘小民,许运宾.部分充液罐车动力学特性的数值模拟与分析[J].西安交通大学学报,2011,45(6):116-123. LIU Xiao-min,XU Yun-bin. Numerical Simulation for Dynamic Analysis of a Moving Truck with Partially Filled Liquid Tank[J]. Journal of Xi'an Jiaotong University,2011,45(6):116-123. |
| [10] | 王照林,刘延柱.充液系统动力学[M].北京:科学出版社,2002. WANG Zhao-lin,LIU Yan-zhu. Filling System Dynamics[M].Beijing:Science Press,2002. |
| [11] | 胡晓明,李万莉,朱为国,等.半挂液罐车的避障运动仿真分析[J].公路交通科技,2013,30(7):151-158. HU Xiao-ming,LI Wan-li,ZHU Wei-Guo,et al. Simulation of Obstacle Avoidance Motion of Liquid Tank Semi-trailer[J].Journal of Highway and Transportation Research and Developmen,2013,30(7):151-158. |
| [12] | KIENCKE U,NIELSEN L. Automotive Control Systems:For Engine, Driveline, and Vehicle[M].Berlin:Springer,2005. |
| [13] | 盖晓华,刘叔军.一种新的相平面分区控制器的分析与仿真[J].计算机仿真,2009,26(7):208-211,297. GAI Xiao-hua,LIU Shu-jun. Analysis and Simulation of Two-step Phase Plane Division Control[J]. Computer Simulation,2009,26(7):208-211,297. |
| [14] | 杨秀建,李耀平,熊坚.半挂汽车列车横向稳定性与失稳机理分析[J].汽车工程,2011,33(6):486-492. YANG Xiu-jian,LI Yao-ping,XIONG Jian. Analysis on the Lateral Stability and Instability Mechanism of Tractor-semitrailer Combination[J]. Automotive Engineering, 2011, 33(6):486-492. |
| [15] | 虞明远,李世武,解晓玲,等.道路危险货物运输监管过程分析及对策研究[J].公路交通科技,2010,27(8):155-158. YU Ming-yuan,LI Shi-wu,XIE Xiao-ling, et al. Analysis of Supervising Process of Road Hazardous Freight Transport and Countermeasures[J]. Journal of Highway and Transportation Research and Development,2010,27(8):155-158. |