 2015, Vol. 32
2015, Vol. 32扩展功能
文章信息
- 张邻, 吴伟明, 黄选伟
- ZHANG Lin, WU Wei-ming, HUANG Xuan-wei
- 基于分层序列的相邻信号交叉口控制系统动态优化模型
- A Dynamic Optimization Model of Adjacent Signal Intersection Control System Based on Stratified Sequence
- 公路交通科技, 2015, Vol. 32 (9): 121-127
- Journal of Highway and Transportation Research and Denelopment, 2015, Vol. 32 (9): 121-127
- 10.3969/j.issn.1002-0268.2015.09.020
-
文章历史
- 收稿日期: 2014-04-10


在城市路网中,交通拥堵现象普遍存在,而路网中的交叉口是拥堵主要发生地之一。信号交叉口作为城市路网的重要组成部分,是智能交通系统管理城市交通秩序的基本手段之一。相邻信号交叉口控制系统的配时参数影响着信号交叉口的通行效用,进而影响着路网的通行效用。相邻信号交叉口控制系统的配时参数包括信号周期时长、绿信比、相位差等。控制系统的设置主要根据各入口方向的车流量,以及协调相位车流运行特征,通过合理设置相邻信号交叉口控制系统的周期时长、绿信比和相位差,使得上游交叉口到下游交叉口的车辆获得尽量多的通行权。
国内外的许多专家学者对相邻信号交叉口的协调控制进行了深入研究[1, 2, 3, 4],提出了不同的模型与算法。常云涛等[5]以相邻信号交叉口的停车次数或总延误最小为目标,建立了城市干道协调模型,采用遗传算法对模型进行优化求解,但该方法直接设定各路段的平均速度,难以满足实时控制的需求。万绪军等[6]建立了线性系统相位差调节的最优化模型,使干线上、下行方向上的车辆延误最小,但线性系统未考虑相邻交叉口上转弯车流对相位差优化模型的影响。沈国江等[7]根据系统工程中的大系统分解-协调原理,建立了各交叉口之间互相协调的实时协调控制。Z. Tian等[8]根据最大绿波带法,以车辆延误、停车次数和行车速度为控制目标,设计了启发式算法。Y. Liu等[9, 10, 11]考虑交叉口转弯车辆对协调控制的影响,建立了以系统延误最小为目标的优化模型。上述模型中均将车辆在路段上的行驶速度设为常数,未考虑车速随着车流密度的变化,存在一定局限性,且目标函数单一,实用性不强。张萌萌等[12]采用差分方程的形式,建立了改进开放性边界条件的一维元胞自动机模型,模拟主干路协调控制的交通流状况,提出了相应的控制措施,但该模型只针对主干路单向单车道交通系统。
本文根据相邻信号交叉口上各入口方向车辆的到达情况,建立以信号交叉口协调相位车辆延误最小和交叉口消散量最大为目标的动态优化模型,并运用分层序列对双目标动态优化模型进行求解。根据相邻交叉口之间的不同路段长度,探讨协调相位控制的效果。
1 相邻信号交叉口控制系统的动态优化模型如图 1所示,路网中任意相邻信号交叉口i和j由双向路段相连,且该路段长为lij。令Ti为信号交叉口i的控制系统信号周期时长,Ki为信号交叉口i的控制系统信号相位集,Θ为交叉口i的东、西、南、北4个入口的集合,记为Θ={E,W,S,N},任意入口θ∈Θ,交叉口i的入口θ的左转、右转、直行车流方向分别用l,r,z表示,记为集合Ω={l,r,z}。任意车流η∈Ω,kiθη为控制交叉口i上入口θ方向η车流的相位,即kiθη∈Ki,λiθη为kiθη相位的绿信比。相邻信号交叉口信号控制系统实行协调相位控制,且协调相位为东西方向直行相位。令nij为交叉口i相对于交叉口j在第n周期协调相位的相位差,nji为交叉口j相对于交叉口i在第n周期协调相位的相位差。

|
| 图 1 两相邻信号交叉口 Fig. 1 Two adjacent signalized intersections |
令vη为η方向车流绿灯期间的车辆消散速度,qjθη(t)为j交叉口上θ入口η方向t时刻车流的车辆到达率,其中θ∈Θ,η∈Ω。在第n周期,Qnjθηy为j交叉口上θ入口η方向车流的消散剩余车流量,其中y表示消散剩余,则第n周期j交叉口上θ入口η方向车流的消散量Qnjθη可表示为:
式中 Qn-1jθηy为第n-1周期的j交叉口上θ入口η方向车流的消散剩余车流量。
在第n周期,由j交叉口进入a路段的车流量由3部分组成:j交叉口的S入口左转驶入车流量QnjNl,j交叉口的N入口右转驶入车流量QnjNr,j交叉口的E入口直行驶入的车流量QnjEz。车辆进入路段a后,分别根据自己的需求选择各自的车道到达i交叉口。i交叉口的控制路段a的相位中,控制直行车流的相位为i交叉口对j交叉口的协调相位。在第n周期,路段a上直行的车流由两部分组成:第n-1周期消散剩余的车辆,以及第n周期由j交叉口进入路段a选择直行的车辆。因此,受i交叉口对j交叉口的协调相位控制的a路段车流量QniEz为:
式中,Qnjθη为第n周期j交叉口上θ入口η方向车流的消散量,其中θ∈Θ,η∈Ω;pjθηz为j交叉口上θ入口η方向车流进入路段a后选择直行的车流所占的比例,其中θ∈Θ,η∈Ω。
在第n周期,i交叉口对j交叉口的协调相位红灯和黄灯期间累计到达的车流量QiEzhn可表示为:
式中,qiθη(t)为i交叉口上θ入口η方向t时刻车流的车辆到达率,其中θ∈Θ,η∈Ω;h表示红灯和黄灯期间。在第n周期,i交叉口对j交叉口的协调相位红灯和黄灯期间的延误da1由两部分组成:第n-1周期消散剩余车辆等待红灯的延误,以及第n周期红灯和黄灯期间到达的车流量等待红灯的延误,可表示为: 式中,λiθη为kiθη相位的绿信比,其中θ∈Θ,η∈Ω。

在第n周期,i交叉口对j交叉口协调相位绿灯开始,停车线前等待的车辆依次消散,后续到达的车辆需依次等待前面排队车辆消散完后才能通过交叉口。第n周期绿灯结束时,若第n-1周期消散剩余的车辆和第n周期期间内到达的车辆,比i交叉口对j交叉口协调相位的第n周期绿灯期间最大消散量小,则第n周期i交叉口对j交叉口的协调相位的消散量,即为第n-1周期消散剩余的车辆和第n周期期间内到达的车流量,否则消散量为第n周期i交叉口对j交叉口协调相位的最大消散量。因此,第n周期i交叉口对j交叉口的协调相位绿灯期间的消散量QiEzgn可表示为:
式中,g表示绿灯期间;vz表示直行车流绿灯期间的车辆消散速度。
因此,在第n周期,i交叉口对j交叉口的协调相位绿灯结束时,直行车道的消散剩余车辆数QiEzyn可表示为:

在第n周期,i交叉口对j交叉口的协调相位绿灯期间的车辆延误da2由车辆消散等待延误和消散剩余车流量的延误组成,因此,绿灯期间的车辆延误da2可表示为:

综上所述,在第n周期,路段a上i交叉口对j交叉口协调相位的车辆延误da可表示为:
即:
同理,在第n周期,路段b上j交叉口对i交叉口协调相位的车辆延误db可表示为:
1.2 约束条件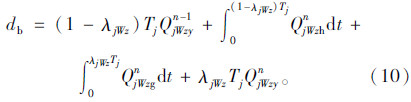
在信号交叉口控制系统设置中,为了保证车辆和行人能够安全通过交叉口,信号控制系统各相位有最短绿灯时间的限制,且各相位的绿灯时间不能无限大,因此信号控制系统各相位绿信比λiθη应满足下列条件:
式中,tmin为车辆和行人安全通过交叉口的最短绿灯时间;tmax为一个信号相位允许的最大绿灯时间。
设置信号交叉口控制系统的配时参数,若采用固定周期时长的方法,会易于控制系统的操作,但只适于车流波动较小的情况。当车流波动较大时,固定周期时长的方法不利于充分利用信号交叉口的通行效用,此时,允许周期时长在一定范围内波动。过短的周期时长不能保证给各相位分配最短的绿灯时间,无法保证车辆和行人安全通过交叉口,但过长的周期会导致交叉口绿灯信号时间的利用率降低,因此周期时长Ti应满足下列条件:
式中,Tmin为信号周期时长的下限;Tmax为信号周期时长的上限。
信号交叉口控制系统各相位绿灯时间总和不超过周期时长,各相位绿灯时间占周期时长的比例为绿信比,因此各相位绿信比总和不超过1,即:
1.3 最优相位差描述
i交叉口对j交叉口协调相位的最优相位差设置,应能够使由j交叉口进入路段a选择直行的车辆到达i交叉口时,路段a排队等待直行车辆在i交叉口正好开始绿灯,即i交叉口对j交叉口第n周期协调相位的最优相位差应满足下列条件:
式中,c为车辆在i交叉口停车线前排队时的车头时距;unji为第n周期由j交叉口进入路段a选择直行车辆的平均速度。
相邻信号交叉口协调相位的相位差满足闭合相位条件:
式中,Tn为i交叉口对j交叉口第n周期的公共周期,取为i交叉口对j交叉口信号周期的最大者,即Tn=max{Ti,Tj};k是非负整数。 1.4 动态优化模型
为了提高信号交叉口控制系统的通行效用,建立相邻信号交叉口控制系统的动态优化模型,通过调整信号交叉口控制系统的周期时长和绿信比,使得信号交叉口各入口方向的消散量最大。同时,调整相邻信号交叉口控制系统协调相位的相位差,使得相邻信号交叉口间协调相位车辆延误最小。优化模型如下:
1.5 分层序列求解模型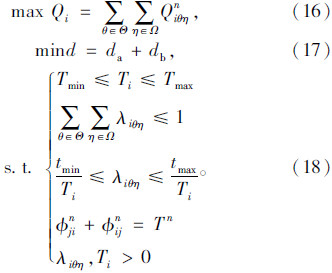
式(18)是多目标优化模型,这里运用分层序列进行求解。分层序列基本思想是将多目标函数按照主次进行排序,分层次逐步求解。相邻信号交叉口间协调相位的主要目标是使得直行车道的车辆延误尽可能小,其次是交叉口的消散量尽可能大,因此,式(18)求解的具体操作步骤如下。
(1)根据使直行车道车辆延误d尽可能小的主要目标,先计算最优化模型:
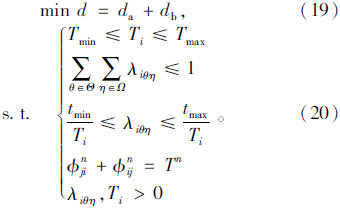
(2)获得目标函数的最优值d*,再根据交叉口消散量尽可能大的次要目标,兼顾协调相位的上述主要目标,求解最优化模型:
式中ε是一个一定大的数,是为了防止d≤d*条件要求过高而导致模型无解现象,给予一定的松弛,从而在约束条件中采取d≤d*+ε。
经过上述过程的求解,得到相邻信号交叉口控制系统最优的周期时长、各相位绿信比和相位差、信号交叉口的总消散量Q*i和协调相位的车辆延误d*。
2 算法实现根据相邻交叉信号控制系统的动态优化模型和分层序列模型,设计算法如下。
Step 1:初始化。给出路网中所有路段的流量初始值qjθη、仿真时间t0、周期时长Ti、绿信比λiθη、相位差ijn和jin的初始值,这里θ∈Θ,η∈Ω,并把协调相位的车辆延误d、交叉口的消散量Qi*和循环时间t′都置为0。
Step 2:由式(1)计算消散量Qniθη,并进一步得出Qi= 。
。
Step 3:计算式(9)、式(10),得d=da+db。
Step 4:求解多目标优化模型(18),执行以下步骤。
Step 4.1:求解模型(20),获得目标函数的最优值d*。
Step 4.2:给出一个正数ε,求解模型(22),获得最优值Q*i。
Step 5:令d:=d+d*,Qi:=Qi+Q*i。
Step 6:求Tn=max{Ti,Tj}。
Step 7:令t′:=t′+Tn,若t′
本算法中以时间t′为循环变量,当循环时间t′达到仿真时间t0时结束循环。每个循环得到相邻信号交叉口控制系统最优的周期时长、各相位绿信比和相位差。
3 算例分析图 2中的简单有向路网由4个信号交叉口D,F,G,H依次相连组成。4个信号交叉口控制系统的信号相位设置与相位显示的顺序如图 3所示,其中信号相位1为相邻信号交叉口的协调相位。

|
| 图 2 简单有向路网 Fig. 2 Simple directed road network |

|
| 图 3 交叉口的信号相位与时序 Fig. 3 Signal phases and phase sequences of intersections |
为了保证机动车、非机动车和行人安全通过信号交叉口,令每个绿灯的最短时间为20 s,信号交叉口周期时长的上限为180 s,下限为100 s,每个相位阶段的黄灯时间均为3 s。绿灯时机动车的消散速度设为0.3 veh/s。
交叉口上各入口方向的动态交通需求如表 1所示。
| 交叉口 | D | F | G | H | ||||||
| 北入口 | 西入口 | 南入口 | 北入口 | 南入口 | 北入口 | 东入口 | 南入口 | 北入口 | 南入口 | |
| 左转方向 | 756 | 756 | 540 | 576 | 432 | 756 | 504 | 684 | 684 | 612 |
| 右转方向 | 756 | 684 | 540 | 684 | 486 | 612 | 540 | 504 | 720 | 630 |
| 直行方向 | 1 160 | 2 232 | 1 116 | 1 440 | 1 224 | 1 332 | 2 124 | 1 476 | 1 404 | 1 404 |
车辆进入相邻交叉口间的路段后,选择直行的车流所占的比例如表 2所示。
| 路段 | 1 | 2 | 3 | 4 | 5 | 6 |
| 直行车辆/% | 78 | 81 | 75 | 80 | 82 | 79 |
| 左转车辆/% | 9 | 11 | 10 | 8 | 7 | 9 |
| 右转车辆/% | 13 | 8 | 15 | 12 | 11 | 12 |
统计进入各路段的车流密度,用式(23)(Greenshields速度-密度关系模型)计算车辆在各路段上行驶的平均速度u:
式中,kmax为路段的阻塞密度,取为135 veh/km;uf为路段的自由流速度,如表 3所示。
| 路段 | 1,6 | 2,5 | 3,4 |
| 长度/m | 200 | 350 | 550 |
| 自由流速度/(km·h -1) | 25 | 25 | 30 |
在仿真模拟中,仿真时间设为15 min,初始相位差设为路段长度与路段平均速度的比值。为了验证任意相邻信号交叉口控制系统动态优化模型的有效性,同时运用固定信号控制进行比较。固定信号控制的配时参数如表 4所示,相邻交叉口协调相位的相位差分别为DF=75 s,FG=75 s,GH=75 s。
| 信号交叉口 | D | F | G | H |
| 周期时长/s | 150 | 150 | 150 | 150 |
| 相位1绿信比 | 0.27 | 0.27 | 0.27 | 0.27 |
| 相位2绿信比 | 0.19 | 0.19 | 0.19 | 0.19 |
| 相位3绿信比 | 0.27 | 0.27 | 0.27 | 0.27 |
| 相位4绿信比 | 0.19 | 0.19 | 0.19 | 0.19 |
固定信号控制与协调相位的车辆延误仿真结果见表 5。对比二者发现,动态优化模型控制的直行车道效用有了显著提高。交叉口D与交叉口F之间的路段长为200 m,协调控制的直行车道效用提高了14.47%;交叉口F与交叉口G之间的路段长为350 m,协调控制的直行车道效用提高了11.01%;交叉口G与交叉口H之间的路段长为550 m,协调控制的直行车道效用提高了7.91%。相邻交叉口之间的路段长度较短时,协调控制的效用增加明显。随着相邻交叉口之间路段长度的增加,协调控制提高的效用降低,这是因为随着相邻交叉口之间路段长度的增加,车辆在相邻交叉口路段行驶过程的离散程度越来越大,使协调相位控制的效果减弱。因此,当相邻交叉口之间的路段长度较短时,对相邻交叉口进行协调相位控制非常必要。
| 相邻交叉口 | D与F | F与G | G与H |
| 固定信号控制/(×10 3 s) | 7.313 9 | 6.497 2 | 8.127 2 |
| 动态信号控制/(×10 3 s) | 6.255 7 | 5.782 | 7.487 8 |
| 提高的效用/% | 14.47 | 11.01 | 7.91 |
固定信号控制和动态信号控制交叉口各方向的总体消散量见表 6。与固定信号控制相比,动态信号控制提高了交叉口的总体消散量,效用的提高幅度为2.84%左右。这是由于固定信号控制模型的周期时长、各相位绿信比和相位差是固定的,当车流波动性较大时,不能根据信号交叉口各入口方向车辆的到达情况灵活分配各入口方向对应相位的通行权。固定协调相位控制的绿灯开始时间间隔不变,绿灯开始时间不能根据车流到达的情况进行实时变化,使直行车辆通过下游交叉口的时间增加。而动态优化模型根据相邻信号交叉口各入口方向车流的运行情况动态分配通行权,到达率较大的入口方向获得更多的通行权,到达的车辆能够尽快通过交叉口,并协调设置下游交叉口对上游交叉口的相位差,使从上游交叉口驶入并且选择直行的车流能尽快通过下游交叉口,减少了直行车流通过下游交叉口的延误。
| 信号交叉口 | D | F | G | H |
| 固定信号控制/veh | 2 608 | 2 740 | 2 604 | 2 910 |
| 动态信号控制/veh | 2 682 | 2 818 | 2 678 | 2 959 |
| 提高的效用/% | 2.84 | 2.85 | 2.84 | 1.68 |
根据相邻信号交叉口各入口方向的车辆到达情况,以通过交叉口消散量最大及协调相位的车辆延误最小为目标,建立了多目标优化模型。运用分层序列法,动态优化了相邻信号交叉口控制系统的配时参数。动态优化模型根据信号交叉口各入口方向车辆的到达率来计算各入口方向通行权的大小,到达率较大的入口方向对应的相位获得较多的通行权,且根据协调相位控制的入口方向车流到达情况设计了协调相位的相位差,使得协调相位控制的入口方向车辆延误最小。与固定信号控制模型比较,动态优化模型显著提高了相邻信号交叉口控制系统协调控制的效用,并提高了信号交叉口的通行能力。对比相邻交叉口间路段长度不同的情况下协调控制的效果表明,在相邻交叉口之间路段长度较短的情况下,运用协调控制能显著提高协调相位控制直行车道的通行效用。下一步工作是结合混合交通流下的协调控制对区域交通的协调控制进行研究。
| [1] | 张邻, 杜文, 向红艳. 基于合同模式交通分配模型和求解算法[J]. 公路交通科技, 2010, 27(2) :97-102. ZHANG Lin, DU Wen, XIANG Hong-yan. Traffic Assignment Model and Solution Algorithm in Transportation Network Based on Contract Mode[J]. Journal of Highway and Transportation Research and Development, 2010, 27(2): 97-102. |
| [2] | 南天伟, 敖梦雅, 魏丽英. 基于模糊神经网络的城市干道信号协调控制[J]. 公路交通科技, 2012, 29(1): 145-149. NAN Tian-wei, AO Meng-ya, WEI Li-ying. Traffic Signal Coordination for Urban Arterial Roads Based on Fuzzy Neural Network[J]. Journal of Highway and Transportation Research and Development, 2012, 29(1): 145-149. |
| [3] | 梁杰, 徐建闽. 周期不同的多交叉口协调控制方法[J]. 公路交通科技, 2013, 30(8): 118-122. LIANG Jie, XU Jian-min. A Coordinated Control Method of Multiple Intersections in Different Cycles[J]. Journal of Highway and Transportation Research and Development, 2013, 30(8):118-122. |
| [4] | 朱和, 常玉林. 基于灵活相位的双向绿波协调控制[J]. 公路交通科技, 2013, 30(7): 140-143. ZHU He, CHANG Yu-lin. Bidirectional Green Wave Coordinative Control Based on Flexible Phase[J]. Journal of Highway and Transportation Research and Development, 2013, 30(7): 140-143. |
| [5] | 常云涛, 彭国雄. 基于遗传算法的城市干道协调控制[J]. 交通运输工程学报, 2003, 3(2):106-112. CHANG Yun-tao, PENG Guo-xiong. Urban Arterial Road Coordinate Control Based on Genetic Algorithm[J]. Journal of Traffic and Transportation Engineering, 2003, 3(2): 106-112. |
| [6] | 万绪军, 陆化普. 线控系统中相位差优化模型的研究[J]. 中国公路学报, 2011, 14(2):99-102. WAN Xu-jun, LU Hua-pu. An Optimal Offset Model for Artery Traffic Signal Control System[J]. China Journal of Highway and Transport, 2011, 14(2): 99-102. |
| [7] | 沈国江, 孙优贤. 城市交通干线递阶模糊控制及其神经网络实现[J]. 系统工程理论与实践, 2004, 24(4):99-105. SHEN Guo-jiang, SUN You-xian. Hierarchical Fuzzy Control for Urban Traffic Trunk Roads and Its Neural Network Implementation[J]. Systems Engineering-Theory & Practice, 2004, 24(4): 99-105. |
| [8] | TIAN Z, URBANIK T. System Partition Technique to Improve Signal Coordination and Traffic Progression [J]. |
| [9] | LIU Y, CHANG G L. An Arterial Signal Optimization Model for Intersections Experiencing Queue Spillback and Lane Blockage [J]. |
| [10] | LI Z C. Modeling Arterial Signal Optimization with Enhanced Cell Transmission Formulations [J]. |
| [11] | 王正武, 罗大庸, 黄中祥, 等. 线控系统协调优化模型及其改进粒子群算法研究[J]. 系统工程理论与实践, 2007, 27(10):165-171. WANG Zheng-wu, LUO Da-yong, HUANG Zhong-xiang, et al. Optimal Coordination of Artery System Based on Modified Particle Swarm Algorithm [J]. Systems Engineering-Theory & Practice, 2007, 27(10):165-171. |
| [12] | 张萌萌, 贾磊. 城市协调控制主干路交通流模型[J]. 控制理论与应用, 2011, 28(11):1679-1684. ZHANG Meng-meng, JIA Lei. Mathematical Model of Traffic Flow on Arteries with Coordinated Control System[J]. Control Theory & Applications, 2011, 28(11): 1679-1684. |