 2015, Vol. 31
2015, Vol. 31扩展功能
文章信息
- 卢守峰, 王杰, 薛智规, 刘喜敏
- LU Shou-feng, WANG Jie, XUE Zhi-gui, LIU Xi-min
- 考虑超车需求的交通流中观模型
- A Mesoscopic Traffic Flow Model Considering Overtaking Demand
- 公路交通科技, 2015, Vol. 31 (6): 118-122
- Journal of Highway and Transportation Research and Denelopment, 2015, Vol. 31 (6): 118-122
- 10.3969/j.issn.1002-0268.2015.06.018
-
文章历史
- 收稿日期:2014-08-18


2. 长沙市公安局交通警察支队, 湖南 长沙 410012
2. Traffic Police Detachment, Changsha Public Security Bureau, Changsha Hunan 410012, China
交通流在低密度的情况下是单个汽车的运动,与其他车辆之间的关系不大,反之,在高密度时则以车队形式流动,这一事实启示了交通流与气体流动的相似性。交通流中观模型的开创者是Prigogine和Herman。关于Prigogine和Herman创建的交通流中观模型的系统论述可见其1971年出版的专著《车辆交通动力论》[1]。
Prigogine-Herman模型的方程为:
这个方程描述了速度分布函数f(x,v,t)的演化,式(1)右边的松弛项、相互作用项、修正项分别为:



 是车辆密度;一阶矩
是车辆密度;一阶矩
 t)dv 是平均速度; P为超车概率,是密度c的函数,
t)dv 是平均速度; P为超车概率,是密度c的函数, ,其中cp为阻塞密度; T为松弛时间,是密度c的函数。
,其中cp为阻塞密度; T为松弛时间,是密度c的函数。近年来,应用数学领域的学者Delitala和Tosin[2]基于数学动力论方法提出了另一种交通流中观模型,对车辆的加速和减速过程进行了重新建模。Prigogine-Herman模型和Delitala-Tosin模型的方程均为积分微分方程,难于求解。卢守峰等[3, 4]将元胞传输模型与Prigogine-Herman 模型、改进的 Delitala-Tosin 模型进行集成,建立了离散的交通流中观模型,模型易于求解。
交通流是由车辆-驾驶员构成的,与牛顿力学中的牛顿粒子的区别是包含人的因素,因此其具有自驱动性。牛顿粒子是各向同性的,车流的特点是各向异性的。将交通流的自驱动性包含在交通流中观模型中一直是研究的重点。Prigogine-Herman 模型中引入了松弛项,松弛项描述了驾驶员向期望车速的逼近,反映了车辆与气体分子的差别。但是松弛项只是唯象表述,没有关于机理的推导。Nelson[5]采用关联模型和力学模型对加速项进行了解析推导,发展了 Prigogine-Herman 模型,改进了该模型的唯象松弛项。Paver-Fontana[6]将速度分布函数扩展为速度与期望速度的联合分布函数,对这一模型做了改进,但是速度与期望速度的联合分布函数的数学形式难以确定。卢守峰等[7]引入期望速度对Delitala-Tosin模型进行了改进,得出了交通流平均速度不仅与密度有关,而且与期望速度差异有关的结论。荣建等[8]将超车过程划分为超车意愿、超车条件、超车行为、超车中止强制回车4个步骤,建立了超车模型。本文通过对驾驶员换道的决策过程进行分析,考虑超车需求,利用期望速度对Prigogine-Herman模型的超车概率公式进行改进,并建立相应的交通流中观模型,使得交通流中观模型更加符合实际。
1 改进的超车概率公式换道的决策过程基于驾驶员对周围车辆的感知。换道主要受到驾驶意愿和相邻车道的实际交通状况两个方面的影响。驾驶意愿就是实现驾驶员自身的期望速度。在换道的过程中,每个驾驶员面对3个问题[9]:(1)想要换道吗?(2)相邻车道的驾驶状况有利吗?(3)可以换到相邻车道吗?如果这3个问题都得到肯定回答,那么就可以换道。换道包括从快车道到慢车道、从慢车道到快车道两种类型。从快车道到慢车道换道源于要转向或驶出当前道路等需求。从慢车道到快车道换道源于受到本车道前方车辆的阻碍,阻碍程度是前车车速与本车期望车速之差的函数。换道操作的安全程度由车间距和速度差确定。
Prigogine-Herman 模型的超车换道概率公式是
超车概率不仅与密度有关,而且与期望速度有关。当车速与期望车速相差越大时,超车需求越大;反之越小。
改进的超车概率公式为:
对于改进的超车概率,当密度较小时,所有车辆经过一段时间后速度将达到期望速度ω,此时超车概率P=0,交通流达到稳态;当密度为阻塞密度时,超车概率P=0。
为了更好地显示超车概率与密度、期望速度的关系,假设速度密度满足Greenshields线性公式,速度
当速度密度关系符合Underwood的指数模型,速度
从图 2和图 3可以看出,改进的超车概率与密度之间的关系是非线性的,呈抛物线型。当密度处于较低值和较高值时,超车概率较小,这是因为密度较低时车辆间干扰较少,容易达到期望速度,超车需求较小,因此超车概率较小;当密度较高时,车辆间干扰较大,车间距不允许超车,因此超车概率较小。因此改进的超车概率公式较好地反映了超车需求和车间距是否容许超车两个因素。
当车辆不能超车时,表明要与其他车辆相互作用,不能超车的概率是1-P。将改进的超车概率P的式(5)代入式(3)和式(4)中得到新的中观交通流模型。
新的中观交通流模型利用元胞传输模型离散化进行求解,这种方法的详细介绍见文献[3]。元胞传输模型是Daganzo[10]提出的求解宏观交通流模型的方法,该方法简单、易于计算。每个元胞的密度更新公式为:
将元胞内的变量进行扩展,包括车辆数和速度分布。图 4中的符号含义:i-1为第i-1个元胞; ni-1(t)为第i-1个元胞内的车辆数; f(i-1,v,t)为t时刻第i-1个元胞内速度为v的车辆数。
第i个元胞内的速度分布演化由下列公式计算:
当vmin≤v≤vmax时,
当v< vmin时,
松弛过程由以下指数松弛函数表示:
,c 是归一化密度,为无量纲变量。该公式表明密度越大,超车概率越小,这是从唯象角度研究超车,没有考虑速度与期望速度的关系,没有详细描述车辆间的微观相互作用。超车概率与密度的关系是线性的,图 1给出了超车概率P与归一化密度之间的关系。随着密度的增加,超车概率线性减小,没有体现超车概率与临界密度的关系。
是归一化密度,为无量纲变量。该公式表明密度越大,超车概率越小,这是从唯象角度研究超车,没有考虑速度与期望速度的关系,没有详细描述车辆间的微观相互作用。超车概率与密度的关系是线性的,图 1给出了超车概率P与归一化密度之间的关系。随着密度的增加,超车概率线性减小,没有体现超车概率与临界密度的关系。

图 1 Prigogine-Herman模型中的超车概率与归一化密度的关系
Fig. 1 Relation between overtaking probability and normalized density in Prigogine-Herman model 
 。假设所有车辆的期望速度均为ω,则
。假设所有车辆的期望速度均为ω,则 。超车概率与归一化密度的关系如图 2所示。
。超车概率与归一化密度的关系如图 2所示。

图 2 改进的超车概率与归一化密度的关系(速度-密度关系为Greenshields公式)
Fig. 2 Relation between overtaking probability and normalized density in proposed formula (speed-density relation is Greenshields formula)  时,假设所有车辆的期望速度均为ω,则
时,假设所有车辆的期望速度均为ω,则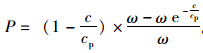 。超车概率与归一化密度的关系如图 3所示。
。超车概率与归一化密度的关系如图 3所示。

图 3 改进的超车概率与归一化密度关系(速度-密度关系为Underwood公式)
Fig. 3 Relation between overtaking probability and normalized density in proposed formula (speed-density relation is Greenshields formula) 

图 4 元胞和元胞内的变量
Fig. 4 Cell and cellular variables 


为了分析建立的离散交通流中观模型的性能,对初始密度不连续的情况进行了研究。设初始密度分布为:

流量-密度函数为:

流量-密度公式是根据检测器数据拟合得到的,可计算出本例中的阻塞密度为224.3 veh/km,即11.2 veh/cell;临界密度为58.8 veh/km,即2.94 veh/cell。
初始条件:对1条1 000 m的道路上的交通流进行仿真,前500 m道路的密度为107 veh/km,后500 m 道路的密度为39 veh/km,这两种密度对应的速度分布如图 5所示。本文建立的是离散交通流模型,将速度区间0~120 km/h离散为24个小区间,离散步长是5 km/h。

|
| 图 5 密度为107 veh/km和39 veh/km时的速度分布 Fig. 5 Speed distribution in densities of 107 veh/km and 39 veh/km |
使用的参数为元胞长度Δx=50 m,每步的时间间隔Δt=2 s,松弛时间T取300 s。将速度0~120 km/h 划分为24个速度,每个速度类的区间是5 km/h。道路长度设定为1 000 m,元胞数量为20个。元胞0和元胞19是边界元胞,这两个元胞在任何时刻都保持初始密度不变,如图 6所示。

|
| 图 6 元胞描述 Fig. 6 Cell description |
分别采用线性超车概率公式和Greenshields超车概率公式对算例进行模拟,元胞密度演化的结果是相同的,如图 7所示。元胞内的速度分布演化对比如图 8、图 9所示,其中图 8表示第9个元胞内的速度分布演化,图 9表示第12个元胞内的速度分布演化。

|
| 图 7 元胞密度演化 Fig. 7 Cell density evolution |

|
| 图 8 第9个元胞速度分布演化对比 Fig. 8 Comparison of speed distribution evolution in the 9th cell |

|
| 图 9 第12个元胞速度分布演化对比 Fig. 9 Comparison of speed distribution evolution in the 12th cell |
从图 8、图 9可以看出,采用Prigogine-Herman模型中的线性超车概率公式和greenshields超车概率公式得到的元胞密度演化是相同的。对于元胞内的速度分布演化,两个模型间有较大区别,采用线性超车概率公式速度分布演化较快,且全部集中在2,3,4速度类;采用Greenshields模型的超车概率公式可以反映速度分布演化的动态过程,速度分布先向低速度组演化,然后向高速度组演化,描述了车辆从高密度区向低密度区的扩散过程,速度分布收敛在2,3,4,5,6,7速度类,更加符合实际。
3 结论本文首先分析了换道决策过程,分析了Prigogine-Herman模型线性超车概率公式的不足。通过引入期望速度,提出了新的超车概率公式。针对Greenshields线性速度-密度关系和Underwood指数速度-密度关系,绘制了相应的超车概率曲线,曲线均呈抛物线型。当密度处于较低值和较高值时,超车概率较小,这是因为密度较低时车辆间干扰较少,容易达到期望速度,超车需求较小,因此超车概率较小;当密度较高时,车辆间干扰较大,车间距不允许超车,因此超车概率较小。因此改进的超车概率公式较好地反映了超车需求和车间距是否容许超车的两个因素。将改进的超车概率公式与基于元胞传输模型的离散交通流中观模型结合,得到了新的交通流中观模型。通过算例分析了线性超车概率公式和Greenshields超车概率公式的区别。结果表明,采用线性超车概率公式速度分布演化较快,且全部集中在2,3,4速度类。采用Greenshields模型的超车概率公式可以反映速度分布演化的动态过程,速度分布先向低速度组演化,然后向高速度组演化,描述了车辆从高密度区向低密度区的扩散过程,速度分布收敛在2,3,4,5,6,7速度类,更加符合实际。
值得进一步研究的是:对Prigogine-Herman模型中的瞬间加减速假设需进行改进。Prigogine-Herman模型包括相互作用过程和松弛过程。在相互作用过程中,高速度向低速度转换,文中算例最高速度是120 km/h,最低速度是0 km/h,每步仿真时长是2 s,因此最大减速度是16.7 m/s2。在松弛过程中,低速度向高速度转换。文中速度分布向期望速度分布的逼近采用的是指数函数形式。同样,最大加速度是16.7 m/s2。加速度和减速度与实际是不符的,这主要由于 Prigogine-Herman 模型假设车辆是瞬间减速或加速的,在后续研究中可以对瞬间加减速假设进行改进。
| [1] | PRIGOGINE I, HERMAN R. Kinetic Theory of Vehicular Traffic[M]. New York: Elsevier Press, 1971. |
| [2] | DELITALA M, TOSIN A. Mathematical Modeling of Vehicular Traffic: A Discrete Kinetic Theory Approach[J]. |
| [3] | LU Shou-feng, DAI Shi-qiang, LIU Xi-min. A Discrete Traffic Kinetic Model-integrating the Lagged Cell Transmission and Continuous Traffic Kinetic Models[J]. |
| [4] | A New Traffic Kinetic Model for Heterogeneous Condition[J]. International Journal of Non-linear Mechanics, 2013,55:1-9. |
| [5] | NELSON P. A Kinetic Model of Vehicular Traffic and Its Associated Bimodal Equilibrium Solutions[J]. |
| [6] | PAVERI-FONTANA S L. On Boltzmann-like Treatments for Traffic Flow: A Critical Review of the Basic Model and an Alternative Proposal for Dilute Traffic Analysis[J]. |
| [7] | LU Shou-feng, LIU Gai-hong, LIU Xi-min. A Traffic Kinetic Model Considering Desired Speed[J]. |
| [8] | 荣建,刘世杰,邵长桥,等,超车模型在双车道公路仿真系统中的应用研究[J]. 公路交通科技, 2007,24(11):136-139. RONG Jian, LIU Shi-jie, SHAO Chang-qiao, et al. Application of Overtaking Model in Two-lane Highway Simulation System[J]. Journal of Highway and Transportation Research and Development, 2007,24(11):136-139. |
| [9] | WIEDEMANN R, REITER U. Microscopic Traffic Simulation: the Simulation System Mission, Background and Actual State[R]. Brussels: CEC European Managers, 1991. |
| [10] | DAGANZO C F. The Cell Transmission Model: A Dynamic Representation of Highway Traffic Consistent with the Hydrodynamic Theory[J]. |