 2021, Vol. 38
2021, Vol. 38扩展功能
文章信息
- 李娟, 贾庭勇
- LI Juan, JIA Ting-yong
- 基于人均延误的交叉口信号配时优化
- Signal Timing Optimization for Intersection Based on Per Capita Delay
- 公路交通科技, 2021, 38(11): 134-141
- Journal of Highway and Transportation Research and Denelopment, 2021, 38(11): 134-141
- 10.3969/j.issn.1002-0268.2021.11.016
-
文章历史
- 收稿日期: 2020-12-08


2. 西南交通大学 综合交通运输智能化国家地方联合工程实验室, 四川 成都 611756
2. National United Engineering Laboratory of Integrated and Intelligent Transportation, Chengdu Sichuan 611756, China
早期的交叉口信号配时方法仅以机动车为研究对象,通过建立使机动车车均延误最小、停车次数最少或保证绿灯时期车辆全部驶出进口道为目标的模型对信号控制方案进行设计,典型的模型包括Webster配时法[1]、ARRB法[2]和HCM(2010)[3]。此类方法将所有机动车等同看待,无法体现大客车载客多的特性[4]。鉴于此,相关学者从人均延误角度提出信号配时优化模型,引入机动车乘客数作为修正参数,消除了不同类型机动车载客率的差异性[5-7],但上述研究均未涉及到非机动车和行人。
在信号控制交叉口,机非混合行驶常常造成交叉口通行秩序混乱,影响了交叉口的通行效率和安全[8-9]。为此,相关学者对混合交通流环境下机非运行特性及相互冲突情况进行了深入研究:蒋海峰[10]在其博士论文中详细研究了混合交通流的干扰机理问题;景春光等[11]根据交叉口机非冲突情况,提出了非机动车提前截止时间和临界流量计算模型[11];但上述研究只是将非机动车和行人当作干扰因素进行考虑,未从整体上对机非混合条件下的信号控制作优化研究。陈小红等[12]、王雪元[13]将非机动车和行人统一看作慢行交通,在混合交通条件下对交叉口进行信号配时优化研究,但前者在慢行延误计算时未对不同转向交通流作区分,后者虽详细推导了不同转向慢行交通的延误计算方式,但其研究仅针对2次过街模式,未涉及到四相位交叉口左转非机动车可以采取1次过街的组织模式。非机动车采用不同过街模式对交叉口会产生不同的影响,目前尚没有明确统一规定左转非机动车采用何种模式过街。杨晓光、陈晓明等[14-15]根据非机动车的不同过街模式,分别建立了非机动车影响下的机动车通行能力模型,分析不同交通条件下非机动车采用不同过街模式对交叉口通行效率的影响,但均未对信号配时情况进行研究;赵亚杰[16]针对非机动车在不同过街模式下分别做了信号配时优化对比分析,但其配时模型未区分不同交通方式之间载客率的差异性。
综上,国外学者关于交叉口信号配时主要针对机动车进行研究,非机动车和行人往往只作为干扰因素对模型进行修正,对于非机动车不同过街模式以及不同交通方式的差异性考虑不足。因此,本研究将机动车、非机动车和行人作为研究对象,并以交叉口人均延误最小为优化目标,对非机动车不同过街模式分别建模进行信号配时优化。最后,以实际交叉口数据为基础进行测算,对比分析交叉口在不同交通条件下非机动车采用不同过街模式的综合运行效果,为相关交叉口的交通组织与管控提供参考。
1 信号配时优化模型 1.1 优化目标平面交叉口的通行延误直接反映了交叉口的通行效率,同时也间接反映了交叉口的通行能力和交通拥挤状况。研究表明,非饱和交通状态下,信号交叉口延误主要包括信号延误、冲突延误和绕行延误[13]。其中,信号延误是由于信号灯交替变换而产生的;冲突延误是由于不同流向交通流相互交叉,导致部分交通流减速让行而产生的,以左转交通流造成的冲突最为显著;绕行延误主要针对左转行人和非机动车,由于两次直行实现左转而增加过街距离,从而产生绕行延误。本研究以典型四相位交叉口为研究对象,其左转交通流有专用相位,冲突延误可忽略不计。因此,机动车延误主要考虑信号延误部分,非机动车和行人延误考虑信号延误和绕行延误。
1.1.1 机动车延误机动车通行延误参考HCM2010中的延误计算模型[3],此模型适用于车道组饱和度X低于1的交叉口。HCM法在计算延误时将交叉口进行了车道组划分,基于车道组的延误计算模型为:
|
(1) |

|
(2) |

|
(3) |
式中,d1为均匀控制延误;g为车道组有效绿灯时间;C为信号周期;X为车道组饱和度,X=λjv/sj,λjv为车道组j实际流率之和,sj为车道组j饱和流率;d2为增量延误;T为分析期时长;k为增量延误参数,和控制设定相关;P为交叉口上游筛选的或测量的校正系数;c为车道组通行能力;dj为车道组j平均控制延误;PF为信号联动系数,HCM2010中给出了不同到达类型下PF的选择说明,一般取1.00。
一个周期内进口道A总延误dA及交叉口总延误DV分别为:
|
(4) |

|
(5) |
为方便讨论,在计算非机动车延误时作如下假设:(1)非机动车到达服从均匀分布;(2)在进口道等候绿灯的非机动车,在获得绿灯信号时,所有非机动车同时过街;(3)非机动车在每个周期内能全部放行完,无跨越周期等候的非机动车。非机动车在不同过街模式下其通行延误不同,下面分别进行分析。
1.1.2.1 一次过街模式四相位信号控制交叉口非机动车采用1次过街模式时,非机动车通行规则同机动车,不同流向的非机动车延误均为1次等待绿灯的延误。由于非机动车均匀到达,故可得相位i非机动车的平均信号延误和一个周期内总延误[3]分别为:

|
(6) |
|
(7) |
式中,C为信号周期;gi为第i相位绿灯时间;n为相位数;λbi为第i相位非机动车实际流率之和。
1.1.2.2 二次过街模式(1) 信号延误
根据国内多个城市交叉口实地调查,本研究认为非机动车和行人是可逆行的,即左转非机动车和行人会选择距到达交叉口时刻最近的直行相位完成第1次过街。以南进口的左转非机动车为例,如图 1所示,当非机动车到达进口道A时,会等候AB或AD方向的直行绿灯信号,待完成第1次过街后,继续在B点(或D点)等待下一直行相位通过街道BC或DC,从而实现左转过街。

|
| 图 1 非机动车流向 Fig. 1 Directions of non-motor vehicle volumes |
| |
由于2次过街模式下直行非机动车和行人依然只有1次穿越街道的过程,故其延误计算方式同1次过街模式,而不同时刻到达的左转非机动车需要分别讨论。典型四相位交叉口的信号相位方案为南北直行+南北左转+东西直行+东西左转,分别记为相位i=1, 2, 3, 4。以南进口左转非机动车为例,其选择初始过街方向(顺行方向1或逆行方向2)的概率和该方向的优先通行时间成正比,此处某方向的优先通行时间为另一方向直行绿灯结束至本方向直行绿灯结束之间的时间段,如图 2所示,g1和g2分别为两个方向的直行绿灯时间,t2即为方向2的优先通行时间。

|
| 图 2 优先通行时间示意图 Fig. 2 Schematic diagram of priority transit time |
| |
则进口道A一个周期内选择方向j(j=1, 2)的左转非机动车数为:

|
(8) |
式中,λAbl为A进口道左转非机动车到达率;tj为方向j的优先通行时间。
选择顺行方向的左转非机动车中延误最大和最小的车辆分别为第1辆车和最后1辆车,延误值分别为:

|
(9) |
|
(10) |
式中,gi为该进口道直行相位绿灯时间;gi+1为其下一相位绿灯时间,当i=4时,令i+1=1;I为绿灯间隔时间;l1为顺行方向街道的宽度;vb为非机动车过街速度。
根据式(9)和(10),选择顺行方向的左转非机动车平均信号延误为:
|
(11) |
同理,选择逆行方向的左转非机动车平均信号延误为:

|
(12) |
式中l2为逆行方向街道的宽度。
从而,1个周期内进口道A左转非机动车总延误dAbl及交叉口左转非机动车总延误DAbl可分别表示为:

|
(13) |

|
(14) |
可得交叉口2次过街模式下非机动车1个周期内信号延误为:
|
(15) |
(2)绕行延误
左转非机动车2次过街模式下存在2次直行过街过程,相比于1次过街模式存在因绕行而产生的绕行延误,假设1次过街模式下左转非机动车的轨迹为对角线,从而左转非机动车1个周期内交叉口总绕行延误DBb为:
|
(16) |
式中λbl为交叉口左转非机动车到达率之和。
综上,四相位交叉口非机动车总延误可表示为:

|
(17) |
式中,γ取0或1,γ取1时代表非机动车采用1次过街模式,反之为2次过街模式。
1.1.3 行人通行延误行人在通行特性及习惯上跟非机动车有很大的相似性,在没有行人专用道及专用相位时,一般认为左转行人遵循2次过街规则。因此,本研究行人延误参考非机动车2次过街模式下的计算方法,则进口道A 1个周期内选择方向j(j=1, 2)的左转行人数为:

|
(18) |
式中λApl为A进口道左转行人到达率。
各进口道选择顺行和逆行的左转行人平均延误分别为:
|
(19) |

|
(20) |
式中vp为行人过街速度。
1个周期内进口道A左转行人总延误dApl及交叉口左转行人总延误DApl可分别表示为:

|
(21) |

|
(22) |
可得交叉口2次过街模式下行人1个周期内信号延误为:
|
(23) |
行人绕行延误为:
|
(24) |
式中λPl交叉口左转行人到达率之和。
从而交叉口行人总延误为:
|
(25) |
根据不同类型车辆的平均载客率可求得整个交叉口的人总延误,再除以1个周期内通过的总人数可得交叉口的人均延误为:
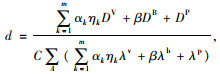
|
(26) |
式中,αk为第k种类型机动车平均载客率,根据实地调查确定;ηk为第k种类型机动车所占比例,
(1) 信号周期C
在一定的道路条件下,信号控制交叉口周期时长越长,一定时间内相位切换次数就越少,从而损失时间也越少,交叉口的通行能力越大,但通行延误及排队长度等也随信号周期的增加而增大。因此,周期时长不宜过大,此处取最大周期时长为200 s,最短周期由最小绿灯时间等参数决定。
(2) 最小绿灯时间gmin
直行相位最小绿灯时长应大于行人过街最短时间,可按式(27)计算[17]:
|
(27) |
另外,非机动车1次过街模式下,左转相位绿灯时间应大于非机动车过街时间,其计算式如下:

|
(28) |
(3) 饱和度α
交叉口饱和度α取值范围设定为(0.7~0.9)。理由是:当交叉口处于欠饱和状态(α < 0.7)时,通行能力远大于交通需求,交叉口运行通畅,进行信号配时优化的效果不明显;当交叉口处于过饱和状态(α>0.9)时,交叉口车流状态极不稳定,容易造成大面积阻塞,采用信号配时优化往往不能得到理想效果。
1.3 优化模型本研究信号配时优化模型如下:
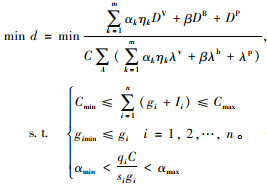
|
(29) |
上述配时优化模型是在给定约束条件下计算各相位绿灯时长,从而使整个交叉口的人均延误最小,而粒子群(Particle Swarm Optimization, PSO)算法正是一类非确定的全局最优型算法[18],鉴于其不依赖于问题本身数学性质,且具有良好的全局搜索能力和稳健性,本研究采用PSO算法对模型进行求解。PSO算法的粒子速度和位置更新公式为:

|
(30) |

|
(31) |
式中,vid(t),Xid(t)分别为第t代粒子第i个变量速度和位置的第d维,其中,vmin≤vid≤vmax,vmin、vmax为粒子速度最值;Pid(t)为第t代粒子第i个变量个体极值的第d维;Pgd为全局最优解的第d维;r1,r2是属于[0, 1]的随机数;c1,c2是加速常数,根据Huang,c1=c2=2时可以得到很好的收敛最优解。ω为惯性系数,为平衡算法的寻优能力,采用魏秀业等[20]的方法动态选择惯性系数对PSO算法进行改进,其调整公式为:
|
(32) |
式中,ωmax,ωmin分别为惯性系数最大值和最小值,此处分别取1.2和0.2;t为迭代次数,T为最大迭代次数。
2 案例分析 2.1 基础数据调查根据研究对象特点,选取成都市一环路与洗面桥街交叉口进行实例研究。该交叉口一环路方向交通量较大,洗面桥街左转车辆较多,晚高峰时期偶尔出现拥堵现象。交叉口渠化及信号相位示意图如图 3所示。

|
| 图 3 交叉口示意图 Fig. 3 Schematic diagram of intersection |
| |
根据实地交通调查及相关计算得到该路口工作日(2020年8月17日,星期一)晚高峰时段(17:00—18:30)的交通量情况如表 1所示。其中,机动车以小客车和大客车为主,其他类型车辆比例很小,此处暂不考虑;行人流量相对较小,且转向比例较为均衡,文中做等比例转向处理。经统计,该路口晚高峰时段小客车平均载客数为2.2,大客车平均载客数为13.3,非机动车平均载客数为1.1。
| 进口道 | 南 | 北 | 西 | 东 | |
| 左转/(veh·h-1) | 小客车 | 412 | 333 | 454 | 345 |
| 大客车 | 37 | 5 | 5 | 35 | |
| 非机动车 | 148 | 359 | 243 | 275 | |
| 直行/(veh·h-1) | 小客车 | 106 | 169 | 819 | 916 |
| 大客车 | 42 | 46 | 32 | 56 | |
| 非机动车 | 338 | 571 | 729 | 1 088 | |
| 右转/(veh·h-1) | 小客车 | 280 | 141 | 159 | 21 |
| 大客车 | 11 | 42 | 37 | 7 | |
| 非机动车 | 232 | 137 | 148 | 127 | |
| 行人/(人·h-1) | 190 | 465 | 232 | 433 | |
本研究交叉口各车道组饱和流率采用交叉口的实测数据。通过现场拍摄视频的方式记录交叉口的通行情况,并通过电脑软件逐帧处理,测算各车道组的饱和车头时距。饱和流率可用下式计算:

|
(33) |
式中h0为饱和车头时距。
剔除异常数据后,得各进口道不同流向饱和流率见表 2,各相位绿灯间隔时间均取5 s。由于该交叉口非机动车大部分采用2次过街模式,故表中左转非机动车饱和流率参照文献[21]确定。
| 进口道 | 机动车 | 非机动车 | |||
| 直行 | 左转 | 直行 | 左转 | ||
| 南进口 | 2 400 | 2 859 | 7 920 | 2 680 | |
| 北进口 | 3 360 | 2 985 | 7 200 | 2 680 | |
| 西进口 | 4 200 | 3 306 | 8 280 | 2 680 | |
| 东进口 | 3 900 | 2 400 | 9 000 | 2 680 | |
2.2 算法求解结果
使用软件MATLAB R2014b(8.4.0)进行编程,运用改进粒子群算法对信号配时优化模型进行求解,相关参数设置如下:最大迭代次数T设置为1 000,目标函数自变量为各相位绿灯时间,因此个数为4,粒子速度最值分别为-5和5,初始速度和位置通过随机化产生,粒子群规模M设置为50,算法达到最大迭代次数时终止。通过MATLAB求解得优化模型配时参数与传统webster法配时及现状配时参数对比见表 3。
| 周期C | g1 | g2 | g3 | g4 | |
| 优化配时(γ=1) | 124 | 19 | 24 | 37 | 24 |
| 优化配时(γ=0) | 124 | 19 | 24 | 37 | 24 |
| Webster法 | 184 | 19 | 41 | 63 | 41 |
| 实际配时 | 175 | 30 | 25 | 65 | 35 |
2.3 优化结果评价
将交叉口交通流数据及优化前后信号配时参数分别代入文中人均延误模型,计算交叉口的人均延误,并和Webster配时法进行对比,如表 4所示。从表 4中可以看出,本研究的信号配时模型的人均延误比Webster法和实际信号配时分别降低18.3,13.5 s,优化比例分别为30%,24%。从非机动车的不同过街模式来看,现有交通条件下,1次过街模式(γ=1)比2次过街模式(γ=0)人均延误低1.3 s,交叉口非机动车适宜设置1次过街模式。
| 配时方法 | 人均延误 |
| 优化配时(γ=1) | 42.17 |
| 优化配时(γ=0) | 43.47 |
| Webster法 | 60.51 |
| 实际配时 | 55.62 |
2.4 灵敏度分析
为进一步研究交叉口在不同流量条件下非机动车两种左转模式的适用性,保持行人流量不变,通过改变机动车和非机动车左转流量进行分析,不同左转流量下人均延误及相应的信号配时情况见表 5。
| 机动车/(pcu·h-1) | 非机动车/(veh·h-1) | ||||
| 100 | 200 | 300 | 400 | 500 | |
| 200(γ=1) | 33.7 | 33.8 | 33.8 | 33.9 | 41.6 |
| 200(γ=0) | 28.9 | 29.2 | 29.6 | 29.9 | 30.2 |
| 300(γ=1) | 34.7 | 34.8 | 34.8 | 34.9 | 42.3 |
| 300(γ=0) | 30.4 | 30.7 | 31.0 | 31.3 | 31.6 |
| 400(γ=1) | 37.8 | 37.8 | 37.8 | 37.8 | 44.3 |
| 400(γ=0) | 37.7 | 38.0 | 38.4 | 38.7 | 39.0 |
| 500(γ=1) | 51.1 | 51.0 | 50.9 | 50.8 | 52.6 |
| 500(γ=0) | 52.2 | 52.6 | 53.0 | 53.4 | 53.7 |
| 600(γ=1) | 79.6 | 79.3 | 78.9 | 78.6 | 78.3 |
| 600(γ=0) | 81.0 | 81.5 | 82.0 | 82.4 | 82.8 |
根据表 5可得不同左转流量下非机动车两种过街模式的人均延误变化情况如图 4所示。

|
| 图 4 不同左转流量下人均延误 Fig. 4 Delay per capita with different left-turn volumes |
| |
由图 4可知,当左转机动车流量大于400 pcu/h时,1次过街模式的人均延误低于2次过街模式,且二者延误的差值随左转流量的增大而增大;当左转机动车流量小于400 pcu/h时,1次过街模式的人均延误大于2次过街模式,且二者的差值随左转流量的减小而增大。当左转机动车流量为400 pcu/h,左转非机动车流量大于200 veh/h时,1次过街模式的延误小于2次过街模式,且二者的差值随着左转流量的增大而增大;但当左转非机动车流量增大到500辆/h时,1次过街模式的延误急剧增加,此时2次过街模式的延误更小。
结合前文分析,造成上述现象的原因是:当机动车左转流量大于400 pcu/h时,由于左转非机动车1次过街模式只有1次过街过程,其信号延误和绕行延误都比2次过街模式小。而当机动车左转流量小于400 pcu/h时,2次过街模式下交叉口可根据左转流量对左转绿灯时间进行同步调整,而1次过街模式由于左转非机动车最短过街时间限制,无法进一步减小绿灯时间,由此造成交叉口人均延误高于2次过街模式。另外,当左转机动车流量为400 pcu/h,左转非机动车流量增加到500 veh/h时,由于左转相位非机动车的饱和度约束,导致左转绿灯时间和信号周期变长,从而交叉口人均延误显著增加。
结合不同左转流量下的信号配时情况可进一步求得各关键相位饱和度。可以发现,当机动车左转流量较小时,南北向直行相位的饱和度偏低,绿灯时间未充分利用,如表 6所示。
| 左转流量/(pcu·h-1) | 1次过街 | 2次过街 |
| 200 | 0.46 | 0.38 |
| 300 | 0.46 | 0.38 |
| 400 | 0.47 | 0.45 |
结合交叉口几何参数分析,造成此现象的原因是,南北向直行行人过街距离较长,直行相位最短过街时间限制了信号配时的进一步优化。
3 结论本研究提出的基于人均延误的交叉口信号配时优化模型,综合考虑了交叉口所有交通参与者的通行效益;同时,以人均延误为优化指标消除了不同交通方式之间载客率的差异性。通过对交叉口非机动车不同过街模式分别建模优化,对比分析交叉口在不同交通条件下采用两种模式的运行效果,为同类型交叉口的交通组织与管控提供了依据。文中对2次过街模式下的非机动车和行人延误计算方法进行了修正,其科学性还需在实际应用中进行验证。
另外,笔者研究发现,交叉口非机动车和行人过街的最短绿灯时间对交叉口的信号配时优化效果有很大影响。1次过街模式下,根据式(27),左转非机动车过街时间与两条街道的宽度有关,未来可在本研究基础上进一步研究非机动车过街模式适用性和街道宽度之间的关系。根据式(26),行人最短绿时间和街道宽度直接相关,可通过增设交通岛,或利用中央驻足区设置行人多步穿越街道的组织方式,并配置相应信号灯,以此来缩短行人过街距离,减少行人过街时间。如南北向部分直行行人可利用东西向左转相位提前穿越一半街道到中央驻足区等待,并在南北向直行绿灯亮起时穿越后半段街道实现过街。
| [1] |
WEBSTER F, COBBER B. Traffic Signals Research Report[R]. London: Road Research Laboratory, 1996.
|
| [2] |
AKCELIK R. Traffic Signals: Capacity and Timing Analysis[R]. Sydney: Australia Road Research Board, 1981.
|
| [3] |
Transportation Research Board. Highway Capacity Manual[M]. Washington, D.C.: National Research Council, 2010.
|
| [4] |
张卫华, 陆化普, 石琴, 等. 公交优先的信号交叉口配时优化方法[J]. 交通运输工程学报, 2004, 4(3): 49-53. ZHANG Wei-hua, LU Hua-pu, SHI Qin, et al. Optimal Signal-planning Method of Intersections Based on Bus Priority[J]. Journal of Traffic and Transportation Engineering, 2004, 4(3): 49-53. |
| [5] |
JIA H, LIN Y, LUO Q, et al. Multi-objective Optimization of Urban Road Intersection Signal Timing Based on Particle Swarm Optimization Algorithm[J]. Advances in Mechanical Engineering, 2019, 11(4): 1687814019842498. |
| [6] |
刘畅, 魏丽英. 考虑人均延误和人均排放的信号配时优化模型[J]. 哈尔滨工业大学学报, 2018, 50(9): 83-88. LIU Chang, WEI Li-ying. Signal Timing Optimization Model Considering Per Capita Delay and Per Capita Emissions[J]. Journal of Harbin Institute of Technology, 2018, 50(9): 83-88. |
| [7] |
季彦婕, 邓卫, 王炜, 等. 基于公交优先通行的交叉口相位设计方法研究[J]. 公路交通科技, 2004, 21(12): 118-122. JI Yan-jie, DENG Wei, WANG Wei, et al. Study on the Design of Signal Phase Based on Bus Priority Intersections[J]. Journal of Highway and Transportation Research and Development, 2004, 21(12): 118-122. |
| [8] |
苏岳龙, 魏铮, 程思瀚, 等. 信号交叉口右转机动车与行人和非机动车冲突研究[J]. 公路交通科技, 2008, 25(12): 157-161, 166. SU Yue-long, WEI Zheng, CHENG Si-han, et al. Research of Conflict Between Right-turn Vehicles and Pedestrians or Bicyclists at Signalized Intersection[J]. Journal of Highway and Transportation Research and Development, 2008, 25(12): 157-161, 166. |
| [9] |
MA W, WAN L, YU C, et al. Multi-objective Optimization of Traffic Signals Based on Vehicle Trajectory Data at Isolated Intersections[J]. Transportation Research Part C: Emerging Technologies, 2020, 120: 102821. |
| [10] |
蒋海峰. 信号交叉口混合交通流干扰机理研究[D]. 北京: 北京交通大学, 2008. JIANG Hai-feng. Study on Interference Mechanism of Mixed Traffic Flow at Signalized Intersection[D]. Beijing: Beijing Jiaotong University, 2008. |
| [11] |
景春光, 王殿海. 典型交叉口混合交通冲突分析与处理方法[J]. 土木工程学报, 2004, 37(6): 97-100. JING Chun-guang, WANG Dian-hai. Analysis and Dealing Method to Conflict of Mixed Traffic at Typical Intersection[J]. China Civil Engineering Journal, 2004, 37(6): 97-100. |
| [12] |
陈小红, 钱大琳, 石冬花. 基于慢行交通的交叉口信号配时多目标优化模型[J]. 交通运输系统工程与信息, 2011, 11(2): 106-111. CHEN Xiao-hong, QIAN Da-lin, SHI Dong-hua. Multi-objective Optimization Method of Signal Timing for the Non-motorized Transport at Intersection[J]. Journal of Transportation Systems Engineering and Information Technology, 2011, 11(2): 106-111. |
| [13] |
王雪元. 典型信号控制交叉口行人和非机动车专用相位控制方法及效果[D]. 北京: 北京交通大学, 2018. WANG Xue-yuan. Control Method and Effect for Exclusive Phase of Pedestrian and Non-motor Vehicle on Typical Signalized Intersection[D]. Beijing: Beijing Jiaotong University, 2018. |
| [14] |
杨晓光, 杨静, 史玉茜. 信号控制交叉口左转非机动车过街模式适用性[J]. 城市交通, 2012, 10(4): 65-71, 18. YANG Xiao-guang, YANG Jing, SHI Yu-qian. Non-motorized Vehicle Left-turn Design at Signalized Intersections[J]. Urban Transport of China, 2012, 10(4): 65-71, 18. |
| [15] |
陈晓明, 邵春福, 姚智胜. 典型信号交叉口左转非机动车二次过街研究[J]. 土木工程学报, 2008, 41(7): 76-81. CHEN Xiao-ming, SHAO Chun-fu, YAO Zhi-sheng. A Study on Successive Crossings of Left-turn Bicycles at Typical Signalized Intersections[J]. China Civil Engineering Journal, 2008, 41(7): 76-81. |
| [16] |
赵亚杰. 基于混合交通的城市平面交叉口信号配时方法研究[D]. 南京: 东南大学, 2014. ZHAO Ya-jie. Research of Signal Timing Method for Urban Intersection Based on Mixed Traffic[D]. Nanjing: Southeast University, 2014. |
| [17] |
DGJ08-96—2013, 城市道路平面交叉口规划与设计规程[S]. DGJ08-96—2013, Design Specification for At-grade Intersections on Urban Street[S]. |
| [18] |
杨维, 李歧强. 粒子群优化算法综述[J]. 中国工程科学, 2004, 6(5): 87-94. YANG Wei, LI Qi-qiang. Survey on Particle Swarm Optimization Algorithm[J]. Engineering Science, 2004, 6(5): 87-94. |
| [19] |
HUANG V, SUGANTHA P, LIANG J J. Comprehensive Learning Particle Swarm Optimizer for Solving Multiobjective Optimization Problems[J]. International Journal of Intelligent Systems, 2006, 21(2): 209-226. |
| [20] |
魏秀业, 潘宏侠. 粒子群优化及智能故障诊断[M]. 北京: 国防工业出版社, 2010. WEI Xiu-ye, PAN Hong-xia. Particle Swarm Optimization and Intelligent Fault Diagnosis[M]. Beijing: National Defense Industry Press, 2010. |
| [21] |
齐张丽. 信号交叉口非机动车通行能力研究[D]. 南京: 东南大学, 2018. QI Zhang-li. Research on Signalized Intersection Capacity of Non-Motorized Vehicles[D]. Nanjing: Southeast University, 2014. |