 2019, Vol. 36
2019, Vol. 36扩展功能
文章信息
- 崔洪军, 朱敏清, 邢江柯, 宋长柏
- CUI Hong-jun, ZHU Min-qing, XING Jiang-ke, SONG Chang-bai
- 信号交叉口车路协同诱导策略下ACC车辆控制模式研究
- Study on ACC Vehicle Control Mode under Cooperative Vehicle Infrastructure Guidance Strategy for Signalized Intersection
- 公路交通科技, 2019, 36(6): 86-93
- Journal of Highway and Transportation Research and Denelopment, 2019, 36(6): 86-93
- 10.3969/j.issn.1002-0268.2019.06.012
-
文章历史
- 收稿日期: 2018-09-23


2. 河北工业大学 建筑与艺术学院, 天津 300401
2. School of Architecture & Art Design, Hebei University of Technology, Tianjin 300401, China
信号控制交叉口是城市道路交通网络中的重要组成部分,是实现各路段交通流转换的节点,由于受到信号灯的周期性干扰,车辆经常在信号交叉口区域频繁地启停和加减速,导致交叉口的通行效率下降,车辆延误、燃油消耗和污染物排放的提升[1-3]。近年来,无人驾驶技术的蓬勃发展,为提升车辆在信号交叉口的运行效率提供了新的契机。从技术发展路径来说,无人驾驶技术分为网联式驾驶辅助、自主式驾驶辅助,及前二者的融合[4]。目前,国内外学者利用网联式驾驶中的车路协同技术对车辆在信号交叉口的辅助驾驶做了一定的研究,这些研究通过车辆、信号灯和中心控制系统之间的实时通讯,利用速度诱导[3, 5]、轨迹诱导[2, 6-7]等方法提升了信号交叉口的通行效率,但是缺乏在信号交叉口区域和自主式驾驶技术相融合的相关研究。自适应巡航控制(Adaptive Cruise Control, ACC)是自主式驾驶技术中目前应用最广泛的一类重要的纵向跟驰技术。ACC车辆可以通过车载检测设备和传感器技术等实时获取自身与前车的行驶状态,并通过ACC控制系统做出比人类驾驶员更精确、稳定和安全的决策判断。在之前的研究中,国内外学者利用微观跟驰模型分别验证了ACC车辆在路段[8-9]和匝道[10-11]处对行车舒适性、燃油经济性、交通流通行效率和稳定性等方面的改善,但针对一些复杂的交通环境下,如存在车路协同环境下的交叉口的交通系统中[10],仍缺乏ACC车辆相关控制模式的研究。
基于此,本研究考虑了ACC车辆在信号交叉口车路协同诱导策略下的控制模式,利用诱导策略对控制模式进行了划分,在IDM模型的基础上建立了不同控制模式下的加速度算法,利用MATLAB对信号交叉口车路协同诱导策略下的ACC车辆的交通特性进行仿真模拟,并对信号交叉口的通行能力与节能减排进行分析。
1 车路协同环境下信号交叉口诱导系统的构建 1.1 系统架构车路协同环境下信号交叉口诱导系统主要由配有车载通信设备的ACC车辆、配有无线通信设备的信号灯和交通控制中心组成。ACC车辆在行驶过程中可以实时获取速度、加速度、与前车的车间距和速度差等信息,在进入车路协同控制范围后,通过车载通信设备将这些信息传递给交通控制中心;配有无线通信设备的信号灯可以将相位阶段、相位周期等信息传递给交通控制中心;交通控制中心根据采集到的信息制订诱导策略并传递给ACC车辆。
1.2 诱导策略车路协同环境下信号交叉口的车辆诱导策略是为了防止车辆在接近交叉口行驶时突然地加速和减速,并尽可能地减少车辆的停车次数,使车辆以合理的速度通过交叉口。如图 1所示,根据ACC车辆进入车路协同控制范围时信号灯所处的相位阶段和前方车辆的运行情况,按照诱导策略行驶后的ACC车辆可分为以下4种情况:

|
| 图 1 诱导策略示意图 Fig. 1 Schematic diagram of guidance strategy |
| |
(1) 正常通过
此种类型的ACC车辆进入车路协同控制范围D后,按照和路段上相同的控制模式行驶至交叉口停止线时,信号灯状态为绿灯,因此可以顺利通过交叉口。
(2) 提前加速通过
此种类型的ACC车辆进入车路协同控制范围D后,按照和路段上相同的控制模式行驶至交叉口停止线时,信号灯状态为红灯,但其可以通过提前加速以在绿灯末期通过交叉口,需要注意的是车辆在提前加速行驶至交叉口的过程中不应超过路段的限速vmax以及应考虑避免与前车的碰撞。
(3) 提前减速通过
此种类型的ACC车辆进入车路协同控制范围D后,按照和路段上相同的控制模式或提前加速行驶至交叉口停止线时,信号灯状态均为红灯,但其可以通过提前减速至vmin, 以在下一个绿灯期间通过交叉口,需要注意的是车辆在提前减速行驶至交叉口的过程中应考虑红灯期间交叉口的排队情况以避免与前车的碰撞。
(4) 提前减速停车
此种类型的ACC车辆进入车路协同控制范围后,按照上述的3种方式行驶至交叉口停止线时,信号灯状态均为红灯,在这种情况下,停车是不可避免的,因此ACC车辆应提前进行减速停在交叉口停止线前或前方排队车辆的尾部,避免在交叉口的急刹车,当信号灯变为绿灯时,排队停车的ACC车辆应快速启动驶离交叉口。
2 基于诱导策略的ACC车辆控制模式根据ACC车辆在不同诱导策略下的行驶工况信息,将ACC车辆的控制模式划分为正常跟驰模式、定速巡航模式、加速跟驰模式和启动模式。
2.1 不同控制模式下的加速度算法智能驾驶模型(Intelligent Driver Model, IDM)是目前应用广泛的ACC车辆的动力学模型,利用IDM模型模拟ACC车辆在高速公路或城市路段上的仿真结果已经得到了国内外学者的普遍认可[9, 12],因此,本文在IDM模型的基础之上,考虑诱导策略对ACC车辆驾驶行为的影响,进一步对模型进行扩展,构建ACC车辆在信号交叉口车路协同诱导策略下不同控制模式的加速度算法,IDM模型由自由加速方程af(t)和拥堵减速方程ai(t)两部分组成,具体如下:
|
(1) |

|
(2) |
式中,a(t)为t时刻ACC车辆的加速度;a为期望加速度;v(t)为t时刻ACC车辆的速度;ve为期望速度;δ为速度幂系数;s*(t)为t时刻ACC车辆与前车的期望车头间距;s(t)为t时刻ACC车辆与前车的车头间距;s0为最小停车间距;T为期望车头时距;Δv(t)为t时刻ACC车辆与前车的速度差;b为期望减速度。
2.1.1 正常跟驰模式车路协同诱导策略下处于正常跟驰模式的ACC车辆的控制模式应与其在路段上的控制模式保持一致,但由于受到信号灯周期性干扰,交叉口处的交通流经常发生拥堵流和自由流之间的转换。根据式(1),令a(t)和Δv(t)同时为0,可得IDM模型在平衡状态下的车头间距为s0+v(t)T/
因此,当ACC车辆处于正常跟驰模式时对应的加速度算法an(t)为IIDM模型,如式(3)所示:
|
(3) |
车路协同诱导策略下处于定速巡航模式下的ACC车辆应尽力保持或达到自身的期望速度。当v(t)=ve时,IDM模型的自由加速方程af(t)= 
(1) 模型产生的最大减速度不得超过期望减速度b;
(2) 速度幂系数δ应仍保持原来在模型的作用,即随着速度越来越接近期望速度,使得减速度的值也应越来越小;
(3) 自由加速度函数af(t)连续可微。
文献[13]等人给出了一个满足上述条件的当v(t)>ve时的加速度算法:

|
(4) |
综上,当ACC车辆处于定速巡航模式时,对应的加速度算法acr(t)为:
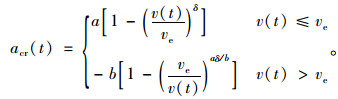
|
(5) |
车路协同诱导策略下处于加速跟驰模式的ACC车辆应尽快追赶上前车,并达到稳定的跟驰状态。根据ACC车辆车头间距s(t)与期望车头间距s*(t)的关系,对ACC车辆在加速跟驰模式下的运动状态进行如下划分:
(1) 当s(t)>s*(t)时,表明ACC车辆与前车间距有一定的差异,ACC车辆选择加速,跟上前方车辆。
(2) 当s(t)<s*(t)时,表明ACC车辆过于接近前车,处于不安全状态,必须进行一定的减速,防止发生碰撞。
(3) 当s(t)=s*(t)时,表明ACC车辆与前车处在正常的行驶范围内,保持稳定的跟驰状态。
因此,本文借鉴文献[14-15]利用IDM模型研究ACC车辆在城市道路行驶工况下的加速度算法的研究思路,对IDM模型进行改进,分别在af(t)和ai(t)的基础上,增加两个基于s(t)与s*(t)关系的加速度调整项,并通过使用阶跃函数Θ(x)来控制调整项产生作用。
加速跟驰模式下的afac(t)和aiac(t)分别如下所示:
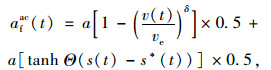
|
(6) |

|
(7) |
式中,afac中的a[tanh Θ(s(t)-s*(t))]确保ACC车辆在s(t)>s*(t)时,尽快加速以追赶前方车辆,同时为了防止在加速的过程中ACC车辆的加速度超过期望加速度a的情况,在
综上,当ACC车辆处于加速跟驰模式时,对应的加速度算法aac(t)为:
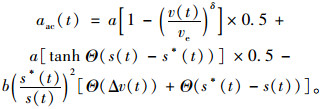
|
(8) |
车路协同诱导策略下处于启动模式下的ACC车辆在信号灯由红灯变为绿灯时,能够同时获得信号灯变为绿灯的信息,并会迅速做出反应,及时采取加速启动措施,而不仅仅考虑前方车辆对其的影响。当ACC车辆接受到信号灯变为绿灯的信息时,此时车辆应尽快加速达到期望速度,因此加速度方程可以由IDM模型中的自由加速方程af(t)表示;当ACC车辆受到前方车辆的影响下的加速度方程可以由2.1.1中的IIDM模型来表示。
因此,将af(t)与IIDM模型进行加权融合可以准确地描述车路协同诱导策略下ACC车辆在交叉口排队启动时的跟驰行为,本文借鉴文献[9]融合IDM模型和CAH (Constant Acceleration Heuristic)模型的研究思路,对IIDM模型和af(t)进行加权融合,并保证ACC车辆在启动模式下的加速度始终大于或者等于IIDM模型的加速度,最终得到的ACC车辆在启动模式下的加速度算法ast(t)如下:
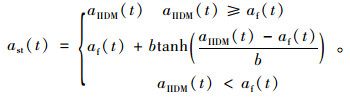
|
(9) |
根据2.1,基于车路协同诱导策略下的ACC车辆在不同控制模式下的加速度算法的控制参数与IDM模型保持一致,即ve,T,s0,a,b,δ。根据文献[9, 16],ACC车辆在行驶的过程中,可以通过改变部分控制参数的取值,有效地调整ACC车辆的驾驶特性与不同的行驶工况相适应,如通过减小b的取值,可以提前让ACC车辆在红灯期间进行制动。因此,本文参考文献[9, 16]的研究思路,在ACC车辆的不同控制模式下的加速度算法的基础上,引进λa,λT,λb共3个乘法因子,以实现在不同诱导策略下ACC车辆的控制参数的变化,即:

|
(10) |
式中,λai, λTi, λbi为不同诱导策略下的调整系数;ai, Ti, bi为不同诱导策略下调整后的控制参数。
2.3 不同控制模式的决策方法ACC车辆按照正常通过诱导策略通过交叉口,对应的控制模式可能为:头车采取以匀速为期望速度的定速巡航模式,非头车采取IIDM跟驰模式。若按照提前加速通过诱导策略通过交叉口,对应的控制模式可能为:头车采取以vmax为期望速度的定速巡航模式,非头车采取加速跟驰模式。若按照提前减速通过诱导策略通过交叉口,对应的控制模式可能为:头车先采取以vmin为期望速度的定速巡航模式驶向交叉口,当交叉口信号灯变为绿灯时,期望速度切换为v0;非头车先以vmin为期望速度的定速巡航模式驶向交叉口,当交叉口信号灯变为绿灯且前方车辆的速度大于vmin时,控制模式由定速巡航模式切换为启动模式。提前减速停车诱导策略对应的控制模式为IIDM模式。快速启动诱导策略对应的模式为启动模式。
当ACC车辆进入车路协同控制D后,协同控制中心计算ACC车辆在上述不同控制模式下的轨迹,为了尽量减少车辆在交叉口区域的加减速和停车次数,按照正常通过、提前加速通过、提前减速通过、提前减速停车的顺序,对ACC车辆的控制模式做出选择,并传递给ACC车辆,如图 2所示。

|
| 图 2 ACC车辆控制模式的决策方法 Fig. 2 Decision-making method of ACC vehicle control mode |
| |
3 仿真分析 3.1 仿真参数
为了验证上述车路协同诱导策略下的ACC车辆的控制模式的有效性和正确性,本研究利用MATLAB对其进行仿真模拟。设置路段行驶环境为单车道,车路协同控制范围D为300 m,提前加速通过诱导策略中vmax=16.66 m/s,提前减速通过诱导策略中vmin=6 m/s,信号灯周期时长为90 s,绿灯时长为40 s,车辆进入车路协同范围D的初速度相同v0=13.88 m/s。
传统ACC车辆在交叉口的控制模式和在路段上的控制模式相同,本研究为了增强传统ACC车辆和车路协同诱导策略下的ACC车辆仿真结果的对比性,选取IIDM模式为传统ACC车辆的控制模式。根据文献[9],被广泛采用的IDM模型在城市行驶工况下的参数取值为:a=1.5 m/s2,b=2 m/s2,ve=13.88 m/s,s0=3 m,T=1.2 s和δ=4。根据文献[17],关于车辆在行驶过程中可接受的加减速度的范围的研究,本文给出不同诱导策略下的ACC车辆控制参数的调整系数如表 1所示。
| 诱导策略 | λT | λa | λb |
| 保持正常通过 | 1 | 1 | 1 |
| 提前加速通过 | 0.8 | 1.5 | 1 |
| 提前减速通过 | 1 | 1 | 1.25 |
| 提前减速停车 | 1 | 1 | 0.5 |
| 快速启动 | 0.8 | 1.5 | 1 |
3.2 仿真结果分析 3.2.1 时空轨迹分析
通过MATLAB仿真模拟分别得到在交通流量为400,800 pcu/h和1 200 pch/h下的传统ACC车辆和车路协同诱导策略下的ACC车辆的时空轨迹图,如图 3所示。

|
| 图 3 传统ACC车辆和车路协同诱导策略下的ACC车辆在不同交通量下的时空轨迹 Fig. 3 Spatial-temporal trajectories of traditional ACC vehicle and ACC vehicles under cooperative vehicle infrastructure guidance strategy with different traffic volumes |
| |
通过图 3可以看出,在低车流密度(400 pcu/h)和中车流密度(800 pcu/h)下,车路协同诱导策略下的ACC车辆相比于传统ACC车辆,通过利用提前加速通过策略和提前减速通过策略减少了停车次数,提高了交叉口的通行效率;在高车流密度(1 200 pcu/h)下,由于车间距的限制,车路协同诱导策略下的ACC车辆无法通过提前加速或减速通过交叉口,但是其通过提前减速停车和快速启动的诱导策略,得到的轨迹曲线更加平缓。
3.2.2 效益分析通过比较传统ACC车辆和车路协同诱导策略下的ACC车辆在通过交叉口时的延误、燃油消耗和污染物排放,验证车路协同诱导策略下ACC车辆控制模式的有效性。延误由MATLAB仿真数据获得,燃油消耗和污染物排放根据VT-Micro[18]微观燃油消耗与污染物排放模型来计算,模型的表达式为:

|
(11) |
式中, MOEe为车辆的瞬时燃油消耗率或者尾气排放率;ki, je为燃油消耗率和不同排放物的回归系数,根据橡树岭国家实验室获得[18];

传统ACC车辆和车路协同诱导策略下的ACC车辆在不同交通流量下通过交叉口时的平均延误、平均燃油消耗和平均污染物排放如表 2所示。根据表 2计算得到车路协同策略下的ACC车辆相比于传统ACC车辆在不同交通流量下的改善效率如图 4所示。
| 交通流量/(pcu·h-1) | 驾驶环境 | 延误/s | 燃油消耗/(100 km)-1 | NOx排放/(mg·km-1) | CO排放/(mg·km-1) | HC排放/(mg·km-1) |
| 400 | 传统 | 18.053 | 11.685 | 90.192 | 643.074 | 106.284 |
| 车路协同 | 9.593 | 7.734 | 65.353 | 471.231 | 70.855 | |
| 800 | 传统 | 22.046 | 13.601 | 101.893 | 740.599 | 125.167 |
| 车路协同 | 17.726 | 11.917 | 95.055 | 662.844 | 110.099 | |
| 1 200 | 传统 | 23.480 | 14.291 | 106.282 | 774.134 | 132.174 |
| 车路协同 | 20.031 | 13.331 | 100.039 | 728.997 | 123.556 |

|
| 图 4 不同交通流量下的改善效率 Fig. 4 Improve efficiencies with different traffic volumes |
| |
根据表 2和图 4可以看出,车路协同诱导策略下的ACC车辆在通过信号控制交叉口时相比于传统ACC车辆在不同交通流量下的平均延误、平均燃油消耗、平均NOx排放、平均CO排放和平均HC排放都有一定程度的改善。其中在低车流密度(400 pcu/h)和中车流密度(800 pcu/h)的情况下,车路协同诱导策略下的ACC车辆可以通过提前加减速通过交叉口,避免了在交叉口的停车,因此改善效率更好;在高车流密度(1 200 pcu/h)的情况下,由于车间距的限制,车路协同诱导策略下的ACC车辆无法通过提前加减速不停车通过交叉口,但其通过提前减速停车和快速启动的诱导策略,分别降低了14.69%的延误、6.72%的燃油消耗、4.89%的NOx排放、5.83%的CO排放和6.52%的HC排放。
4 结论(1) 根据ACC车辆在信号控制交叉口车路协同诱导策略下的行驶工况信息,考虑诱导策略对ACC车辆驾驶行为的影响,将诱导策略下的ACC车辆的控制模式分为正常跟驰模式、定速巡航模式、加速跟驰模式和启动模式4种,在原ACC车辆控制模式IDM模型的基础上做出改进,构建了诱导策略下ACC车辆在不同控制模式下的加速度算法。
(2) 仿真结果表明,诱导策略下的ACC车辆在不同等级的车流密度下相比于传统ACC车辆在通过交叉口时的延误、燃油消耗和污染物排放等方面都有不同程度的改善,能够提高交叉口的通行效率和节能减排。
(3) 目前,关于网联式辅助驾驶技术和自主式辅助驾驶技术的研究都在蓬勃地发展。本文的研究能够给未来汽车厂商在研发ACC车辆在车路协同诱导策略下的控制模式提供研发思路,以及对车路协同技术和ACC技术在城市交通规划与管理中的应用推广起到积极作用。
(4) 本研究只考虑了ACC车辆在单个交叉口诱导策略下的控制模式,同时对个体ACC车辆的诱导策略可能并非系统最优,在今后的研究中,应从多个交叉口以及系统最优的角度进一步对ACC车辆在诱导策略下的控制模式进行研究。
| [1] |
李素兰, 张谢东, 施俊庆, 等. 信号控制交叉口交通流建模与通行能力分析[J]. 公路交通科技, 2017, 34(12): 108-114. LI Su-lan, ZHANG Xie-dong, SHI Jun-qing, et al. Traffic Flow Modeling and Capacity Analysis of Signalized Intersection[J]. Journal of Highway and Transportation Research and Developmet, 2017, 34(12): 108-114. |
| [2] |
安实, 姚焓东, 姜慧夫, 等. 信号交叉口绿色驾驶车速控制方法[J]. 交通运输系统工程与信息, 2015, 15(5): 53-59. AN Shi, YAO Han-dong, JIANG Hui-fu, et al. A Green Driving Speed Control Method at Signal Intersection[J]. Jorunal of Transportation Systems Engineering and Information Tecehnology, 2015, 15(5): 53-59. |
| [3] |
UBIERGO G A, JIN W L. Mobility and Environment Improvement of Signalized Networks Through Vehicle-to-Infrastructure (V2I) Communications[J]. Transportation Research Part C:Emerging Technologies, 2016, 68: 70-82. |
| [4] |
李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. LI Ke-qiang, DAI Yi-fan, LI Sheng-bo, et al. State-of-the-art and Technical Trends of Intelligent and Connected Vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14. |
| [5] |
鹿应荣, 许晓彤, 丁川, 等. 车联网环境下信号交叉口车速控制策略[J]. 交通运输系统工程与信息, 2018, 18(1): 50-58. LU Ying-rong, XU Xiao-tong, DING Chuan, et al. A Speed Control Strategy at Signalized Intersection under Connected Vehicle Environment[J]. Jorunal of Transportation Systems Engineering and Information Tecehnology, 2018, 18(1): 50-58. |
| [6] |
RAKHA H, KAMALANATHSHARMA R K. Eco-driving at Signalized Intersections Using V2I Communication[C]//International IEEE Conference on Intelligent Transportation Systems. Washington, D.C., USA: IEEE, 2011: 341-346.
|
| [7] |
姚佼, 杨晓光, 杨晓芳, 等. 基于车载数据的交叉口车辆行为辨识[J]. 公路交通科技, 2012, 29(6): 127-132. YAO Jiao, YANG Xiao-guang, YANG Xiao-fang, et al. Probe Data-based Identification of Vehicle Behaviors at Intersection[J]. Journal of Highway and Transportation Research and Developmet, 2012, 29(6): 127-132. |
| [8] |
秦严严, 王昊, 王炜, 等. 混有CACC车辆和ACC车辆的异质交通流基本图模型[J]. 中国公路学报, 2017, 30(10): 127-136. QIN Yan-yan, WANG Hao, WANG Wei, et al. Fundamental Diagram Model of Heterogeneous Traffic Flow Mixed with Cooperative Adaptive Cruise Control Vehicles and Adaptive Cruise Control Vehicles[J]. China Journal of Highway and Transport, 2017, 30(10): 127-136. |
| [9] |
KESTING A, TREIBER M, HELBING D. Enhanced Intelligent Driver Model to Access The Impact of Driving Strategies on Traffic Capacity[J]. Philosophical Transactions of the Royal Society A:Mathematical, Physical and Engineering Sciences, 2010, 368(1928): 4585-4605. |
| [10] |
华雪东, 王炜, 王昊. 考虑自适应巡航车辆影响的上匝道系统混合交通流模型[J]. 物理学报, 2016, 65(8): 219-231. HUA Xue-dong, WANG Wei, WANG Hao. A Hybrid Traffic Flow Model with Considering the Influence of Adaptive Cruise Control Vehicles and On-ramps[J]. Acta Physica Sinica, 2016, 65(8): 219-231. |
| [11] |
DAVIS L C. Effect of Adaptive Cruise Control Systems on Mixed Traffic Flow Near an On-ramp[J]. Physica A:Statistical Mechanics and Its Applications, 2007, 379(1): 274-290. |
| [12] |
秦严严, 王昊, 王炜, 等. 自适应巡航控制车辆跟驰模型综述[J]. 交通运输工程学报, 2017, 17(3): 121-130. QIN Yan-yan, WANG Hao, WANG Wei, et al. Review of Car-following Models of Adaptive Cruise Control[J]. Journal of Traffic and Transportation Engineering, 2017, 17(3): 121-130. |
| [13] |
TREIBER M, KESTING A, THIEMANN C. Traffic Flow Dynamics:Data, Models and Simulation[M]. New York: Springer, 2013.
|
| [14] |
SHEN J, JIN X. Detailed Traffic Animation for Urban Road Networks[J]. Graphical Models, 2012, 74(5): 265-282. |
| [15] |
陆涛, 刘箴, 刘婷婷, 等. 基于跟驰模型的车辆虚拟仿真方法[J]. 计算机工程, 2016, 42(6): 305-309. LU Tao, LIU Zhen, LIU Ting-ting, et al. Virtual Vehicle Simulation Method Based on Car-following Model[J]. Computer Engineering, 2016, 42(6): 305-309. |
| [16] |
李烨, 王炜, 邢璐, 等. 自动巡航与可变限速协同控制对高速公路基本路段通行效率的改善[J]. 吉林大学学报:工学版, 2017, 47(5): 1420-1425. LI Ye, WANG Wei, XING Lu, et al. Improving Traffic Efficiency of Highway by Integration of Adaptive Cruise Control and Variable Speed Limit Control[J]. Jorunal of Jilin University:Engineering and Technology Edition, 2017, 47(5): 1420-1425. |
| [17] |
YI K, CHUNG J. Nonlinear Brake Control for Vehicle CW/CA Systems[J]. IEEE/ASME Transactions on Mechatronics, 2002, 6(1): 17-25. |
| [18] |
AHN K, RAKHA H, TRANI A, et al. Estimating Vehicle Fuel Consumption and Emissions Based on Instantaneous Speed and Acceleration Levels[J]. Journal of Transportation Engineering, 2002, 128(2): 182-190. |