 2016, Vol. 33
2016, Vol. 33
CPS(Cyber-Physical Systems)系统是融合了控制、计算、通信等多学科领域技术的复杂混合系统,它的目标是借助嵌入式自带的高速计算能力以及设备所接入的通信网络实时对当前物理环境进行信息采集、处理,并通过反馈机制交付给控制中心[1].控制中心反过来下达控制命令来应对物理环境的变化.具备实时、高效、全天候等特点,CPS系统的广泛应用必将改善各个生产领域的低效率现状,进而提高整个人类社会的生活质量[2-3].
1 CPS定义与基本组件 1.1 CPS相关概念目前关于CPS的定义还存在很多不同的看法, 较具有代表性的是由Edward Lee提出的:CPS是一系列计算进程和物理组件的统一体, 通过计算组件来监控物理实体的运行状况, 而物理实体又借助于网络与计算组件来实现对环境的感知、控制与反馈[4].
从微观角度,CPS借助嵌入式技术使得原本孤立的物理设备具备计算和通信能力,计算过程负责接受物理进程的反馈,并及时与所在的自组通讯网络进行交互,反馈机制的融入保证了计算过程在整个监测过程中做到实时、高效地控制与反馈.从宏观的角度,CPS贯穿了时间和空间两个不同领域,在这个过程中整合了不同资源,合理、有序地控制不同资源之间的协作、交互等.这一切的实现有赖于计算过程、控制以及通信之间的密切配合,相互协作,最终才有了具备实时感知、精确控制的CPS系统.
1.2 CPS基本组件CPS由决策控制单元(Decision-making Control Unit)、传感器(Sensor)和执行器(Actuator)3种基本组件组成.决策控制单元负责逻辑控制,前提是它必须在接收到语义之后能够解析生成符合相应语义规则的控制逻辑;传感器则负责对真实世界的物理条件进行监测、取样、分析,作为决策控制单元的输入;执行器则是最后一个环节,它负责接收传感器输入的经过控制单元分析后的指令,根据指令完成指定动作形成一个闭合的反馈环.CPS反馈循环机制如图 1所示:用户规则是整个循环机制的前提;传感器和执行器承担了连接物理和计算两个世界的角色,控制单元的输出作为执行器的输入,执行器操纵的结果将会直接改变物理对象和环境[4-5].

|
图 1 CPS的反馈环 Figure 1 CPS Feedback Loop |
未来,CPS系统主要的3大应用领域分别是:分布式能源系统、未来交通和物流系统以及未来的卫生医疗保健系统[6].这些应用都需要传感、计算、物理设备控制和处理过程等方面的无缝集成和相互协作.要构建CPS系统不是一件很容易的事,需要一种全新的突破性理论能够在统一的框架内对信息和物理资源进行建模.这非常有挑战,因为长期以来计算机科学和控制理论都是在基于各学科自身的理论基础前提下独立于彼此进行演化发展的.许多对于物理系统非常重要的关键性要求(例如,不确定性、不准确性等)在计算机科学研究领域里很少被重视和处理.同样,计算的复杂性、系统升级以及软件故障等在物理控制理论那里也往往被忽视,往往把计算处理过程视为一个精确的、准确无误、静态的“黑盒子”.因此,CPS系统方案的实现必须首先突破信息和物理世界的界限[7-9]:通过一个统一的基础架构允许集成模型解决两个不同世界的同步性问题.CPS系统常见的问题就是实时监控、控制和管理不同的行为活动.关于这些常见问题,需要解决或者说考虑以下工作,具体为
(1) 提出一种合适的结构框架;
(2) 一种基于事件的模型提出[10];
(3) 一种基于服务质量的模型提出[11];
(4) 一种基于语义的模型[12];
(5) 对大数据的高效率处理.
本文的侧重点是CPS系统如何连接虚拟和物理两个世界,提出了语义架构模型;结合语义模型方案在分析系统需要解决的语义问题时分别给出相应的思路加以阐述,为进一步解决CPS系统语义模型问题提供了参考.
2 CPS系统架构与语义模型 2.1 CPS的系统架构CPS要实现的目标是:通过大量地理位置彼此隔离的分布式设备将物理过程、周围环境和信息网络系统紧密耦合起来.网络化的信息系统的发展,使得CPS可以整合计算、人类活动,并通过信息和通信技术做出智能化决策.重要的是,这些计算、人类活动和智能决策最终是为了监测、控制和收集物理过程和环境信息,以便对物理世界做出合理的判断和反馈.这类信息系统的规模小至微型的嵌入式系统,大至大规模的系统集群.设备提供了连接信息世界和物理世界的接口.NSF峰会上关于CPS系统解决方案所做出的讨论可以归结为自然与科学领域的11个挑战.这11个挑战是构建CPS系统首先且必须解决的问题,具体为:(1) 组合;(2) 分布式感知、计算和控制;(3) 物理接口和集成;(4) 人机交互和集成;(5) 信息,从数据到知识;(6) 建模与分析;(7) 隐私与安全性;(8) 鲁棒性、自适应和重构性;(9) 软件;(10) 鉴定、测试和认证;(11) 社会影响.除了上述这些,还遗漏了一个至关重要的问题亟待解决,那就是语义:一种可以描述连接真实物理世界和虚拟世界的特殊语义规范.
前面已经提到,为了解决信息协议、基于判断的QoS(Quality of Service)体系等问题,本文引入了比物联网概念更大的框架——物维网WoT(Web-of-Things)[7].本文认为,在运用物联网等技术应对构建CPS系统中的挑战之前,本文应该先做好充足的准备工作,例如这里提到的WoT框架.
WoT框架的构成模块是表述性的状态转移,Representational State Transfer表述性的状态转移简称REST,这是一种特殊的架构风格[8].实际上,它是在Web和HTTP协议[13]基础上进行细化和特定约束后得来的,已成为迄今为止全世界最成功的大规模分布式应用的架构解决方案.REST风格的支持者们认为现行的基于Web Service的RPC(Remote Procedure Call)架构实质上不是面向互联网的,相反,它仅仅只是RPC架构的一个网络版本,更适合封闭的局域网,一旦发布到公共互联网时就会暴露很多潜在的漏洞,尤其是当考虑到大规模、灵活性、性能、可实施性[14]等方面时将显得更加突出.基于原始的客户端-服务器模式[8]构建起来的REST对现有的web服务体系结构元素做了进一步的限制,目的是为了:
(1) 简化服务请求者与提供者之间的交互和集成;
(2) 尽可能利用现有的WWW(万维网)架构.
针对CPS系统的WoT框架组成如图 2所示,主要由5层构成,包括:WoT物理设备层,WoT内核,WoT协议层,WoT语义规范以及WoT应用程序接口.除了WoT架构,还有信息物理融合的接口(如传感器、执行器、摄像头等等),它们负责与周围的物理环境交互.WoT架构使得信息世界可以观察、分析、理解后控制物理世界并利用相关数据去执行有目标导向的实时任务.以下是WoT架构的组成介绍.

|
图 2 CPS系统的WoT框架 Figure 2 WoT Framework for CPS |
(1) WoT物理设备层:主要构成CPS系统的信息和物理交互接口.是对各种不同设备的统一管理抽象.是根据REST协议标准对设备语义规范的描述.
(2) WoT内核:该层主要提供底层通信、调度以及资源管理的运行情况.内核层负责识别事件并分配所需资源,例如,带宽、处理来自物理设备层大量数据所需的处理器资源以及存储空间.
(3) WoT协议层:该层是在现有互联网基础架构之上以应用为导向对网络识别的一个逻辑抽象.它将管理多变的网络行为,例如延迟、数据丢失,通过允许节点自主选择更合适路径以及可预测的高性能手段来解决抖动和带宽问题.
(4) WoT语义层:该层提供WoT架构对上一层捕获事件的语义描述,同时还负责做出决定以及控制CPS应用系统的行为.
(5) WoT应用接口层:该层提供了开发人员与WoT框架进行交互的接口规范.
在图 2中的WoT框架基础之上得到的CPS系统参考架构如图 3所示.这个参考架构目的在于从更高的角度对CPS进行抽象并将WoT纳入到CPS中来.

|
图 3 CPS系统架构参考模型 Figure 3 CPS Reference Architecture |
CPS系统的关键是对是传感器和事件的语义描述.对事件语义的描述必须符合分布式实时CPS系统的规范.不仅如此,事件还是CPS系统的初始化关键活动之一.事件不仅以接口和可观察行为的方式对开放系统中组件提供了明确的定义.同时,事件还有助于定义组件之间的协同和耦合关系[15-16].事件的变化范围从较低层的物理信号到到高级的抽象事件,然而CPS应用和用户们往往只对物理世界中特定条件下的事件感兴趣,而且预先已经定义了针对这些特定条件事件的响应,由CPS系统负责执行.系统一旦检测到这类特定条件的事件,就会触发相应的预定义响应.从这个角度来说,任何一个CPS系统都可以看成是一种基于“事件-响应”关系[17]的模型.对于动态实时CPS系统中的语义表述存在以下挑战.
2.2.1 传感器抽象和事件表述传感器获取到的数据需要经过处理之后才能得到用于识别事件和语义分析的有用信息.传感器和事件的实体抽象分别代表传感器和事件本身.然而要做到这一点也是有难度的,需要有一个框架统筹地解决这个问题.传感器可以视为一种具有唯一标识的资源,这种标识有助于传感器在网络上的定位.除此之外,很重要的一点是研究传感器类的概念,它是指具有特殊属性的传感器实体的集合.例如:温度传感模拟和警报类,就是由许多个不同传感器实体组成的.考虑到移动性,这个传感器类还应该具有位置和时间两个属性.以此类推,事件类是指具有特殊属性的事件的集合.同样,事件类也应具有位置、时间两个属性(或者至少具有一个按时间有序排列的位置属性).这两个类之间具有某种关系,而且这种关系应兼具泛化/明细、组合和协同等特点.正如前面所提到的,互操作性是实现不同高级别应用间无缝集成的关键.只有完成这一步才可顺利应对以下挑战:
(1) 管理和维护不同来源以及导出的原始传感数据;
(2) 解析和特定传感器配置及输出有关的事件;
(3) 将传感器获取的系统信息转换后交付给高层管理应用;
(4) 在保证语义抽象级别相同的前提下依据标准化接口升级现有传感器.
2.2.2 组合传感器和事件解决复杂需求根据应用的特定需求,可能需要对来自不同传感器的事件数据进行组合.这也是一个艰难的任务, 因为它需要一个明确的框架专门负责不同来源的传感信息是如何组合、相互关联并最终达到特定应用场景的质量安全要求.
将复杂的功能进行分解,分解之后的模块各自被对应传感器和事件匹配并响应的技术,称为分解技术.这种分解技术需要考虑模块集成以及任务执行和调度时的动态序列等规范.服务方面可以使用工作流对动力学建模,具体而言可以选择BPEL语言等;资源方面,采用混搭技术可以非常灵活地配置这些工作流.
2.2.3 传感器和事件组合的语义语义对于自主传感搜索、选择和组合来说是必不可少的.这里的语义是指对事情和事件的含义的分析和研究.与用于编码或描述的规则不同,语义表示的是元素含义的定义[16].语义描述的是句法元素和计算模型之间的关系.同时,它还用来定义实体在系统中所扮演的角色.这其中包括功能或者系统的某些显而易见的特征.
有两种方法可用来描述语义,它们分别是:
(1) 本体和;
(2) 轻量级语义标准.
本体和是对共享语义概念的一种正式、明确的表述,这些表述通常是机器容易理解的,对协商一致认识的模型抽象,在本体和的基础上,借助唯一标识概念的规范、动态和静态属性可以实现概念的定义.概念的具体内容以及内在联系通常被定义为一种本体规范.本体组合物通常由许多相互关联的本体伪影组成,这些伪影则是以迭代分层和分级的方式构建的.从这个角度来讲,很有必要从更高的抽象层面得出本体的视图化表述,这样做的目的是为了方便该领域的专家捕获定义本体的语义丰富性,并进一步理解和对模型做出评价.
本体可以用来定义以下系统属性.
(1) 信息和通讯:主要指在相关成员之间收集和交换信息的基本能力.
(2) 可积性:指的是传感器和不同来源设备间无缝集成,以及如何以最快捷的方式集成这些传感器以形成最终解决方案的能力.
(3) 协调性:负责成员执行任务的调度和规划.
(4) 意识与合作:对正在执行的操作过程以及系统状态隐式的感知.
就表述对特定领域的基本认知而言,本体以及单独给资源添加语义注解的方式已经足够了.这里的一个特殊挑战是开发本体事件.轻量级语义RDF元数据注释方法为解决CPS系统语义提供了不错的选择.资源描述框架(RDF)提供一种增强的基于XML的表示方法,包括:
(1) 三维组合(资源、属性、值)或(主题、判定、对象).
(2) 关系的定义是可扩展的,如类与子类资源概念描述之间的关系,这就意味着关系定义的描述可以通过不断新增描述信息而得到丰富.资源描述框架(RDF)是一种元数据,可以插到XML代码文件中或设备中,反之亦然.图 4是传感器扩展表述的例子,图 5则是统一资源位置(URL)层次结构示例.

|
图 4 传感器实体的可扩展RDF描述 Figure 4 Extensible RDF representation of a sensor instance |

|
图 5 URL层次结构 Figure 5 URL Hierarchy |
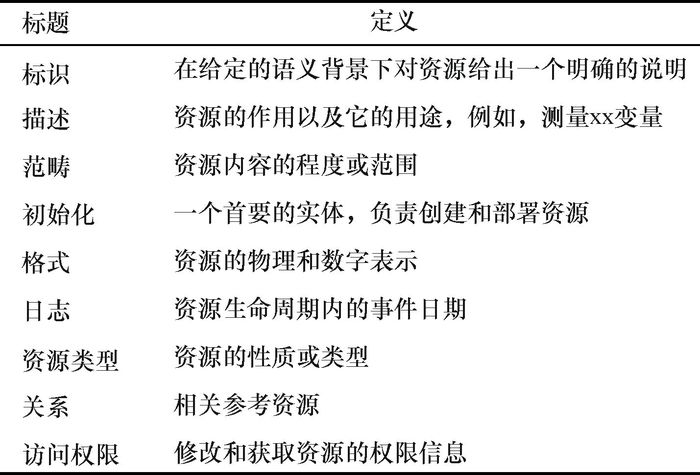
另一个重要的方面是RDF配置文件的使用(如表 1所示).CPS系统的语义必须能够代表:时间需求、资源描述(例如硬件或软件应用程序)、服务质量、任务调度.当然,其功能问题也必须解决.如此一来,可以将语义划分为4大主要组成部分,分别是:时间,提供关于时间的详细定义;资源,为资源描述提供广泛的区间、物理资源,例如设备、CPU或通讯设备等;服务质量(QoS),现阶段已经提供了有关服务质量(QoS)概念说明的配置文件,用于资源实例描述;因果性,指行动执行和资源服务实例的描述.
| 表 1 资源描述文件(RDF)的实例 Table 1 Sample RDF Profile |
有关文献提到了CPS系统的事件模型方案.这些方案基本上将事件划分为时间和空间[17].有的则进一步定义了不同维度,如:实时的或间断的;单个的或流的;行为或观察;点或区域;因果的、离散的、连续的[17].
在一个CPS系统内,事件还可进一步划分如下[18].
(1) 物理事件:物理事件是以物理世界中终端事件的发生为模型,很可能是一个到多个物理对象或物理现象在属性、时间或者空间上的一点点变化.这些事件是通过物理观察捕获的,它们是对所期望的物理事件在属性、时间和空间上做的剪影.
(2) 信息物理事件:传感器捕获的物理事件结合其他传感器的传感物理实例作为观察输入,最后生成符合信息物理事件特征的信息物理事件实例.
(3) 信息事件:CPS事件模型中处于最顶层的CPS控制单元充当最高级别的观察者,它可以将信息物理事件实例和其他CPS组件(如传感器)以及控制单元结合起来作为观察输入,并生成信息事件.
3 结论本文首先介绍了CPS系统的相关概念、定义以及系统的相应特点,侧重CPS系统在连接物理和虚拟信息世界时的语义规范,提出了语义模型,引入了WoT(Web-of-Things)——物维网的概念,给出了相应架构模型,并结合该模型分析了CPS系统语义的分层结构.CPS系统需要解决在一个语义模型范畴内定义虚拟世界和物理世界中对象以及事件的语义,本文只是做了一些工作和分析,为进一步解决两个不同世界同步问题做了一些尝试以供参考.CPS系统是个庞大复杂的系统,涉及到多学科、多领域的知识和研究成果,还有很多需要研究的地方,将云计算的优势和CPS结合将是大势所趋,相信它们的结合将会更好地为人类服务,带领人类社会迈入一个崭新的智能时代.
| [1] |
温景容, 武穆清, 宿景芳, 等. 信息物理融合系统[J].
自动化学报, 2012, 38(4): 507-517.
WEN J R, WU M Q, SU J F, et al. Cyber-physical systems[J]. Acta Automatica Sinica, 2012, 38(4): 507-517. |
| [2] |
何积丰. 信息物理融合系统[J].
中国计算机学会通讯, 2010, 6(1): 25-29.
HE J F. Cyber-physical systems[J]. Communications of the China Computer Federation, 2010, 6(1): 25-29. |
| [3] |
王小乐, 陈丽娜, 黄宏斌, 等. 一种面向服务的CPS体系框架[J].
计算机研究与发展, 2010, 47(S2): 299-303.
WANG X L, CHEN L N, HUANG H B, et al. A service-oriented architecture framework of cyber-physical systems[J]. Journal of Computer Research and Development, 2010, 47(S2): 299-303. |
| [4] | 朱晨曦. 基于AADL的信息物理融合系统的分析与设计方法[D]. 广州: 广东工业大学计算机学院, 2014. |
| [5] |
徐文拴, 辛运帷, 卢桂章, 等. 普适计算系统架构的研究[J].
计算机科学, 2009, 36(4): 246-249.
XU W S, XIN Y W, LU G Z, et al. Research on the system architecture for pervasive computing[J]. Computer Science, 2009, 36(4): 246-249. |
| [6] |
王中杰, 谢璐璐. 信息物理融合系统研究[J].
自动化学报, 2011, 37(10): 1158-1166.
WANG Z J, XIE L L. Cyber-physical systems: A survey[J]. Acta Automatica Sinica, 2011, 37(10): 1158-1166. |
| [7] |
任丰原, 黄海宁, 林闯, 等. 无线传感器网络[J].
软件学报, 2003, 14(7): 1282-1291.
REN F Y, HUANG H N, LIN C, et al. Wireless sensor networks[J]. Journal of Software, 2003, 14(7): 1282-1291. |
| [8] |
康健, 左宪章, 唐力伟, 等. 无线传感器网络数据融合技术[J].
计算机科学, 2010, 37(4): 31-35.
KANG J, ZUO X Z, TANG L W, et al. Wireless sensor network data fusion technology[J]. Computer Science, 2010, 37(4): 31-35. |
| [9] |
曾龙海, 张博锋, 张丽华, 等. 基于云计算平台的虚拟集群构建技术研究[J].
微电子学与计算机, 2010, 27(8): 31-35,40.
ZENG H L, ZHANG B F, ZHANG L H, et al. Virtual cluster constructing based on cloud computing platform[J]. Microelectronics & Computer, 2010, 27(8): 31-35,40. |
| [10] | DHATT G, TOUZOT G. Finite element method[M]. NewYork: John Wiley & Sons, 2012. |
| [11] | TINNEY W F, WALKER J W. Direct solutions of sparse network equations by optimally ordered triangular factorization[J]. Proceedings of the IEEE, 1967, 55(1): 1801-1809. |
| [12] | SCHMITT J, FFITSCH M, GATTERMANN J, et al.Numerical investigations to the influence of rearrangement of ground pressure for shield tunneling[C]//Proc ICOSSAR 2005.Rotterdam:Mill Press, 2005:1317-1323. |
| [13] |
刘辉, 麻志毅, 邵维忠, 等. 模型转换中特性保持的描述与验证[J].
软件学报, 2007, 18(10): 2369-2379.
LIU H, MA Z Y, SHAO W Z, et al. Description and proof of property preservation of model transformations[J]. Journal of Software, 2007, 18(10): 2369-2379. |
| [14] | VANDERPERREN Y, DEHAENE W.From UML/SysML to Matlab/Simulink:current state and future perspectives[C]// Proceedings of the conference on Design, automation and test in Europe.European:Design and Automation Association, 2006:93-93. |
| [15] | TAMURA M, KAMIYAMA T, SOEDA T, et al.A model transformation environment for embedded control software design with simulink models and UML models[C]// Proceedings of the International MultiConference of Engineers and Computer Scientists.[S.l.:s.n.], 2012:345-354. |
| [16] | 盛秋戬. 语义Web中的资源管理与主体技术研究[D]. 北京: 中国科学院计算技术研究所, 2004. |
| [17] | PALACHI E, COHEN C, TAKASHI S, et al. Simulation of cyber physical models using SysML and numerical solvers[C]//Systems Conference(SysCon)2013 IEEE International.Beijing:ISCAS, 2013:671-675. |
| [18] |
赵天慧, 张立臣. 一种分布式实时系统的资源管理体系结构[J].
广东工业大学学报, 2008, 25(1): 50-53.
ZHAO T H, ZHANG L C. A distributed real-time systems of resource management Architecture[J]. Journal of Guangdong University of Technology, 2008, 25(1): 50-53. |