

2. 武汉大学 地球空间环境与大地测量教育部重点实验室,湖北 武汉 430079;
3. 武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉 430079
2. Key Laboratory of Geospace Environment and Geodesy, Ministry of Education, Wuhan University, Wuhan 430079, China;
3. State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing,Wuhan University, Wuhan 430079, China.
卡尔曼线性滤波模型的最优估计是建立在函数模型确定以及噪声特性已知的基础上,而在实际应用中,噪声特性一般是未知的,如何确定噪声协方差矩阵则是应用卡尔曼滤波模型的一个难题,自适应卡尔曼滤波则是解决这一问题的主要方法[1, 2, 3, 4, 5]。
迄今为止,国内外学者围绕自适应卡尔曼滤波展开了丰富的研究。目前有4类主要的自适应卡尔曼滤波算法,包括贝叶斯法、极大似然法、相关法和协方差匹配法。其中,贝叶斯法和极大似然法均通过构造与新息相关的极大似然函数进行噪声协方差估计,文献[6—7]基于梯度的数值计算方法并采用EM算法,亦可用于不规则采样数据的噪声协方差估计,但需使用全部数据进行多次迭代,计算过程相对比较复杂,计算效率低下。协方差匹配法在数据滤波的同时,利用预测状态残差和观测状态残差实时的估计和修正状态噪声和观测噪声协方差矩阵,此类方法因为计算简单,且具有实时性,被广泛地应用于动态大地测量的相关数据处理过程中[8, 9, 10, 11],其局限性在于它难以保证噪声协方差矩阵的正定性,且估计结果是有偏的。文献[12—14]中提到的相关法通过计算观测数据的相关函数序列,推算出稳态的滤波增益,进而对噪声协方差阵进行估计,此类算法应用最为广泛。同时需要指出的是以上4类方法进行噪声协方差估计时均采用分步计算。
文献[15, 16, 17]提出的自协方差最小二乘估计(autocovariance least squares,ALS)算法,是基于相关法的思想,通过构造基于新息的线性滤波模型,建立噪声协方差矩阵与相关函数序列的函数模型,并采用最小二乘估计方法同时计算状态噪声协方差和观测噪声协方差,估计精度得到显著提高。文献[18]在此基础上提出广义ALS,将其拓展到状态噪声和观测噪声相关的系统。但这两种方法均只适用于白噪声的系统,而实际数据处理中的噪声往往存在一定的相关性,而非简单的白噪声。基于上述情况,本文提出一种有色噪声的自协方差最小二乘估计算法,分别讨论观测噪声或状态噪声为有色噪声、以及两者均为有色噪声3种情况的噪声估计模型,并通过数值仿真对算法的正确性和有效性进行验证。
2 有色噪声估计模型白噪声是一种理想的噪声,实际数据处理中的噪声往往具有一定的相关性,相关性较弱时,才可将其近似视为白噪声进行处理,当相关性特征不可忽略时,任何忽略有色噪声影响的数据处理理论和方法均不能保证估计结果的真实可靠[4, 19, 20]。对有色噪声系统的协方差估计将分有色状态噪声、有色观测噪声和状态噪声、观测噪声均为有色噪声3种情况分别进行讨论。
2.1 状态噪声为有色噪声考虑如下状态噪声为有色噪声的线性时不变离散系统
式中,ηk为白噪声驱动的有色噪声;wk~N(0,Qw),vk~N(0,Rv),wk和vk不相关。
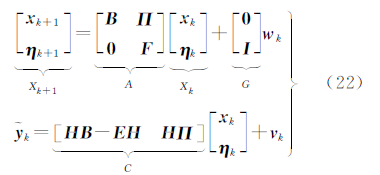
采用状态增广方法,将ηk也视为状态向量的一部分,构造一个只由白噪声驱动的系统,则状态增广后的状态方程和观测方程为
状态增广后的预测状态向量 ,L为式(2)的稳态卡尔曼滤波增益,新息Yk=yk-CXk|k-1,状态估值
,L为式(2)的稳态卡尔曼滤波增益,新息Yk=yk-CXk|k-1,状态估值 ,整理可得,预测状态向量的递推公式
,整理可得,预测状态向量的递推公式

令预测状态向量的误差εk=Xk-Xk|k-1,并将其代入式(3)和新息表达式,整理可得基于新息的状态空间模型为[16]
式中A=(A-ALC);G=[G-AL];wk=[wk vk]T。
预测状态误差协方差Cε=E(εkεTk),稳态滤波时,其满足李雅普若夫等式
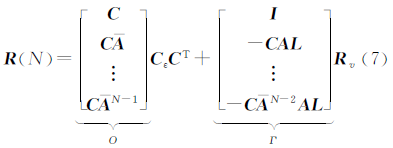
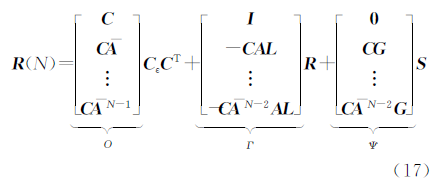
通过克罗内克积运算(克罗内克积的性质见附录)将式(5)转换为矢量形式 式中,“⊗”表示克罗内克积算子,下标“s”表示矩阵按列序排列。由上式可知,预测状态误差协方差Cε与状态噪声协方差矩阵Qw、观测协方差矩阵Rv相关。同时令R(N)=E(YkYTk)…E(Yk+NYTk)T,由此可得新息Yk的相关函数R(N)可表示

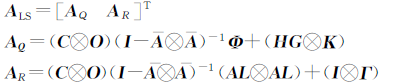
同理,通过克罗内克积运算将式(7)转换为矢量形式,得 R(N)是关于Cε和Rv的函数,顾及Cε与Qw、Rv相关。将式(6)代入式(8),可得 通过构造基于新息的状态空间模型,将R(N)表示为状态噪声协方差矩阵Qw和观测协方差矩阵Rv的函数,由此可采用最小二乘法同时对Qw、Rv进行估计 式中


综上所述,当状态噪声为有色噪声时,通过状态增广,构造只由白噪声驱动的系统,在ALS列满秩条件下可由式(10)得到噪声协方差的唯一解。
2.2 观测噪声为有色噪声考虑如下状态噪声为有色噪声的线性时不变离散系统
式中,Δk为白噪声驱动的有色噪声;wk~N(0,Qw),vk~N(0,Rv),wk和vk不相关。如果对此系统进行状态增广,则系统的观测方程中无观测噪声,无法进行卡尔曼滤波。但可通过对同类观测值差分的方法消除有色噪声。
令yk=yk+1-Eyk,则式(11)可整理为
其中 状态噪声与观测噪声间的互协方差矩阵S表示为状态噪声Qw的函数;模型(12)的观测噪声协方差矩阵R是关于Qw和Rv的函数。



稳态滤波时,模型(12)的预测状态误差协方差Cε满足李雅普诺夫等式

 的状态空间模型,形同于式(4)。此时,新息的相关函数R(N)与预测状态噪声协方差Cε、模型(12)的观测噪声协方差矩阵R和相关噪声协方差矩阵S有关[18]
的状态空间模型,形同于式(4)。此时,新息的相关函数R(N)与预测状态噪声协方差Cε、模型(12)的观测噪声协方差矩阵R和相关噪声协方差矩阵S有关[18]
顾及S、R是关于状态噪声Qw和观测噪声Rv的函数,将式(14)、式(15)代入式(17)整理得

分别对式(16)和式(18)进行克罗内克积运算将其转换为矢量形式,并整理得
式中,Φ=G⊗G+ALHG⊗ALHG-G⊗ALHG-ALHG⊗G。由此可知,新息Yk的相关函数R(N)与状态噪声协方差Qw和观测噪声协方差Rv相关。对其进行最小二乘估计,可得 其中

2.3 状态噪声和观测噪声均为有色噪声
考虑如下状态噪声、观测噪声均为有色噪声的线性时不变离散系统
式中,ηk、Δk均为由白噪声驱动的有色噪声;wk~N(0,Qw),vk~N(0,Rv),wk和vk不相关。通过状态扩展可消除有色状态噪声,再差分同类观测值可消除有色观测噪声的影响,由此得到只含白噪声的系统 式中,yk=yk+1-Eyk。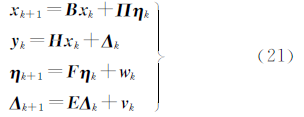
式(22)满足状态噪声和观测噪声均为白噪声,将其代入式(10)可进行噪声协方差估计。
3 数值仿真试验为不失一般性,本文以目标追踪系统为例,目标运动状态包括位置和速度,其卡尔曼滤波模型可描述为
式中,T=0.5;G=11T;ηk=aηk-1+wk-1;Δk=bΔk-1+vk-1;w~N(0,1);v~N(0,1)。共采用以下3种方案对本文提出的算法进行分析。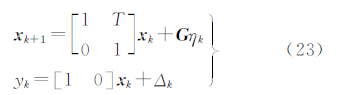
方案1:a=0.9,b=0,状态噪声为有色噪声。方案2:a=0,b=0.9,观测噪声为有色噪声。方案3:a=0.9,b=0.9,状态噪声、观测噪声均为有色噪声。
设定数据长度为1000,状态噪声协方差的初值Q=10,观测噪声协方差的初值R=0.1,分别采用ALS和本文提出的有色噪声的自协方差最小二乘法(autocovariance least squares for colored noise,ALSCN)按以上3个方案各进行200次蒙特卡洛仿真。图 1~图 3分别给出了状态噪声为有色噪声、观测噪声为有色噪声和两者均为有色噪声的估计结果。3组方案的噪声估计结果的平均值和均方根误差见表 1、表 2。按照以上3种方案,分别采用噪声协方差初值、ALSCN估计的噪声协方差和真实噪声协方差进行卡尔曼滤波,状态估值的均方根误差结果见图 4 (a)~ (c)。

|
| 图 1 状态噪声为有色噪声 Fig. 1 Colored state noise |

|
| 图 2 观测噪声为有色噪声 Fig. 2 Colored observation noise |

|
| 图 3 状态噪声、观测噪声均为有色噪声 Fig. 3 Colored state noise and colored observation noise |

|
| 图 4 3种噪声协方差条件下的卡尔曼滤波结果 Fig. 4 Results of Kalman filter with three different noise covariance |
| 方案1 | 方案2 | 方案3 | ||||
| Q | R | Q | R | Q | R | |
| 真值 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 |
| ALS | 15.52 | -2.19 | 1.70 | 0.23 | 17.04 | -3.25 |
| ALSCN | 1.00 | 1.00 | 1.00 | 0.99 | 0.97 | 1.00 |
| 方案1 | 方案2 | 方案3 | ||||
| Q | R | Q | R | Q | R | |
| ALS | 14.77 | 3.25 | 0.72 | 0.77 | 16.31 | 4.30 |
| ALSCN | 0.15 | 0.08 | 0.13 | 0.16 | 0.31 | 0.15 |
从噪声估计结果可以看出:
(1) 由图 1、3和表 1、2可见,当状态噪声为有色噪声时,无论观测噪声是否为有色噪声,采用ALS算法时,Q的均值分别为15.52和17.04,均方根值分别为14.77和16.31,R的均值分别为-2.19和-3.25,均方根值分别为3.25和4.30,噪声估计结果存在严重偏差,特别是对状态噪声估计的影响非常明显,且难以保证结果的正定性。
(2) 由图 2和表 1、2可见,当观测噪声为有色噪声时,采用ALS算法的噪声估计结果虽然正定,但存在系统性偏差。在进行噪声估计时,必须考虑有色噪声的影响。
(3) 当状态噪声为有色噪声或者观测噪声为有色噪声以及状态噪声、观测噪声均为有色噪声时,采用本文提出的有色噪声自协方差最小二乘法,均能较好地估计出噪声协方差矩阵,且具有较高的估计精度。
(4) 由图 4 (a)~(c)可以看出,当噪声协方差不准时,会影响卡尔曼滤波精度;采用本文提出的有色噪声自协方差最小二乘法估计出的噪声协方差进行卡尔曼滤波,其滤波精度与真实噪声的卡尔曼滤波精度基本相当。
4 结 论传统的自协方差最小二乘估计方法适用于白噪声协方差估计,用于有色噪声协方差估计时存在严重偏差。本文基于自协方差最小二乘估计的基本思想,针对状态噪声或者观测噪声为有色噪声、以及两者均为有色噪声3种情况,给出了相应的有色噪声自协方差最小二乘估计模型,并通过数值仿真验证了方法的正确性和有效性。有色噪声的自协方差最小二乘估计方法可应用于组合导航、GPS数据处理和航空重力测量数据处理等领域。需要指出的是,本文方法是建立在有色噪声函数模型已知的条件下,后续工作将围绕有色噪声模型完全未知的情况下的函数模型识别和协方差估计展开研究。
| [1] | YANG Yuanxi, HE Haibo, XU Tianhe. Adaptive Robust Filtering for Kinematic GPS Positioning[J]. Acta Geodaetica et Cartographica Sinica, 2001,30(4):293-298. (杨元喜,何海波,徐天河.论动态自适应滤波[J].测绘学报,2001,30(4):293-298.) |
| [2] | YANG Yuanxi. Properties of the Adaptive Filtering for Kinematic Positioning[J]. Acta Geodaetica et Cartographica Sinica, 2003,32(3):189-192.(杨元喜. 动态定位自适应滤波解的性质[J]. 测绘学报,2003,32(3):189-192.) |
| [3] | YANG Yuanxi. Model Error Influence on Kalman Filtering[J]. Science of Surveying and Mapping, 2006,31(1):17-18.(杨元喜.动态Kalman滤波模型误差的影响[J].测绘科学,2006,31(1):17-18.) |
| [4] | FU Mengyin, DENG Zhihong, YAN Liping. The Applications of Kalman Filtering Theory on the Navigation Systems[M]. Beijing: Science Press, 2010. (付梦印,邓志红,闫莉萍.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2010.) |
| [5] | HE Zhengbin, WU Fumei,NIE Jianliang. Error Influences of Prior Covariance Matrices on Dynamic Kalman Filtering[J]. Geomatics and Information Science of Wuhan University, 2011,36(1):34-38. (何正斌,吴富梅,聂建亮. 先验协方差阵误差对动态Kalman滤波解的影响[J]. 武汉大学学报:信息科学版,2011,36(1):34-38.) |
| [6] | SHUMWAY R H, STOFFER D S. Time Series Analysis and Its Application[M]. New York : Springer-Verlag, 2000. |
| [7] | RAGHAVAN H, TANGIRALA A K, GOPALUNI R B, et al. Identification of Chemical Processes with Irregular Output Sampling[J]. Control Engineering Practice, 2006,14:467-480. |
| [8] | HU Guorong, OU Jikun. The Improved Method of Adaptive Kalman Filtering for GPS High Kinematic Positioning[J]. Acta Geodaetica et Cartographica Sinica, 1999, 28(4):290-294. (胡国荣,欧吉坤. 改进的高动态GPS定位自适应卡尔曼滤波方法[J]. 测绘学报, 1999, 28(4):290-294.) |
| [9] | MOHAMED A H, SCHWARZ K P. Adaptive Kalman Filtering for INS/GPS[J]. Journal of Geodesy, 1999, 73(4):193-203. |
| [10] | YANG Yuanxi, XU Tianhe. An Adaptive Kalman Filter Combining Variance Component Estimation with Covariance Matrix Estimation Based on Moving Window[J]. Geomatics and Information Science of Wuhan University, 2003, 28(6):714-718. (杨元喜,徐天河. 基于移动开窗法协方差估计和方差分量估计的自适应滤波[J]. 武汉大学学报:信息科学版,2003, 28(6):714-718.) |
| [11] | GAO Weiguang, YANG Yuanxi, CUI Xianqiang, et al. Application of Adaptive Kalman Filtering Algorithm in IMU/GPS Integrated Navigation System[J]. Geomatics and Information Science of Wuhan University, 2006, 31(5):466-469. (高为广, 杨元喜, 崔先强, 等. IMU/GPS组合导航系统自适应Kalman滤波算法[J]. 武汉大学学报:信息科学版, 2006, 31(5):466-469.) |
| [12] | MEHRA R. On-line Identification of Linear Dynamic Systems with Applications to Kalman Filtering[J]. IEEE Transactions on Automatic Control, 1971,16(1):12-21. |
| [13] | MEHRA R. Approachies to Adaptive Filtering[J]. IEEE Transactions on Automatic Control, 1972,17(5):693-698. |
| [14] | CARREW B, BELLANGER P. Identification of Optimum Filter Steady State Gain for System with Unknown Noise Parameters[J]. IEEE Transactions on Automatic Control, 1973,18(60):582-587. |
| [15] | ODELSON B J, RAJAMANI M R, RAWLINGS J B. A New Autocovariance Least-squares Method for Estimating Noise Covariances[J]. Automatica, 2006,42(2):303-308. |
| [16] | ODELSON B J, LUTZ A, RAWLINGS J B. The Autocovariance Least-squares Method for Estimating Covariances: Application to Model-based Control of Chemical Reactors[J]. IEEE Transactions on Control Systems Technology, 2006,14(3):532-540. |
| [17] | RAJAMANI M R, RAWLINGS J B. Estimation of the Disturbance Structure from Data Using Semidefinite Programming and Optimal Weighting[J]. Automatica, 2009,45(1):142-148. |
| [18] | AKESSON B M, JORGENSEN J B, POULSEN N K, et al. A Generalized Autocovariance Least-square Method for Kalman Filter Tuning[J]. Journal of Process Control, 2008,18:769-779. |
| [19] | YANG Yuanxi, CUI Xianqiang. Influence Functions of Colored Noises on Kinematic Positioning—Taking the AR Model of First Class as an Example[J]. Acta Geodaetica et Cartographica Sinica, 2003,32(1):6-10. (杨元喜,崔先强.动态定位有色噪声影响函数——以一阶AR模型为例[J].测绘学报,2003,32(1):6-10.) |
| [20] | CUI Xianqiang, YANG Yuanxi, GAO Weiguang. Comparison of Adaptive Filter Arithmetics in Controlling Influence of Colored Noises[J]. Geomatics and Information Science of Wuhan University, 2006,31(8):731-735. (崔先强,杨元喜,高为广. 多种有色噪声自适应滤波算法的比较[J]. 武汉大学学报:信息科学版,2006,31(8):731-735. |