



2. 天津市测绘院,天津 300381
2. Tianjin Institute of Surveying and Mapping,Tianjin 300381,China
1 引 言
机载激光雷达(light detection and ranging,LiDAR)技术能够直接获取三维空间信息,在国土测绘、资源勘查、灾害监测等领域都有着广泛的应用前景。LiDAR系统一般由差分GPS定位系统(DGPS)、惯性导航系统(INS)以及激光扫描测距系统组成,利用激光脉冲发射时刻的平台位置、姿态以及脉冲的扫描角和测距值直接计算探测目标的三维坐标[1]。作为一种多传感器集成系统,其采集的原始数据受多种误差影响,会造成LiDAR条带之间的不重合与错位,严重影响数据的后续处理[2]。因此,减小系统误差改善数据精度实现条带间的配准对LiDAR数据后处理具有重要意义。
针对这一问题,目前有两种解决思路[3],一种是直接从条带数据之间的差异入手,选择某种数学函数对各种误差因素的影响进行拟合,通过条带平差(strip adjustment) 将各条带纠正到统一的参考框架下。常用的模型有3参数模型[4]、9参数模型[5]、12参数模型[6]、仿射变换模型[7]等。这些模型虽然简单,但却不严格,且条带平差精度往往与所选模型相关。
另一种减小系统误差的思路则是从系统误差源入手,利用系统检校(system calibration)的方法估算出误差参数,对数据进行直接补偿实现条带之间的整体配准。由于系统误差在一定条件下具有稳定性,检校得到的系统误差参数可直接应用于测区,不需要对每个条带进行平差,对于电力走廊或高速公路等带状测绘工作也能适用,具有稳定性好、适用性强的优势。文献[8]分析了LiDAR系统各项误差源,并介绍了各类误差的估算方法。文献[9]针对激光扫描仪与IMU之间的偏心角,设计一种分步检校法,依次对3个角度进行检校,该方法需要手工选择横截面和同名特征并采用循环迭代的方式对误差参数进行调整。文献[10]考虑到检校模型的复杂性以及激光点原始信息获取的困难性,提出了简化模型和半严格检校模型,利用一定的假设条件对激光定位方程进行简化。文献[11]中的Skaloud方法直接利用激光定位严格模型作为检校模型,具有更高的检校精度。考虑到激光点离散分布的特点,文献[12, 13]采用线特征作为对应基元,提出了利用共线条件的系统检校方法。由于在进行直线提取时,一般需要对相邻两个平面求交来确定直线的精确位置,文献[11, 14, 15]直接利用面特征作为对应基元,设计了基于共面条件的检校方法。上述方法大多需要手工确定同名特征。考虑到自动提取同名特征的难度,文献[16]采用DEM匹配方法进行检校,并在此基础上形成了商用化的检校软件TerraMatch。文献[17]采用ICP算法来确定点面之间的对应关系,并进行系统误差的平差解算。这两类方法都属于非严格对应的方法,不需要预先确定同名基元,通过迭代的方式逐步实现对应,易于实现自动化,但需要较好的初值,以保证迭代收敛。
总的来看,系统检校是改善LiDAR数据定位精度的有效手段,在设计系统检校方法时采用严格定位模型,并利用同名特征对应的方法,能够有效提高检校的精度和稳健性。当前采用线/面特征的检校方法,对线/面特征的法方向和分布都有一定要求,如要求提取不同方向、不同坡度的直线/平面,为了达到较高的检校精度,要求平面尽可能垂直于3个坐标轴[15],此外还要求对应特征的分布尽量均匀[18]。这些要求仅适用于城市地区几何特征丰富的区域,严重制约了算法的适用性。相对于线/面特征的提取与匹配,点特征在自然场景中更容易获得,且其提取和匹配方法更为成熟,更易于实现自动化。基于点特征的平差方法具有潜在的优势,如果能利用同名点特征进行系统检校将有助于提高检校方法的实用性和自动化程度。由于LiDAR点云是半随机采样,一般认为条带之间不存在真实意义的同名点,基于同名点的检校方法最大障碍在于如何建立同名点的严格平差模型。本文提出了一种虚拟连接点模型,以解决点云条带之间的同名点对应问题,并针对LiDAR数据特点设计了一种特征点自动提取与匹配流程,实现了基于同名点特征的LiDAR系统误差检校。
2 系统检校模型 2.1 检校参数选择LiDAR系统误差一般可分为两类:一类是各传感器自身的误差,如激光扫描仪从激光脉冲发射到接收的计时误差,扫描系统的测角误差,GPS定位误差以及IMU定姿误差等;另一类是各传感器之间的对准误差,如LiDAR系统在安装时,GPS天线中心与激光扫描中心的不重合(通常称为偏心分量),扫描框架与IMU框架之间的偏角(通常称为视准轴偏角)。这类误差一般称为系统安置误差[19]。从发表的文献来看,常用的检校参数包括:偏心角、偏心分量、激光测距误差以及扫描角误差等[11, 14, 15, 19]。文献[3]中对现有方法所采用的检校参数进行了总结,并指出采用哪些参数进行检校目前并无定论,需要根据实际情况进行选择。
考虑到LiDAR系统测距精度较高,而偏心分量可在系统安装时,借助全站仪精确测量,因此本文选择偏心角和扫描角误差作为检校参数。根据LiDAR定位原理[1],激光点的三维坐标计算方法为
式中,X=[X Y Z]T为激光脚点三维坐标向量;[XGPS YGPS ZGPS]T为GPS天线中心坐标;Rimu为IMU姿态角构成的旋转矩阵;Rmisalign为激光扫描框架与IMU框架之间的偏心角α、β、γ构成的旋转矩阵;Rscan为扫描角旋转矩阵;ρ为激光脉冲测距值;[u v w]T为GPS天线与扫描仪中心间的偏心分量。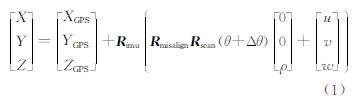
上式中激光脉冲测距值ρ与扫描角θ是由系统记录的已知值,偏心分量由全站仪测得,激光脉冲发射时刻的位置和姿态可由POS系统获得的观测值通过卡尔曼滤波内插得到,偏心角α、β、γ和扫描角误差Δθ是待求未知数。
由于系统误差会造成条带之间的错位,检校目标就是实现不同条带上的同名点坐标一致,因此可列出如下观测方程
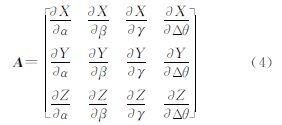
式中,[X YZ ]T是不同条带同名点坐标的均值;[Xi Yi Zi]T是第i条带上的同名点坐标。根据式(1)将激光点坐标表示为待求系统参数的函数,对方程进行线性化后,可列出误差方程(3),并可按最小二乘原理进行求解 式中,A为待求未知数的系数矩阵,其形式为

为了求解系统误差参数,只需要确定不同条带上的同名激光点,就可以按最小二乘原理对系统参数进行估计,式(3)中待求未知数为4个,每对同名点可列3个方程,最少只需要两对同名点,即可解算。
2.2 虚拟连接点原理由于现有的LiDAR系统采用扫描方式半离散采样,难以保证各扫描条带都能采样到同一个目标点,在各条带之间提取的同名点一般都不是真实的激光脚点,无法获得激光脉冲测距值、扫描角等必要的观测信息,因此不能直接进行系统误差解算。考虑到同名点与周围的激光点之间存在固有的内部联系,本文提出了一种虚拟连接点模型,建立同名特征点与周围的真实激光脚点的联系,以实现基于点对应的系统误差解算。
虚拟连接点的原理基于一个简单的假设:由系统误差所造成的扫描条带整体非线性变形可以用一系列的局部刚体变换来近似。将同名点及其邻域内的激光脚点看成是一个刚体,并利用刚体变换建立起同名点坐标与真实激光脚点坐标之间的联系。
如图 1,假设点p和q为两条激光扫描条带上确定的一对同名连接点,p、q并不要求是真实的激光脚点,将点p及其最邻近的3个真实激光脚点p1、p2、p3组合在一起,构成的虚拟连接点P,同理将点q及其周围3个真实激光脚点q1、q2、 q3组合,构成虚拟连接点Q[24]。设p点的初始坐标为Xp,在经过系统误差改正后,p点的坐标变为X′p,但其坐标值无法直接算出,根据局部刚体变换假设,则系统误差改正后的p点坐标与初始坐标之间满足刚体变换关系,因此可以利用刚体变换求解新的同名点p坐标
式中,Rrigid为刚体变换的旋转矩阵;t为平移向量。刚体变换参数可由3个激光脚点p1、 p2、 p3经系统参数改正前后的坐标计算得到,而激光脚点p1、 p2、 p3坐标可利用方程(1)直接计算得到。因此同名连接点p的坐标可表示为系统参数改正量的函数 根据上面的推导,只需要确定同名点p、 q的初始坐标,并将同名点与周围的真实激光脚点建立虚拟连接点模型,利用刚体变换假设即可构造出同名点坐标与系统误差参数之间的函数模型,并按式(3)进行平差解算。


|
| 图 1 虚拟点模型 Fig. 1 Virtual tie point model |
利用虚拟连接点模型,只需要在LiDAR扫描条带间提取同名连接点,即可按上节推导的公式进行系统误差检校。设计了一种系统误差自动检校流程(图 2),整个流程可以划分为同名点提取和检校参数估计两个部分,各步骤具体处理过程介绍如下。

|
| 图 2 算法流程图 Fig. 2 Flow chart of mounting error self-calibration |
LiDAR数据不仅记录有探测目标的位置信息(X,Y,Z),还记录有目标对激光脉冲的反射强度信息。强度信息反映了地物对近红外激光的反射特性,更利于进行特征点的检测与匹配[20]。在进行同名点提取时,以强度信息为主进行特征点检测与匹配,并辅助高程信息对得到的同名点进行精化,同名点提取过程包括以下步骤。
3.1.1 点云栅格化对离散的点云数据构建Delaunay三角网,采用三角形插值对点云强度值进行栅格化,格网间距按平均点间距进行设置,对每条LiDAR条带生成强度影像。
3.1.2 同名点匹配采用影像匹配中广泛应用的SIFT算法[21]对各条带强度影像进行特征点提取与匹配,到初始的同名点集。SIFT算法可以有效克服条带之间的尺度和旋转差异,具有较高的匹配成功率。
3.1.3 同名点精化利用SIFT算法得到的初始同名点集中难以避免的存在误匹配点,选择RANSAC稳健估计方法[22],对原始匹配点进行精化,在两条带之间用仿射变换作为约束,剔除掉误匹配的粗差点。
3.1.4 同名点分类从强度影像上提取的同名点具有确定的平面坐标,而高程坐标未知,可以采用线性内插方式确定同名点的高程。但同名点提取时仅考虑了地物辐射特征,未考虑同名点邻域内的几何信息,造成许多许多同名点位于辐射特征明显(如建筑物边缘),而几何表面不稳定的区域,直接利用邻域内的激光点进行内插难以获得可靠的高程。按照高程内插的可靠性对同名点进行分类,通过对各条带上同名点周围指定半径(如5倍点间距)内的激光点进行平面拟合,判断同名点是否位于稳定平面内,如果拟合平面的均方根误差小于阈值(如0.1 m)则认为高程插值可靠,将该同名点分类为平高点,平差时3个坐标都可参与计算(可列3个方程);如果大于阈值则将该点分类为平面点,只有平面坐标参与平差计算(可列两个方程)。
3.2 检校参数估计利用上述的同名点提取方法可以在LiDAR条带间自动确定一组同名点坐标初值,下面即可利用虚拟连接点模型,对系统误差参数进行平差解算。
3.2.1 建立虚拟连接点模型对确定的同名点按以下方式建立虚拟连接点模型:首先提取各条带同名点周围指定半径内(如5倍点间距)的激光点,对所选激光点建立Delaunay三角网,选择包围同名点的三角形,并将该三角形的3个顶点作为虚拟连接点中的3个激光脚点。如果指定半径内的激光点数少于3个会导致Delaunay三角网构建失败,这时应将该同名点删除,以确保每个虚拟连接点中的3个真实激光点与同名点足够接近,满足局部刚体变换假设。
3.2.2 设置未知数初值可根据先验知识设定需要检校的系统误差近似值,由于偏心角和扫描角误差都较小,可将其初值都设为0。
3.2.3 计算同名点坐标记同名点k在第i条带上的坐标为[XkiYkiZki]T,在第1次计算时,直接采用同名点提取时获得的坐标初值。在迭代处理过程中,可利用当前的系统误差参数,按照LiDAR定位方程(1)计算虚拟连接点中3个激光点坐标,用当前激光点坐标和前一次的激光点坐标估算刚体变换参数,并用这组参数按式(5)计算新的同名点坐标。
3.2.4计算方程观测值将各条带上同名点坐标的平均值作为方程观测值,如对于同名点k坐标观测值可按下式计算
3.2.5 计算未知数系数矩阵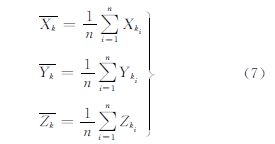
未知数的系数矩阵如式(4),需要对每个条带上的同名点坐标分别求解。由于每次迭代过程中同名点坐标需要按照步骤(3)重新计算,同名点坐标与系统误差参数之间函数关系复杂(式(6)),无法直接写出解析形式,采用有限差分法直接计算未知数的系数矩阵。
3.2.6 平差解算未知数利用最小二乘原理,对式(3)进行平差解算,求解过程需要解决一个非约束参数最小化问题,目前有多种优化解法,采用LM算法[23]进行优化求解。
3.2.7 迭代终止判断将残差是否收敛以及未知数是否改变作为迭代终止条件,满足其一则迭代终止,输出系统误差的估计值;两者都不满足,则将当前结果作为未知数近似值,返回步骤(3)重新执行。
4 试验与分析 4.1 试验描述
采用河南省安阳市获取的真实LiDAR数据对本文方法进行试验。试验数据由Leica公司的ALS50II机载LiDAR系统采集,共8条激光扫描条带,其中1~4号条带按交叉方式飞行(1、3东西向,2、4南北向飞行),如图 3(a),1、2号条带航高760 m,平均点间距约为0.5 m,3、4号条带航高1310 m,平均点间距为0.9 m;5~8号条带在沿东西向平行飞行,飞行高度为500 m,平均点间距为0.5 m,相邻条带间重叠约为15%,如图 3(b)。
将试验方案设计成两组,第1组试验采用1~4号条带进行系统误差检校,第2组试验利用检校得到的系统参数直接改正5~8号条带,并对系统误差改正后的条带间相对精度进行评估。作为对比,选择目前应用较为广泛的基于共面条件的系统检校方法[11]与本文方法进行比较,并对试验结果进行分析。

|
| 图 3试验区 Fig. 3Experimental area |
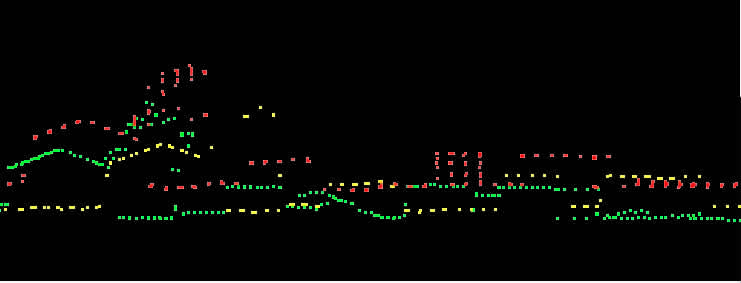
利用本文方法,在1~4号条带的强度影像自动提取了738个同名点,其中平高点312个,平面点426个。在上述条带上手工选取了16个同名平面。同名点和同名平面的分布见图 4,红色为同名点,绿色为同名平面。从图中可以看到,自动提取的同名点在各条带上分布均匀,且提取过程不需要人工干预,效率高;而同名平面的提取完全依赖人工处理,费时费力,所选平面大都位于建筑物上,难以保证均匀分布。

|
| 图 4 同名点和同名平面分布 Fig. 4 Corresponding points and planes on strips |
基于自动提取的同名点,用本文方法进行系统误差检校,利用手工提取的同名平面,按照Skaloud方法进行系统误差检校,两种方法得到的系统误差参数见表 1。两种方法得到的结果基本一致,但在γ 角和扫描角误差上存在微小差异。
| (°) | ||||
| α | β | γ | Δθ | |
| Skaloud | -0.295 0 | 0.152 2 | -0.078 9 | -0.182 6 |
| 本文方法 | -0.294 5 | 0.136 8 | -0.050 8 | -0.143 6 |
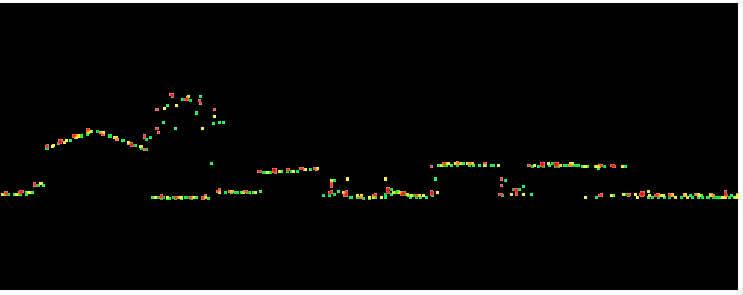
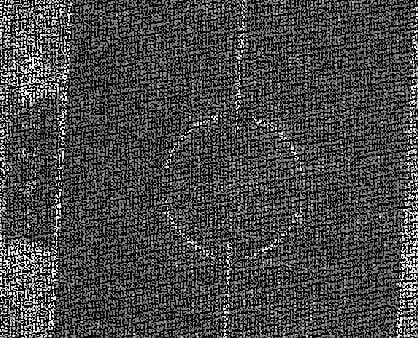
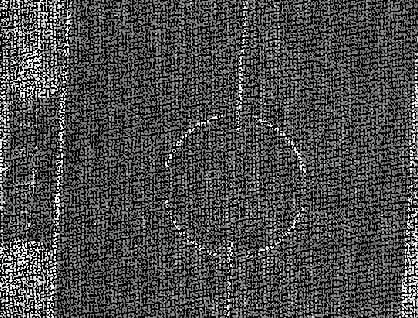
在检校条带上选取两个区域对检校精度进行目视检查,表 2第2列为检校前后高程剖面对比,检校前人字顶房屋和水平地面都存在较大错位,检校后各条带上的屋顶和地面都贴合在一起。表 2第3列为4个条带的强度值叠加图,检校前由于存在平面偏移造成机场跑道上圆圈错位,检校后各条带的圆圈重合在一起,平面误差得到很好的纠正。从这两个区域来看,本文方法与Skaloud方法的检校精度目视差异不大。

为了定量分析检校精度,采用两组检校结果分别对同名点误差和同名平面误差进行统计,同名点坐标中误差见表 3,同名平面的点面距离中误差见表 4。对于同名点,本文方法的高程精度与Skaloud方法一致,而平面精度明显优于Skaloud方法。其原因在于本文方法在解算时直接对同名点在3个坐标轴方向上的偏差进行改正,而Skaloud方法则是利用平面法方向在3个轴上的投影间接改正3个方向上的偏移,由于在实际情况下无法提取到垂直于3个轴的平面[15],因此其平面精度略低。对于同名平面来说,统计得到的点面距离中误差本文方法略低于Skaloud方法(1 cm),其原因是Skaloud方法在检校时,将各条带上的对应点共面作为约束条件,而且参与平差的点数多(17 233)。通过交叉检查的方式可见,本文方法能够达到较高的检校精度(约1/4点间距),且在平面精度上具有优势。
| m | ||
| Skaloud | 本文方法 | |
| RMS X | 0.244 | 0.149 |
| RMS Y | 0.210 | 0.141 |
| RMS Z | 0.033 | 0.033 |
| m | |||
| ID | 点数 | Skaloud | 本文方法 |
| 1 | 2 341 | 0.015 | 0.063 |
| 2 | 1 804 | 0.050 | 0.017 |
| 3 | 2 460 | 0.014 | 0.061 |
| 4 | 2 584 | 0.195 | 0.206 |
| 5 | 570 | 0.029 | 0.035 |
| 6 | 539 | 0.055 | 0.033 |
| 7 | 1 027 | 0.034 | 0.035 |
| 8 | 872 | 0.030 | 0.035 |
| 9 | 766 | 0.031 | 0.036 |
| 10 | 364 | 0.019 | 0.067 |
| 11 | 1 788 | 0.016 | 0.014 |
| 12 | 1 774 | 0.027 | 0.025 |
| 13 | 48 | 0.027 | 0.016 |
| 14 | 50 | 0.055 | 0.038 |
| 15 | 225 | 0.023 | 0.018 |
| 16 | 21 | 0.062 | 0.038 |
| 合计 | 17 233 | 0.080 | 0.089 |
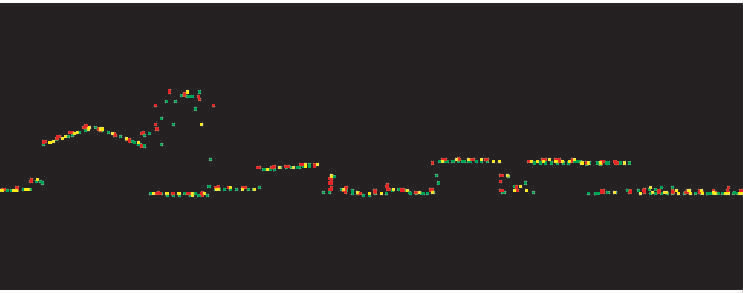
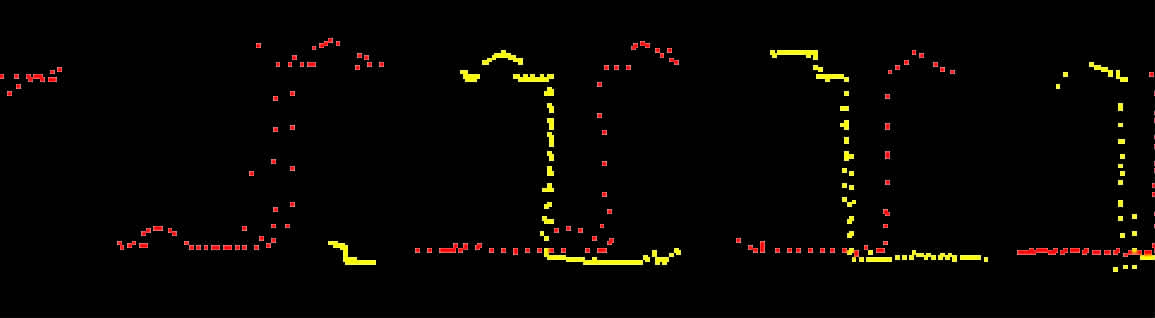
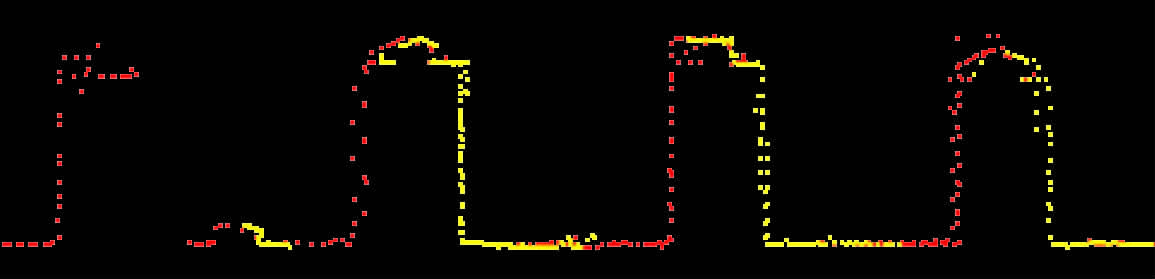
系统误差检校的优势在于参数的稳定性,便于推广到测区中的其他数据。目前很多研究方法仅在检校区域进行精度验证,为了验证本文检校结果的可靠性,利用获得的两组检校参数直接对5~8号条带进行系统误差改正,并对改正后的精度进行评估。在5~8号条带重叠区手工选择3个剖面进行目视检查。系统误差改正前后的高程剖面对比见表 5。从目视效果看,利用系统检校得到的参数对扫描条带直接进行纠正,可以有效改正条带间的错位,提高了数据的相对精度,对比两组参数改正的结果,本文方法的平面精度要优于Skaloud方法。
| 条带 重叠区 | 方法 | 高程剖面 |
| 5~6 | 原始 | 
|
| Skaloud | 
| |
| 本文方法 |  | |
| 6~7 | 原始 |
 |
| Skaloud | 
| |
| 本文方法 |  | |
| 7~8 | 原始 |
 |
| Skaloud |
 | |
| 本文方法 | 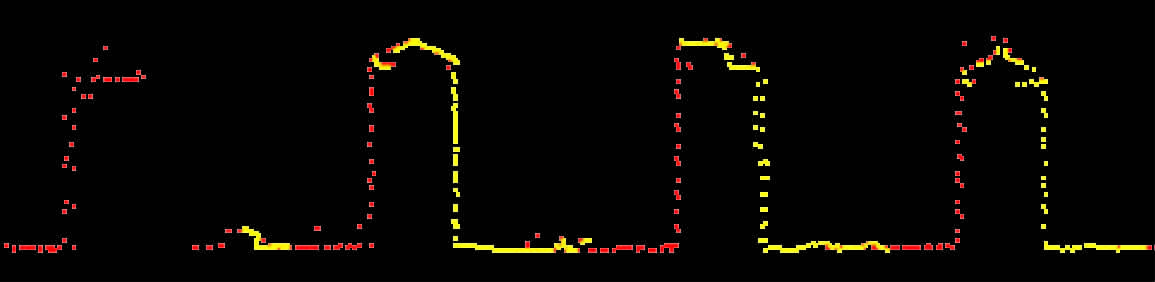 |
为了定量分析系统误差改正后条带间相对精度,手工选取21个同名点和6个同名平面进行检查,为了保证同名特征提取的精度,同名点一般选在道路交叉口,同名平面选在特征明显的屋顶面上。为了避免引入高程插值带来的误差,对同名点只统计其平面坐标中误差见表 6,同名平面的点面距离中误差见表 7。从定量分析的结果来看,利用本文方法的检校结果进行系统误差改正后,平面精度在1/3点间距左右,点面距离中误差小于5 cm。可见利用检校结果进行系统误差改正时,本文方法的精度优于Skaloud方法。
| m | |||
| ID | 点数 | Skaloud | 本文方法 |
| 1 | 535 | 0.020 | 0.016 |
| 2 | 2384 | 0.022 | 0.022 |
| 3 | 2253 | 0.025 | 0.025 |
| 4 | 1154 | 0.111 | 0.098 |
| 5 | 711 | 0.024 | 0.024 |
| 6 | 2499 | 0.019 | 0.019 |
| 合计 | 9536 | 0.044 | 0.040 |
本文提出了一种全自动的LiDAR系统误差检校方法。该方法直接从LiDAR定位方程出发,能够实现系统误差的严格检校。针对离散点云之间难以确定同名点问题,设计了一种虚拟连接点模型,利用刚体变换假设将虚拟的同名点与真实的激光脚点联系起来,实现了基于点对应的严格平差。在此基础上,根据LiDAR数据的特点,设计了一种基于点云强度信息的同名点自动提取流程,实现了全自动的系统检校。通过真实数据试验,证明本文方法在检校精度与自动化程度上都优于传统的基于共面条件的检校方法。
由于传统的LiDAR检校方法一般是基于线特征和面特征进行的,适用范围受到诸多限制,且特征提取大都需要手工完成。本文提出了一种基于点特征的检校思路,充分发挥了点特征数量多、易提取的优势,具有更强的适用性和实用价值。当前对于影像的光束法平差大多是利用连接点实现的,利用虚拟连接点模型可以方便地将影像上的连接点与LiDAR上的同名点联系起来,将LiDAR系统检校与影像的空中三角测量结合,以实现点云与影像的联合光束法平差。
| [1] | BALTSAVIAS E P. Airborne Laser Scanning: Basic Relations and Formulas[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 1999, 54(2-3): 199-214. |
| [2] | SHAN J, TOTH C K. Topographic Laser Ranging and Scanning: Principles and Processing [M]. Boca Raton: CRC Press, 2008. |
| [3] | HABIB A, RENS J V. Quality Assurance and Quality Control of LiDAR Systems and Derived Data [R]. Portland:ASPRS LiDAR Terrain Mapping Committee,2008. |
| [4] | CROMBAGHS M J E, BRVGELMANN R. On the Adjustment of Overlapping Strips of Laser Altimeter Height Data[J]. International Archives of Photogrammetry and Remote Sensing, 2000, 33(B3/1): 224-231. |
| [5] | VOSSELMAN G, MAAS H G. Adjustment and Filtering of Raw Laser Altimetry Data[C]//Proceedings OEEPE Workshop on Airborne Laser Scanning and Interferometric SAR for Detailed Digital Elevation Models. [S.l.]: OEEPE Publication, 2001. |
| [6] | KILIAN J, HAALA N, ENGLICH M. Capture and Evaluation of Airborne Laser Scanner Data[J]. International Archives of Photogrammetry and Remote Sensing, 1996, 31: 383-388. |
| [7] | BRETAR F, PIERROT D M,ROUX M. Solving the Strip Adjustment Problem of 3D[C]// Proceedings of the IEEE IGARSS Airborne LiDAR Data.[S.l.]:IEEE,2004. |
| [8] | SCHENK T. Modeling and Analyzing Systematic Errors in Airborne Laser Scanners[R]. Columbus: Ohio State University, 2001. |
| [9] | ZHANG Xiaohong. Precise Point Positioning Evaluation and Airborne LiDAR Calibration[R]. Copenhagen: Danish National Space Center, 2005. |
| [10] | HABIB A, BANG K I. Alternative Methodologies for LiDAR System Calibration[J]. Remote Sensing,2010, 2(3):874-907. |
| [11] | SKALOUD J, LICHTI D. Rigorous Approach to Bore-sight Self-calibration in Airborne Laser Scanning[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2006, 61(1): 47-59. |
| [12] | FILIN S, VOSSELMAN G. Adjustment of Airborne Laser Altimetry Strips[J].International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2004, 34(B3): 285-289. |
| [13] | VOSSELMAN G, MASS H G. Airborne and Terrestrial Laser Scanning[M]. Dunbeath: Whittles Publishing, 2010. |
| [14] | FILIN S.Recovery of Systematic Biases in Laser Altimetry Data Using Natural Surfaces[J]. ISPRS Journal of Photogrammetric Engineering and Remote Sensing,2003, 69 (11):1235-1242. |
| [15] | HABIB A F, BANG K I, SHIN S W, et al.LiDAR System Self-calibration Using Planar Patches from Photogrammetric Data[R]. Padua: Fifth International Symposium on Mobile Mapping Technology, 2007. |
| [16] | BURMAN H. Calibration and Orientation of Airborne Image and Laser Scanner Data Using GPS and INS[D]. Stockholm: Royal Institute of Technology, 2000. |
| [17] | LEE J,HAN D. An Automatic Registration Method for Adjustment of Relative Elevation Discrepancies between LiDAR Data Strips[J]. GIScience and Remote Sensing,2010,47(1): 115-134. |
| [18] | POTHOU A, TOTH S. An Approach to Optimize Reference Ground Control Requirements for Estimating LiDAR/IMU Boresight Misalignment [C]// The Internal Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Beijing: IAPRS, 2008. |
| [19] | MORIN K W. Calibration of Airborne Laser Scanners [D]. Calgary: University of Calgary, 2002. |
| [20] | ABEDINI A, HAHN M. An Investigation into The Registration of LiDAR Intensity Data and Aerial Images Using the SIFT Approach[C]// The Internal Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Beijing: IAPRS, 2008. |
| [21] | LOWE D G. Distinctive Image Features from Scale-invariant Keypoints[J]. International Journal of Computer Vision, 2004,60(2): 91-110. |
| [22] | FISCHLER M A, Bolles R C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography[J]. Communications of the ACM, 1981, 24(6): 381-395. |
| [23] | MORTON K W, MAYERS D F. Numerical Solution of Partial Differential Equations, An Introduction[M]. Cambridge:Cambridge University Press, 2005. |
| [24] | ZHANG Jing, JIANG Wanshou. Self-calibration of LiDAR System Mounting Biases Using Virtual Tie Point Model[J]. Acta Geodaetica et Cartographica Sinica,2011,40(6):762-769.(张靖,江万寿.基于虚拟连接点模型的机载LiDAR系统安置误差自检校[J].测绘学报,2011,40(6):762-769.) |