



飞机的起飞、着陆和在跑道上滑行是其必须经历的动力学过程.飞机50%以上的安全事故发生在起飞和降落阶段,飞机不仅要具有良好的飞行特性,也须具有良好的地面运动特性[1].
目前关于飞机地面特性的研究主要集中在飞机的着陆缓冲[2]和滑行减震[1, 3],以及前轮摆振[4]等方面;关于飞机在地面滑行特性的研究则主要集中在飞机地面的转弯运动和轨迹控制优化;而针对飞机在地面上高速滑跑阶段的偏航和侧向运动的研究则较少.文献[5, 6]从动力学角度建立了飞机在跑道上的低速滑跑模型,假设轮子在地面上纯滚动,在考虑转向时前轮无侧滑的情况下,研究了飞机的转向运动.文献[7]在假设前轮无侧滑的基础上,研究了飞机在地面上中速滑行的操纵稳定性问题.
当飞机在跑道上滑跑时,若将轮子视为刚体,则飞机受到的约束为非完整约束[8].在非对称力作用下,飞机滑跑时会出现前起落架的横侧向变形和前轮的侧滑,导致飞机跑偏现象的发生.如何避免该现象的发生是一个值得研究的课题.
飞机在跑道上滑行的动力学问题属于非光滑非完整多体系统动力学问题.本文将飞机视为由机身和前后起落架构成的多体系统,考虑在主起落架轮子的刹车力矩不对称和侧向风力作用下引起的前起落架的横侧向变形和前轮侧滑等因素,用多体系统动力学方法建立飞机在跑道上滑行的动力学模型,通过数值仿真分析其动力学行为,并验证该方法的有效性.
1 飞机滑跑的力学建模
飞机的着陆过程一般包括下降、拉平、平飞减速、飘落和在地面减速滑跑等阶段.飞机着陆时,先是后轮与地面接触,然后是前轮与地面接触,在这一过程中轮子与地面之间存在滑动,经过短暂的时间后,前后轮均在跑道上纯滚动,这时再开始采取飞机滑跑减速的措施[9].减速措施包括空气动力减速和后轮刹车减速.由于飞机的质心在靠近主起落架轴线中点的前端,两个主起落架承受整机85%以上的重量,因此飞机滑跑时主起落架的轮子不易发生侧滑.若刹车时,后轮与地面出现相对滑动(拖胎现象),轮胎会过度磨损,飞机整体会出现突然的航向失稳,造成严重事故,这种现象是不被允许的.因此,飞机在跑道上滑跑时,主起落架的轮子是在跑道上纯滚动.
飞机在跑道上高速滑跑时,前轮的转弯系统处于减摆状态[10].当外部因素(如后轮刹车力的不对称性、风载荷等)使飞机出现偏转时,前起落架会受到较大的侧向力,使其出现横侧向的变形和轮子的侧滑现象,飞机滑跑的方向改变,会导致事故的发生.为建立飞机滑跑过程的动力学方程,分析非对称载荷对其运动的影响,需建立以下基本假设.
1.1 基本假设
根据上述飞机在跑道上滑行的具体情况,引入以下假设: ①飞机的机身(含机翼)以及前后起落架的轮子均视为刚体;②仅考虑前起落架侧向(垂直滑跑方向)变形;③飞机在跑道上滑跑时,机身作平面运动;④主起落架的两个轮子在地面上纯滚动(无任何方向的滑移);⑤轮子与跑道间的摩擦模型为库仑干摩擦.
1.2 飞机滑跑的运动模型
为描述飞机在跑道上的运动,设该系统的广义坐标为

 |
| 图 1 飞机滑跑平面运动主视图Fig. 1 Main view of aircraft taxiing planar motion |
在图 1中,h为飞机质心到跑道面的高度,r为轮子的半径,L2表示主起落架两轮轮心到机身几何对称面的距离.在图 2中,L1为前起落架轮心到主起落架轮轴轴线的平面投影距离,xi,yi(i=1,2,3)为各轮轮心的坐标.
 |
| 图 2 飞机滑跑平面运动俯视图Fig. 2 Top view of aircraft taxiing planar motion |
1.3 非完整约束方程
飞机在跑道上滑跑时受到的约束为非完整约束.
当前轮无侧滑时,系统的约束方程为
1.4 飞机前轮的非光滑约束条件
当前轮在跑道上纯滚动(无侧滑)时,即满足约束方程f4=0,该约束方程成立的条件是跑道作用在轮子上的摩擦力小于最大静摩擦力.若侧向最大摩擦力不是足够大,会使飞机在滑跑过程中跑偏.判断飞机前轮是否侧滑的约束条件用力的形式给出.设前轮与地面的侧向滑动的静、动摩擦系数分别是μ0和μ1.由库仑摩擦定律可知摩擦力与法向支撑力间应满足:

 r分别为前轮与跑道接触点的侧向滑移速度和加速度;sgn()为符号函数;Sgn()为集值函数,其定义式为
r分别为前轮与跑道接触点的侧向滑移速度和加速度;sgn()为符号函数;Sgn()为集值函数,其定义式为
2.1 系统的动力学方程
具有定常非完整约束多体系统的动力学方程可由Routh方程给出[11]:

 为约束方程关于广义速度的Jacobi矩阵的转置,系统的动能和势能可以写成广义速度和广义坐标的二次齐函数:
为约束方程关于广义速度的Jacobi矩阵的转置,系统的动能和势能可以写成广义速度和广义坐标的二次齐函数:

 为广义质量矩阵对时间的导数;Tq和Vq分别为系统的动能函数和势能函数对广义坐标列向量q求导.
为广义质量矩阵对时间的导数;Tq和Vq分别为系统的动能函数和势能函数对广义坐标列向量q求导.为避免数值仿真时出现约束方程的漂移,利用约束稳定化方法有

将Φ对时间求导可得



由此可得


应用常微分方程的数值计算方法求解式(17),由此可得到系统的 和q,再将其代入式(16),可得到λ.
和q,再将其代入式(16),可得到λ.
2.2 气动力计算
飞机在着陆滑行时受到空气动力,襟翼偏转到最大位置以提供较大的阻力和升力.此时飞机的升力和阻力由系数形式给出,着陆状态升力系数CL=1.5,阻力系数CD=0.2[12].若将空气动力向飞机质心简化,等效于一个力和一个力偶,沿飞机随体坐标系分解得到式(18)~式(21),式中的系数可通过试验和工程估算获得[13].
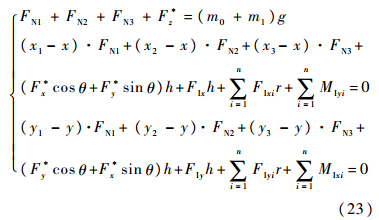
2.3 支撑力计算
为判断前轮是否发生侧滑,需要计算跑道对轮子的支撑力.由式(17)可计算出 ,进而得到惯性力,再用动静法,可以求出跑道对轮子的支撑力[14]为
,进而得到惯性力,再用动静法,可以求出跑道对轮子的支撑力[14]为
2.4 摩擦力计算
由式(16)可计算出Lagrange乘子λ(即跑道作用在轮子上的约束力).其中,对应于约束方程f1和f2的Lagrange乘子λ1和λ2分别表示主起落架两个轮子平行于滚动方向的摩擦力.对应于约束方程f3的λ3表示主起落架两后轮侧向摩擦力的合力.前起落架的轮子不发生侧滑时,λ4表示前轮的侧向静摩擦力.若发生侧滑后,约束方程f4被破坏,该约束方程是否被破坏(即前轮是否发生侧滑),由式(4)判断.
3 数值仿真算例
本算例分别考虑刹车力矩不对称和侧向风力对飞机滑跑动力学行为的影响.设飞机质量m0=20 000 kg,轮子质量m1=100 kg,后轮承受飞机机体总重的百分比ξ=90%.飞机对过质心绕z轴的转动惯量J0=16×105 kg/m2[15],L1=6 m,L2=2.2 m,h=2 m,r=0.5 m,前起落架横向变形的弹性系数k=2×105 N/m,其阻尼系数c=104 N·s/m.飞机3个轮子均接地后的初始速度为55 m/s,航向为跑道正方向.轮子与跑道间的静、动摩擦系数分别为μ0和μ1.
3.1 无侧风时刹车力矩不对称对飞机滑跑的影响
设主起落架两后轮的刹车力矩有一侧失灵.其中,左后轮刹车力矩Mf1=0 N·m,右后轮刹车力矩Mf2=rμ0×1.1×104 N·m,在这种极端刹车力矩不对称的情况下分析飞机滑跑的动力学行为.
图 3~图 5分别给出了刹车力矩不对称时前轮侧向的滑移速度的时间历程图、飞机质心的运动轨迹图和飞机航向角θ的时间历程图.
 |
| 图 3 刹车力矩不对称时前轮侧向滑移速度变化Fig. 3 Lateral slip speed change of front wheel when braking torque is asymmetric |
由图 4和图 5可知,当刹车力矩不对称时,飞机会出现跑偏现象.由图 3可知,当摩擦系数较大时,飞机的跑偏量较小,且前轮与地面之间无侧向滑动;当摩擦系数较小时,跑偏量较大且前轮会出现侧滑现象.当摩擦系数较大时,刹车力矩也较大,导致前轮的地面支撑力较大,因此在摩擦系数较大时前轮会发生无侧滑现象的发生且飞机的滑跑距离也较短.
 |
| 图 4 刹车力矩不对称时飞机质心运动轨迹Fig. 4 Motion trajectory of aircraft mass center when braking torque is asymmetric |
 |
| 图 5 刹车力矩不对称时航向角时间历程Fig. 5 Time history of heading angle when braking torque is asymmetric |
由图 3还可以看出,前轮侧滑现象发生在滑跑的初期.这是由于刚开始滑跑时,飞机的速度较大,受到的阻力和升力均较大,导致前轮的支撑力较小,随着飞机滑跑速度的降低,空气阻力和升力逐步减小,导致前轮的法向支撑力逐步增大,因此在滑跑的后期,前轮的侧滑现象消失.
3.2 刹车力矩对称时侧向风力对飞机滑跑的影响
设风向与y轴成120°时,风速为20 m/s.刹车力矩为Mf1=Mf2=rμ0×1.1×104 N·m.
图 6~图 8分别给出了刹车力矩对称时前轮侧向的滑移速度的时间历程图、飞机质心的运动轨迹图和飞机航向角的时间历程图.
 |
| 图 6 刹车力矩对称时前轮侧向滑移速度变化Fig. 6 Lateral slip speed change of the front wheel when braking torque is symmetric |
由图 6~图 8可知,当摩擦系数较大时,飞机的跑偏量较小,且前轮与地面之间无侧向滑动;当摩擦系数较小时,跑偏量较大且前轮有跑偏现象的发生,随着飞机速度逐步降低,气动升力也逐步减小,前轮的支撑力逐步增大,其侧滑最终消失.
 |
| 图 7 刹车力矩对称时飞机质心运动轨迹Fig. 7 Motion trajectory of the aircraft mass center when braking torque is symmetric |
 |
| 图 8 刹车力矩对称时航向角时间历程Fig. 8 Time history of the heading angle when braking torque is symmetric |
图 9给出了在上述侧风和摩擦系数的情况下,刹车力矩Mf与跑偏量x的关系.从图中可以看出,刹车力矩越小,跑偏量越大;反之,刹车力矩越大,跑偏量越小.其原因是当刹车力矩较小时,前轮的支撑力也较小,易发生侧滑,且滑跑距离较长,因此导致跑偏量较大;当刹车力矩较大时,前轮的支撑力也较大,不易发生侧滑,且滑跑距离较短,因此跑偏量较小.由图 9可知,应根据摩擦系数的大小、跑道的宽度与长度、侧风的大小等因素来确定刹车力矩的取值范围.
 |
| 图 9 刹车力矩对称时刹车力矩与跑偏量的关系Fig. 9 Relationship between Mf and x when braking torque is symmetric |
3.3 对约束方程漂移的修正效果
用Φ2表示系统约束方程列向量Φ的二范数.在刹车力矩对称时侧向风力干扰的算例中,取u0=0.7和u1=0.5的情况,图 10给出了||Φ||2的时间历程图.由图可知,约束稳定化方法有效地抑制了约束漂移.
 |
| 图 10 刹车力矩对称时||Φ||2时间历程Fig. 10 Time history of ||Φ||2 when braking torque is symmetric |
4 结 论
1) 给出了在不对称刹车力矩和侧风载荷作用下飞机在跑道上滑跑的数值仿真.仿真结果表明,不对称刹车力矩和侧风载荷都能引起飞机滑跑跑偏,跑偏量与不对称刹车力矩和侧风载荷的大小正相关.当飞机与地面间的摩擦系数较小时,还会引起飞机前轮的侧滑,侧滑导致飞机滑跑出现较大的跑偏量,并且前轮侧滑现象发生在滑跑的初期.
2) 采用约束稳定化方法,有效地避免了数值仿真时出现约束方程的漂移,保证了数值仿真结果的正确性.数值仿真算例验证了本文给出方法的有效性.
| [1] | Prashant D K. Simulation of asymmetric landing and typical ground maneuvers for large transport aircraft[J].Aerospace Science and Technology,2003,7(8):611-619. |
| Click to display the text | |
| [2] | 晋萍,聂宏. 起落架着陆动态仿真模型及参数优化设计[J].南京航空航天大学学报,2003,35(5):498-502. Jing P,Nie H.Dynamic simulation model and parameter optimization for landing gear impact[J].Journal of Nanjing University of Aeronautics and Astronautics,2003,35(5):498-502(in Chinese). |
| Cited By in Cnki (96) | |
| [3] | 魏小辉. 飞机起落架着陆动力学分析及减震技术研究[D].南京:南京航空航天大学,2005. Wei X H.Dynamic analysis of aircraft landing impact and vibration attenuating techniques[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2005(in Chinese). |
| Cited By in Cnki (24) | |
| [4] | 诸德培. 摆振理论及防摆措施[M].北京:国防工业出版社,1984. Zhu D P.Shimmy theories and anti-shimmy measures[M].Beijing:National Defense Industry Press,1984(in Chinese). |
| [5] | 顾宏斌. 飞机地面运行的动力学模型[J].航空学报,2001,22(2):163-167. Gu H B.Dynamic model of aircraft ground handling[J].Acta Aeronautica et Astronautica Sinica,2001,22(2):163-167(in Chinese). |
| Cited By in Cnki (72) | |
| [6] | 王孝英,诸德培. 飞机操纵前轮转弯运动的数学模型及数值仿真[J].应用力学学报,1997,14(4):46-50. Wang X Y,Zhu D P.Mathematical model and numerical simulation of aircraft's front wheel turning movement[J].Chinese Journal of Applied Mechanics,1997,14(4):46-50(in Chinese). |
| Cited By in Cnki (37) | |
| [7] | Etienne C,Bernd K,Mark L.Analysis of medium-speed runway exit maneuvers[J].Journal of Aircraft,2011,48(5):1553-1564. |
| Click to display the text | |
| [8] | Schiehlen W. Research trends in multi-body system dynamics[J].Multibody System Dynamics,2007,18(1):3-13. |
| Click to display the text | |
| [9] | 航空航天工业部科学技术委员会. 飞机起落架强度设计指南[M].成都:四川科学技术出版社,1989:3-7. Aerospace Industry Science and Technology Commission.Aircraft landing gear strength design guide[M].Chengdu:Sichuan Science and Technology Press,1989:3-7(in Chinese). |
| [10] | 曹建华,白冰如. 飞机构造[M].北京:国防工业出版社,2010:73-80. Cao J H,Bai B R.Aircraft construction[M].Beijing:National Defense Industry Press,2010:73-80(in Chinese). |
| [11] | 梅凤翔. 非完整系统力学基础[M].北京:北京工业学院出版社,1985:80-100. Mei F X.Mechanical basis of non-holonomic system[M].Beijing:Beijing Institute of Technology Press,1985:80-100(in Chinese). |
| [12] | 李为吉. 飞机总体设计[M].西安:西北工业大学出版社,2005:11-16. Li W J.Aircraft design[M].Xi'an:Northwestern Polytechnical University Press,2005:11-16(in Chinese). |
| [13] | 范立钦,周鼎义. 飞机空气动力学[M].西安:西北工业大学出版社,1989:245-254. Fan L Q,Zhou D Y.Aircraft aerodynamics[M].Xi'an:Northwestern Polytechnical University Press,1989:245-254(in Chinese). |
| [14] | Plakhtienko N P,Shifrin B M.Transverse elastic-friction vibrations of a running aircraft[J].International Applied Mechanics,2001,37(5):692-699. |
| Click to display the text | |
| [15] | 刘孟诏. 飞机转动惯量及其估算[J].飞机设计,1997(1):13-20. Liu M Z.Rotational inertia of the aircraft and its estimate[J].Aircraft Design,1997(1):13-20(in Chinese). |
| Cited By in Cnki (5) |