

DOI: 10.11991/yykj.201512014


永磁同步电机(permanent-magnet synchronous motor, PMSM)具有效率高、功率密度大、转动惯量低、结构简单等优点,在机器人、数控机床、航空航天以及新能源领域被广泛地应用[1-2]。然而,永磁同步电机是一个多变量、强耦合、非线性系统,并且PMSM模型不确定的参数、外部负载的扰动等因素使得对PMSM进行有效地精确控制难度加大,
随着PMSM被广泛的应用,对PMSM的转速伺服系统的性能也有了更高的要求,比如受外界扰动后快速准确地响应、系统的鲁棒性等要求。目前,很多学者已经在该方面进行了大量的研究工作,侯艳雪等[3]将神经网络应用在永磁同步电机变频调速系统中,并将单神经元控制器代替了传统的PI控制器,来改善系统的稳定性和动态性能;王庆龙等[4]提出了一种基于双滑模模型参考自适应系统的PMSM无位置传感器控制策略,并分别用于矢量控制系统的速度调节和坐标变换;Dewantoro G等[5]针对PMSM的速度提出利用模糊控制器进行有效控制;Karabacak M等[6]利用非线性Backstepping方法对PMSM转速进行有效控制。
文中采用状态反馈精确线性化控制策略以及结合二次型性能指标的最优控制器,对永磁同步电机转速进行有效地精准控制。首先结合永磁同步电机的数学模型对电机转速的理论基础进行了分析,推导出可进行状态反馈线性化的条件,得出相应的状态反馈精确线性化模型以及输出函数,然后采用二次型性能指标的最优控制器设计方法,通过求解黎卡提方程得到最优控制律。该方法不仅可以提高系统的鲁棒性,而且还改善了系统的动态性能。
1 PMSM建模利用永磁同步电动机d-q轴建立数学模型,以id,iq和ω作为状态变量,永磁同步电动机[7-8]可写为
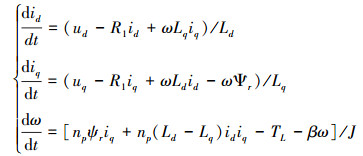
式中:id、iq,ud、uq和Ld、Lq分别是d轴、q轴定子的电流、电压和电感;R1是定子绕组;ω为角频率;Ψr为永久磁通;np表示极对数;TL是负载转矩;β为粘性阻尼系数;J是转动惯量。
经过时间尺度变换以及仿射变换变换后的永磁同步电动机的模型为
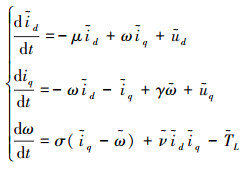
式中:μ、γ、σ、ν分别是系统的结构参数;





 |
(1) |
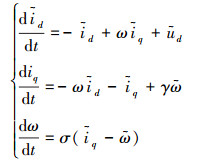
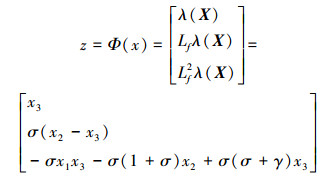
通过适当的选择非线性坐标变换z=Φ(x),以及状态反馈u=α(x)+β(x)v,使得非线性系统在大范围内线性化,甚至在全局内线性化[9-10]。文中选取变换

 |
(2) |
式中: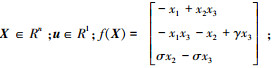

精确线性化的问题在点X0附近是可解的(即存在一个函数λ(X),在X=X0处的关系度是n),当且仅当满足以下条件:
1) 矩阵g(X)adfg(X)···adfn-1g(X)对于在X0处的所有X,其秩不变且等于n。
2) 分布D=spang(X)adfg(X)…adfn-2g(X)在X=X0处是对合的。
首先验证PMSM仿射非线性系统(2)是否满足精确线性化以上条件,由系统(2)得:
 |
(3) |
 |
(4) |
 |
(5) |
由式(5)可知,若-σx3≠0,则矩阵(5)的秩为3,等于该PMSM系统阶数n,即满足精确线性化条件1)。也容易验证g(X)adfg(X)具有形式g(X)adfg(X)=**0T,因为矩阵g(X)adfg(X)g(X)adfg(X)对所有x在X=X0附近有秩为2,即分布D是对合的,所以条件2)也得到满足。
基于以上推论,该PMSM非线性系统(2)可以精确线性化的充要条件为-σx3≠0。
2.3 状态反馈精确线性化设计由于该系统(4)满足精确线性化条件,故可实现状态空间的精确线性化。存在一个输出函数λ(X),使其满足:
 |
(6) |
如若将函数(6)作为输出函数,需有以下事实成立:
 |
(7) |
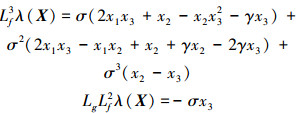
由函数(7)可得:Lgλ(X)=0,LgLfλ(X)=0,LgLf2λ(X)=-σx3≠0(由上述求解该系统(2)可以精确线性化的充要条件可知)。所以,将函数(6)作为输出函数是合理的。
故该PMSM非线性坐标变换z=Φ(x)对应为
 |
(8) |
则在上述坐标下的状态反馈率为
 |
(9) |
式中:
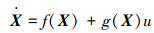
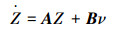
将PMSM非线性系统通过微分同胚的坐标变换成一个完全能控、能观的线性方程,并转化为Brunovsky标准型线性系统:
 |
(10) |
式中:

基于以上对PMSM非线性系统的分析,可知系统输出函数为λ(X)=x3,即为PMSM的转速,故通过控制系统输出函数以实现对转速的控制。上述PMSM非线性系统已转化为Brunovsky标准型线性系统(10),文中利用二次线性系统最优控制的方法来设计控制器[11-13]。选系统(10)的性能指标为
 |
(11) |
式中:Q为半正定加权矩阵;R为正定加权矩阵。
由线性系统(10)以及性能指标(11),根据极值原理,可以导出最优控制率ν*:
 |
(12) |
式中:K为最优反馈增益矩阵,K=R-1BTP;P为正定矩阵,需满足黎卡提(Riccati)矩阵方程:ATP+PA-PBR-1BTP+Q=0。
根据二次线性系统最优控制原理可得
 |
(13) |
 |
(14) |
根据式(9)和式(13)可以得出该系统的状态反馈率为
 |
(15) |
根据式(14)、(15)控制率设计控制器如图 1所示。

|
| 图 1 永磁同步电动机状态反馈控制系统框图 |
为了验证上述永磁同步电动机状态反馈控制模型与方法的有效性,文中利用MATLAB环境下的Simulink对所述模型进行仿真。所选永磁同步电动机的参数为:σ=6,γ=4;永磁体采用面装式,Ld=Lq,μ=1。设定电动机的不同转速ν1=700 rad/s,ν2=1 000 rad/s,TL=0。同时,需注意精确线性化的充要条件-σx3≠0。为了更好地体现该系统的动态性能,在1 s处对系统施加宽度为0.1 s,幅值为2的持续扰动信号,在不同的转速下对系统进行仿真,得出状态响应曲线图如图 2所示。在同样的数学模型下采用了传统的PI控制方法得出的永磁同步电机的状态响应曲线如图 3所示。

|
| 图 2 最优控制时永磁同步电动机状态响应曲线 |

|
| 图 3 PI控制时永磁同步电动机状态响应曲线放大图 |
从图中可以看出,采用传统的PI控制方法反应较慢,出现较大的波动,而采用本文所述方法系统对外部输人变化的反应是较快,对扰动具有一定的抑制能力,具有较好的鲁棒性,系统的动态特性明显得到改善。
5 结束语文中针对基于最优控制的永磁同步电机转速控制进行研究,利用微分几何方法和最优控制理论实现对永磁同步电机速度的精确自调节控制,增加系统鲁棒性和改善系统的动态性能,并针对该方法进行仿真验证,并与同一数学模型下,采用传统的PI控制方法进行仿真对比。结果表明,系统采用状态反馈精确线性化控制策略和设计最优控制器的方法具有更好的稳定性和鲁棒性,系统的动态特性也明显得到改善。
| [1] | 孔小兵, 刘向杰. 永磁同步电机高效非线性模型预测控制[J]. 自动化学报 , 2014, 40 (9) : 1958-1966 |
| [2] | 杨书生, 钟宜生. 永磁同步电机转速伺服系统鲁棒控制器设计[J]. 中国电机工程学报 , 2009, 29 (3) : 84-90 |
| [3] | 侯艳雪, 黄曼磊, 陶丽楠, 等. 神经网络在永磁同步电机变频调速系统中的应用[J]. 应用科技 , 2015, 42 (2) : 1-4 |
| [4] | 王庆龙, 张兴, 张崇巍. 永磁同步电机矢量控制双滑模模型参考自适应系统转速辨识[J]. 中国电机工程学报 , 2014, 34 (6) : 897-902 |
| [5] | DEWANTORO G, KUO Yonglin. Robust speed-controlled permanent magnet synchronous motor drive using fuzzy logic controller[C]//Proceedings of the 2011 IEEE International Conference on Fuzzy Systems (FUZZ). Taipei, China: IEEE, 2011: 884-888. |
| [6] | KARABACAK M, ESKIKURT H I. Speed and current regulation of a permanent magnet synchronous motor via nonlinear and adaptive backstepping control[J]. Mathematical and computer modelling , 2011, 53 (9/10) : 2015-2030 |
| [7] | 孟昭军, 孙昌志, 安跃军, 等. 状态反馈精确线性化永磁同步电动机转速控制[J]. 电机与控制学报 , 2007, 11 (1) : 21-24 |
| [8] | BAI Shan, ZHANG Erwei. Based on the model of the DQ axis permanent magnet synchronous motor MPC[C]//Proceedings of the 2011 International Conference on Electronics and Optoelectronics (ICEOE). Dalian, China: IEEE, 2011, 3: V3-224-V3-226. |
| [9] | ISIDORI A. Nonlinear control systems[M]. 3rd ed London: Springer, 1995 : 26 -67. |
| [10] | 李健, 李全国. 永磁同步电机模型的精确线性化[J]. 暨南大学学报:自然科学版 , 2011, 32 (3) : 266-269 |
| [11] | 高德欣, 杨晓燕. 受扰动非线性系统的反馈线性化最优控制[J]. 化工自动化及仪表 , 2010, 37 (8) : 19-22 |
| [12] | 耿强, 夏长亮, 王志强, 等. 永磁同步发电机与Boost斩波型变换器非线性速度控制[J]. 电工技术学报 , 2012, 27 (3) : 35-43 |
| [13] | GUO Hong, XU Jinquan, KUANG Xiaolin. A novel fault tolerant permanent magnet synchronous motor with improved optimal torque control for aerospace application[J]. Chinese journal of aeronautics , 2015, 28 (2) : 535-544 DOI:10.1016/j.cja.2015.01.008 |