

DOI: 10.11991/yykj.201604007


2. College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China
为提高作业精度和安全性、节约经济成本,深海作业的钻井平台和运输大型海洋结构物的半潜式自航运输船等大多数的船舶或平台都要配备动力定位系统 (dynamic positioning system,DP),近年来随着海洋油气开发的广泛需求,动力定位技术也越来越多地受到关注,我国动力定位技术自主化研究也逐渐展开。
文中建立了半潜船低频运动数学模型以及风载荷、流载荷和波浪漂移力作用下的海洋环境干扰模型。在此基础上对半潜式自航工程船的动力定位运动过程进行了仿真,分析了其动力定位能力,通过实验验证了模型的正确性。
1 基本假设和坐标系为研究物体运动必须建立表达其运动的坐标系,文中建立水平的随船坐标系,在基本假设下针对5万载重吨半潜式自航工程船建立相关的运动模型[1]。
1.1 基本假设为了把复杂的物理世界用数学公式描述, 文中作如下基本假设:
1) 假设海面是惯性参考系, 即假设地面坐标系为惯性坐标系;
2) 忽略地球曲率, 把海面看成平面;
3) 重力加速度、大气密度以及海水密度恒定;
4) 该船体是刚体, 且质量为常数;
5) 该船体是以舯纵剖面对称的。
1.2 坐标系的建立及坐标间的转换为了便于定量地描述船体的运动, 文中建立了水平的随船坐标系如图 1所示。它包括固定坐标系、随船运动坐标系和随船平动坐标系3个坐标系。

|
| 图 1 水平的随船坐标系 |
1) 固定坐标系E-ξηζ
E是任意选定的,固定于地球表面,通常可选择在某一时刻 (t=0时) 船体重心G所在位置。Eξ轴在静水面内,其方向一般选在船纵向运动方向上,考虑风浪流时指向正北方向;Eη轴选择为Eξ轴在静水面内顺时针旋转90°的方向上;Eζ轴垂直于静水面,以指向地心为正。
2) 随船运动坐标系G-xyz
把原点取在重心G上。Gx、Gy、Gz分别为经过G的水线面、横舯剖面和纵舯剖面的交线。正方向按右手系的规定,即Gx向首、Gy向右、Gz向下。
3) 随船平动坐标系G-XYZ
该系与一般的随船运动坐标系的区别是,它不随船作纵摇和横摇,将6自由度运动分成水平面内的操纵运动、横向的横摇运动和纵向的纵摇升沉运动,兼顾了船舶操纵性、动稳性和耐波性。
半潜船运动的坐标系如图 1所示,船在空间的位置取决于随船运动坐标系G-xyz原点G在固定坐标系E-ξηζ中的3个坐标分量ξ0、η0、ζ0以及随船运动坐标系对于固定坐标系的3个姿态角ψ、θ、φ。这3个空间姿态角重新定义如下:
艏向角ψ——船体Gx轴在水平面ξEη上的投影与Eξ轴之间的夹角,也是平动随船坐标系Gx轴与Eξ轴之间的夹角;
纵倾角θ——船体Gx与水平面ξEη之间的夹角;
横倾角φ——船体对称面xGz与通过Gx轴的铅垂面xGζ之间的夹角;
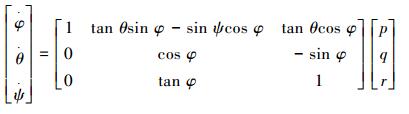
利用各坐标系之间的关系, 通过简单的计算可得如下转换关系。固定坐标系E-ξηζ和随船坐标系G-xyz之间速度转换关系为

角加速度之间转换关系为
随船平动坐标系G-XYZ和随船运动坐标系G-xyz之间的转换关系为
2 半潜船低频运动数学模型建立
船舶运动模型包括6个自由度[2](3个平移运动和3个旋转运动),但船舶动力定位主要研究的是海上浮式结构物在水平面的运动,即纵荡、横荡和艏摇3个自由度的运动。一般情况下,由于定位时半潜船的速度很小v≈0,且横摇角和纵摇角很小,这意味着非线性科里奥利向心力、阻尼力、恢复力、浮力和力矩都可以在v≈0和φ=θ=0处线性化,因此,3自由度半潜船的低频运动模型可表示为[3]
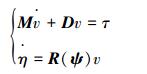 |
(1) |
式中:R(ψ) 为简化的转换/旋转矩阵;MRB为质量矩阵;MA为附加质量矩阵;D为水动力系数矩阵以及式 (1) 中的R(ψ) 描述为
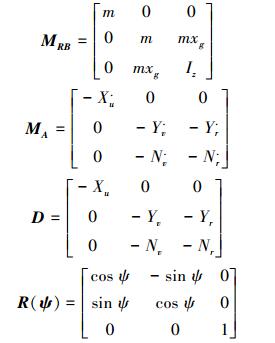
为了便于实时解算半潜船的运动信息,将纵荡、横荡和艏摇的运动方程表示成如下状态方程形式:
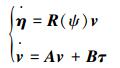
式中:
半潜船在海洋上航行或作业时,之所以要配备动力定位系统来辅助工作是因为船体会受到外界干扰载荷的影响,导致船体偏离航线、移动。外界环境干扰主要来自海风、海浪和海流三大部分[4]。船东通常会提出动力定位系统能够达到抵抗相应等级的海风、海浪和海流的精度要求。因此,快速、准确地计算出海洋环境干扰力是整个动力定位系统中十分关键的一个环节。
3.1 风载荷计算一般情况下,在对船体所受风载荷进行计算时,研究人员会将船体所受的风简化为均匀风,因为风的大小和方向是随时间而变的,且毫无任何规律,并且海面上的风与地面上的风还是有所不同的,陆地上的风可通过风传感器测得,并且在各个高度上相差不多,可是风在海平面同时受到海浪影响,所以海平面上的风在高度上也是分布不均的,而由于风传感器数目所限,所以不能测得各个高度上的准确风载荷[5]。
模块法的原理是将整个结构体划分成众多的、不同的标准构件,划分成小的模块,在已知各个构件的载荷特性和影响因素的条件下,分别对各个小的构件模块进行载荷的计算,最后,再将所有结果叠加,得到大构件在此时的总载荷。上文提到,计算用到的风是简化后的均匀风,其大小采用作业海域内距海平面20 m处的平均风速,计算公式为[6]

式中:Fw表示风载荷,单位为N;Cw的值为0.615 N·sec2/m4;Cs表示形状系数;Ch表示高度系数;A表示承受风载荷构件的投影面积,单位为m2;Vw表示设计风速的分量,单位为m/s。
Vw为海面以上20 m处的风速,该风速可以通过实地检测获得,但是由于半潜船作业地点未知,每次作业前再前往测得的想法不现实,所以可以采用一些风谱 (如P-M) 给出的风速,再根据式 (2) 进行相应高度的风速的计算[7]:
 |
(2) |
式中:Z表示距离海平面的高度;Vz表示距离海平面Z处风速;V20表示距离海平面20 m处风速。
在纵向、横向、艏向3个方向,根据不同的形状系数和高度系数针对各个构件计算相应的风载荷后,累加得到结构的总受力:
结构的总力矩:
式中:Fwi表示第i个构件所受的风力;Xi表示第i个构件据参考点的距离。
需要指出的是,采用该算法计算风载荷其结果偏于保守。海平面的自然风无论大小还是方向都要复杂得多,该方法比实际情况存在一定的简化计算,如果想要得到精确的构件风载荷,还需进行相关的风洞试验,不过建造成本也将会剧增,但是从安全性的角度考虑如果条件允许最好进行风洞试验,并且要加入对构件遮蔽影响的考虑[8]。
3.2 流载荷计算对类似半潜式自航工程船的船型,API规范推荐采用《VLCC风载荷和流载荷估算》进行计算。其风压系数数值基于1960年在密歇根大学开展的风洞实验计算得到,而流载荷系数数值由1975~1991年在荷兰MARIN水池进行的船模实验和美国海军部设计手册整理得到。在对流载荷的研究中,考虑到了以下因素:舭龙骨对流力系数的影响;船长/型宽比 (也即修长度) 对流力系数的影响;船艏形状对流力系数的影响及流速剖面对流力系数的影响[9]。
船艉规定为0°,船艏规定为180°,与我们通常规定不同的是,船的左舷为横轴正方向,右舷为0°~180°,各个系数也仅给出0°~180°期间的数值,181°~360°(0°) 期间的数值要通过插值计算来获得。计算时,应该注意2个方向值的正负号,否则将得到相反的数值。海流其实包含很多种,如潮流、地转流等,但是流对船体的影响比风和浪小得多,相对稳定,变化不大,因此在对流进行计算时,一般假设流速为常值,且深度越深、流速越小,考虑船体吃水深度变化不大,因此可忽略流速随深度递减因素的影响,视为常值。
然后用式 (3) 计算流载荷[10]:
 |
(3) |
式中:FXc、FYc、MXYc分别为纵向、横向流载荷及艏摇力矩;CXc、CYc、CXYc分别为纵向、横向流载荷系数及艏摇力矩系数;ρ表示海水密度,单位为1 025 kg/m3;Vc表示流速,单位为m/s;LBP表示垂线间长,单位为m;T表示吃水深度,单位为m。
3.3 波浪漂移力计算二阶波浪力的干扰会引起船体的漂移,漂移会使得船舶的航向和轨迹随时间的变化而变化。这种变化的频率远低于一阶波浪导致的船舶振荡的频率,这种二阶波浪力包括二阶定常漂移力、低频力及高频力[11]。获得波浪二阶波浪漂移力的方法主要有2种,2种方法各有优缺点,一是理论计算,优点是省时省力,缺点是结果通常不是很理想;二是实物模型的水池实验,优点是结果较为准确,缺点是制作实物模型费时费力。目前研究二阶漂移力的理论方法主要有近场方法、中场方法和远场方法[12]。根据以上3类方法形成了比较完善的商业水动力计算软件包括harp、AQWA、HydroStar及SeaSam等。
研究船舶在随机海浪作用下的运动特性时,想要实现对真实海浪的模拟,就必须寻找与之相似的波浪,通常情况下会选择长峰波。在软件中采用谱分析方法计算波浪二阶漂移力。使用时用户需要选定波浪谱密度函数并导入纵荡、横荡、艏摇的二阶传递函数。
波浪谱密度又称为能量谱,波浪谱密度函数S(ω) 既能用来分析平稳随机过程的频率,又能表示在这种频率下,不规则波的波浪能量是如何分布的。
由于单参数谱不能合理地表征非充分发展海浪的特征,第12届ITTC (International Ship Structure Congress) 推荐用有义波高和特征周期作为波谱参数的双参数波谱[13]:
式中:特征周期T1的单位为s;Sζ(ω) 的单位为m2s。由于T1近似于海浪的平均周期T0,所以也可用T0代替T1。
由于波浪的不规则性,所以计算慢漂力时必须想办法将不规则波转化为若干谐波[14],然后再通过叠加计算最后得到该波浪下的二阶力和力矩,通常按照波频ωj和波幅Aj的不同,等间距的将波浪谱划分成N份,然后按照式 (4) 进行相关计算[15]:
 |
(4) |
式中RAO代表幅频响应算子。
4 仿真实验验证及分析为验证文中提出的运动模型,在MATLAB下实现了半潜船的低频运动模型和环境干扰模型,并采用PID控制方法和基于目标函数优化的推理分配策略,进行了半潜船动力定位仿真试验。
4.1 试验工况和参数设置以距海平面高20 m处、风速15节为例,计算半潜式自航工程船的外载荷,仿真实验模拟了3种典型的工况,其中第1种工况的具体参数设置见表 1。
| 项目 | 设定值 |
| 控制方式 | PID+Kalman滤波 |
| 定位初始位置 (大地坐标系) | Xst=0 m,Yst=0 m,ψst=0 deg |
| 定位初始速度 (大地坐标系) | Vx=0 m/s,Vy=0m/s,Vψ=0 deg/s |
| 定位目标位置 (大地坐标系) | Xtar=10 m,Ytar=10 m,ψtar=90 deg |
| 定位精度要求 (大地坐标系) | ΔX=20 m,ΔY=20 m,Δψ=5 deg |
| 运动方向的优先控制 | 同样重要 |
| 控制系统时间延迟 | 3 s |
| 模拟时间 | 900 s |
4.2 实验的结果及数据处理
经过与仿真系统的联机和调试,根据此程序对半潜工程船的动力定位系统进行相应的动态模拟,对其定点能力和复位能力分析进行时域动态分析。在此,单个推力器的上限取为设计极限推力的90%。对半潜工程船的动力定位系统动态模拟的结果包括船舶低频运动时历和定位精度信息。
图 2分别为对应上述工况的船舶水平低频运动的时历及轨迹曲线图。由于初始推力为零,推力逐渐增大,船舶经过一段时间后运动趋于动态稳定状态,在小范围内做往复运动,如图 3所示。从水平运动时历曲线和轨迹图可以看到船舶在600 s左右达到目标位置然后继续返回到原点。可以看出,船舶此时能够保持有效定位,定位的精度足以满足要求,有着很高的定点能力。取稳定后的横纵位移以及艏摇角度进行分析,考虑其动力定位的能力。

|
| 图 2 船舶水平运动时历曲线和轨迹 |

|
| 图 3 稳定状态下的纵移、横移和艏向 |
稳定状态下的最大横纵位移、最小横纵位移以及最大最小艏摇角度如表 2。
| 项目 | 最小值 | 最大值 | 平均值 | 标准差 |
| 纵向位移/m | 9.787 | 10.393 | 10.090 | 0.124 |
| 横向位移/m | 9.845 | 10.155 | 10.000 | 0.049 |
| 艏摇角度/(°) | 89.889 | 90.695 | 90.292 | 0.295 |
4.3 仿真结果分析
计算结果的误差在工程允许范围内,满足作业精度要求。文中所建立的运动模型和外载荷模型与半潜式自航工程船的控制系统配合完成PID控制方法和基于目标函数优化的推力分配策略下的半潜船运动控制,完成对控制方法和推力分配策略的验证功能。控制系统能够在各种工况下完成定位目标,控制船舶在合理的时间内完成作业,行驶至期望位置,精度满足工程作业要求,在目标位置的往复震荡不会影响具体的工作。
5 结束语文中分析并建立了研究半潜式自航工程船运动模型和动力学模型的坐标系统—固定坐标系、随船运动坐标系和随船平动坐标系,在此基础上,建立了半潜船的运动数学模型以及控制系统需要的状态空间形式的运动模型。采用模块法,对影响半潜船的海风、海浪、海流等外界干扰载荷进行了计算,仿真试验表明,计算结果的误差在工程允许范围内,满足作业精度要求。
| [1] | 吉春正. 风浪流环境中滑行艇操纵性研究[D]. 哈尔滨: 哈尔滨工程大学, 2007: 13-32. |
| [2] | FOSSEN T I. Marine Control Systems:Guidance, Navigation, and Control of Ships, Rigs and Underwater Vehicles[M]. AS, Trondheim, Norway: Marine Cybernetics, 2002. |
| [3] | 王芳, 万磊, 徐玉如, 等. 深水半潜式钻井平台动力定位建模与仿真[J]. 船舶工程, 2011, 33(3): 75-78 |
| [4] | 李殿璞. 船舶运动与建模[M]. 哈尔滨: 哈尔滨工程大学出版社, 1999: 1-90. |
| [5] | 吴宝昌. 深海半潜平台动力定位系统模型试验设计与分析[D]. 哈尔滨: 哈尔滨工程大学, 2012: 25-62. |
| [6] | 陈新权. 深海半潜式平台初步设计中的若干关键问题研究[D]. 上海: 上海交通大学, 2007: 35-84. |
| [7] | 马作师. 动力定位船舶控制系统设计与研究[D]. 武汉: 武汉理工大学, 2011: 1-20. http://www.cnki.com.cn/Article/CJFDTotal-CBZZ201502006.htm |
| [8] | 时丽丽. 现代船舶动力定位系统的建模研究[D]. 广东: 广东工业大学, 2011: 1-29. |
| [9] | 曹明强, 王磊, 王亮. 深水半潜平台海流载荷试验分析[J]. 实验室研究与探索, 2009, 28(8): 26-29 |
| [10] | Api Recoommended Practice 2sk. Design and analysis of stationkeeping systems for floating structures[S]. 2005: 30-36. |
| [11] | SMALLWOOD D A, WHITCOMB L L. Model-based dynamic positioning of underwater robotic vehicles: theory and experiment[J]. IEEE journal of oceanic engineering, 2004, 29(1): 169-186 DOI:10.1109/JOE.2003.823312 |
| [12] | 乔晓国. 深水浮式结构动力定位能力动态分析[D]. 哈尔滨: 哈尔滨工程大学, 2010: 1-42. |
| [13] | MORGAN M J. Dynamic Positioning of Offshore Vessels[M]. [S.I.]: Petroage Pub Co, 1978: 217-232. |
| [14] | 陈红丽. 基于模型预测控制的动力定位控制系统研究[D]. 哈尔滨: 哈尔滨工程大学, 2012: 51-74. |
| [15] | 王磊, 王先福, 杨建民. 动力定位船舶二阶低频慢漂力模型试验研究[C]//第七届全国水动力学学术会议暨第十九届全国水动力学研讨会论文集 (下册). 哈尔滨: 中国造船工程学会, 2005: 689-694. |