

DOI: 10.11991/yykj.201603009


2. College of Automation, Harbin Engineering University, Harbin 150001, China
温控控制系统大惯性环节的特性,会产生降低控制系统响应速度、增大输出超调量和降低系统稳定性等问题。如PID温度控制器,在没有准确建立控制系统模型时[1],会由于这些问题直接影响控制器的控制效果。
针对温度控制系统超调和稳态误差大等问题,国内外学者开展了广泛的应用研究。文献[2]提出了一种基于模糊PID控制器的温度控制方法,可以在被控对象精确数学模型未知的情况下进行温度控制,但是系统输出的稳态误差不够理想。文献[3]针对温度控制中的滞后性,在系统反馈通道中加入Smith预估器,通过Smith预估器补偿系统延时参数,使系统特征方程不再含有滞后环节,同时利用Smith预估器实时地估计系统的动态误差,使得系统的动态过程及稳定性得到明显改善。文献[4]指出Smith预估器对被控对象数学模型依赖程度很大,即被控对象模型参数与Smith预估器参数之间一旦存在误差,将导致系统动态性能及稳定性变差,甚至恶化。相比较Smith预估器,Dahlin控制器对被控对象数学模型参数误差的敏感度较低,即模型参数误差在合理范围内,Dahlin控制器对被控对象均会实现有效控制,如文献[5]提出了一种基于Dahlin控制器的控制算法。文献[6]中采用Dahlin控制器,并将其应用到医疗输液加热系统的控制中,但没有给出如何得到被控对象数学模型的过程,只是凭借经验给出被控对象的相应参数。
因此,本文提出了一种将Fminsearch的参数辨识技术和Dahlin控制算法相结合的时滞系统控制方法。基于无约束非线性规划函数Fminsearch,准确辨识出被控对象的惯性参数和时滞参数,在此基础上,基于Dahlin控制器实现精确修正温度控制量,达到提高温度控制的稳定性和实时性,并降低系统超调量和稳态误差的目的。
1 时滞系统分析及Dahlin控制算法 1.1 时滞对系统控制的影响分析由于纯滞后环节的存在,导致常规PID控制器的输入需要经过一段延迟时间后才能在输出响应中表现出来。在这段延迟时间里由于输入而产生的系统输出还没有响应,比例、积分和微分环节一直感知不变的偏差信号,导致的结果是PID控制器对被控对象产生带有较大偏差的控制量,当系统检测到控制量过大再进行调节时,系统控制品质已经急剧变坏。而由于控制作用不及时,导致系统产生较大的超调和振荡,这就是常规PID控制对时滞系统控制效果不理想的根本原因。
以模型Gp(s)=e-2s/(10s+1)为例,将滞后时间τ0分别取2、4、6、8、10 s,进行比对仿真分析,仿真曲线如图 1所示。

|
| 图 1 不同延迟时间对应的系统阶跃响应曲线 |
由图 1可知,随着延迟时间的不断增大,系统超调量在逐渐变大并伴随着振荡产生。因此,延迟环节是影响时滞系统控制效果的一个重要因素。
通过准确记录系统启动时间,图 2给出了基于光纤陀螺控制箱体的时滞系统特性分析图。由图可知,温度响应过程存在明显的滞后性。且由于滞后特性的存在,导致温度控制存在较大的超调。

|
| 图 2 常规PID控制下的温度响应曲线 |
Dahlin控制器能通过适当地调节控制器参数,减小系统的稳态误差,降低系统的超调量,提高系统的稳定性。因此,在解决时滞系统中存在超调量大、稳定性差等问题起到了显著作用[7]。
图 3给出了基于Dahlin控制器的时滞系统结构框图。

|
| 图 3 Dahlin控制系统结构 |
图中,Gp(s)为被控对象传递函数,其归一化形式为Gp(s)=e-τ0s/(Tps+1),Gp(z)为基于零阶保持器变换的被控对象离散表达式,Gc(z)为Dahlin控制器。R(z)、E(z)、U(z)、Y(z)分别为被控系统输入量、系统输入与输出的差值、Dahlin控制器输出的控制量和系统输出量。
Dahlin控制器设计的核心思想是将闭环传递函数假设成一阶惯性环节与滞后环节串联的形式,即
 |
(1) |
式中:T为闭环系统时间常数,τ为延迟时间。
基于系统闭环传递函数Φ(s),以及对Φ(s)和GP(s)的离散化,由图 3可计算得到基于Dahlin控制器的系统闭环传递函数离散表达式:
 |
(2) |
由式(2)可得Dahlin控制器传递函数的离散表达式为
 |
(3) |
对Gp(s)和Φ(s)进行离散化,并代入式(3),可得Dahlin控制器的系统闭环传递函数离散表达式的具体形式[8]:
 |
(4) |
式中TS为采样周期,TS与被控对象纯延迟时间τ0的关系为τ0=NTS,其中N是正整数。
对式(4)做进一步简化可得
 |
(5) |
式中:
由式(5)可以看出,设计Dahlin控制器的关键在于精确辨识出被控对象的模型参数Tp和τ0及准确选取系统闭环传递函数参数T和τ。
2 基于Fminsearch的系统参数辨识Dahlin控制器是基于被控对象模型设计的,因此系统参数辨识是完成控制算法设计的重要步骤。参数辨识的好与坏将直接影响控制器的性能。基于非线性规划函数Fminsearch的辨识方法,能对被控对象模型参数进行精确辨识,非常适合时滞系统的参数估计。在针对时滞温度系统模型参数辨识方面,基于Fminsearch的系统参数辨识技术原理相对简单,辨识精度较高。与基于BP神经网络时滞系统参数辨识过程相比,在辨识精度基本一致的情况下,后者步骤过于复杂不易实现[9];采用基于多项式函数对温度曲线拟合进行模型参数辨识时,虽然辨识过程容易实现,但辨识精度较差。基于此,针对时滞温度系统数学模型采用了基于Fminsearch的参数辨识方法。
2.1 时滞系统的差分形式归一化处理采用Fminsearch对被控对象模型参数辨识时,需要首先将被控对象模型归一化为适合Fminsearch的通用形式。

|
| 图 4 被控对象结构 |
图中u(k)为控制量,e(k)代表系统干扰噪声。
将被控对象的离散脉冲传递函数作进一步简化,可以得到:
 |
(6) |
式中:c1=e-TS/Tp,d1=1-e-TS/Tp。
结合图 4,将式(6)写成差分方程形式:
 |
(7) |
 |
(8) |
式中:Φ=[y(k-1) u(k-N-1)]T,θ=[c1 d1]T。
2.2 基于Fminsearch的时滞系统参数辨识对于Dahlin控制器而言,被控对象的数学模型必须精确已知才能得到理想的控制器参数。所以进行参数辨识就是为了寻找一组最佳的数据值与系统模型匹配。
假设测得一组温度数据:被控对象初始温度值t0和温度测量输出值yi,i=1,2,…,N。满足这组数据的温度模型为ŷ=f(τ,T,K,t0),其中τ和T是需要辨识的温度模型参数。差值最小化函数为J,其表达式如下:
 |
(9) |
式中:yi为温度测量值,ŷi为所建立的温度模型描述的温度值。
参数辨识的目标是求出待定参数τ、T、K使函数J最小,即
 |
(10) |
由式(10)可知,进行参数辨识时需要各部分残差平方和最小才能合理、精确地反映数据的基本趋势,最终得到温度系统模型参数的精确值。一旦差值最小化函数J在设定条件下没有达到最小值,无法得到精确的系统模型参数值,导致所设计的Dahlin控制器无法对时滞温度系统进行精确控制。在采用Fminsearch函数进行温度曲线拟合时不要求拟合曲线一定通过数据点,所以基于非线性规划函数的辨识算法本质上是一种局部寻优的方法[10]。
如果已知k组输入输出数据u(k),y(k),k=1,2,…,N+n,并将其代入式(10)中可以得到由n个方程组成的方程组,其矩阵形式为
 |
(11) |
式中:
取误差函数为
 |
(12) |
基于此,可以得到正则方程式:
 |
(13) |
由式(13)可以得到被辨识参数的表达式:
 |
(14) |
以光纤陀螺温度控制系统为分析对象。图 5为光纤陀螺温控设备在21.6 ℃初始温度环境下进行参数辨识的结果。

|
| 图 5 温度曲线辨识结果 |
通过图 6对比曲线可以看出,本文所采用的辨识算法对温度曲线的拟合效果明显优于多项式拟合,稳态时的拟合误差要远小于多项式的拟合误差。所提出的辨识算法对时滞系统模型参数辨识的精度更高,有利于Dahlin控制器对被控对象的精确控制。

|
| 图 6 温度曲线辨识误差 |
由辨识算法得到光纤陀螺温控系统归一化传递函数为
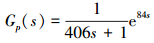 |
(15) |
由该数学模型即可得到被控对象相应的参数:时间常数Tp=406 s,滞后时间常数τ0=84 s。
3 Dahlin控制器实现 3.1 采样周期的设计变对于温度控制系统而言,无论采用补偿控制还是传统的PID控制算法,采样周期选择的合适与否都会直接影响到控制器的控制效果[11]。根据闭环传递函数时间与采样周期之间的关系:TS=0.125~0.25τ0、τ0=NTS,可以得到采样周期的数值:12 、14 和21 s。
从图 7可以看出,当采样周期TS=14 s时控制系统可以得到比较理想的阶跃响应曲线。所以仿真验证时,采样周期选取 TS=14 s。

|
| 图 7 不同采样周期TS所对应的控制系统阶跃响应曲线 |
构造Dahlin控制器的关键在于闭环时间常数T以及延迟时间τ的选取。参数T和τ选取的好与坏将直接影响控制器的性能。
根据Dahlin算法可知,闭环传递函数的延迟时间应该与被控对象的延迟时间相等[12],即τ=τ0,所以τ=τ0=84 s。
通常情况下,若闭环传递函数时间常数T选取不合理,Dahlin控制器会产生振铃现象。振铃现象是指Dahlin控制器输出以采1/2样频率波动。虽然振铃现象对系统输出几乎不会有影响,但会对执行机构带来一定程度的损害[13]。因此,在设计Dahlin控制器时,对执行机构采用一定的保护措施,从而可以忽略振铃现象的影响。
在选取闭环传递函数时间常数时,T值太小系统由于调整过快容易出现振荡;T值过大系统稳定性会增强,但会造成响应速度变慢。所以先初步确定T的取值范围:0.3τ0~0.5Tp,然后通过仿真选取合适的T值[14]。图 8给出了不同时间常数T所对应的控制系统阶跃响应曲线。由图可以看出,当闭环时间常数T=25 s时,系统的阶跃响应区曲线响应速度快且无振荡出现。

|
| 图 8 不同时间常数T所对应的控制系统阶跃响应曲线 |
将被控对象时间常数Tp=406 s、闭环时间常数T=25 s、采样时间TS=14 s代入到式(6)中,得到Dahlin数字控制器的数学模型为
 |
(16) |
由式(16)可以得到Dahlin控制器的差分方程表达式:
 |
(17) |
式中:a0=12.65、a1=12.22、b1=0.571 2、b2=0.428 8,u(k)为Dahlin控制器的输出量,e(k)为温度设定值与被控对象输出的差值,N由表达式τ=NTS求出,且为正整数。
4 仿真验证根据图 3搭建系统模型,在Simulink环境下采用阶跃信号作为激励函数对时滞系统进行仿真研究。图 9是采样周期选为TS=14 s时得到的被控系统阶跃响应曲线。由响应曲线可以看出:被控系统基本无超调产生,稳态误差基本为零,所设计的Dahlin控制器满足被控系统的闭环响应。

|
| 图 9 被控系统的阶跃响应曲线 |
由图 10可以看出,常规PID控制、Dahlin控制、Smith预估控制的响应曲线在超调量、稳态误差、延迟时间等性能指标还是有明显区别的。

|
| 图 10 响应曲线对比 |
| 控制器类型 | 超调量/% | 稳态误差/% | 延迟时间/s |
| PID控制器 | 15.97 | 0.25 | 98 |
| Smith预估控制器 | 0 | 0.40 | 14 |
| Dahlin控制器 | 0 | 0 | 98 |
由表 1可以看出,和PID控制响应曲线相比,基于Dahlin控制的温度响应曲线在超调量和稳态误差上都得到了一定改善,响应曲线无震荡出现并且进入稳态;由于Smith预估器引入一个预估补偿环节,从而使系统闭环特征方程中不含纯滞后项,被控系统的滞后时间要小于基于Dahlin控制的系统滞后时间。另外被控系统基本无超调产生,但是基于Dahlin控制的温度响应曲线要早于Smith预估控制系统进入稳定状态,响应速度更快[15]。
5 结论本文针对时滞温度系统先以无约束非线性规划函数fminsearch对温度系统模型参数进行精确辨识,再针对辨识得到的精确模型参数值设计Dahlin控制器,实现对时滞温度系统的精确控制。
1)采用无约束非线性规划函数Fminsearch可以精确辨识出时滞温度系统数学模型参数的精确值。
2)利用Fminsearch函数辨识得到的时滞温度系统数学模型参数值进行Dahlin控制器设计,当合理地选择控制器参数后,时滞温度系统的超调量及稳态误差得到了很好的控制。
3)针对时滞温度系统的控制时,与传统PID控制器、Smith预估控制器相比,Dahlin控制器在降低系统超调量及消除稳态误差的效果更好。
文中给出的仿真实例说明了基于Fminsearch的时滞系统Dahlin控制方法的有效性,对于推动Dahlin控制方法在工程中的广泛应用具有重要意义。另外,本文所采用的基于无约束非线性规划函数Fminsearch的参数辨识方法仍然是一种离线辨识,还不能对系统模型参数进行实时修正。在日后的学习中,还需要继续对以温度系统为代表的时滞系统参数辨识方法做深入探索和研究。
| [1] | 李银伢, 盛安冬, 王远钢. 参数不确定时滞系统的鲁棒PID控制[J]. 控制与决策,2004, 19 (10) : 1178 –1179. |
| [2] | CONG Menglong, XU Wenjia, WANG Yiding. Design of temperature controller for laser diode based on DSP and Fuzzy-PID control[C]//International Conference on Electrical and Control Engineering. Wuhan, China, 2010:786-788. |
| [3] | 张连会.基于Smith预估器的模糊PID温度控制算法研究[D].哈尔滨:哈尔滨工业大学, 2012:10-13. |
| [4] | 潘峰, 韩如成. 时变大时滞系统的控制方法综述[J]. 仪器仪表学报,2012, 23 (3) : 789 –790. |
| [5] | ZHANG Zhigang, ZOU Benguo, BI Zhenfu. Dahlin algorithm design and simulation for time-delay system[C]//2009 Chinese Control and Decision Conference. Guilin, China, 2009:17-19. |
| [6] | YANG Xiaolin, DU Yuren, ZHAN Li. A medical infusion heating system based on Dahlin algorith[C]//International Conference on Information and Automation. Zhangjiajie, China, 2008:20-23. |
| [7] | 张智军. 基于Dahlin控制算法的温度控制器设计[J]. 工业控制与应用,2011, 30 (6) : 13 –16. |
| [8] | 王晓华. 高精度温箱温度控制系统设计[D]. 西安:西安工业大学, 2013:25-30. |
| [9] | LI Qiang, XU Ziyang.Parameter identification method research based on the BP neural network and space search[C]//International Conference on Advances in Materials Science and Information Technologies in Industry. Xi'an, China, 2014:786-788. |
| [10] | 潘峰, 韩如成. 时变大时滞系统的参数辨识仿真研究[J]. 计算机仿真,2013, 30 (3) : 307 –310. |
| [11] | 赵霞, 李蓉艳. 采样定理与确定系统采样周期的教学方法方法研究[J]. 工业和信息化教育,2014, 5 : 24 –29. |
| [12] | WEN Dingdu. Study on adaptive fuzzy-Dahlin controlfor system with time-varying[C]//International Conference on Intelligent Computation Technology and Automation. Zhangjiajie, China, 2009:792-794. |
| [13] | 王文亮. 稳定控制回路振铃现象的消除及其关键参数的选择[J]. 船舶电子,2011, 31 (12) : 86 –89. |
| [14] | 郑仲桥, 张艳红. 基于大林算法模型失配时滞控制系统研究[J]. 应用能源技术,2014, 8 (1) : 1 –5. |
| [15] | KAWAGUCHI K, JENDO H. SHIBASAKI R, et al. The control of the pneumatic actuator using Dahlin algorithm[J]. International journal of modeling and optimization,2013, 3 (1) : 98 –100. |