

DOI:10.11991/yykj.201503021

 ,
,
,
,
,
,
,
,
近年来我国交通事业高速发展,截至2014年底,高速公路的通车总里程达11.195×104 km,到2015年公路总里程将达到450×104 km,国家高速公路网基本建成。现代交通给我国经济带来飞速发展的同时,也带了不少问题。交通带来的问题已经是世界性的问题,为了解决这个世界性的问题,各国把目光纷纷投向智能交通系统(intelligent transportation system,ITS)[1],ITS是未来交通系统的发展方向。毫米波汽车防撞雷达具有重量轻、体积小、分辨率高、易于高度集成化的特点,相比于摄像头、激光等光学传感器具有较好的全天候工作能力,受到了国内外汽车电子行业的重视,自适应巡航控制(adaptive cruise control,ACC)、变车道辅助(lane change warning,LCW)、盲区监控(blind spot detection,BSD)等作为汽车主动安全系统都离不开毫米波雷达,在主动安全技术中汽车防撞雷达是目前最重要的研究方向之一,它是ACC以及ITS的基础。国际上美国、日本、德国等先进的汽车生产国,早有汽车防撞雷达产品进入市场,并已经开始装配大型货车和高档轿车[2, 3, 4, 5, 6, 7, 8]。德国的汽车防撞雷达产品有Smartmicro(s.m.s)、博世、海拉等,日本和美国等汽车大国,在汽车主动安全技术均有研究,尤其是汽车防撞雷达在美国的实用化程度较好。国内在汽车防撞雷达方面的研究主要集中在研究所、高校以及一些汽车厂商,如上海微系统所、武汉汽车研究所、清华大学汽车系、上海大众、长春一汽等[3],在研究中取得了一定成果。汽车防撞雷达系统多采用FMCW体制,毫米波FMCW雷达相比脉冲雷达更适于近距离测距、测速,适于装配汽车。文中对采用锯齿波、三角波调制FMCW雷达进行分析,针对多目标识别问题,在原来波形的基础上改进波形,从理论分析和仿真结果两方面可以看出,利用该波形和算法能准确识别多目标。
1 汽车防撞雷达雷达系统结构原理汽车防撞雷达系统一般包括射频前段、信号处理模块、接口3部分组成 :1) 射频前端。一般包括发射天线、接收天线、低噪声放大器(low noise amplifier,LNA)、功分器、以及混频器等。目前,毫米波基础元器件和系统已具备工程应用的技术条件,特别是毫米波器件的模块化、毫米波单片集成电路(monolithic microwave integrated circuit,MMIC)工艺上的进展和突破,使毫米波器件能以被接受的价格提供批量产品[4]。2)信号处理系统。信号处理系统接收到由射频前端发送过来的经混频之后的中频信号,首先进行中频信号调理,包括放大、滤波等经A/D转换后送入DSP中进行加窗、FFT、恒虚警处理、峰值检测、目标参数检测等一系列的数字信号处理,并将处理结果通过接口发送到汽车控制系统;同时,信号处理系统会产生调制三角波、锯齿波,用来控制射频前端的天线发送。3)接口电路。常用于汽车的通信接口电路CAN、LIN总线等通过接口电路与汽车ECU交换数据。
毫米波汽车防撞雷达电路结构框图如图 1。
 |
| 图 1 毫米波汽车防撞雷达电路结构框图 |
图 1中雷达天线为收发分离天线(1T/2R)VCO(压控振荡器)模块根据调制信号相应地产生调频信号,调制信号一般选择三角波、锯齿波等;VCO 输出的已调信号一分为二:一部分作为发射信号由发射天线发射;另一部分作为解调的本振信号。电磁波由目标反射后,返回到雷达天线前端由接收天线接收,对该接收信号低噪声放大(LNA)处理后,与发射信号进行混频,得到二者的中频信号,再经中频放大器进行放大后至A/D进行转换后送至信号处理模块进行处理。其信号处理框图如图 2。
 |
| 图 2 汽车防撞雷达信号处理流程 |
如图 3所示,受锯齿波调制的发射信号[5]其波形是幅度恒定正弦波,而其频率按照锯齿波线性变化,回波信号是一个与发射信号有延时的相似波形。
 |
| 图 3 锯齿波调制FMCW发射波形与接收波形 |
 代表FMCW调制斜率,其越大表示调制波形越陡峭,在相同的的距离κ越大所产的频差越大。
代表FMCW调制斜率,其越大表示调制波形越陡峭,在相同的的距离κ越大所产的频差越大。
从式(1)可以发现,fIF的大小取决于调制斜率κ和时间延时tτ。当目标为静止时fIF仅仅包含目标的距离信息,此时可得到目标的距离R ,R与fIF成正比:
现实环境中目标往往是运动的,由于多普勒效应,此时fIF不仅包含距离所产生的拍频信号而且还叠加了多普勒频移。此时中频信号为fIF=fR±fD,fR取决于调制斜率κ和距离R,fD取决于速度v,一般距离所产生的fR远大于速度所产的的多普勒频偏fD,设置较大适中的调制斜率κ,可以忽略速度对中频信号的影响,进而实现锯齿波测距,对于获取目标速度参数,锯齿波无法满足要求。
2.2 三角波调制波形FMCW图 4为调频连续波(FMCW)三角波[6]调制发射和接受的频率-时间关系图。
 |
| 图 4 三角波FMCW雷达发射和接收信号频率-时间图 |
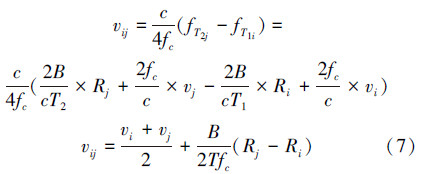
图中在正斜率段fIF+=fR-fD,负斜率段fIF-=fR+fD,两式相加消去多普勒频移得



假如在单目标环境下FMCW 雷达完全可以进行对目标的距离、速度进行探测与识别。但是在多目标环境下,如果有n个目标,那么对上扫频的中频信号进行频谱分析可以得到n 个谱峰,可分别表示为[fIF+1,fIF+2,fIF+3,… ,fIF+n],同理由下扫频的差拍信号可以得到n 个谱峰:[fIF-1,fIF-2,fIF-3,… ,fIF-n]。因为上、下扫频谱峰没有直接相关的配对信息,所以共有n2 种配对可能,其中n 个是真实目标,其他n 2-n个虚假目标,如何有效识别出n个真正的目标并且排除n2-n虚假目标是需要面对的难题[7]。
3 改进传统FMCW调制波形锯齿波可以解决多目标测距,但是不能同时解决测速;在单目标情况下三角波FMCW可以满足测速、测距,而多目标情况下由于错误的目标配对导致虚假目标出现。为了解决因配对产生的虚假目标,文献[9]提出了频域配对法,原理是利用同一目标在上、下扫频段回波频谱具有相同的形状的特点实现配对,但当多个目标的回波信号具有频谱和幅度相似形状特点时,目标配对就会出现问题,文献[10]提出了一种改进传统的三角波的波形,采用不同的调制斜率的三角波作为调制信号,用于去除虚假目标,但是这将导致延长了测量时间,实时性降低;文献[11] 提出了动目标检测( MTD) 频域配对法来频谱配对,需要计算上、下扫频段得到的频谱峰值、信号能量以及频谱的相似度等,所以计算量很大,对整个系统要求较高。综上所述,为了解决多目标识别的问题,同时不降低整个系统实时性以及算法的可实现性,文中结合传统的锯齿波和三角波FMCW各自优点,对传统的调制波形进行改进,改进的波形如图 5所示。
 |
| 图 5 改进传统FMCW调制波形 |
在整个周期调制信号由T1、T2、T3三段组成,T1=T2>>T3调制带宽相等为B,经过混频,下变频到中频信号,根据上面推导出的公式最终在T1、T2、T3三段,分别得到fT1、fT2、fT3:

在T1调频周期的上扫频段,假如出现n个目标,第i个目标的频谱峰值频率为:


 调制斜率
调制斜率  越大其产生的中频频率越大,由于T3时间非常的短,故其调制斜率非常大,在fT3+=fIFT3-fd中fIFT3≥fd,忽略多普勒频移fd,近似求得fT3+≈fIFT3,进而可直接求出相对准确距离R,直接用于去除因fT1、fT2相互组合产生虚假目标,这就为FMCW雷达排除虚假目标提供了理论依据。
4 算法设计以及MATLAB仿真
4.1 算法设计
越大其产生的中频频率越大,由于T3时间非常的短,故其调制斜率非常大,在fT3+=fIFT3-fd中fIFT3≥fd,忽略多普勒频移fd,近似求得fT3+≈fIFT3,进而可直接求出相对准确距离R,直接用于去除因fT1、fT2相互组合产生虚假目标,这就为FMCW雷达排除虚假目标提供了理论依据。
4 算法设计以及MATLAB仿真
4.1 算法设计
为了提高在复杂环境下,多目标识别的准确度,文中结合传统锯齿波和三角波的特点,对传统的调制波形进行改进,图 6为汽车防撞雷达多目标探测信号处理流程。
 |
| 图 6 汽车防撞雷达多目标探测信号处理流程 |
首先对n个目标回波信号频谱在T1、T2扫频段进行处理,按照相同目标在上、下扫频段实际的距离单元位置相近,进行简单配对,这样可以减少后续目标配对的复杂度,这样计算得到一组(Ri,vi),i∈[1,k],n≤k≤n2。同理在T3扫频段,得到n个目标的距离Rj,j∈n,对距离Ri ,Rj进行搜索匹配,如果|Ri-Rj|<△R成立,则(Ri,vi)为一组真实距离,否则为虚假目标,式中ΔR为容差函数,容差函数的建立参考文献[10]。由式(2)可知距离分辨率为
取容差函数的值为最大测距误差ΔR。取调制周期T=10 ms;带宽B=150 MHz;采样率fs=1 MHz;FFT变换的点数NFFT =102 4点;c为光速取3×108 m/s;ΔR=0.5 m。
4.2 MATLAB仿真雷达依据调制方式分为脉冲和连续波,在近距离测距测速连续波相比脉冲雷达具有一定优势,文献[6]论述了连续波种种优势。图 7为传统FMCW雷达发射波形。
 |
| 图 7 传统FMCW雷达发射波形 |
仿真参数设计,汽车毫米波雷达发射频率fc=77 GHz;波长λ=3.89 mm;带宽B=150 MHz;最远探测距离200 m;最大探测速度240 km/h;扫频时间T1=T2=10 ms;T3=10 μs。图 8为FMCW雷达信号带宽随时间变化图。
 |
| 图 8 FMCW雷达信号带宽随时间变化图 |
汽车参数设置为(10,10),距离R=10 m,速度为10 km/h=2.78 m/s。4个目标参数设置具体如表 1所示。
| 目标 | 距离 /m | 速度 | RCS /dBsm |
| 目标1 | 50 | 60 km/h=16.67 m/s | 17 |
| 目标2 | 150 | 130 km/h=36.11 m/s | 30 |
| 目标3 | 100 | -30 km/h=-8.33 m/s | 20 |
| 目标4 | 200 | 200 km/h=55.56 m/s | 17 |
MATLAB仿真结果分析,如图 9为在传统FMCW三角波T1、T2上下扫频段,由于缺乏相关信息直接配对产生16个目标,其中只有4个目标为真实目标,其余12个是虚假目标;图 10为在T3锯齿波段直接对目标的距离R进行估计去除虚假目标,图中可见检测到4个目标的距离。
 |
| 图 9 在T1、T2上下扫频段进行配对出现的目标 |
 |
| 图 10 T3段直接对目标的距离R进行去除虚假目标 |
结合文中改进FMCW调制波形,以及多目标识别算法,对虚假目标进行剔除。图 11为剔除虚假目标,保留真实目标后的距离-速度分布图。
 |
| 图 11 改进传统FMCW雷达多目标检测距离-速度分布 |
表 2为MATLAB最终检测到的4个目标,以及对应的距离R、速度V。
| 目标 | 相对距离/m | 相对速度 |
| 目标1 | 40.77 | 48.56 km/h=13.49 m/s |
| 目标2 | 140.5 | 119.57 km/h=33.21 m/s |
| 目标3 | 91.57 | -36.47 km/h=-10.13 m/s |
| 目标4 | 191.68 | 185.47 km/h=51.52 m/s |
仿真实验结果表明,文中对传统三角波和锯齿波改进的FMCW雷达的多目标识别算法可以排除虚假目标、准确实现多目标识别,而且有利于提高整个毫米波汽车防撞FMCW雷达的实时性和可靠性。
5 结束语文中分析了传统的锯齿波、三角波FMCW雷达测距、测速原理以及优缺点,并对现实行车环境中,多目标识别问题进行了研究,分析频域配对法和变周期FMCW雷达等多目标识别算法,并结合三角波和锯齿调制波形的优点并进行了改进,采用了更加容易实现的波形和更加有效的多目标识别算法。仿真结果表明:该方法可以有效剔除虚假目标保留真实目标、不影响整个系统实时性,能够探测前方目标车辆的相对速度和距离R。因此该方法对简化毫米波汽车防撞雷达设备、降低硬件成本有着重要的参考价值。
| [1] | LIANG Han, KE Wu. Radar and radio data fusion platform for future intelligent transportation system[C]//Proceedings of the 2010 European Radar Conference. Paris, France, 2010: 65-68. |
| [2] | JOSEF W. Automotive radar-status and perspectives[C]//Proceedings of the 2005 IEEE Compound Semiconductor Integrated Circuit Symposium. Palm Springs, USA, 2005: 21-23. |
| [3] | 张昱, 宋骊平, 虎小龙. 基于概率假设密度的汽车防撞雷达多目标跟踪[J]. 现代雷达, 2014, 36(6): 82-87. |
| [4] | SAUNDERS D, BINGHAM S, MENON G, et al. A single-chip 24 GHz siGe BiCMOS transceiver for low cost FMCW airborne radars[C]//Proceedings of the IEEE 2009 National Aerospace & Electronics Conference. Dayton, USA, 2009: 244-247. |
| [5] | KRONAUGE M, ROHLING H. New chirp sequence radar waveform[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4): 2870-2877. |
| [6] | RONLING H, MOLLER C. Radar waveform for automotive radar systems and applications[C]//Proceedings of the 2008 IEEE Radar Conference. Rome, Italy, 2008: 1-4. |
| [7] | 屈飞园, 曹宁. 车载FMCW雷达准确检测多目标的一种有效方法[J]. 科学技术与工程, 2012, 12(6): 1263-1266. |
| [8] | FISCHER J, MENON A, GORJESTANI A, et al. Range sensor evaluation for use in cooperative intersection collision avoidance systems[C]//Proceedings of the 2009 IEEE Vehicular Networking Conference. Tokyo, Japan, 2009: 1-8. |
| [9] | 史林, 张琳. 调频连续波雷达频谱配对信号处理方法[J]. 西安电子科技大学学报, 2003, 30(4): 534-538. |
| [10] | 蒋留兵, 许腾飞, 杨昌昱, 等. 一种汽车防撞雷达多目标识别方法[J]. 现代雷达, 2014, 36(6): 54-58. |
| [11] | 杨建宇, 凌太兵, 贺峻. LFMCW雷达运动目标检测与距离速度去耦合[J]. 电子与信息学报, 2004, 26(2): 169-173. |