

DOI:10.3969/j.issn.1009-671X.201407001


电力电子装置在近30年来大量地投入到了船舶电网中,随着其容量越来越大,特别是大量的变流器、整流器以及逆变器装置等非线性电力电子装置在电网中的比重越来越大,给船舶电网带来了严重的谐波污染,极大地降低了电力系统的电能质量[1],对船舶的安全与经济运行造成了直接的影响,因此,有必要对谐波治理的方法进行研究与探讨。 电网谐波的治理方法主要有2种:一种是预防性措施;另一种是补救性措施[2]。目前应用较多的是后者,也就是在电网中使用滤波器,包括无源滤波器和有源电力滤波器(APF)两类[3, 4, 5]。然而,由于无源滤波器只能吸收电网中固定某次的谐波且受电网环境影响较大,因此,现如今研究与应用较多的是有源电力滤波器。它是一种主动对电网中的谐波进行治理的电力电子装置,能够在补偿谐波的同时也对无功功率进行补偿。
APF的补偿性能受到谐波电流检测精度与速度的影响,传统ip-iq检测算法检测效果受到低通滤波器制约,难以同时获得较好的检测精度与较快的检测速度[6]。本文对传统检测算法进行改进,利用自适应滤波器实现低通滤波器,很好地改善了检测效果,并利用MATLAB的SIMULINK工具对并联型APF进行了仿真分析,验证了改进的算法和所建模型正确性和有效性。
1 并联型APF原理 1.1 并联型APF结构
并联型APF与谐波源并联接入电网,向电网注入补偿电流,表现出电流源的特性[7]。其结构图如图 1所示。
 |
| 图 1 并联型APF结构 |
从图 1中可以看出,并联型APF主要由4部分构成:指令电流运算电路、PWM控制信号发生电路、主电路驱动电路以及主电路。并联型APF的基本工作原理是[8]:首先,并联型APF的谐波检测电路对谐波源侧的电网电流进行检测,运算出电网所需补偿电流的指令电流;接着,指令电流控制PWM信号生成电路生成控制主电路逆变器相应的PWM控制信号;最后,主电路电压型逆变器在控制信号的作用下,各个桥臂不断通、断,产生补偿电流,对电网进行谐波补偿。
假设il是未补偿前船舶电网中的电流,ilh为il中的谐波畸变成分,APF从电网中检测并运算出的指令电流信号为i*c,PWM控制信号生成电路在i*c与实际补偿电流ic作用下会生成控制主电路逆变器桥臂开关通、断的PWM信号,进而控制主电路生成补偿电流,与电网中的谐波电流ilh相互抵消,获得基波电流,实现谐波补偿。其公式表示为

1.2 谐波电流检测算法及其改进方法
谐波电流检测算法应用与研究最多的是ip-iq算法,它是以H.Akagi在1983年提出的瞬时无功功率理论为基础,计算三相电路的瞬时有功电流ip和瞬时无功电流iq,进而计算获得电网中的谐波分量[9]。其谐波检测原理图如图 2所示。
 |
| 图 2 ip-iq谐波检测原理图 |
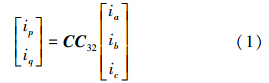
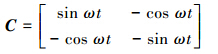
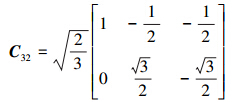
图 2中,ia、ib、ic是电网中负载三相电流的瞬时值,式(1)给出了根据瞬时无功功率理论可以得出的瞬时有功电流ip和瞬时无功电流iq。
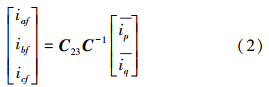
ip和iq经过低通滤波器后会滤除他们中的高频成分,获得直流分量ip、iq,再通过相应的“逆”运算(可由式(2)表示)就可以得到船舶电网中的基波分量,与原电流相减便可计算出电网中的畸变电流,也就是并联型APF的指令电流。
由上述分析可知,检测算法中运用到了低通滤波器,这就使得检测性能受到了低通滤波器截止频率的制约,不能够同时获得较快的检测速度与较高的检测精度,因此有必要对其进行改良。
经过研究实验,本文提出运用自适应滤波器来实现低通滤波器功能,能够很好的改善ip-iq谐波检测算法的检测性能,不仅能够提高检测精度,而且加快了其动态响应速度。自适应滤波算法中,LMS是最常用的算法,该算法结构简单,易于实现,且收敛速度快,具有较强的鲁棒性[10,11,12]。本文结合实际情况,用来实现低通滤波器功能的LMS自适应滤波器如图 3所示。
 |
| 图 3 LMS自适应滤波器原理 |
图中,输入值ip(n)为负载有功电流的采样值;滤波器的参考输入信号为直流量1;ω(n)为参考输入的权值;y(n)是滤波器的输出 ,它是有功电流ip(n)的直流分量;e(n)是误差反馈信号,用来计算更新滤波器的权值ω(n)。
,它是有功电流ip(n)的直流分量;e(n)是误差反馈信号,用来计算更新滤波器的权值ω(n)。
LMS自适应滤波算法表示为

ω(n+1)=ω(n)+μe(n)
式中:μ为控制自适应滤波器收敛速度和使系统稳定的迭代步长因子。在自适应滤波器中,视ip(n)的直流分量为滤波器的期望信号,干扰信号为ip(n)中的谐波分量总和。滤波器的权值ω(n)通过误差反馈信号e(n)的控制,跟踪滤波器的最佳权值的变化,使得滤波器的输出y(n)跟踪ip(n)中直流分量的变化,输出直流分量,从而实现低通滤波器功能。
1.3 并联型APF控制策略
并联型APF原理可知,主电路逆变器若要产生准确的补偿电流,其开关器件必须要在比较精确地控制下进行通断操作,而其控制信号是由PWM控制电路来提供的。因此,PWM信号的产生对整个APF而言就是一个十分关键的组成部分。
一般而言,PWM信号由指令运算电路所发出的指令电流和主电路生成的补偿电流间的某种相互关系来产生,这种关系就是APF的控制策略,这种控制策略能够控制PWM信号,以此来控制补偿电流跟踪指令电流的变化,进而保证补偿电流的准确性[13]。
若要对一个电网的谐波电流进行较为精确地补偿,那么就需要并联APF产生的补偿电流能够很精 确地跟随指令电流的变化而变化,APF的控制方式就显得尤为关键。本文采用目前常用的滞环比较法来产生控制主电路的PWM信号,原理如图 4所示。
 |
| 图 4 滞环比较法原理 |
图 4中,滞环比较器存在一个阈值,i*c是并联型APF对电网电流进行检测获得的谐波电流指令信号,ic是并联型APF经过PWM控制实际输出的补偿电流信号,将他们做差后就会的到得到Δic,它与阈值相比较就可以产生控制主电路逆变器相关器件通断的PWM信号。
1.4 直流侧稳压控制
并联型APF主电路的逆变器是电压型逆变器,前述可知其直流侧带有一个电容C,充当着电压源的作用。电容C两端的电压决定着逆变器产生的补偿电流能否准确地对电网谐波中谐波电流进行补偿,电容C两端端电压的稳定是并联型APF对电网谐波电流准确补偿的前提,从而产生准确的PWM控制信号[14]。
电容C两端的电压对逆变器输出补偿电流造成的影响主要有2个:一个是在电压过低时容易出现欠补偿现象,使得逆变器输出的补偿电流难以保证有较高的精度;另一个是在电压较高时,容易出现过补偿现象,在这种情况下,逆变器输出的补偿电流会多出额外的谐波电流注入电网,干扰APF对电网谐波电流的补偿。因此,若要获得较为理想的补偿效果,就必须保证电容C两端的电压维持在一个比较稳定的值。然而,APF自身并不能维持电容C两端电压维持在一个稳定的范围内,需要借助外部措施来解决这种问题,避免过补偿或者欠补偿对补偿性能的影响。由于电容C的作用相当于一个电压源,因此,本文对直流侧电压进行控制的方法是将直流电容用一个单独的直流电源来代替,相当于直流侧电容C两端电压能够维持在一个稳定的值。
2 并联型APF仿真建模分析 2.1 建立仿真模型
船舶电网属于低压配电网,三相三线制并联APF能够很好地满足船舶电网谐波抑制的要求。本文运用SIMULINK工具对并联型APF进行了仿真建模,仿真模型如图 5所示。
 |
| 图 5 并联型APF仿真模型 |
从图 5可以看出,本文所建立的仿真验证模型主要分为3个部分:谐波源、并联型APF以及电压源。其中,电压源的参数为380 V、50 Hz;谐波源采用了三相桥式全控整流电路来进行仿真,其仿真模型如图 6所示。
 |
| 图 6 谐波源模型 |
从图 6中可以看出,本文所建立的谐波源模型由三相可控硅整流桥构成,其中,同步六脉冲发生器和可控硅整流桥共同组成完整的可控硅整流电路,通过给定的脉冲发生器输入端alpha_deg输入参数,可以控制整流桥门极触发脉冲的触发角大小,本文触发角为30°,整流带阻感为R=100 Ω、电感L=10 mH。
2.2 仿真结果分析
由于电网的三相负载对称,所以电网三相电压有着相同的波形不同的相位,只需要对一相分析即可,本文以A相为例。图 7给出了在APF没有对电网谐波进行补偿情况下电网A相的电流波形。
 |
| 图 7 补偿前A相电流波形 |
从图中可以看出,在未对电网谐波进行补偿时,电网A相电流发生了明显的畸变,通过SIMULINK中的powergui模块分析后可以知道电网A相电流的谐波畸变率THD=13.01%。图 8、9给出了本文所建立并联型APF投入到电网后所检测到的电网谐波电流以及对电网谐波电流补偿后的波形图。
 |
| 图 8 电网A相谐波电流 |
 |
| 图 9 补偿后A相电流波形及其频谱分析 |
从图 8、9中可以看出在运用本文所建的并联型APF对电网谐波电流进行补偿后,A相电流的畸变程度显著降低,THD=3.58%,电网电能质量得到明显改善,验证本文所提谐波电流检测算法以及所建立的并联型APF模型的正确性和有效性。
3 结束语
随着船舶电力系统中的非线性电力电子装置的广泛应用,使得船舶电网中存在着大量的谐波污染,降低了电网的电能质量,影响用电设备的安全与经济运行。为改善电能质量,对传统船舶电网谐波治理方法——有源电力滤波器进行了研究,提出低通滤波器是制约其性能的主要环节,并对其进行了改进,运用LMS自适应滤波器来实现谐波检测算法中的低通滤波器,很好地提高了检测性能。最后,针对船舶电网低压配电网建立了完整的并联型APF模型,仿真结果表明,所提谐波电流检测算法和所建立的并联型APF模型的正确性和有效性。
| [1] | 熊杰锋,李群,袁晓冬,等. 电力系统谐波和间谐波检测方法综述[J]. 电力系统自动化,2013(11):125-133. |
| [2] | 李颖峰, 马永翔. 电力系统谐波治理研究[J]. 电气开关, 2008, 46(4): 27-28. |
| [3] | 杜少通,伍小杰,魏琛, 等. 新型无变压器型并联混合有源滤波器[J]. 电工技术学报,2013(12):1-7. |
| [4] | 孙京京,陈兆岭,钱鹏, 等. 并联有源电力滤波器的滑模统一控制[J]. 电测与仪表,2013(7):67-71. |
| [5] | SASAKI H, MACHIDA T. A new method to eliminate AC harmonic currents by magnetic flux compensation considerations on basic design[J]. IEEE Transactions on Power Apparatus and Systems, 1971 (5): 2009-2019. |
| [6] | 王群, 姚为正, 王兆安. 低通滤波器对谐波检测电路的影响[J]. 西安交通大学学报, 2002, 33(4): 5-8. |
| [7] | 王群,姚为正,刘进军,等. 谐波源与有源电力滤波器的补偿特性[J]. 中国电机工程学报,2001(2):17-21. |
| [8] | 王雅,魏文新,张维. 优化复合控制技术在有源电力滤波器中的应用[J]. 船电技术,2012(5):22-25. |
| [9] | AKAGI H, KANAZAWA Y, NABAE A. Generalized theory of the instantaneous reactive power in three-phase circuits[C]//IEEE & JIEE Proceedings IPEC. Tokyo,1983: 1375-1386. |
| [10] | ABOULNSR T, MAYYAS K. A robust variable step-size LMS-type algorithm: analysis and simulations[J]. IEEE Transactions on Signal Processing,1997, 45(3): 631-639. |
| [11] | KWONG R H, JOHNSTON E W. A variable step-size LMS algorithm[J]. IEEE Transactions on Signal Processing, 1992, 40(2): 1633-1642. |
| [12] | 李辉, 李亦斌, 邹云屏,等. 一种新的变步长自适应谐波检测算法研究[J]. 电力系统自动化, 2005, 29(2): 69-73. |
| [13] | 张崇巍, 张兴. PWM整流器及其控制[M]. 北京: 机械工业出版社, 2005:226-236. |
| [14] | 尚羽佳. 并联型有源电力滤波器谐波检测与电压预测控制的研究[D].天津:天津大学, 2012: 42-50. |