

DOI:10.3969/j.issn.1009-671X.201405020

 , ,
, ,
近年来,交流变频调速系统的发展非常迅速,已成为调速系统主要研究和发展的对象。目前该系统在市场上广泛采用的控制策略为正弦脉宽调制(sinusoidal pulse width modulation,SPWM),但采用该方法会使系统产生某些高次谐波分量,进而引起电动机发热、转矩脉动甚至系统的振荡。空间矢量脉宽调制(space vector pulse width modulation,SVPWM)的算法简单且易于实现,在输出电压或电机线圈电流中产生的谐波少,且就SPWM方法来说能够进一步提高对电压源逆变器直流供电电源的利用率[1, 2]。故采用基于SVPWM的空间矢量控制策略来控制永磁同步电机能产生更好的控制效果。在闭环控制电机转速方面,传统上采用PI控制器,但由于该系统较为复杂,采用PI规律很难进一步提高控制效果。单神经元自适应PID(single neuron adaptive PID,SNAPID)控制器不需要对被控对象进行精确的建模与分析,它能通过自身不断的学习迭代过程,了解系统的结构参数与不确定性,生成最佳的控制参数,环境变化适应能力较强,可以得到较好的控制效果[3, 4]。
1 单神经元控制算法
单神经元控制器是神经网络中最基本的元件,它计算量小、结构简单、应用方便。由具有自学习和自适应能力的单神经元构成单神经元自适应智能PID控制器,不但结构简单,而且有较强的鲁棒性,能满足实时控制的要求。 1.1 单神经元典型的学习规则
单神经元典型的学习规则有:无监督的Hebb学习规则为Δwij(k)=ηoj(k)oi(k);有监督的Delta学习规则为Δwij(k)=η(dj(k)-oj(k))oi(k);有监督的Hebb学习规则是将无监督的Hebb学习规则稍作改进,引入有监督的Delta学习规则中定义的神经元激活值,即为 Δwij(k)=η(dj(k)-oj(k))oj(k)oi(k)。其中η为学习速率,oi(k)、oj(k)分别表示神经元i、j的激活值,wij表示神经元i、j的权值。 1.2 SNAPID控制器的学习规则
SNAPID控制器是通过对加权系数的调整来实现自适应、自组织功能,权系数的调整是按有监督的Hebb学习规则实现的。文中SNAPID控制器采用的是改进的有监督的Hebb学习规则,表达式为
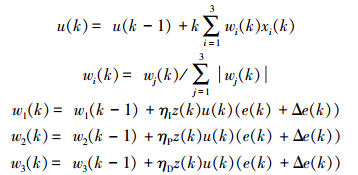
SNAPID控制器控制结构如图 1所示,其输入端为误差e(k),输出端为控制信号u(k)。神经元比例系数K为唯一的参数,通过选取合适的K值,控制器的权系数在P、I、D这3个路径不断迭代,快速实现控制作用。在程序的起始位置分别对学习速率ηI、ηP、ηD与加权系数w1(k)、w2(k)、w3(k)赋值,学习规则中误差e(k)与控制信号u(k)初值均为零,wi(k)与xi(k)按照学习规则不断迭代并作数量积运算,得到作用于控制对象的控制信号u(k),之后加权系数继续不断迭代循环往复进行[5]。因为神经元具有学习能力,通过适当调节比例项P和积分项I的学习效率,在起动阶段可达到无超调的理想状态,且微分项D通常被忽略。这样提高了系统的实时性[6]。
 |
| 图 1 Hebb学习规则的控制结构 |
2 SVPWM交流变频调速系统
SVPWM算法是在三相正弦波对称电压的作用下,通过选择合适的空间电压矢量,并调控其的作用顺序和作用时间,使定子磁链空间矢量旋转轨迹接近圆形[7]。运用MATLAB/SIMULINK建立基于SVPWM的双闭环交流变频调速系统[8],验证SNAPID控制器的有效性。
2.1 SNAPID控制器的交流变频调速系统
传统的转速控制器是以永磁同步电机的转速为被控对象,采用传统的PI控制与给定转速构成的闭环反馈控制系统。采用MATLAB/SIMULINK设计SNAPID控制器的方法为:编写关于改进的有监督的Hebb学习规则的仿真M程序,利用SIMULINK中的MATLAB-Function模块进行调用[9],取代传统的PI控制环节。在本设计的控制器设置初始值时,神经元控制器学习速率ηI为0.6,ηP为0.4,ηD为0,权系数w1(k)初值为0.25,w2(k)初值为4,w3(k)初值为0。得到基于SNAPID控制器的交流变频调速系统如图 2所示。
 |
| 图 2 基于SNAPID控制器的交流变频调速系统 |
2.2 仿真试验与结果分析
为了验证本文所设计的变频调速系统的模型的正确性及其静、动态性能,对其转速一定时,负载转矩发生变化的情况进行仿真试验。按照图 2所示,设置永磁电机的参数如下:电机额定功率PN=1.68 kW,额定转矩TN=8 N·m,额定转速nN=2 000 r/min, 极对数p=4,定子电阻Rs=0.958 5 Ω,电机在d、q轴下的电感Ld=Lq=0.005 25 H,转动惯量J=0.000 632 9 kg·,转子磁场磁通ψf=0.182 7 Wb,粘滞摩擦系数B=0.000 303 5 N·m·s。且设置逆变器直流侧电压为Udc=300 V,设定电机的给定转速为n=2 000 r/min。
具体仿真步骤实施如下:将仿真时间设为0.3 s,让电动机以负载转矩为TL=1 N·m直接启动,运行达到稳定后,第0.15 s时,突加电动机负载转矩至TL=3 N·m。得到分别采用传统PI控制器和SNAPID控制器时,电动机在启动及突加负载转矩的过程中转速的变化曲线如图 3所示,电磁转矩的变化曲线如图 4所示,以及电动机d、q轴的电流曲线如图 5所示。
 |
| 图 3 电动机转速变化曲线 |
 |
| 图 4 电动机电磁转矩变化曲线 |
 |
| 图 5 电动机d轴电流 |
 |
| 图 6 q轴电流的变化曲线 |
如图 3、4所示,电动机在帯载启动时,电磁转矩较大,这是为了完成电机的加速过程,使其转速可以在极短时间内达到电机的给定值2 000 r/min;到0.15 s时,负载转矩突加为3 N·m,转速和电磁转矩均产生了波动,随后电磁转矩迅速稳定在3 N·m上,转速也快速稳定在2 000 r/min上。
如图 5、6所示,由于电动机采用了id=0的矢量控制方法,故d轴电流始终在设定值0附近波动,而q轴电流与电机的电磁转矩之间成正比[10]。系统的电流曲线不论在启动过程中还是突加负载转矩时,都能够快速地恢复稳定状态,达到稳定值。
比较2种控制器下转速、电磁转矩的变化曲线,从控制系统的过渡过程特性来看,启动时,采用普通PI控制器得到的转速和电磁转矩曲线均有较大的超调量,其中转速超调量约为20%,过渡过程历时约为0.05 s;采用SNAPID控制器得到的转速和电磁转矩曲线相对来说超调量减小,转速超调量 为12.5%,过渡过程历时为0.035 s。运行至0.15 s时 突加负载转矩,采用普通PI控制器,电动机转速受到扰动有较大的变化,转速动态变化率为9.38%,且恢复时间为0.02 s;采用SNAPID控制器动态变化率为3.05%,且恢复时间为0.018 s。总体来说,SNAPID控制器的控制性能要优于普通PI控制器,具有很好的自适应性和鲁棒性,对系统的动态过程和稳定性进行了改善。
3 结束语
仿真分析和实验结果表明,单神经元PID控制器是一种具有自学习能力和自适应能力的良好控制器,将其应用在交流变频调速系统中,能有效地减小超调,缩短调节时间,对其动态过程和稳定性起到了极大的改善。
| [1] | 范心明.基于SIMULINK的SVPWM仿真[J]. 电气传动自动化, 2009 (3): 19-21. |
| [2] | 程启明, 王映斐, 胡晓青, 等. 基于 SVPWM 的永磁同步电机矢量控制系统的建模与仿真[J]. 上海电力学院学报, 2012, 28(4): 329-335. |
| [3] | 吴凌云,陈春霞.基于单神经元PID控制器的PLC直流电机控制系统[J].制造业自动化,2010,32(9):101-139. |
| [4] | 李俊丽, 何勇, 王生泽. 单神经元 PID 在多电机同步控制中的应用[J]. 机电工程, 2010, 27(8): 14-18. |
| [5] | 刘金琨.先进PID控制及其MATLAB仿真[M]. 北京: 电子工业出版社, 2003:87-92. |
| [6] | 万健如,张海波,曹才开.单神经元PID控制器永磁同步电机调速系统[J].电力电子技术,2005,39(1):75-78. |
| [7] | 杨玉杰, 汪仁先. 基于 MATLAB 的 SVPWM 变频调速系统的仿真[J]. 鞍山钢铁学院学报, 2002, 25(4): 244-247. |
| [8] | 王晶,翁国庆,张有兵.电力系统的MATLAB/SIMULINK仿真与应用[M].西安:西安电子科技大学出版社,2008:97-105. |
| [9] | 隋峻, 王晶, 樊键, 等. SVPWM 在永磁同步电机系统中的应用与仿真[J]. 兵工自动化, 2011, 30(3): 55-58. |
| [10] | 任俊杰. 船用永磁同步电动机推进系统建模与仿真研究[D]. 大连: 大连海事大学, 2010:19-28. |