
|
收稿日期: 2018-11-16; 预印本: 2019-03-14
基金项目: 国家自然科学基金 (编号:61571442);科技部国家重点研发计划项目(编号:2016YFB0502405);中央高校项目(编号: 3122014C004)
第一作者简介: 卢晓光,1983年生,男,讲师,研究方向为自适应雷达信号处理,极化合成孔径雷达图像目标检测与识别、机载气象雷达信号处理。E-mail:xglu@cauc.edu.cn
通信作者简介: 韩萍,1966年生,女,教授,研究方向为雷达图像图像处理、模式识别。E-mail:hanpingcauc@163.com
|
摘要
针对复杂PolSAR图像场景中机场目标区域检测问题,本文提出一种自适应无监督分类的机场目标快速检测方法,该方法首先对极化SAR相干矩阵分解提取PolSAR图像的特征值图,转化为超像素图实现图像去噪及降维。然后用SLIC超像素分割算法分割构造超像素。基于超像素图构建极化分类特征,并采用无监督的谱聚类方法提取出疑似机场跑道区域,其中的类别数确定利用VAT-DBE(Visual Assessment of cluster Tendency-Dark Block Extraction)算法获得。最后,在疑似区域内结合跑道结构特征进一步辨识检测出场景中的机场跑道区域。利用美国UAVSAR系统采集的多组全极化SAR实测数据对算法进行验证,并与两种已有的无监督跑道检测算法进行对比,实验结果表明,该算法能够快速准确检测出机场跑道区域,处理耗时可减小80%以上。具有更好的鲁棒性。
关键词
遥感, PolSAR图像, 机场跑道区域检测, 超像素图, 自适应无监督分类, 谱聚类
Abstract
Airport detection is important for military and civilian applications. As a prominent feature of an airport, a runway is frequently used to recognize airport areas in image-processing fields. The classification method is extensively used to resolve the problem of airport detection in PolSAR images. That is, the runway area is extracted through the classification method to determine the airport area. A disadvantage in applying this method is that the number of class in the image must be manually set through the classification method. This process will decrease the robustness of the algorithm. Moreover, given that the classification is normally performed on the pixel of an image, a high computational cost is required. In this study, a fast, adaptive unsupervised classification method for runway detection is proposed. First, the coherent matrix of a PolSAR image is decomposed to construct the eigenvalue image, and then the superpixel image is obtained when the eigenvalue image is processed through the SLIC algorithm. Second, the number of categories of ground objects in the superpixel image is estimated, and the runway ROIs of the superpixel image are extracted through the spectral clustering method, which is an adaptive unsupervised classification. Finally, the prospected areas are further filtered morphologically, and the real runways are identified by combining with the structural features, such as the size, topology, and parallel characteristics of the runways. The algorithm is verified using multiple groups of real PolSAR images acquired through the UAVSAR system and compared with two representative unsupervised algorithms. Experimental results show that the proposed algorithm can detect the runway area quickly and accurately with low false alarm rate And that the runway structure is clear. These experimental results are improved with the use of the proposed algorithm. Thus, the following conclusions are drawn: The SLIC algorithm is used to form a superpixel image to compress the dimension of the original image and reduce computational cost. Simultaneously, speckle noise is suppressed slightly, This result is beneficial for the classification in the subsequent processing. The adaptive class number estimation of images with VAT and DBE algorithms increase the robustness of the proposed method. Runways are extracted effectively and accurately when the polarimetric feature of a PolSAR image is combined with the spectral clustering method. Further studies must be explored despite obtaining improved detection results through the proposed method. For example, improving the blurred part caused by a superpixel image in the detected airport area must be investigated. A probable scheme is to set the number of the superpixel of the image adaptively in accordance with the complexity of the original image contents to yield a high-quality superpixel image.
Key words
remote sensing, PolSAR image, airport runway area detection, superpixel image, adaptive unsupervised classification, spectral clustering
1 引 言
机场作为国家航天重要的基础设施,承载着飞机起降、维护等关键任务,在军事和民用领域具有重要的战略意义,对机场的自动检测也广泛应用于军事打击、灾害救援、飞机导航等实际问题。跑道作为识别机场的一个显著特征,可以通过检测跑道来实现对机场区域的检测。
目前机场跑道检测问题主要集中于光学遥感图像,已有的检测方法大致分为两步:第一步是跑道特征提取,常用的特征有跑道的灰度特性(艾淑芳 等,2017),几何特征(Ebubekir和Hasan,2017),直线段特征(Budak 等,2016;韩晓青和杜红悦,2016;艾淑芳 等,2017),纹理特征(Aytekin 等,2013),尺度不变特征变换SIFT(Scale-Invariant Feature Transform)(Budak 等,2016)等,其中直线段特征应用尤为广泛,但也会受到道路,河流,桥梁等同样具有直线段特征的地物的干扰,而纹理特征和SIFT特征虽然可能会得到更精确的检测结果,但同时也更加的耗时。第二步是选择合适的分类器如SVM(Budak 等,2016),Adaboost(Aytekin 等,2013)进行最终的检测。基于光学图像的机场跑道检测主要问题是图像受到光照及天气的影响,不能保证全天时、全天候实时在线检测。
与光学遥感相比,极化合成孔径雷达PolSAR(Polarimetric Synthetic Aperture Radar)是一种先进的主动式微波成像系统,具有全天时、全天候、强透射性、远距离成像等特点。相对于传统单极化SAR,全极化SAR能够获取多种极化方式的数据,能够获取更多的地物极化信息,可以更好地表征地物细节和特征(Lee和Pottier,2009)。目前,全极化SAR图像越来越多地应用于地物目标检测、分类和识别等领域(Uhlmann和Kiranyaz,2014;张英海 等,2016;胡娇静 等,2018;车美琴 等,2016)。
在PolSAR的目标检测研究领域,目前大多集中在PolSAR舰船目标检测(Paes 等,2010;张嘉峰 等,2018;田巳睿 等,2007),针对机场跑道检测的相关研究相对较少。已有研究主要针对单极化SAR功率图像,同样利用跑道的直线特征,通过边缘检测,霍夫变换,直线段检测器LSD(Line Segment Detector)等直线检测算法检测直线段,并结合先验知识(如机场跑道区域存在平行线对,且长宽必须符合机场跑道的建设标准等)筛选出符合条件的直线段,进而确定机场跑道区域所在的位置,再结合其他特征作进一步辨识(Liu 等,2018;乔寅骐 等,2016;贾承丽 等,2007;何勇 等,2004);但是SAR功率图像中的边缘点容易被相干斑噪声淹没,导致边缘提取困难,直接影响检测结果,且图像场景中的道路、桥梁及河流容易影响跑道的检测结果。近几年提出的多极化SAR跑道检测算法中,往往采取如下流程:先利用目标极化特性并结合图像分类的方法得到感兴趣区域ROI(Region Of Interest),然后再根据跑道的直线特征和其他特性对ROI进行筛选,最终得到真实的跑道区域(韩萍 等,2016;晋瑞锦 等,2014)。这类方法较好地解决了复杂大场景中河流、道路及桥梁对跑道检测的干扰,降低了虚警率,但是仍然存在以下问题:(1)对SAR图像分类时,通常需要设置分类的类别数,而图像中包含地物类别数目往往预先未知。已有的方法是根据经验人为设置(韩萍 等,2016),或者根据某些特征硬性划分为固定的类别数(晋瑞锦 等, 2014;韩萍 等,2016),不能自适应地确定。由于不同场景的SAR图像地物类别个数差别较大,导致算法推广性不强。(2)算法大多是基于单个像素进行处理,在不使用去噪算法对图像进行相干斑抑制的情况下,一些较强的噪声点依然会对分类性能造成干扰;并且,当SAR图像尺寸较大时,算法计算量大,处理效率低。
针对以上问题,本文提出一种基于自适应无监督分类的极化SAR图像机场跑道区域自动检测算法。通过超像素方法进行去噪并降低了原始图像维数,然后,采用无监督聚类方法自适应地估计类别。为进一步提高准确率,还利用了地物目标多数化特性作为分类特征。
2 基本理论
2.1 VAT-DBE类别数估计算法
VAT-DBE方法通过差异图RDI(Reordered Dissimilarity Image)显式反映数据间的差异度,其基本思想是通过构造数据间的差异矩阵,将差异矩阵沿主对角线排序并可视化,形成RDI,再利用投影信号的求导提取到潜在的聚类个数(Bezdek和Hathaway,2002)。具体步骤如下:
假设待测数据集为
(1)计算差异矩阵
(2)设
(3)选择
(4)对于任意
(5)完成遍历后,令
(6)用Otsu方法对RDI图分割形成二值图,形态学处理后通过二值图像距离变换将二值图转换为灰度图(距离度量为欧氏距离)。
(7)对灰度图所有像素值沿主对角线投影,即垂直主对角线的像素点分别相加,再作曲线拟合,得到差异度分布曲线。找到曲线极值点的个数即为数据集的估计类别数。
2.2 谱聚类算法
谱聚类算法是一种建立在谱图理论上的算法,与传统聚类方法相比具有能在任意形状的数据空间聚类并收敛于全局最优的特点(Ng 等,2001)。实际中常采用基于Nyström算法(Fowlkes 等,2004)的谱聚类以减小所花费的时间和空间代价。具体步骤如下:
假设待测数据集为
(1)计算相似矩阵
(2)计算拉普拉斯矩阵
(3)计算拉普拉斯矩阵
(4)用k-means算法对
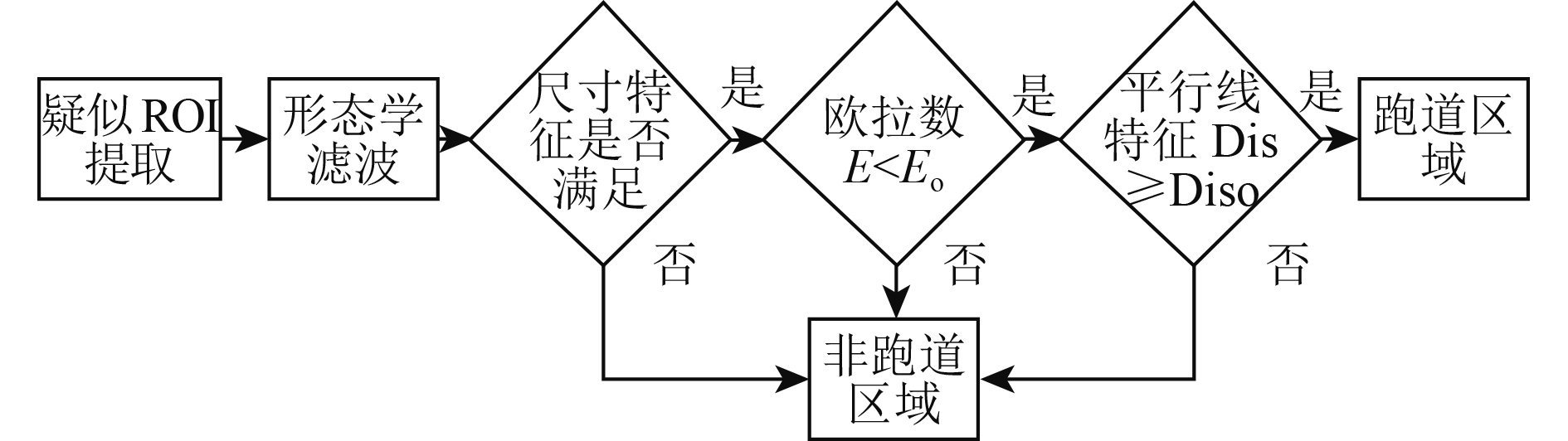
3 本文方法
本文算法主要包括预处理、分类、感兴趣区域筛选及后处理等部分组成。具体流程如图1所示。


3.1 预处理
预处理部分的主要目的是去噪及降维,为后续准确分类及快速处理奠定基础,一般情况下,PolSAR图像去噪主要是去除图像中的相干斑噪声,如典型的Lee滤波及近年来出现一些新方法(Mullissa 等,2017;行晓黎 等,2017;刘留 等,2017)。本文方法主要考虑图像中出现的虚影和伪影干扰去除问题,具体方法如下:
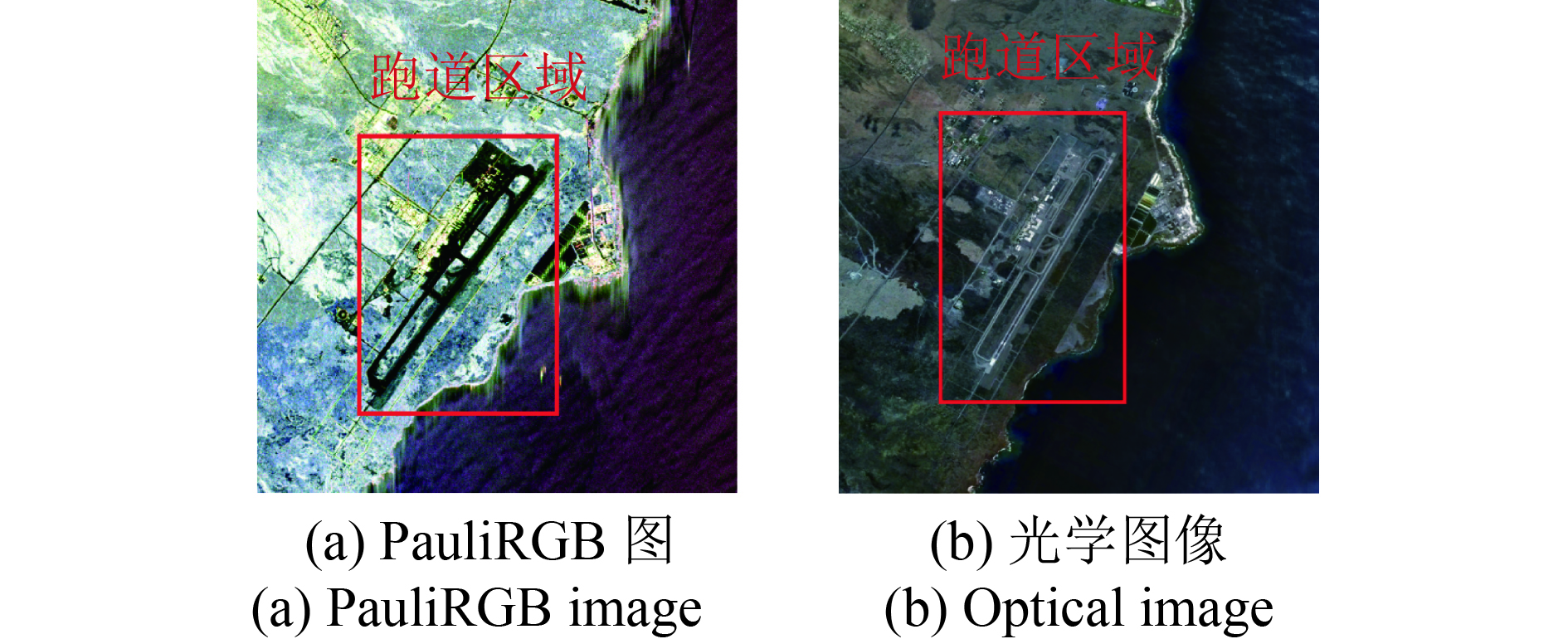
(1)特征值图计算。对原始PolSAR图像T矩阵进行特征分解,提取第3个特征值对应的图像,以去除图像中的虚影和伪影等(吴正升 等,2014;Wang 等,2010)便于后续分类使用。
如图2所示,图2(a)场景为美国Honolulu机场区域;图2(b)是其对应PauliRGB图,红框标出区域为受方位模糊干扰严重区域,可以看到在该区域由于方位模糊产生的竖直红线;在图2(c)
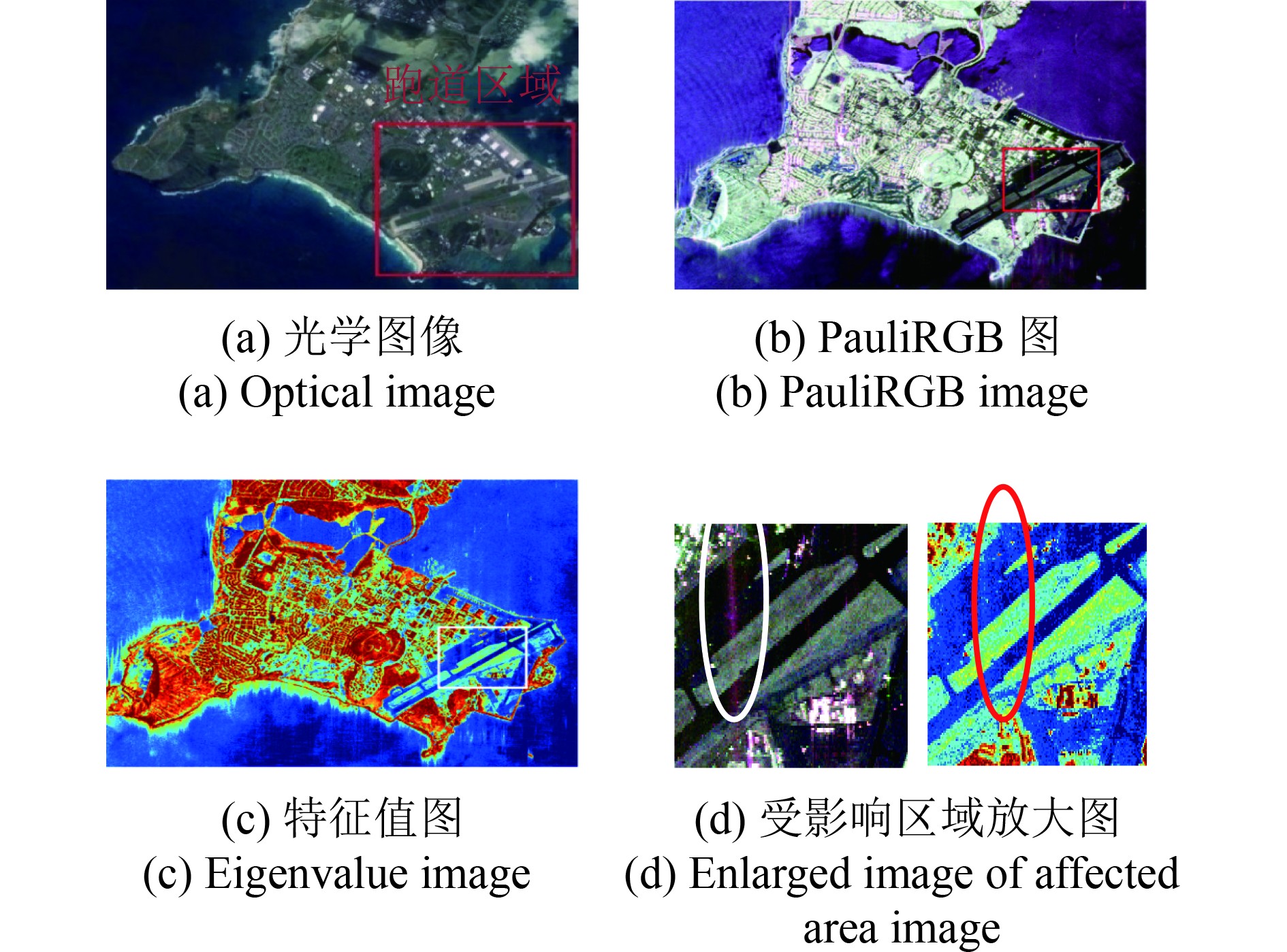
(2)超像素生成。超像素指根据相邻像素间颜色、空间位置等特征将相似的像素合并形成的图像块。分割能够实现对图像相似像素点合并,降低图像冗余的同时保留图像有用细节,大大提高算法效率。本文对特征值图用SLIC算法(Achanta 等,2012)分割生成超像素图
3.2 分类
分类的目的是将图像中的不同地物有效的分开,为后续利用不同地物散射特性提取机场跑道区域打好基础,本部分包括特征提取、类别数估计及分类。
(1)特征提取及类别数估计。将超像素图
| $ {{\bar{ T}}_{si}} = \frac{1}{n}\sum\limits_{i = 1}^n {{{{T}}_i}} $ | (1) |
式中,n为每个超像素中包含像素的个数,
将超像素
(2)图像分类。利用上一步得到的特征分别构造
将最终谱聚类相似矩阵定义为
| $ {{W}} = {{{W}}_1} \odot {{{W}}_2} $ | (2) |
式中,
4 实验结果与分析
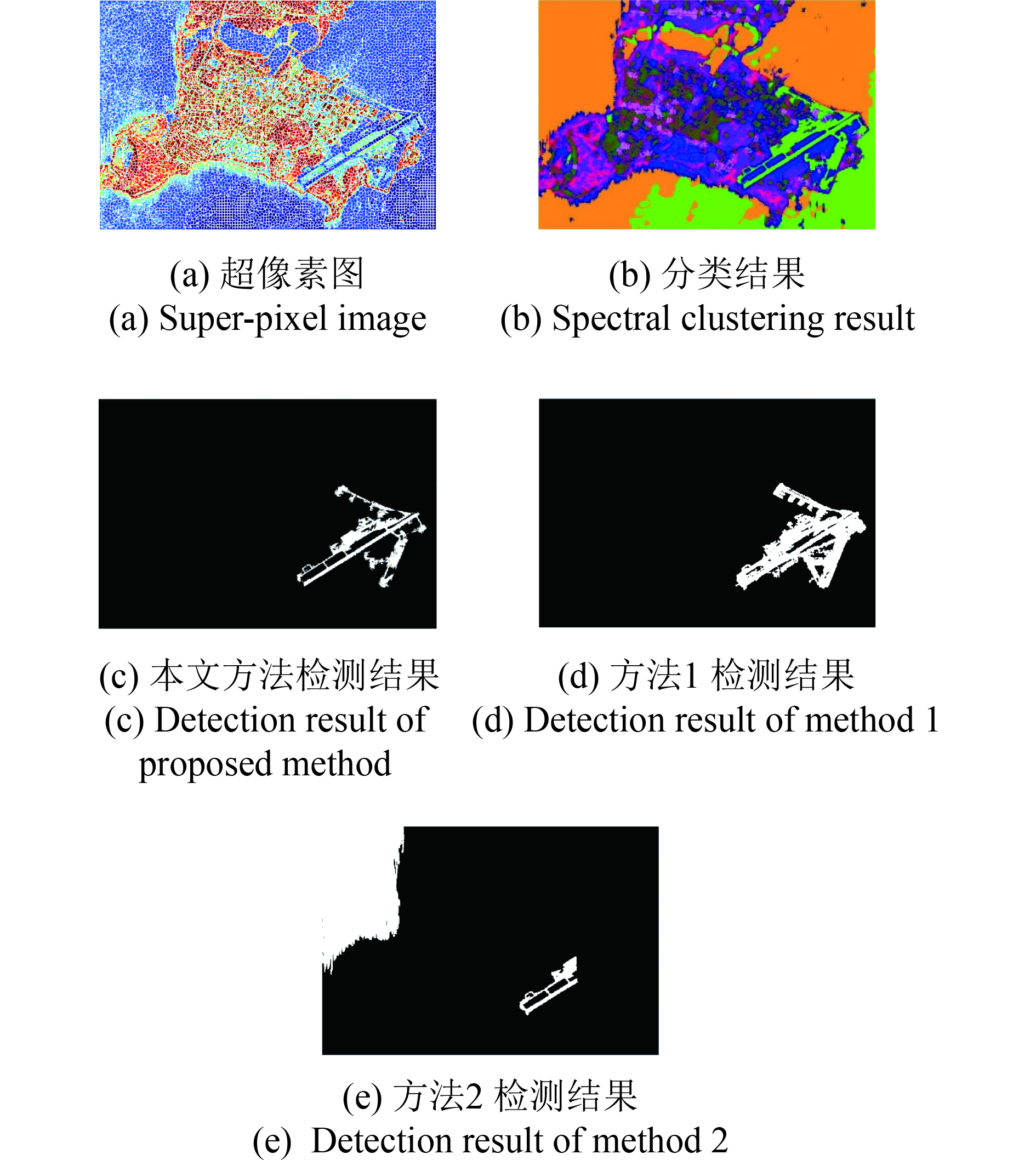
为验证本文所提算法的有效性,对多幅含有机场的PolSAR图像实测数据进行了实验,并与晋瑞锦等(2014)和Han等(2016)提出的方法(下文分别称为方法1和方法2进行了对比,鉴于篇幅有限在此给出其中两个代表性的实验结果进行分析。实验运行环境为:Dell2013 B6BVQZ1电脑,内存为4 G,CPU为Corei5-3470,3.2 GHz,实验所用软件为MATLAB 2016a。实验参数设置:尺寸特征阈值设置与韩萍等(2014)所提方法一致,超像素个数K=10000,形态学滤波阈值为M0=459,欧拉数E0=0,平行线对数阈值L0=10。
实验一:数据采用美国UAVSAR系统在美国Honolulu地区上空采集的L波段全极化经过4视处理的数据。图像大小为600×900像素,图像距离分辨率为7.2 m,方向分辨率为4.9 m。该场景中除包括檀香山地区一个机场外,还包含有海洋、建筑物、草地、裸地等多种复杂地物。
图4(a)对应图2(c)
实验二:实验数据采用美国UAVSAR系统在美国Big Island地区上空采集的数据。图像大小为1151×1051像素,图像分辨率及实验参数设置同实验一,该场景中除包括科纳国际机场外,还包括建筑物、农田、森林、灌木、裸地等(图5)。
实验二分析过程同实验一。超像素个数大约为原始图像像素数的百分之一,c=6。最终检测结果如图6(d)所示。对比图6(e)和图6(f),结果显示,方法1及方法2均能有效的检测出机场跑道,本文方法相对于方法2提取结果更加完整。但是,本文算法无需预先设置要分类的类别个数及迭代次数人为干预更少。

实验三:实验数据采用美国UAVSAR系统在美国San Andreas Fault地区上空,采集的数据大小为1051×1151像素,其他参数设置同实验一(图7)。

实验三的分析过程同实验一、二,对比图8(d)、图8(e)、图8(f)可知,本文算法在较少人为干预的情况下与两种对比方法都能够较完整地检测出机场跑道区域。

除了对给出的实验数据进行分析,在同一实验环境且未对算法进行优化的情况下,本算法耗时大约为方法1的1/10、方法2的1/5,如表1所示。综上可知,相对于方法1和方法2,本文所提方法能够自适应地确定地物类别个数,人为干预更少,算法运算速度更快、无虚警、漏警,所以实时性和适用性更好。
表 1 本章算法及对比算法时间统计
Table 1 Execution time of proposed method and comparative method
| /s | |||
| 本章算法 | 方法1 | 方法2 | |
| 数据一 | 178.455 | 2302.002 | 1020.125 |
| 数据二 | 380.410 | 4562.017 | 2599.766 |
| 数据三 | 399.606 | 7681.945 | 3316.572 |
5 结 论
在利用聚类算法提取疑似跑道区域时,提取结果往往受到初始类别数的影响,另外,基于像素点的检测易受到PolSAR图像中固有相干斑噪声的干扰,且当场景复杂时,算法计算量会非常巨大。本文提出的自适应无监督分类的机场跑道区域检测算法,具有以下特点和优点:
(1)利用SLIC算法生成超像素,一方面,生成的超像素会平滑强的噪声点,降低相干斑噪声的影响;另一方面,图像中超像素的个数将远小于原始像素点的个数,这样虽然牺牲了一定的分辨率,但是可以大幅降低算法的时间成本。
(2)利用VAT和DBE算法对待测图像中实际包含的地物类别数进行估计,提高了算法的自适应性。
(3)利用谱聚类的方法提取疑似跑道区域,与其他传统聚类算法相比,虽然谱聚类需具有更大的时间复杂度和空间复杂度,但是也同样具有更精确的分类性能,而且在将超像素作为处理单元的前提下,谱聚类稍高的计算成本对整体而言并没有太大的影响。
(4)本文算法充分利用了地物目标的极化特性作为分类特征,有助于提高分类的准确性。实验结果表明,本文算法虽然在丢失了一定分辨率的情况下,仍然得到了结构完整,轮廓清晰的检测结果,且大幅降低了算法耗时,提高了计算效率。
需要指出的是,虽然超像素可以有效降低时间成本,并对相干斑噪声有一定的抑制作用,但仍然会造成丢失细节的问题。在全部的检测结果中,小部分机场的细节略有损失,这可能设定与超像素个数有关,本文目前采取的做法是经验选取,后续或将结合图像本身信息研究超像素个数选取的相关方法。
参考文献(References)
-
Achanta R, Shaji A, Smith K, Lucchi A, Fua P and Süsstrunk S. 2012. SLIC superpixels compared to state-of-the-art superpixel methods. IEEE Transactions on Pattern Analysis and Machine Intelligence, 34 (11): 2274–2282. [DOI: 10.1109/TPAMI.2012.120]
-
Ai S F, Yan J H, Li D L, Xu J F and Shen J. 2017. An algorithm for detecting the airport runway in remote sensing image. Electronics Optics and Control, 24 (2): 43–46. [DOI: 10.3969/j.issn.1671-637x.2017.02.009] ( 艾淑芳, 闫钧华, 李大雷, 许俊峰, 沈静. 2017. 遥感图像中的机场跑道检测算法. 电光与控制, 24 (2): 43–46. [DOI: 10.3969/j.issn.1671-637x.2017.02.009] )
-
Aytekin Ö, Zöngür U and Halici U. 2013. Texture-based airport runway detection. IEEE Geoscience and Remote Sensing Letters, 10 (3): 471–475. [DOI: 10.1109/LGRS.2012.2210189]
-
Bezdek J C and Hathaway R J. 2002. VAT: a tool for visual assessment of (cluster) tendency//Proceedings of the 2002 International Joint Conference on Neural Networks. Honolulu, HI, USA: IEEE: 2225-2230 [DOI: 10.1109/IJCNN.2002.1007487]
-
Budak Ü, Halıcı U, Şengür A, Karabatak M and Xiao Y. 2016. Efficient airport detection using line segment detector and fisher vector representation. IEEE Geoscience and Remote Sensing Letters, 13 (8): 1079–1083. [DOI: 10.1109/LGRS.2016.2565706]
-
Che M Q, Samat A, Du P J, Luo J Q and Bao R. 2016. Urban man-made target extraction from Quad-PolSAR imagery with roll-invariant parameters. Journal of Remote Sensing, 20 (2): 303–314. [DOI: 10.11834/jrs.20165098] ( 车美琴, 阿里木•赛买提, 杜培军, 罗洁琼, 鲍蕊. 2016. 利用旋转不变特征提取全极化SAR影像人工地物. 遥感学报, 20 (2): 303–314. [DOI: 10.11834/jrs.20165098] )
-
Ebubekir T and Hasan S B. 2017. Airport detection by combining geometric and texture features on RASAT satellite images//2017 25th Signal or Processing and Communications Application Conference (STU), Antalya, 2017: 1-4 [DOI: 10.1109/SIU.2017.7960185]
-
Fowlkes C, Belongie S, Chung F and Malik J. 2004. Spectral grouping using the Nystrom method. IEEE Transactions on Pattern Analysis and Machine Intelligence, 26 (2): 214–225. [DOI: 10.1109/TPAMI.2004.1262185]
-
Han P, Cheng Z and Chang L. 2016. Automatic runway detection based on unsupervised classification in polsar image//2016 Integrated Communications Navigation and Surveillance (ICNS). Herndon, VA, USA, IEEE: 6E3-1-6E3-8 [DOI: 10.1109/ICNSURV.2016.7486365]
-
Han P, Chang L, Cheng Z and Shi Q Y. 2016. Runways detection based on h/q decomposition and iterative Bayesian classification . Systems Engineering and Electronics, 38 (9): 2048–2054. [DOI: 10.3969/j.issn.1001-506X.2016.09.12] ( 韩萍, 常玲, 程争, 石庆研. 2016. 基于h/q分解和贝叶斯迭代分类的跑道检测算法 . 系统工程与电子技术, 38 (9): 2048–2054. [DOI: 10.3969/j.issn.1001-506X.2016.09.12] )
-
Han P, Xu J S and Zhao A J. 2014. PojlSAR image runways detection based on multi-stage classification. Systems Engineering and Electronics, 36 (5): 866–871. [DOI: 10.3969/j.issn.1001-506X.2014.05.09] ( 韩萍, 徐建飒, 赵爱军. 2014. 基于多级分类的PolSAR图像机场跑道检测. 系统工程与电子技术, 36 (5): 866–871. [DOI: 10.3969/j.issn.1001-506X.2014.05.09] )
-
Han X Q and Du H Y. 2016. Detecting airports in high-resolution Mapping Satellite using edge tracing-SURF method. Journal of Image and Graphics, 13 (8): 1079–1083. [DOI: 10.11834/jig.20161008] ( 韩晓青, 杜红悦. 2016. 边缘追踪模型与SURF检测结合提取天绘影像机场目标. 中国图象图形学报, 13 (8): 1079–1083. [DOI: 10.11834/jig.20161008] )
-
He Y, Xu X, Sun H and Yang W. 2004. Detection of airport runways in airborne SAR images. Journal of Wuhan University (Natural Science Edition), 50 (3): 393–396. [DOI: 10.3321/j.issn:1671-8836.2004.03.030] ( 何勇, 徐新, 孙洪, 杨文. 2004. 机载SAR图像中机场跑道的检测. 武汉大学学报(理学版), 50 (3): 393–396. [DOI: 10.3321/j.issn:1671-8836.2004.03.030] )
-
Hu J J, Zhang J X, Xu J Y and Zhao Z. 2018. Approach for rapid segmentation of coastline based on the C-V model using the exponential sequence of multi-scale SAR images. Journal of Remote Sensing, 22 (3): 478–486. [DOI: 10.11834/jrs.20187304] ( 胡娇静, 张继贤, 许君一, 赵争. 2018. 指数型多尺度影像序列的C-V模型SAR岸线快速自动分割. 遥感学报, 22 (3): 478–486. [DOI: 10.11834/jrs.20187304] )
-
Jia C L, Zhou X G, Ji K F and Kuang G Y. 2007. Extraction of runways in complex synthetic aperture radar images. Signal Processing, 23 (3): 374–378. [DOI: 10.3969/j.issn.1003-0530.2007.03.013] ( 贾承丽, 周晓光, 计科峰, 匡纲要. 2007. 复杂SAR场景中机场跑道的提取. 信号处理, 23 (3): 374–378. [DOI: 10.3969/j.issn.1003-0530.2007.03.013] )
-
Jin R J, Zhou W and Yang J. 2014. Airport automatic detection in large-scale polarimetric SAR images. Journal of Tsinghua University (Science and Technology), 54 (12): 1588–1593. [DOI: 10.16511/j.cnki.qhdxxb.2014.12.005] ( 晋瑞锦, 周伟, 杨健. 2014. 大场景下的极化SAR机场检测. 清华大学学报(自然科学版), 54 (12): 1588–1593. [DOI: 10.16511/j.cnki.qhdxxb.2014.12.005] )
-
Lee J S and Pottier E. 2009. Polarimetric Radar Imaging: From Basics to Applications. New York: CRC Press: 89-385
-
Liu L, Yang X Z, Zhou F and Lang W H. 2017. Non-local filtering for polarimetric SAR data based on three dimensional patch matching wavelet transform. Journal of Remote Sensing, 21 (2): 218–227. [DOI: 10.11834/jrs.20176257] ( 刘留, 杨学志, 周芳, 郎文辉. 2017. 3维块匹配小波变换的极化SAR非局部均值滤波. 遥感学报, 21 (2): 218–227. [DOI: 10.11834/jrs.20176257] )
-
Liu N Y, Cui Z Y, Cao Z J, Pi Y M and Dang S H. 2018. Airport detection in large-scale SAR images via line segment grouping and saliency analysis. IEEE Geoscience and Remote Sensing Letters, 15 (3): 434–438. [DOI: 10.1109/LGRS.2018.2792421]
-
Mullissa A G, Tolpekin V and Stein A. 2017. Scattering property based contextual PolSAR speckle filter. International Journal of Applied Earth Observation and Geoinformation, 63 : 78–89. [DOI: 10.1016/j.jag.2017.07.011]
-
Ng A Y, Jordan M I and Weiss Y. 2001. On spectral clustering: analysis and an algorithm//Proceedings of the 14th International Conference on Neural Information Processing Systems: Natural and Synthetic. Vancouver, British Columbia, Canada: ACM: 849-856
-
Paes R L, Lorenzzetti J A and Gherardi D F M. 2010. Ship detection using TerraSAR-X images in the Campos basin (Brazil). IEEE Geoscience and Remote Sensing Letters, 7 (3): 545–548. [DOI: 10.1109/LGRS.2010.2041322]
-
Qiao Y Q, Xiao J H, Huang Y H and Yin K Y. 2016. Extraction algorithm for airport region in spaceborne SAR imagery based on improved randomised hough transform. Electronic Measurement Technology, 39 (2): 56–60. [DOI: 10.3969/j.issn.1002-7300.2016.02.013] ( 乔寅骐, 肖健华, 黄银和, 尹奎英. 2016. 基于改进RHT的SAR图像机场区域提取算法. 电子测量技术, 39 (2): 56–60. [DOI: 10.3969/j.issn.1002-7300.2016.02.013] )
-
Tian S R, Sun G Y, Wang C and Zhang H. 2007. A ship detection method in SAR image based on gravity enhancement. Journal of Remote Sensing, 11 (4): 452–459. [DOI: 10.11834/jrs.20070463] ( 田巳睿, 孙根云, 王超, 张红. 2007. 基于引力场增强的SAR图像舰船检测方法研究. 遥感学报, 11 (4): 452–459. [DOI: 10.11834/jrs.20070463] )
-
Uhlmann S and Kiranyaz S. 2014. Integrating color features in Polarimetric SAR image classification. IEEE Transactions on Geoscience and Remote Sensing, 52 (4): 2197–2216. [DOI: 10.1109/TGRS.2013.2258675]
-
Wang C C, Wang Y and Liao M S. 2010. Polarimetric characteristics analysis of ship target and its azimuth ambiguities based on PolSAR images//International Conference on Multimedia Technology. Ningbo, China, IEEE: 1-4 [DOI: 10.1109/ICMULT.2010.5631342]
-
Wu Z S, Han B and Zhou C P. 2014. The improved method for azimuth ambiguity suppression in SAR image. Bulletin of Surveying and Mapping (S1): 149–152. [DOI: 10.13474/j.cnki.11-2246.2014.0634] ( 吴正升, 韩冰, 周春平. 2014. 一种改进的SAR图像方位模糊抑制方法. 测绘通报 (S1): 149–152. [DOI: 10.13474/j.cnki.11-2246.2014.0634] )
-
Xing X L, Chen Q H, Xu Q, Yang S and Liu X G. 2017. Nonlocal means filtering for polarimetric SAR images based on heterogeneity. Journal of Remote Sensing, 21 (3): 434–441. [DOI: 10.11834/jrs.20176114] ( 行晓黎, 陈启浩, 徐乔, 杨帅, 刘修国. 2017. 顾及目标异质性的极化SAR图像非局部均值滤波. 遥感学报, 21 (3): 434–441. [DOI: 10.11834/jrs.20176114] )
-
Zhang J F, Zhu B, Zhang P, Wang M C and Liu T. 2018. Polarimetric SAR imagery target CFAR detection analytical algorithm with Wishart distribution. Acta Electronica Sinica, 46 (2): 433–439. [DOI: 10.3969/j.issn.0372-2112.2018.02.024] ( 张嘉峰, 朱博, 张鹏, 王明春, 刘涛. 2018. Wishart分布情形下极化SAR图像目标CFAR检测解析方法. 电子学报, 46 (2): 433–439. [DOI: 10.3969/j.issn.0372-2112.2018.02.024] )
-
Zhang Y H, Li Y, Zhao X M and Zhao Q H. 2016. ECM-based segmentation for multi-look SAR image. Journal of Remote Sensing, 20 (6): 1391–1401. [DOI: 10.11834/jrs.20165288] ( 张英海, 李玉, 赵雪梅, 赵泉华. 2016. ECM算法的多视SAR影像分割. 遥感学报, 20 (6): 1391–1401. [DOI: 10.11834/jrs.20165288] )


