

|
收稿日期: 2018-02-06
基金项目: 国家自然科学基金(编号:61601298)
第一作者简介: 吕旺,1983年生,男,高级工程师,研究方向为卫星图像导航与配准、卫星总体设计的理论和技术。E-mail:lvwang509@126.com
|
摘要
为进一步提高观测频次和信噪比,近年来各国新一代静止气象卫星均采用三轴稳定工作模式对地扫描成像。为了精确提取遥感目标物所在地点关于地表、云和大气状态的定量参数产品,必须要解决图像配准和定位问题。轨道漂移运动引起卫星视轴在地球表面上移动,导致连续图像之间产生相对位移,影响云图动画的图像配准精度。以2016年12月发射的中国风云四号卫星成像仪为研究对象,给出了图像参考基准的严密定义,研究了一种轨道运动补偿OMC(Orbit Motion Compensation)方法。通过给成像仪2维扫描机构增加转角补偿的方法在卫星上实时引导视线扫描路径,卫星相当于在理想轨道位置的视角成像。得到的遥感图像均被配准到地球固定网格FG(Fixed Grid),保持相对固定的几何定位关系。由于这种在卫星上完成的补偿剥离了L0级图像数据与卫星轨道测量信息之间的关系,从根源上保证了原始图像的长周期定位稳定性。为证明方法的正确性,利用风云四号卫星在轨测试的遥感图像L0级数据进行了试验验证。结果表明,云图动画中南北方向相对运动距离由973.0 μrad缩小至75.6 μrad,东西方向由205.8 μrad缩小至81.2 μrad。星上轨道运动补偿有效削弱了周期性轨道运动对图像定位与配准的干扰,显著提升图像配准精度。针对未来带有长线阵的新型静止卫星成像仪发展趋势,分析了进行星上轨道运动补偿时引起的长线阵探测器边缘像元误差问题,提出了采用电推进系统对卫星轨道倾角进行高精度保持控制来降低边缘误差的解决方案。
关键词
静止气象卫星, 风云四号, FY-4, 图像配准, INR, 轨道运动补偿, OMC
Abstract
In recent years, a new generation of stationary meteorological satellites in various countries has adopted the three-axis stabilized mode of operation to scan the Earth for further improvement of observation frequency and signal–noise ratio. Image registration and navigation problems must be solved to accurately extract quantitative parameters of the Earth’s surface, clouds, and atmosphere at remote sensing target locations. Orbital drift movement is one of the main causes of satellite line-of-sight movement on the Earth’s surface. The relative movement generated between consecutive images affects the image registration accuracy of cloud animation. In this study, the imager on the Chinese FY-4 satellite that was launched in December 2016 is used as the research object. Moreover, a strict definition of image reference is given, and an orbital motion compensation method (OMC) is studied. By adding scan compensation to the imager 2-D scanning mechanism, the scanning path of the line of sight is navigated on the satellite in real time. Satellites are equivalent to viewing at ideal orbital positions. As a result, satellite remote sensing images are accurately registered to the Earth-fixed grid, and a relatively fixed geometric relationship is maintained. The correlation between L0 data and the measurement information of satellite orbit is removed due to the compensation performed on the satellite. Therefore, the long-term registration stability of the original image is guaranteed from the root. L0 remote sensing data from the FY-4 on-orbit test are used for experimental verification to prove the accuracy of the method. The results show that the relative movement of the north–south directions of the cloud animation is reduced from 973.0 μrad to 75.6 μrad (3σ) and that of the east–west direction is reduced from 205.8 μrad to 81.2 μrad (3σ). The interference of the orbital motion on the image navigation and registration is effectively reduced by the OMC on the satellite. In view of the development trend of the future imager of the geostationary meteorological satellite, the problem of the edge pixel error of the long aperture array detector caused by satellite orbital motion compensation is analyzed. Furthermore, a solution to reduce the edge error by maintaining the satellite near 0° inclination using an electric propulsion system is proposed.
Key words
geostationary meteorological satellite, Fengyun-4, FY-4, image registration, INR, orbital motion compensation, OMC
1 引 言
数值天气预报需要使用卫星图像动画对云和地表目标进行精确的定位和追踪,从而了解天气系统的位置、结构和生命史,对它们进行预测;监视地表的状态,分析环境的变化和可能发生的灾情(唐世浩 等,2016)。最近几年,为进一步提高静止气象卫星的观测频次和信噪比,美国、欧洲、日本、俄罗斯、中国等国家研制的静止气象卫星大多放弃自旋稳定,转变为采用三轴稳定工作模式,通过成像仪器内部二维扫描机构的往复扫描实现对地球全圆盘覆盖成像(董瑶海,2016;Schmit 等,2017)。
为从气象卫星遥感观测数据中精确提取遥感目标物所在地点的关于地表、云和大气状态的定量参数产品,必须要解决图像配准和定位问题(Lu 等,2008)。即确定和保持图像上每一个观测像元所在的地理经纬度位置(许健民 等,2010)。由于受到地球引力摄动的影响,地球静止卫星的轨道位置会发生漂移(章仁为,1998),主要体现在由倾角引起的南北漂移和由偏心率引起的东西漂移,且具有长周期变化的特点(Kamel 等,1987)。卫星轨道漂移引起视轴在地球表面上移动,导致图像之间发生相对运动,效果相当于移动的相机拍摄固定的物体。Carr(2005)分析了高倾角静止卫星对地成像覆盖区域的变化特性。在这种条件下获得的图像信息存在相对位移,相邻图像的同一观测目标在空间位置上并不连续,称为帧间配准FFR(Frame-to-Frame Registration)误差。在数值天气预报反演分析时,图像的地理定位误差影响定量化应用(唐飞 等,2016)。比如,帧间配准误差不利于生成稳定的连续云图动画。特别是在对剧烈变化的天气现象进行高频次的连续观测时,希望图像中的固定目标(如陆地)保持在相同的位置,才能更准确的跟踪和预报移动目标路径(Schmit 等,2017)。这就需要采取一定方法对轨道运动进行补偿或校正,以提高天气预报的定位精度。
静止卫星的重要特性是与地球近似保持静止状态。当卫星一直处于标称理想轨道位置时,所成的地球图像应固定不变。这样的图像可作为卫星实际工作的基准,称之为“固定网格”FG(Fixed Grid) (Carlomusto,2017)。固定网格可以将仪器的分辨率匹配到地球表面上的空间尺度,并去除了轨道、姿态等时间参量的影响。当卫星处于固定网格成像模式中,卫星图像的像素与地理经纬度保持一种固定的对应关系,下传的图像不再需要与卫星轨道和姿态测量信息关联使用。用户得到的L0数据就像是利用理想的卫星平台和理想的遥感仪器从理想的标称轨道位置观测获得。在固定网格云图动画中,陆表地物始终保持固定,只有云等活动目标才会移动(Tehranian 等,2008;Hogan 等,2014)。
为了在气象卫星观测中使用固定网格图像,美国从第2代静止业务环境卫星GOES(Geostationary Operational Environmental Satellite)开始研究卫星图像导航与配准技术INR(Image Navigation and Registration),采用了一种图像运动补偿方法IMC(Image Motion Compensation),在星上通过引导视轴的绝对指向来矫正姿态、轨道、热变形等干扰因素对图像几何定位产生的影响(Carr,2009;Virgilio,2015;Kamel 等,2018)。美国2005年—2010年发射的GOES-N~P系列卫星在间隔90分钟两帧图像的帧间配准指标达到42 μrad(3σ),2016年11月发射的GOES-R卫星定位指标为28 μrad(3σ) (Krimchansky,2014)。
2016年12月11日,中国第2代静止气象卫星的首发星风云四号发射升空(张志清 等,2016),并于12月29日生成首张地球全圆盘图。卫星装载了多种观测仪器(图1),包括先进的静止轨道辐射成像仪AGRI(Advanced Geosynchronous Radiation Imager),干涉式大气垂直探测仪GIIRS(Geosynchronous Interferometric Infrared Sounder)、闪电成像仪LMI(Lightning Mapping Imager)、空间环境监测仪器包SEP(Space Environment Package)等,可提供地球和云层的高精度定量图像以及高质量空间数据(陆风 等,2017;张志清 等,2017;Yang 等,2017)。为了抵消姿态、轨道等干扰因素对图像的影响,风云四号卫星采用了一种成像导航配准方法,利用已知的误差源测量信息为成像视线的移动路径进行导航,在成像仪扫描成像的过程中实时消除各项干扰源对视线的影响(董瑶海,2016;Lyu 等,2017b;Shang 等,2017),其中包括一种轨道运动补偿方法OMC(Orbit Motion Compensation)。

本文以风云四号卫星成像仪为研究对象,首先给出了风云四号成像仪固定网格的严密定义,建立了标称理想状态下静止成像仪扫描镜转角坐标与地表目标地理坐标之间的地球固定网格映射关系。其次,当卫星处于实际位置时,根据轨道参数计算了视轴指向预期地表目标时所需的扫描镜转角。将差值以补偿量的形式加到成像仪原有的扫描运动规律,从而在卫星上实现对轨道漂移干扰的自动修正。利用风云四号卫星在轨成像测试的结果证明了本方法的正确性。最后,针对未来带有长线阵的新型静止卫星成像仪,分析了轨道运动补偿引起的边缘像元拉伸—压缩畸变问题,并提出了解决方案。
2 静止成像仪的地球固定网格
GOES-R卫星的产品定义和用户指南(Carlomusto,2017)中描述了固定网格映射关系,可以从ABI的东西镜转角和南北镜转角转到地球上目标点的地理经纬度以及反变换。欧洲第3代静止气象卫星MTG(Meteosat Third Generation)采用了CGMS规范(EUMETSAT,2013)中规定的映射转换关系。因对成像仪主视轴的几何光学描述方式不同,两种映射关系对于相同转角坐标映射到地球的网格存在一定差异。风云四号卫星与GOES-R卫星成像仪的扫描机构均采用双镜方案,选择的固定网格与GOES-R类似。与之前美国和欧洲的研究成果相比,本文给出更严密的定义:
当卫星位于赤道平面与定点经度半圈平面交线上、与地心距离为42164.172 km(二体问题地球静止轨道卫星地心距),姿态角为0,成像仪与星敏感器内部和外部都没有安装误差和热变形时,2维扫描镜转到每组角度,探测器面阵上的像元与地面虚拟网格对应。这种标称理想情况生成的由多个网格拼接组成的地球图像称为地球固定网格图像。
地球固定网格的本质是卫星扫描镜转角坐标与对应地表目标的地理坐标之间的投影关系(图2)。卫星实际遥感图像与固定网格中已知目标的匹配程度是评价图像几何定位和配准精度的标准。
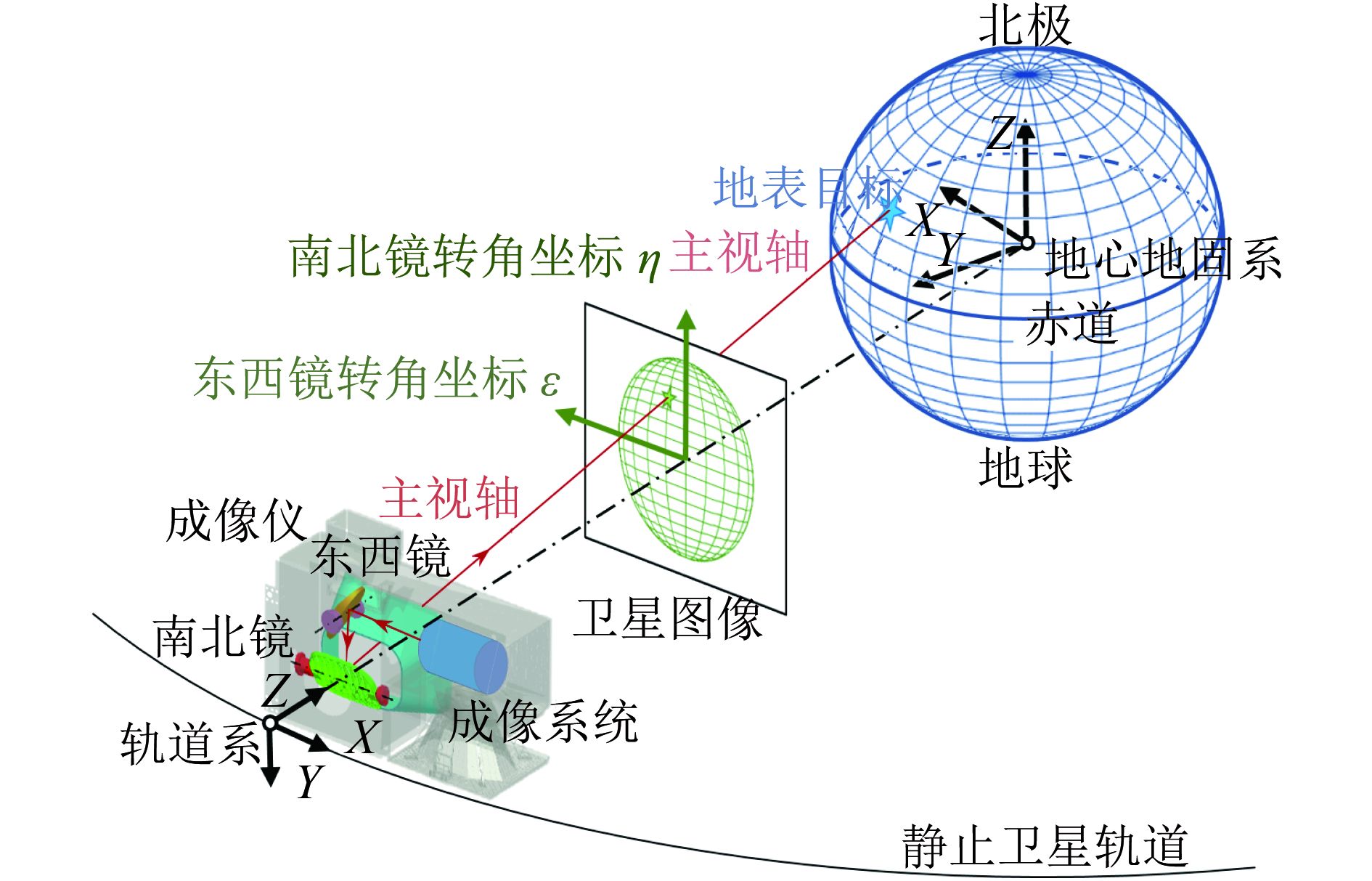
为了在星上实现成像补偿,需要进一步描述地球固定网格的理论表达式。由于成像仪探测器线阵张角不超过0.0005 rad(约1.7′),可近似地用中心像元的主视轴代表整个线阵列上其他像元的视轴。对于如图2所示的带有双扫描镜反射系统的风云四号卫星成像仪,在不考虑仪器光学畸变和卫星平台姿态运动的称情况下,当东西镜转角为ε,南北镜转角为η时,成像仪主视轴单位矢量在卫星轨道系下的分量(下标o代表矢量在卫星轨道系的投影)表达式为(沈毅力 等,2014)
| $ {{{p_{\rm o}}}} = \left[ {\begin{array}{*{20}{c}} { - \sin 2\varepsilon } \\ { - \cos 2\varepsilon \sin 2\eta } \\ {\cos 2\varepsilon \cos 2\eta } \end{array}} \right] $ | (1) |
则成像仪主视轴单位矢量在地心地固系(下标e代表矢量在地心地固系的投影)的分量可表示为
| $ {{{p}}_{\rm{e}}} = {{{A}}_{{\rm{eo}}}}{{{p}}_{\rm{o}}} $ | (2) |
式中,Aeo为轨道系到地心地固系的坐标转换矩阵,标称静止轨道的
| $ {\hat {{A}}_{{\rm{eo}}}}=\left[ {\begin{array}{*{20}{c}} { - \sin {\lambda _0}}&0&{ - \cos {\lambda _0}} \\ {\cos {\lambda _0}}&0&{\sin {\lambda _0}} \\ 0&{ - 1}&0 \end{array}} \right] $ | (3) |
式中,λ0为静止卫星标称定点位置经度。由于标称静止轨道与地固系保持相对静止的固定关系,
标称卫星在地心地固系的位置坐标分量为
| $ {\hat {{R}}_{\rm{e}}} = \left[ {\begin{array}{*{20}{c}} {\hat r\cos {\lambda _0}} \\ {\hat r\sin {\lambda _0}} \\ 0 \end{array}} \right] $ | (4) |
式中,r为卫星的地心距,标称轨道时取
定义从成像仪器到地表目标的长度标量为未知数k。如图3所示,成像仪主视轴与地球的交点(即地表目标)的空间位置关系可在地心地固系中被描述为

| $ {\hat {{G}}_{\rm{e}}}\left( k \right) = {\hat {{R}}_{\rm{e}}} + k{\hat{{ p}}_{\rm{e}}} $ | (5) |
式中,
| $ \frac{{{x^2}}}{{a_{\rm{e}}^2}} + \frac{{{y^2}}}{{a_{\rm{e}}^2}} + \frac{{{z^2}}}{{b_{\rm{e}}^2}} = 1 $ | (6) |
式中,地球几何模型采用WGS84椭球模型,半长轴ae=6378.137,半短轴be=6356.75231424518,地心地固系的XOY面为赤道面。将式(5)代入式(6),求解以k为未知数的一元二次方程可知:当根的判别式∆=0时,表明主视轴与地球相切;当∆<0时,表明主视轴指向地球外部,与地球无交点;当∆>0时,表明主视轴指向地球表面,较小的正实数解kans对应的是地球上正对卫星那一面上的成像目标。
将kans代回式(5)可得到卫星处于理想情况下、成像仪扫描镜转角坐标为[ε,η]时的主视轴对应地表目标在地心地固系下的坐标
从以上推导可以看出,当静止卫星在赤道上的标称定点经度位置λ0确定后,标称情况下成像仪扫描镜转角坐标[ε,η]到地表目标地理经纬度坐标[latitude,longitude]的转换关系是一一映射关系,与其他因素无关。
3 轨道运动补偿算法
卫星在轨运行期间,星载计算机实时计算当前规划的扫描镜转角坐标对应的地表目标位置
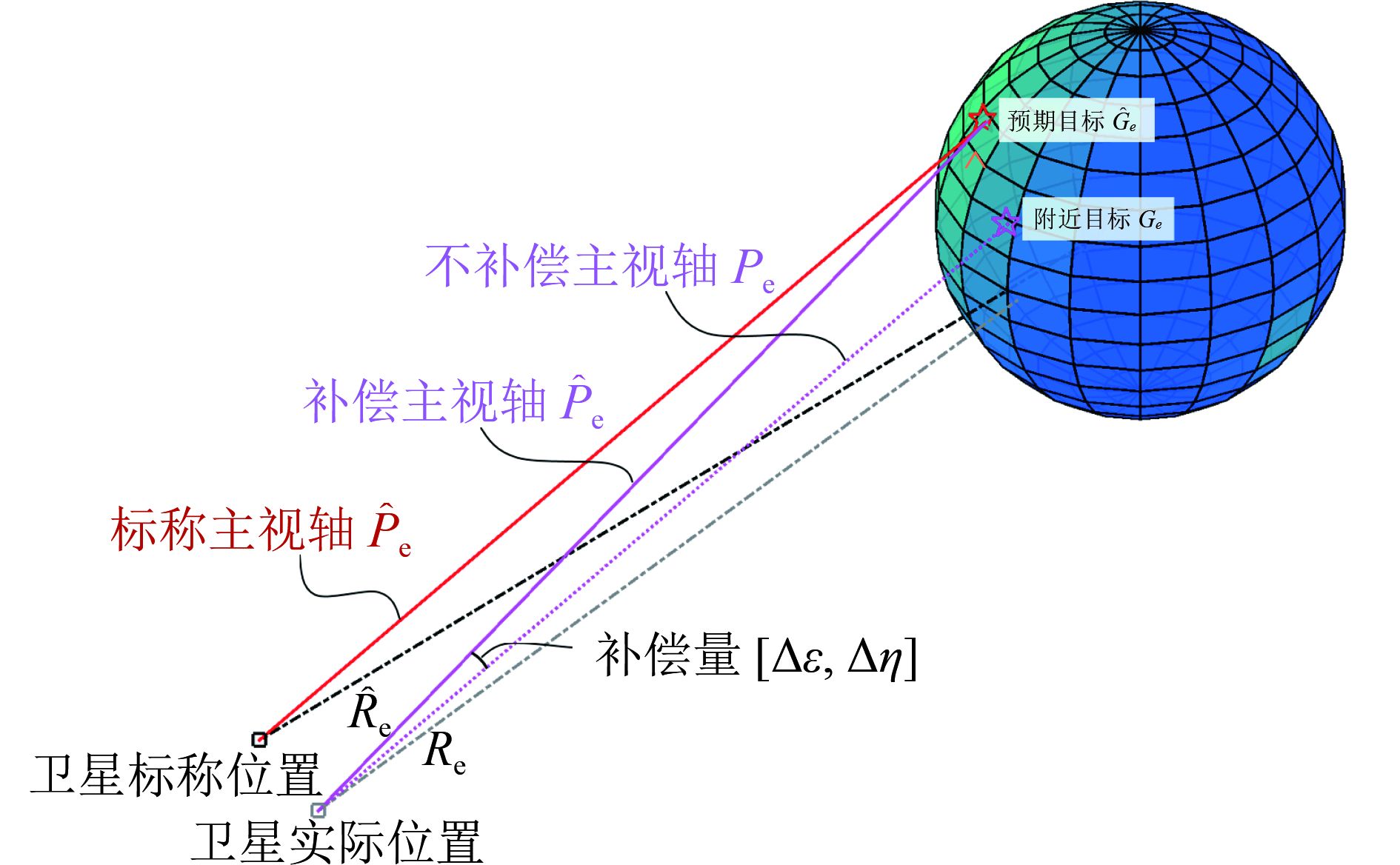
当扫描镜转角坐标为[ε,η]时,根据前述方法计算其对应的固定网格上的地表目标(预期目标)坐标
| $ {\breve{{P} }_{\rm{e}}} = {\hat{{ G}}_{\rm{e}}} - {{{R}}_{\rm{e}}} $ | (7) |
式中,
| $ {\breve{{{p} }}_{\rm{e}}} = \frac{{{{\breve{{{P} }}}_{\rm{e}}}}}{{\left| {{{\breve{{{P} }}}_{\rm{e}}}} \right|}} $ | (8) |
在不考虑卫星姿态运动和仪器变形的情况下,卫星轨道系下主视轴可表示为
| $ {\breve{{{p} }}_{\rm{o}}} = {{A}}_{{\rm{eo}}}^{\rm{T}}{\breve{{{p} }}_{\rm{e}}} $ | (9) |
假设当前位置的卫星应该在扫描镜角度处于坐标
| $ \left\{ \begin{gathered} \breve{\varepsilon } = - \frac{1}{2}\arcsin {{\breve{{{p} }}}_{\rm{o}}}\left( 1 \right) \\ \breve{\eta } = - \frac{1}{2}\arctan \frac{{{{\breve{{{p} }}}_{\rm{o}}}\left( 2 \right)}}{{{{\breve{{{p} }}}_{\rm{o}}}\left( 3 \right)}} \\ \end{gathered} \right. $ | (10) |
可得到轨道运动补偿量的计算公式
| $ \left\{ \begin{gathered} \Delta \varepsilon {\rm{ = }}\breve{\varepsilon } - \varepsilon \\ \Delta \eta {\rm{ = }}\breve{\eta } - \eta \\ \end{gathered} \right. $ | (11) |
实际工程应用时,地面需要将轨道测量信息提前上注卫星,卫星根据轨道的短期递推结果和提前规划的扫描镜转角实时计算补偿量[∆ε, ∆η],并提前发送到成像仪器扫描伺服机构。
4 卫星在轨成像试验结果
由于轨道运动补偿涉及地球几何模型、星地空间位置关系等客观条件,很难在地面通过物理仿真对补偿方法进行验证。风云四号卫星发射入轨后开展了图像导航与配准专项测试,从成像测试结果可以分析OMC正确性。2017年1月9日—11日,地面上注指令开展成像仪对地成像工作模式。成像仪一天最多可完成96幅全圆盘成像,专项测试期间成像仪工作时段为UTC时间23:00—次日10:45,每15 min完成一次对地球全圆盘观测。考虑到卫星定点位置为99.5°,该工作时段对应于星下点当地时间5:38—17:38,是阳光照射条件较好的时段。
1月10日开启了星上OMC功能,对比1月9日和1月11日连续图像的帧间配准关系可分析补偿效果。本文选用成像仪分辨率最高(14 μrad/像元)的550—750 nm波长探测通道。综合考虑8日—12日的卫星轨道运动情况(图5)、晴空区、地表辐射亮度和地理位置等因素,选取了星下点西北和东南两个区域的部分时段图像进行分析:澳大利亚西北区域(24°S/115°E)在UTC2017年1月8日—11日的图像见图6,斯里兰卡区域(8°N/80°E)在UTC2017年1月9日、11日的图像见图7。



根据卫星轨道运动情况(图5),每天的升交点时间在UTC4:35左右,取每个区域当日UTC4:30所成图像作为基准,其他图像与其对比可分析相对移动距离。利用两幅图像的共同特征点的总体位移矢量表征图像的相对移动关系。一天中多帧图像的相对位移形成连续的移动轨迹:澳大利亚西北区域图像的相对移动轨迹分析结果见图8(a),斯里兰卡区域图像的相对移动轨迹分析结果见图8(b)。卫星轨道确定由地面3点测距和模型递推完成,成像期间的星下点经纬度运动轨迹见图8(c)。
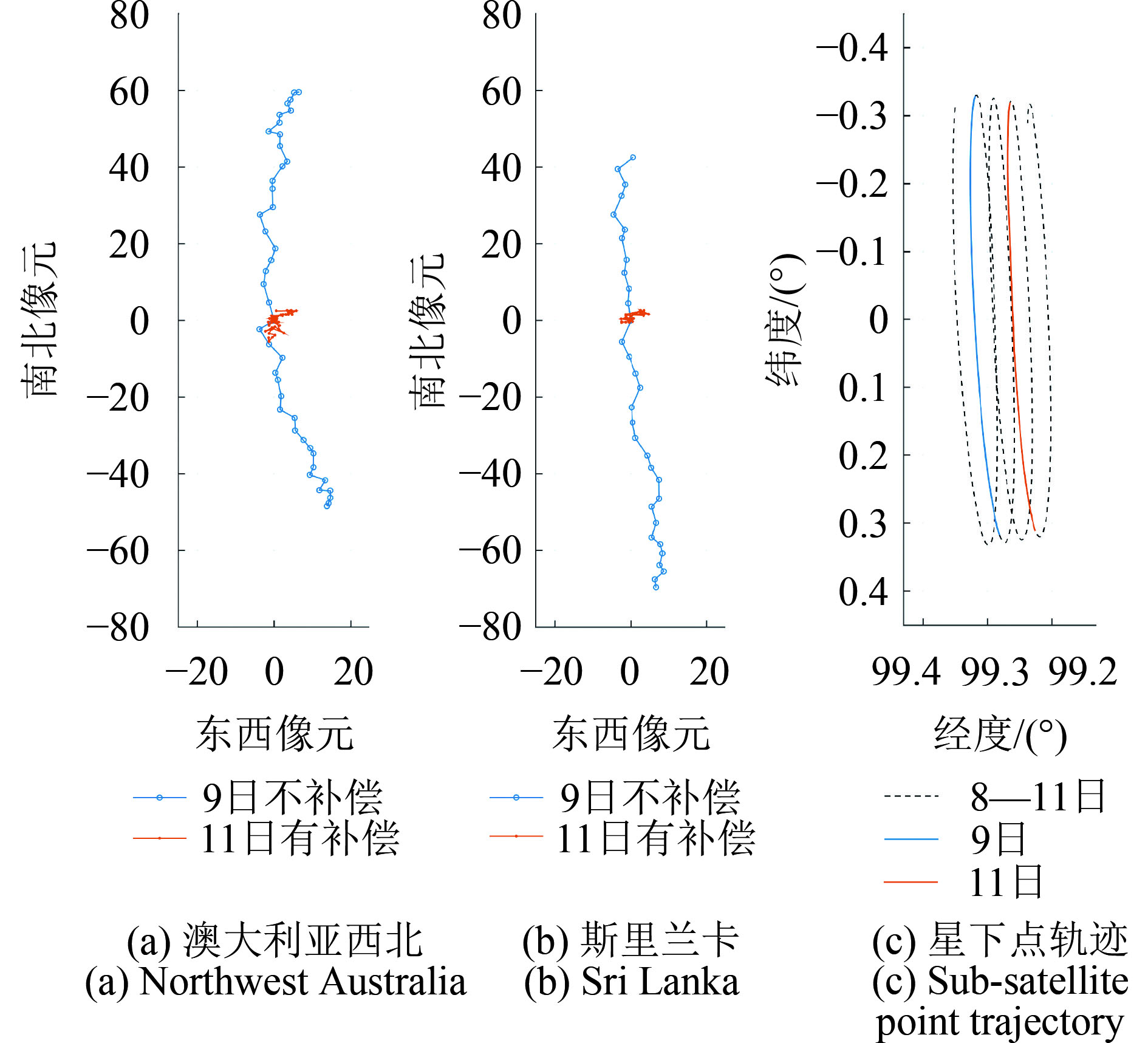
在1月9日—11日这段时期,卫星的轨道倾角大约为0.3°,产生的星下点南北漂移范围约为±0.33°,东西漂移在一天内的变化幅度仅为0.05°,卫星轨道运动以南北漂移为主要趋势。1月9日的图像运动轨迹为从北向南移动,代表成像仪视轴从南往北移动。在该时段星下点的移动轨迹也是从南向北运动,形状相似,说明图像运动的主要因素是卫星轨道漂移引起的视轴移动。
图像相对移动的分析结果如表1所示,补偿前1月9日图像的最大移动距离为:南北69.6像元,东西14.7像元。图9显示了1月11日两区域图像相对移动的统计分析结果。由于开启了星上OMC功能,图像配准精度达到了南北±5.7像元(3σ)、东西±6.4像元(3σ);CE90误差为5.0像元。南北方向偏差从最大973.0 μrad改善至75.6 μrad,东西方向偏差从最大205.8 μrad改善至81.2 μrad。说明卫星轨道运动补偿有效的抵消了轨道漂移运动对卫星视轴的影响,显著提升图像帧间配准精度。
表 1 图像相对移动距离
Table 1 The image movement
| /像元 | ||||
| 成像测试工况 | 东 | 西 | 南 | 北 |
| 澳大利亚西北9日不补偿 | 14.7 | 3.8 | 48.5 | 59.6 |
| 澳大利亚西北11日有补偿 | 5.8 | 2.3 | 5.4 | 2.6 |
| 斯里兰卡9日不补偿 | 8.7 | 4.5 | 69.5 | 42.5 |
| 斯里兰卡11日有补偿 | 4.7 | 2.6 | 0.5 | 2.6 |

图10显示了每天UTC9:30图像与当日UTC4:30基准图像的加速鲁棒特征SURF(Speeded-Up Robust Features)(Bay 等,2008)配准对比结果。其中,红色圆圈表示匹配的特征斑点位置和范围,箭头表示需要通过地面借助轨道确定信息和陆标进行后期处理移动的方向和距离。可以看出,1月9日未开启补偿时期的图像需要在地面处理中移动较大的距离才能与基准图像匹配,而1月11日开启星上OMC后的图像与基准图像配准关系较好。

残余误差主要来自于卫星姿态运动、热变形和仪器扫描伺服机构控制误差。由于2017年1月9日—11日的测试工况仅开启了OMC,其他对姿态、仪器变形的补偿功能尚未开启,该结果仅用于说明OMC的效果,并不是风云四号卫星图像定位配准指标的最终评估结果。风云四号卫星还装备了用于抵消卫星平台姿态运动的“卫星姿态运动补偿”AMC(Atittude Motion Compensation) (Lyu 等,2017a)和用于抵消平台和仪器热变形的“热变形运动补偿”TMC(Thermal Motion Compensation)(Lyu 等,2017b)功能。星上补偿功能全部开启后,风云四号卫星图像定位和配准精度有进一步的提升。
5 对带有长线阵成像仪的适应性
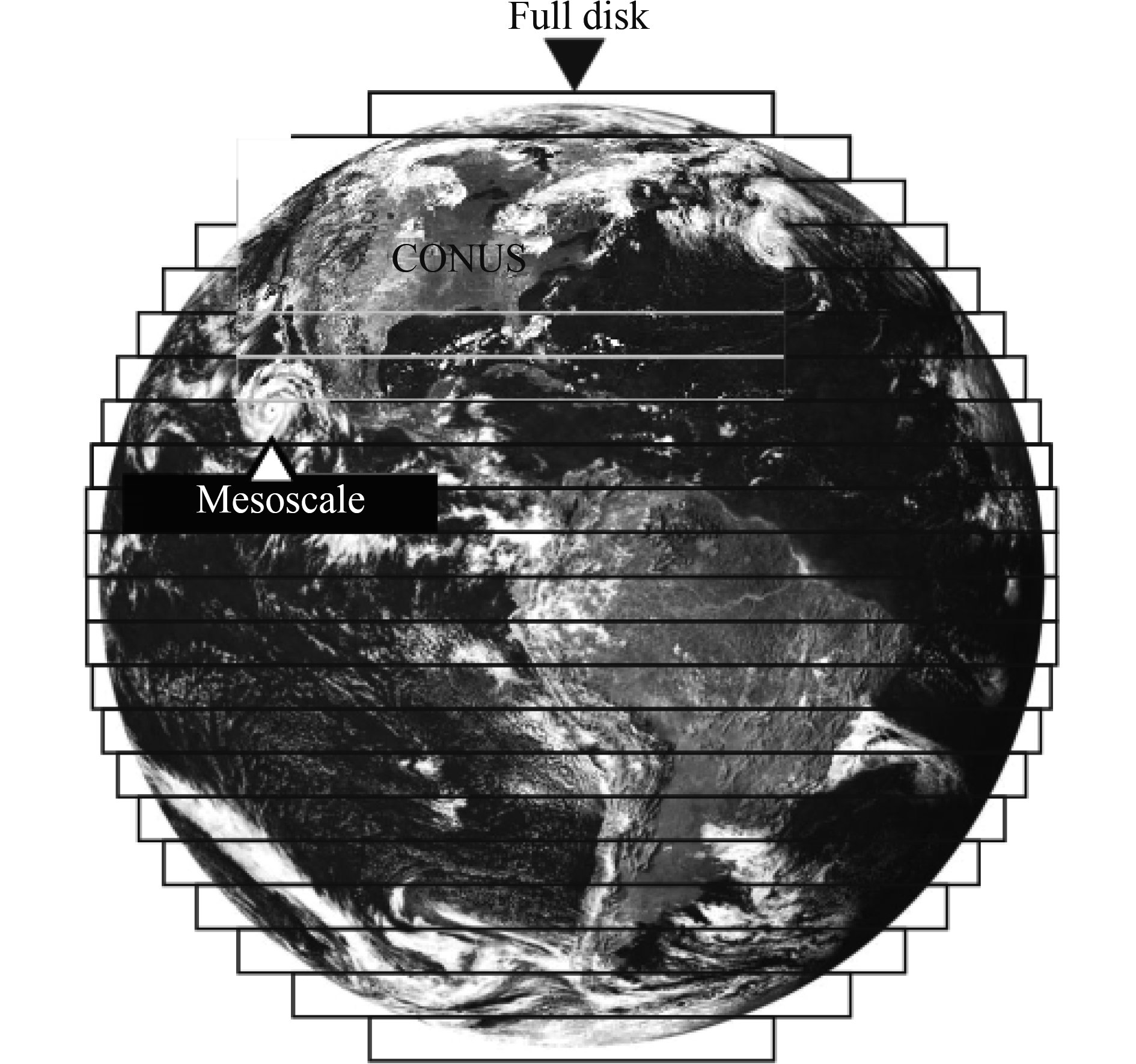
相对于低轨卫星,静止卫星的主要优势就是有较高的时间分辨率,能够高频次的覆盖全球(卢乃锰和谷松岩,2016)。因此,在保证成像质量的前提下不断提高静止气象卫星的成像效率是未来的发展趋势。美国GOES-R卫星的ABI采用1024元的长线阵探测器显著扩大了单行扫描的覆盖范围,将对地覆盖扫描行数缩短至23行,全圆盘成像时间最快需要5 min(图11)(Griffith,2006)。长线阵扫描成像已经成为未来的发展趋势,中国后续研发的静止气象卫星成像仪很可能也采用长线阵探测器。
受到仪器通光口径的限制,较长的探测器列阵就需要放慢扫描速度以获取更长的积分时间。采用慢速扫描有助于提高扫描镜伺服控制精度,有利于增强星上成像补偿量的执行效果。但相对于小视场探测器的轨道运动补偿,长线阵探测器存在拉伸-压缩问题,导致边缘像元的视轴存在误差。当瞬时视场角τ较大时,星上轨道运动补偿虽然能够消除主视轴的地表目标位置误差(图12),但处于探测器边缘的像元仍然会偏离预期指向,分为低纬度误差δLow和高纬度误差δHigh。

产生边缘像元误差是由星地几何特征决定的。地球是一个3维球体,当卫星扫描到地球边缘附近时,像元对应的地面分辨率逐渐变大。像元分辨率与地表目标纬度存在图13关系。
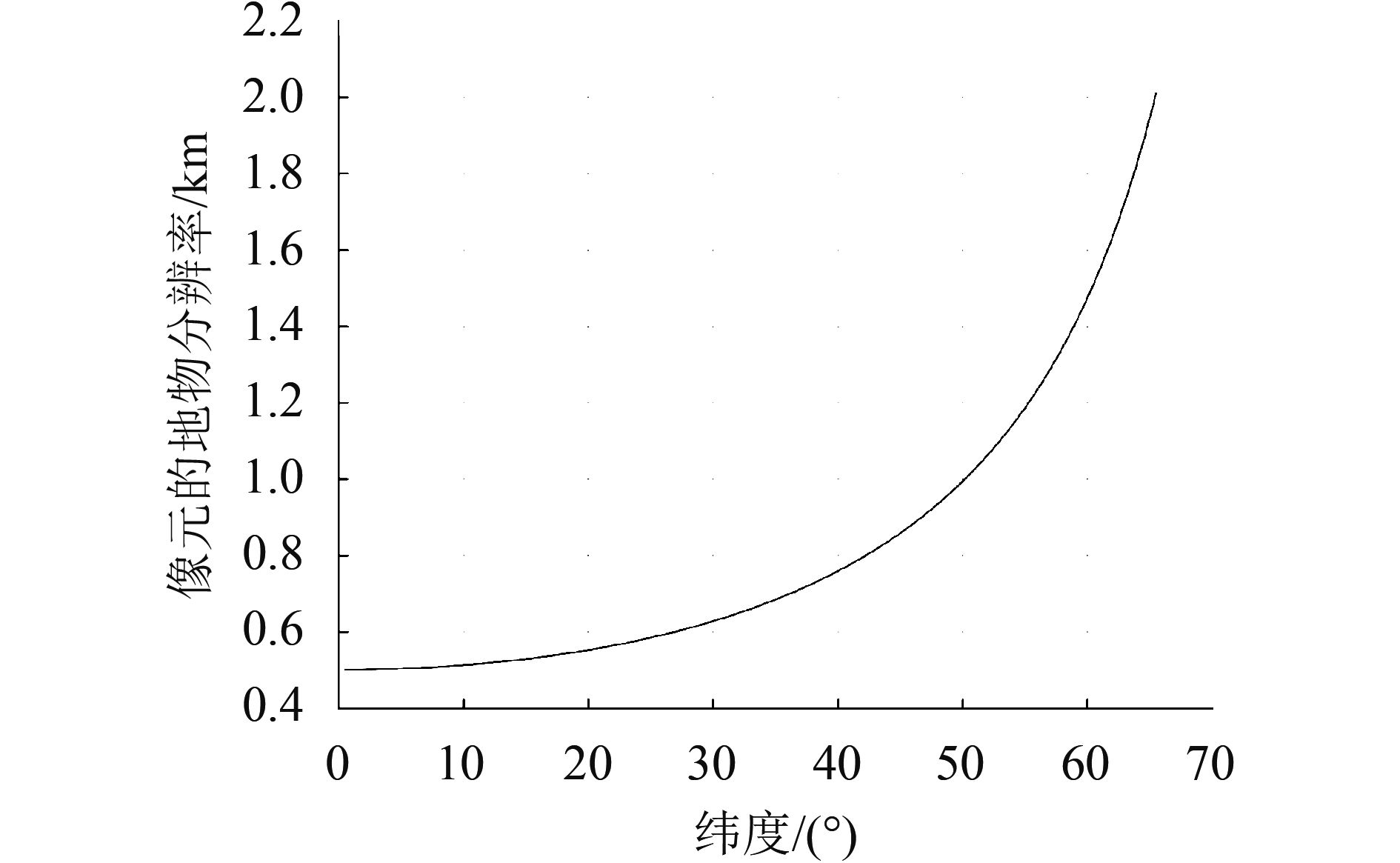
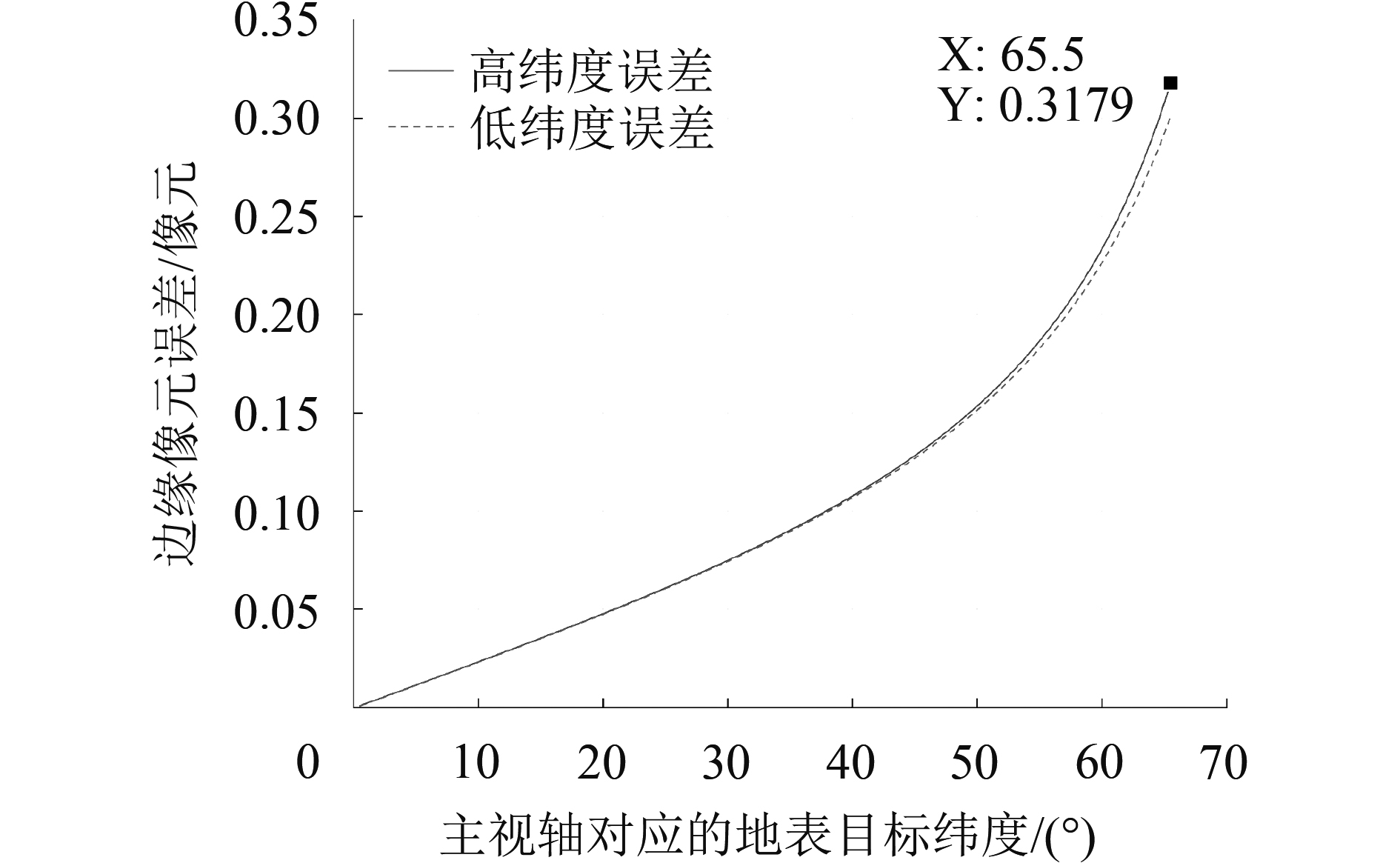
由图13可知,像元对应南北极附近高纬度地区的地物分辨率是星下点的4倍。轨道运动成像补偿是以中心像元对应的主视轴为基准计算补偿量。虽然中心像元补偿到了标称网格上的目标点,但由于像元分辨率随地表目标纬度变化的特性,边缘像元可能仍存在拉伸或压缩。风云四号卫星成像仪采用32元线列阵探测器,瞬时视场为0.000448 rad。当轨道倾角保持在0.3°时,引起的成像仪南北方向边缘像元误差随主视轴对应的地表目标纬度变化的影响最大不超过0.32个像元(图14)。
对于新型的长线阵探测器,以GOES-R的ABI为例,线列阵长度达到1024元,瞬时视场达到0.014336 rad,是风云四号卫星成像仪的32倍。当轨道倾角保持在0.3°时,引起的成像仪南北方向边缘像元误差随主视轴对应的地表目标纬度变化的影响最大可达到11.14个像元(图15)。

可能是基于这种原因,美国GOES-R卫星改变了前一代静止气象卫星GOES-N~P系列的星上补偿方式,而是退而求其次,采用了地面重采样几何矫正的方法实现图像定位与配准(Ellis 等,2008)。但随之带来的是图像重采样对辐射精度的损失和气象遥感产品生产效率的降低。
随着宇航技术的发展,卫星电推进系统日趋成熟。电推进系统可通过实时的小推力控制,使卫星轨道位置保持在较高的精度,如倾角保持在0.01°以内。在这种条件下,根据图12所示的几何关系可知,由轨道漂移引起的图像偏移可达到2个像元,仍然需要进行补偿处理。在进行轨道运动成像补偿时,新型成像仪的长阵列探测器的边缘像元误差可降低至0.38个像元以内(图16)。从而在实现对轨道漂移进行实时在轨成像补偿的同时降低了长线阵探测器边缘像元的补偿误差,一举解决了轨道补偿与边缘像元误差的矛盾。
6 结 论
为了提高静止气象卫星遥感产品的定位与配准精度,使图像之间保持稳定的相对位置关系,本文介绍了一种用于消除静止卫星轨道运动引起图像相对运动的补偿方法。建立了成像几何光学基准,给出了静止卫星成像仪的地球固定网格的严密定义,推导了扫描镜转角坐标与地表目标经纬度的一一映射关系。为了校正轨道运动引起的图像偏移,提出了轨道运动补偿(OMC)方法。卫星在轨运行期间,利用给成像仪扫描镜运动增加补偿量的方式,实时对卫星成像主视轴的绝对指向方向和扫描路径进行导航,可在成像过程中校正轨道运动引起的图像位置偏移。卫星相当于在理想的标称轨道位置视角对地成像,下传的图像不必关联卫星轨道测量信息,直接实现与地物相对关系的配准定位。中国新一代静止气象卫星风云四号卫星发射以后,于2017年1月份开展了轨道运动补偿的测试。成像仪的L0级数据分析结果表明星上OMC有效削弱了周期性轨道运动对图像定位与配准的干扰,图像配准精度达到了南北±5.7像元(3σ)、东西±6.4像元(3σ),CE90误差为5.0像元。说明卫星轨道运动补偿有效的抵消了轨道漂移运动对卫星视轴的影响,显著提升图像帧间配准精度,成功地将云图动画中南北方向图像相对移动的最大位移由973.0 μrad缩小至75.6 μrad(3σ),东西方向由205.8 μrad缩小至81.2 μrad(3σ)。
静止气象卫星后续采用带有长线阵探测器的新型成像仪是未来发展趋势,针对长线阵成像仪分析了轨道补偿时边缘像元的误差特性。为了在对长线阵成像仪进行补偿过程中避免边缘像元拉伸畸变,提出了采用电推进系统进行高精度倾角保持控制的解决方案。当倾角控制在±0.01°范围内时,边缘像元误差低于0.38像元,满足后续卫星任务对图像定位和配准的应用需求。
参考文献(References)
-
Bay H, Ess A, Tuytelaars T and Van Gool L. 2008. Speeded-up robust features (SURF). Computer Vision and Image Understanding, 110 (3): 346–359. [DOI: 10.1016/j.cviu.2007.09.014]
-
Carlomusto M. 2017. Product definition and users’ guide (PUG) volume 5: level 2+ products for geostationary operational environmental satellite R series (GOES-R) core ground segment. CDRL SE-16. Melbourne, Florida: Harris Corporation Government Communications Systems
-
Carr J L. 2009. Twenty-five years of INR. The Journal of the Astro- nautical Sciences, 57 (1/2): 505–515. [DOI: 10.1007/BF03321514]
-
Dong Y H. 2016. FY-4 meteorological satellite and its application prospect. Aerospace Shanghai, 33 (2): 1–8. [DOI: 10.19328/j.cnki.1006-1630.2016.02.001] ( 董瑶海. 2016. 风云四号气象卫星及其应用展望. 上海航天, 33 (2): 1–8. [DOI: 10.19328/j.cnki.1006-1630.2016.02.001] )
-
EUMETSAT. 2013. Coordination Group for Meteorological Satellites LRIT/HRIT Global Specification. CGMS/DOC/12/0017. Darmstadt: CGMS
-
Griffith P C. 2006. ABI delivers significantly increased capabilities over current imagers//Proceedings of the 4th GOES Users’ Conference. Broomfield, Colorado: [s.n.]
-
Hogan D, Werbos A, Bentley J, Kennelly E, Puhl-Quinn P, Tully G, Steinfelt E, Zaccheo T S and Davis W. 2014. Multi-mission remote sensing ground processing algorithms//Proceedings of the 94th AMS Annual Meeting. Atlanta, GA: [s.n.]
-
Kamel A A, Graul D W, Chan F N T and Gamble D W. 1987. Spacecraft camera image registration. U.S., No. 4, 688, 091
-
Kamel A A, Kim H, Yang D, Park C and Woo J. 2018. Generalized image navigation and registration method based on Kalman filter//Advances in Aerospace Guidance, Navigation and Control. Cham: Springer: 609–630 [DOI: 10.1007/978-3-319-65283-2_33]
-
Krimchansky A. 2014. GOES-R Series Concept of Operations (CONOPS). 410-R-CONOPS-0008. NOAA
-
Lu F, Zhang X H, Chen B Y, Liu H, Wu R H, Han Q, Feng X H, Li Y and Zhang Z Q. 2017. FY-4 geostationary meteorological satellite imaging characteristics and its application prospects. Journal of Marine Meteorology, 37 (2): 1–12. [DOI: 10.19513/j.cnki.issn2096-3599.2017.02.001] ( 陆风, 张晓虎, 陈博洋, 刘辉, 吴荣华, 韩琦, 冯小虎, 李云, 张志清. 2017. 风云四号气象卫星成像特性及其应用前景. 海洋气象学报, 37 (2): 1–12. [DOI: 10.19513/j.cnki.issn2096-3599.2017.02.001] )
-
Lu F, Zhang X H and Xu J M. 2008. Image navigation for the FY2 geosynchronous meteorological satellite. Journal of Atmospheric and Oceanic Technology, 25 (7): 1149–1165. [DOI: 10.1175/2007JTECHA964.1]
-
Lu N M and Gu S Y. 2016. Review and prospect on the development of meteorological satellites. Journal of Remote Sensing, 20 (5): 832–841. [DOI: 10.11834/jrs320166194] ( 卢乃锰, 谷松岩. 2016. 气象卫星发展回顾与展望. 遥感学报, 20 (5): 832–841. [DOI: 10.11834/jrs320166194] )
-
Lyu W, Dai S L, Dong Y H, Shen Y L, Song X Z and Wang T S. 2017a. Attitude motion compensation for imager on Fengyun-4 geostationary meteorological satellite. Acta Astronautica, 138 : 290–294. [DOI: 10.1016/j.actaastro.2017.05.033]
-
Lyu W, Wang T S, Dong Y H and Shen Y L. 2017b. Imaging navigation and registration for geostationary imager. IEEE Geoscience and Remote Sensing Letters, 14 (12): 2175–2179. [DOI: 10.1109/LGRS.2017.2657578]
-
Schmit T J, Griffith P, Gunshor M M, Daniels J M, Goodman S J and Lebair W J. 2017. A closer look at the ABI on the GOES-R series. Bulletin of the American Meteorological Society, 98 (4): 681–698. [DOI: 10.1175/BAMS-D-15-00230.1]
-
Shang J, Liu C B, Yang L, Zhang Z Q and Wang J. 2017. Misalignment angle calculation accuracy analysis of three-axis stabilized geostationary satellite. Journal of Geoscience and Environment Protection, 5 (12): 153–165. [DOI: 10.4236/gep.2017.512011]
-
Shen Y L, Lv W, Yu Y J and Cheng W Q. 2014. Research of imager scan mirror’s thermal distortion model for image navigation and registration. Aerospace Shanghai, 31 (2): 26–29, 72. [DOI: 10.19328/j.cnki.1006-1630.2014.02.005] ( 沈毅力, 吕旺, 于永江, 程卫强. 2014. 用于图像定位与配准的扫描辐射计扫描镜热变形模型研究. 上海航天, 31 (2): 26–29, 72. [DOI: 10.19328/j.cnki.1006-1630.2014.02.005] )
-
Tang F, Dong H J, Li N and Liu C H. 2016. Geolocation errors and correction of FY-3B microwave radiation imager measurements. Journal of Remote Sensing, 20 (6): 1342–1351. [DOI: 10.11834/jrs.20165279] ( 唐飞, 董慧杰, 李南, 刘彩虹. 2016. FY-3B微波成像仪资料的地理定位误差与订正. 遥感学报, 20 (6): 1342–1351. [DOI: 10.11834/jrs.20165279] )
-
Tang S H, Qiu H and Ma G. 2016. Review on progress of the Fengyun meteorological satellite. Journal of Remote Sensing, 20 (5): 842–849. [DOI: 10.11834/jrs.20166232] ( 唐世浩, 邱红, 马刚. 2016. 风云气象卫星主要技术进展. 遥感学报, 20 (5): 842–849. [DOI: 10.11834/jrs.20166232] )
-
Tehranian S, Carr J L, Yang S, Madani H, Vasanth S, McKenzie K, Schmit T J, Swaroop A and DiRosario R. 2008. Remapping GOES imager instrument data for South American operations, implementing the XGOHI system//Proceedings of the 5th GOES User’s Conference. New Orleans: [s.n.]
-
Virgilio V N. 2015. Geolocation of remotely sensed pixels by introspective landmarking. U.S., No. 8, 942, 421 B1
-
Xu J M, Yang J, Zhang Z Q and Sun A L. 2010. Chinese meteorological satellitas, achievements and applications. Meteorological Monthly, 36 (7): 94–100. ( 许健民, 杨军, 张志清, 孙安来. 2010. 我国气象卫星的发展与应用. 气象, 36 (7): 94–100. )
-
Yang J, Zhang Z Q, Wei C Y, Lu F and Guo Q. 2017. Introducing the new generation of Chinese geostationary weather satellites, Fengyun-4. Bulletin of the American Meteorological Society, 98 (8): 1637–1658. [DOI: 10.1175/BAMS-D-16-0065.1]
-
Zhang R W. 1998. Satellite Orbit Attitude Dynamics and Control. Beijing: Beihang University Press: 7–17 (章仁为. 1998. 卫星轨道姿态动力学与控制. 北京: 北京航空航天大学出版社: 7–17)
-
Zhang Z Q, Dong Y H, Ding L, Wang G Q, Fang X, Zhang X X and Huang F X. 2016. China’s first second-generation FY-4 meteorological satellite launched. Aerospace China, (12): 6–12 (张志清, 董瑶海, 丁雷, 王淦泉, 方翔, 张效信, 黄富祥. 2016. 我国首颗第二代静止气象卫星风云-4升空. 国际太空, (12): 6–12)
-
Zhang Z Q, Lu F, Fang X, Tang S H, Zhang X H, Xu Y L, Han W, Nie S P, Shen Y B and Zhou Y Q. 2017. Application and development of FY-4 meteorological satellite. Aerospace Shanghai, 34 (4): 8–19. [DOI: 10.19328/j.cnki.1006-1630.2017.04.002] ( 张志清, 陆风, 方翔, 唐世浩, 张晓虎, 许映龙, 韩威, 聂肃平, 申彦波, 周毓荃. 2017. FY-4 卫星应用和发展. 上海航天, 34 (4): 8–19. [DOI: 10.19328/j.cnki.1006-1630.2017.04.002] )


