

|
收稿日期: 2017-09-05
基金项目: 国家国防科工局高分专项(民用部分)卫星应用共性关键技术项目(编号:32-Y20A22-9001-15/17);中国科学院重点资助项目(编号:KGFZD-125-13-006);国家大科学工程航空遥感系统资助项目;中国资源卫星应用中心资助项目
第一作者简介: 陈震霆,1979年生,男,博士研究生,研究方向为卫星偏振遥感、云偏振特性。E-mail:cztgis@qq.com
通信作者简介: 孙晓兵,1966年生,男,研究员,研究方向为大气偏振遥感、地物偏振特性。E-mail:xbsun@aiofm.ac.cn
中图分类号: TP701
文献标识码: A
|
摘要
在卫星海洋遥感中,云作为海气耦合系统最重要的调节器之一,其检测结果对海洋上空云微物理特性的反演精度有较大影响。因此,快速而准确识别海洋上空的云像元是卫星遥感数据处理过程中首要解决的关键问题。以PARASOL (Polarization and Anisotropy of Reflectances for Atmospheric Sciences coupled with Observations from a Lidar)卫星搭载的POLDER3载荷遥感数据为研究对象,提出一种改进的海洋上空云检测方法。首先剔除海洋耀光;接着利用有云与晴空区近红外反射率差异检验识别有云像元,并利用偏振反射率检验进一步识别低反射率的云像元;然后利用近红外与可见光反射率比值检验识别晴空像元;最后建立多角度云检测结果空间融合规则,重新标记有云、晴空和未定像元。以印度洋海区为例进行实验分析,将云检测结果与Buriez方法进行对比,发现检测精度基本相当,而有云像元的识别速度却平均提高约3倍。结果表明:该方法能有效的检测出海洋上空的云像元,满足业务化数据处理的高精度及时效性要求,为后续云微物理特性反演提供可靠的数据源。
关键词
云检测, POLDER3载荷, 偏振反射率, 多角度空间融合, 近红外
Abstract
Clouds are important regulators of the ocean–atmosphere coupling system in ocean satellite remote sensing. The results of cloud detection have a significant influence on the retrieval accuracy of cloud microphysical properties over the ocean. Therefore, achieving cloud detection over the ocean and determining methods to improve the processing speed of operational algorithm and the precision of cloud pixel recognition for polarized sensors are urgent concerns. This work proposes an Improved Cloud Detection (ICD) algorithm over the ocean according to operational cloud detection problems in satellite polarized sensor data. A series of continuous processes and tests is used to identify the clear-sky and pixel-by-pixel cloudy area using the data of Polarization and Directionality of Earth’s Reflectances (POLDER3). Such data are loaded by Polarization and Anisotropy of Reflectances for Atmospheric Sciences coupled with Observations from a LiDAR (PARASOL) satellite. The pixels are divided into ocean and land parts. Then, the ocean glint pixels are eliminated via the glint angle computing formula and the empirical threshold (see MODIS 40 degrees). Thereafter, the cloudy pixels are identified using the characteristic difference of near-infrared reflectance between cloud and clear-sky regions. Cloudy pixels with low reflectance are also further recognized using a polarized reflectance test according to the polarized sensitive characteristics of cloud particles. Next, the clear-sky pixels are identified by the reflectance ratio test between near- infrared and visible light. Finally, the spatial registration rule is created with multi-angle cloud detecting results, and all pixels are relabeled to cloudy, clear-sky, and undetermined pixels with this rule. The Indian Ocean is used as an example for experimental analysis. The results of improved cloud detection are compared with those of the Buriez method. The detection accuracy is very close to the Buriez algorithm but is more time-efficient. In the case of clear-sky pixels, the recognition rates of ICD and of the Buriez algorithm are approximately 30. For cloudy pixels, the recognition rate of ICD is approximately 47%. The error range of cloudy and undetermined pixels is approximately 1% compared with the Buriez algorithm. Furthermore, the efficiency of our cloud detection algorithm greatly improved. The data processing speed is improved approximately three times without considering the time consumption of external data acquisition. Results show that the algorithm is highly effective in achieving high-precision results of cloud detection. At the same time, the processing time of cloudy pixels is significantly reduced, and the operational speed of cloud-detecting products is considerably improved. This algorithm can provide real-time and accurate products for the inversion of atmosphere and ocean parameters to meet the high-precision and -efficiency requirements of operational processing in satellite ground systems. This algorithm is also dominant in the cloud detection process for Directional Polarimetric Camera (DPC) in the GF-5 satellite which is planned for launch in 2017.
Key words
cloud detection, POLDER3 sensor, polarized reflectance, multidirectional spatial fusion, near infrared
1 引 言
地球表面约2/3的区域被云层覆盖,作为海气耦合系统中最重要的调节器之一,云对地球辐射收支、水循环以及气候变化起着至关重要的作用(Rossow和Schiffer,1991)。在卫星海洋遥感中,光学载荷对地探测获取的遥感数据首先必须进行云检测,将观测数据分为有云像元和晴空像元,才能为云和气溶胶参数反演及海色特性研究提供有效的数据源。
随着卫星遥感技术的飞速发展,各种星载探测器在轨运行获取了大量的对地观测数据。针对这些遥感数据,学者提出了许多云检测方法。Rossow和Garder(1993)为国际卫星云气候计划(ISCCP)提出基于红外及可见辐射卫星测量数据的云检测算法,该算法利用五步连续阈值检验方法实现各类像元分类。Saunders和Kriebel(1988)利用先进甚高分辨率辐射仪(AVHRR)数据提出一种改进的晴空和有云像元检测方法。Bankert(1994)利用概率神经网络相关理论研究了AVHRR图像海洋区的云分类方法。Baum等人(1997)利用模糊逻辑方法实现了AVHRR全球数据的自动云检测。Ackerman(1996)利用美国国家海洋和大气管理局(NOAA)卫星观测数据研究了中红外通道晴空和有云区域的亮温差异,并利用一系列连续的云像元检验实现了中分辨率成像光谱仪(MODIS)载荷数据云像元的业务化处理(Ackerman 等,1998)。以上这些云检测方法能有效地识别出各种卫星遥感数据中的云像元,使得数据的有效利用率得到大幅提高。
偏振遥感作为近些年来倍受关注的一种新兴对地观测手段,其研究主要侧重于偏振遥感机理构建、定量遥感的偏振效应、大气偏振遥感以及偏振遥感器的研制等方面。研究表明,与传统光学遥感手段相比,云和气溶胶对偏振信息更加敏感,使得卫星偏振遥感在大气探测方面更有优势(顾行发 等,2015)。法国从1996年—2004年先后发射了3颗多角度偏振载荷POLDER(Polarization and Directionality of Earth’s Reflectances)用于全球对地观测研究(POLDER3已于2013年停止工作)。美国国家航空航天局为研究全球气溶胶特性研发了APS(Aerosol Polarimetry Sensor)载荷。由于目前没有业务运行的星载偏振探测器,使得现有卫星偏振遥感研究大部分基于POLDER系列载荷的历史数据开展工作。中国科学院安徽光学精密机械研究所研发星载多角度偏振探测仪(DPC),已于2018年上半年搭载高分五号卫星(GF-5)发射升空,将为全球尺度辐射收支、云、气溶胶、海色和地表偏振特性研究提供新的数据源和技术支撑。偏振载荷对地观测时,其数据必须经过一系列的处理才能为后续大气及地表特性反演提供合格数据,云检测是其核心步骤之一。由于偏振载荷在波段设置上不同于传统的光学载荷,因此其云检测算法通常需要结合偏振与非偏振信息考虑。Buriez等人(1997)根据POLDER载荷的特性,研究了业务化数据处理方法,并通过一系列连续的云检验实现有云和晴空像元的识别。Bréon和Colzy(1999)通过地面协同观测实现了POLDER载荷的云检测及验证。上述方法都能比较准确地识别地球表面覆盖的云层,但是陆地上空的云检测依赖于像元平均海拔高度和全球地表植被指数(GVI)数据合成库(Bouffiès和Bréon,1996),在海洋上空还需要从欧洲中期天气预报中心(ECMWF)获取海表风速风向等信息(Hagolle 等,2004),使得POLDER载荷的业务化处理特别是云检测的时效性不是很好。因此如何提高偏振载荷业务化算法的处理速度以及高精度云像元识别是实现海洋上空云检测的关键。
本文以法国小卫星PARASOL (Polarization and Anisotropy of Reflectances for Atmospheric Sciences coupled with Observations from a Lidar)搭载的POLDER3载荷1级数据产品为研究对象,提出一种改进的海洋上空云检测(ICD)方法,该方法通过一系列的阈值检验实现有云像元快速识别。
2 数据和方法
2.1 POLDER3数据
法国国家空间研究中心(CNES)研制的3颗POLDER载荷已经成功发射并获取了1996年—2013年对地观测数据,这些遥感数据被用于大气气溶胶、云、水汽和辐射收支研究。POLDER1和POLDER2在轨运行时间较短(分别为1996年11月—1997年6月,2003年4月—2003年10月),获取的数据量较小。PARASOL小卫星作为卫星列车A-Train中的重要组成部分,其搭载的POLDER3载荷从2004年12月一直持续运行到2013年12月,获取大量的观测数据。
POLDER3载荷是一个多偏振、多角度和多光谱成像辐射计,其3个主要组成部件为:电荷耦合元件(CCD)探测阵列,装有偏振片和滤光片的转轮,宽视场远心光学系统(Deschamps 等,1994)。CCD传感器阵列由284×364个独立感应器件构成。转轮的转动时间间隔为4.9 s,边缘开有16个圆孔槽,其中一个槽装有非透明滤光片用来检测暗像元,剩余的15个圆孔槽安装有6个非偏和9个偏振滤光片(1个偏振波段包括3个线偏振方向滤光片)。因此,POLDER3共有9个光谱测量波段(表1),其中3个波段是偏振的(490 nm,670 nm,865 nm),利用每个偏振波段3个方向线偏振测量值可以获取相应的斯托克斯矢量参量I、Q、U (Leroy 等,1997;Fougnie 等,2007)。
表 1 POLDER3波段特征
Table 1 Characteristics of the POLDER3 bands
| 波段 | 中心波长/nm | 波段宽度/nm | 是否偏振 | 主要任务 |
| 443 | 443.9 | 13.5 | 否 | 海色 |
| 490 | 491.5 | 16.5 | 是 | 海色/气溶胶/云 |
| 565 | 563.9 | 15.5 | 否 | 海色 |
| 670 | 669.9 | 15.0 | 是 | 地表/气溶胶/云 |
| 763 | 762.8 | 11.0 | 否 | 云氧压 |
| 765 | 762.5 | 38.0 | 否 | 云氧压 |
| 865 | 863.4 | 33.5 | 是 | 地表/气溶胶/云 |
| 910 | 906.9 | 21.0 | 否 | 水汽 |
| 1020 | 1019.4 | 17.0 | 否 | — |
POLDER3/PARASOL数据由位于法国图卢兹的CNES地面站接收,CNES将0级数据生成1级数据,处理过程包括数据校正、辐射定标、几何配准等(Hagolle 等,1999)。位于法国里尔第一大学的ICARE数据服务中心(www.icare.univ-lille1.fr)负责1级数据的管理以及2级、3级产品的生产。各级数据产品都可从ICARE网站获取,其标准产品由头文件和数据文件组成,头文件提供载荷和数据处理相关信息,数据文件包括经过辐射和几何处理的观测数据和辅助数据。由POLDER3载荷生成的1级产品以P3L1TBG1cccooov标识命名,ccc为卫星循环数,范围为[1,999],ooo为循环中轨道数,范围为[1,233],v为再处理批次(从A到Z),头文件和数据文件分别以L和D结尾进行标记(Bréon,2006)。为方便POLDER数据产品读取,ICARE提供POLDER和PARASOL数据可视化及分析工具Anapol(IDL图形界面)给用户使用,利用该工具可将标准格式数据文件转换为层次数据格式(HDF)。
2.2 云检测算法原理
大多数的云检测算法利用可见光反射率和亮温法识别云像元(Porcú和Levizzani,1992),而POLDER载荷的光谱范围为可见光至近红外波段,其云检测波段选择只能限定在此范围内,此外两个氧气A波段可以用来反演云顶压强、获取偏振波段辐射信息以及增强云检测精度(Parol 等,1999;Séze 等,1999)。
考虑晴空条件下,相对于陆地表面,海洋表面(非耀光区)反射率通常较低且受季节变化影响较小。为提高海洋上空偏振载荷(POLDER3)数据处理的速度,提出一种改进的云检测算法来实现海洋上空云像元的快速识别,以满足数据处理精度和时效性需求。该法利用一系列的连续处理及检测来逐像元识别有云和无云像元,算法流程如图1所示。


2.2.1 海陆像元划分
根据海洋表面非耀光区辐射信息随季节变化不大的特点,对POLDER3载荷数据进行海陆像元标识。首先通过全球海岸线矢量图构建全球海陆标识数据库,接着利用Anapol工具将POLDER3载荷1级标准格式产品数据转换为HDF格式,再读取HDF格式1级产品数据,提取产品中每个像元的经纬度信息,采用最邻近匹配方法查找海陆标识库中对应经纬度的海陆标识,如此不断循环直到所有像元都查找到相应的海陆标识并存储。将划分为陆地的像元利用Buriez等人(1997)的方法进行云检测,而所有海洋像元转入本算法进一步进行海洋耀光检测。
2.2.2 海洋耀光检测
太阳光入射海表特定区域因波浪菲涅尔反射形成海洋耀光,该区域的强辐射信息会干扰云像元的识别,必须将耀光像元剔除后才能进行云检测。海表受海风的影响变得粗糙不平,可将其视作不同倾斜斜率的微面元组成。太阳光入射倾斜微面元形成的耀光角Θglit计算公式为(Cox和Munk,1954)
| ${\varTheta _{{\rm{glit}}}}{\rm{ = co}}{{\rm{s}}^{ - 1}}{\rm{(cos}}{\theta _{\rm{s}}}{\rm{cos}}{\theta _{\rm{v}}} - {\rm{sin}}{\theta _{\rm{s}}}{\rm{sin}}{\theta _{\rm{v}}}{\rm{cos}}\phi )$ | (1) |
式中,θv为观测天顶角,θs为太阳天顶角,相对方位角
结合像元的几何信息(太阳几何、观测几何),利用式(1)逐像元计算对应的耀光角值,再参考MODIS海洋耀光检测40°耀光角经验值进行阈值判别(Remer 等,2005)。若待检测像元满足耀光角值Θglit小于40°,则该像元被标记为耀光像元,否则为非耀光像元。标记为耀光的像元不参与云检测,将其标记为未定像元,而标记为非耀光的像元则需进一步处理进行分类(有云、晴空、未定像元)。
2.2.3 反射率差异检验云像元
由海洋耀光检测划分的非耀光像元,其辐射信息除了海水贡献外,还应考虑大气分子、气溶胶和云等因素的影响。由于海表非耀光区晴空海表反射率相对较低,且近红外波段(865 nm)大气分子贡献几乎可以忽略(Goloub 等,1995),因此本文采用近红外波段反射率检验识别海洋上空非耀光区的云像元。对于非耀光区,有云像元和晴空像元反射率存在一定差异。非耀光区晴空海表的反射率偏低,而中厚云的反射明显强于前者,且历史晴空海表反射率
2.2.4 偏振反射率检验云像元
大气中的云一般由水滴或冰晶组成,根据相态(冰相或液相)不同可将其分为水云和冰云。水云的光散射采用洛伦茨—米散射理论进行计算,由几何光学相关理论可知球形粒子(液滴)在主虹方向(140°)偏振特征显著,并且近红外波段云偏振辐射信息几乎不受分子散射影响。在中低层云和薄云区域,由于反射率偏低,反射率差异方法检测效果不明显,而利用水云对近红外(865 nm)偏振辐射信息敏感的特性可用来增强检测低反射率的薄云和中低层云。因此当散射角限定在135°—150°内时,利用865 nm偏振反射率值明显大于其他角度的特性可以检测出非耀光区含有液滴的中低层云和薄云区,计算公式为
| $({u_{\rm{s}}} + {u_{\rm{v}}})P{R_{865}} > 2\text{%}$ | (2) |
式中,PR865表示865 nm偏振反射率,us和uv分别表示太阳天顶角和观测天顶角的余弦。
将满足式(2)的未定像元进一步划分为有云像元和未定像元,将未定像元转入下一阶段处理。
2.2.5 晴空像元识别
通过上述两个连续云检验可以识别海洋上空大部分的云像元。为降低未定像元比例,需从非耀光区的未定像元中进一步剥离出晴空像元。可以通过两个增强检验实现
(1) 反射率差异检验。将上一步未定像元的反射率与历史晴空像元反射率值进行比较,当两者的差值小于1%时将该像元标记为晴空像元。
(2) 近红外/可见光比值检验。在海洋上空,有云像元近红外波段反射率与可见光波段反射率比较接近,而晴空像元近红外波段反射率明显低于可见光。当未定像元的近红外波段反射率与可见光波段反射率的比值小于0.7时,将满足该条件的未定像元判别为晴空像元,其余像元保持不变。
2.2.6 多角度云检验结果空间融合
由以上一系列的数据处理和云检验过程可以实现POLDER3 1级产品的云检测。由于POLDER3对地进行多角度观测时,在不同观测角度下,海洋耀光检测和云检测结果存在一定差异。在一个观测角度下海表会形成海洋耀光,而在另一个观测角度则没有耀光产生。同样,在一个观测角度下待检测像元会被判别为晴空像元,而在另一个角度则可能识别为有云像元,多角度云检测结果的差异在云边界层特别明显,因此需要对不同角度的云检测结果进行空间融合。空间融合规则如下:
步骤1 根据实验海区所有多角度观测数据的空间信息(经纬度),逐像元获取相应的行列号信息,提取对应行列号的像元标识(有云、晴空、未定、无效);
步骤2 当所有角度像元都标为无效像元时,将该像元融合结果标为无效像元,当一个角度像元为有效像元时,执行步骤(2)—(4);
步骤3 当一个角度像元识别为有云像元时,则融合结果标记为有云像元;
步骤4 当一个角度像元标识为晴空像元时,则融合结果标记为晴空像元;
步骤5 将其他剩余像元融合结果标记为未定像元。
通过以上规则对多角度云检测结果进行重新标记,将融合后的结果以HDF格式进行存储。
3 结果与分析
3.1 实例分析
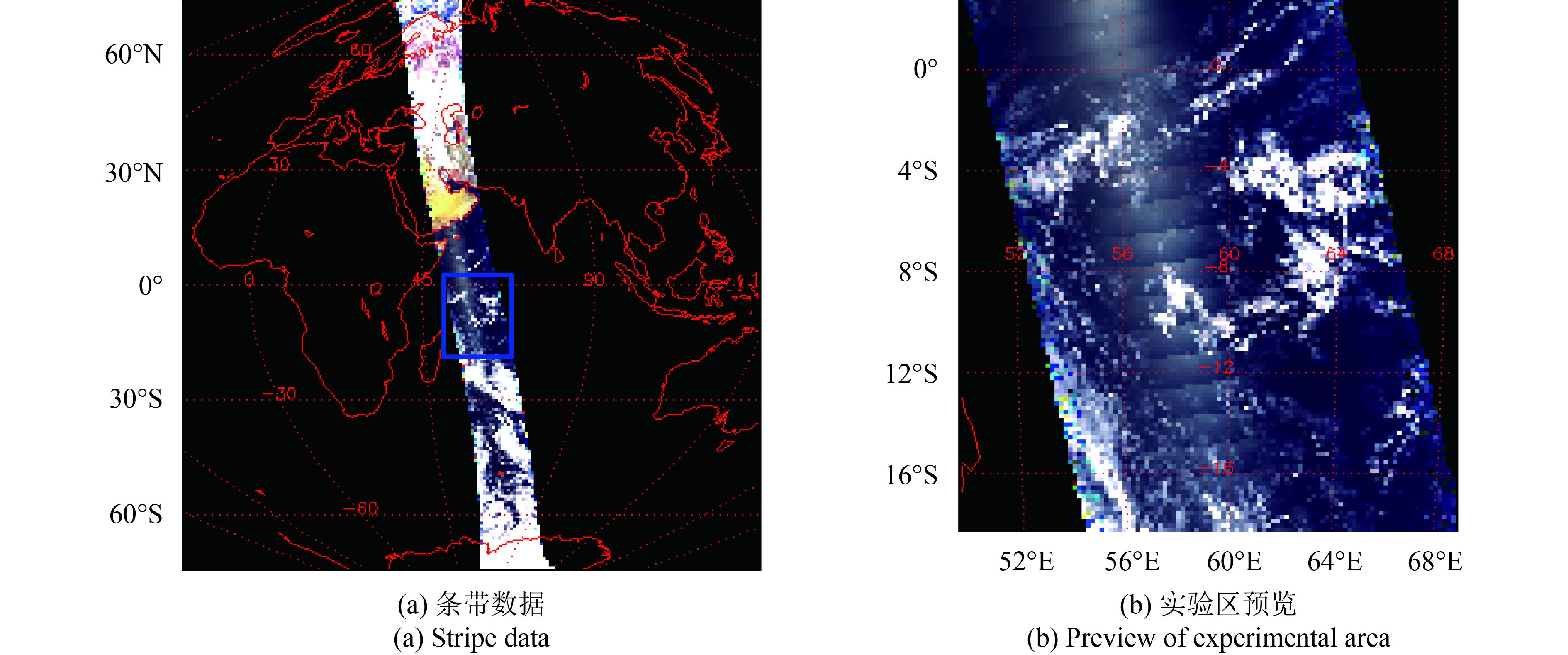
以西印度洋海区为研究对象,地理位置靠近赤道以南及非洲东海岸附近(图2(a)),选取图中蓝色方框所在海区进行云检测算法的实例分析,通过Anapol工具预览可知(图2(b)),该实验海洋区域研究内容丰富,选定海区既没有陆地像元,又存在海洋耀光像元和各种典型类型的云层(厚卷云、薄云、破碎云等)像元,因此将该海区用于算法检验更具有代表性。选取的研究数据源为单条带POLDER3 1级产品,观测时间为2005年03月04日,该条带观测数据以标准格式进行存储,对应名称分别为P3L1TBG1006137SD和P3L1TBG1006137SL,空间分辨率为6 km×7 km,投影方式为正弦投影。
将图2(b)实验海区标准格式数据文件存为HDF格式,利用C++编写算法代码(开发平台为Microsoft Visual Studio 2010),实现对所有观测数据的云检测。由于该实验区域总共有36次连续观测数据,其中对海面同一目标像元的多角度观测次数为14—15次,为便于统计将每次观测数据用层号表示(如Level 1表示第1次观测数据),利用编写的算法程序对36层数据进行云检测并输出结果,将相应的多角度云检测结果分别用伪彩色图显示(图3)。
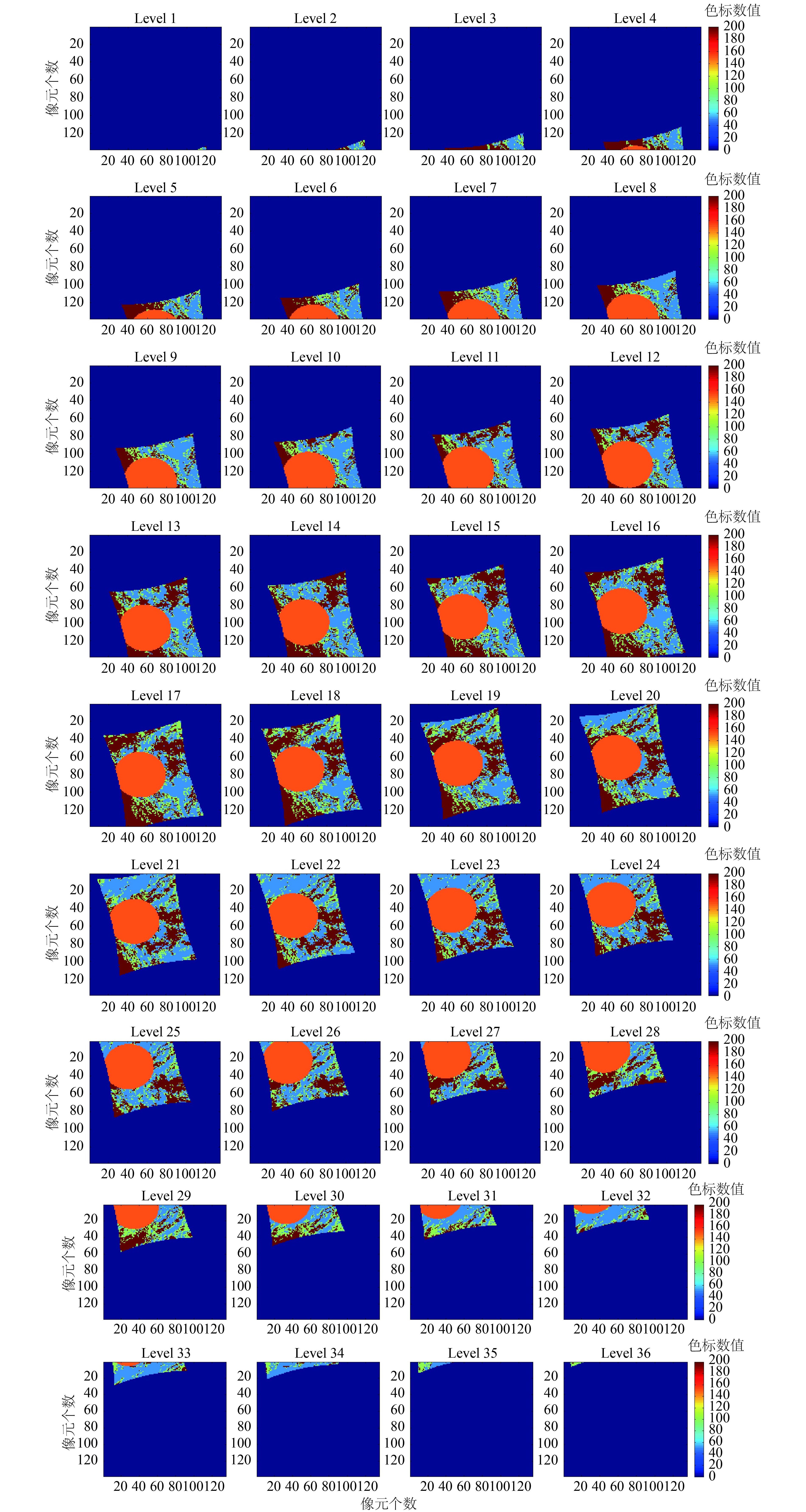
在海洋上空,随着PARASOL卫星的运动对海面同一目标区域进行多次成像观测,称之为多角度观测。该区域共有36次对地(海)观测成像,其对应观测数据也必须进行36次云检测。图3中的深红色(值为200)表示有云像元,橘红色(值为150)表示耀光像元,浅绿色(值为100)表示未定像元,淡蓝色(值为50)表示晴空像元,蓝色(值为0)表示无效数据(未观测)。从图3中可以看出,随着海面观测目标逐渐进入载荷镜头视场,观测的有效区域先逐渐增大,后随着目标逐渐移出视场而逐渐减小,其中Level 18和Level 19观测的有效区域最大,Level 1和Level 36观测的有效像元最少。从Level 4至Level 33,每层的云检测结果都受海洋耀光像元的干扰,从有效像元中剔除的耀光像元平均占到1/3(橘红色区域)。一个海面像元在一个观测角度能形成海洋耀光,在另一个观测角度则可能不会形成,因此利用多角度观测进行空间融合可以消除海洋耀光的影响。此外,从图3中的云检测结果可以看出,在某一观测角度下,一个像元可能被识别为有云像元,在另一个角度被识别为未定像元或晴空像元,故必须建立一定的多角度空间融合规则将不同的云检测结果进行统一。
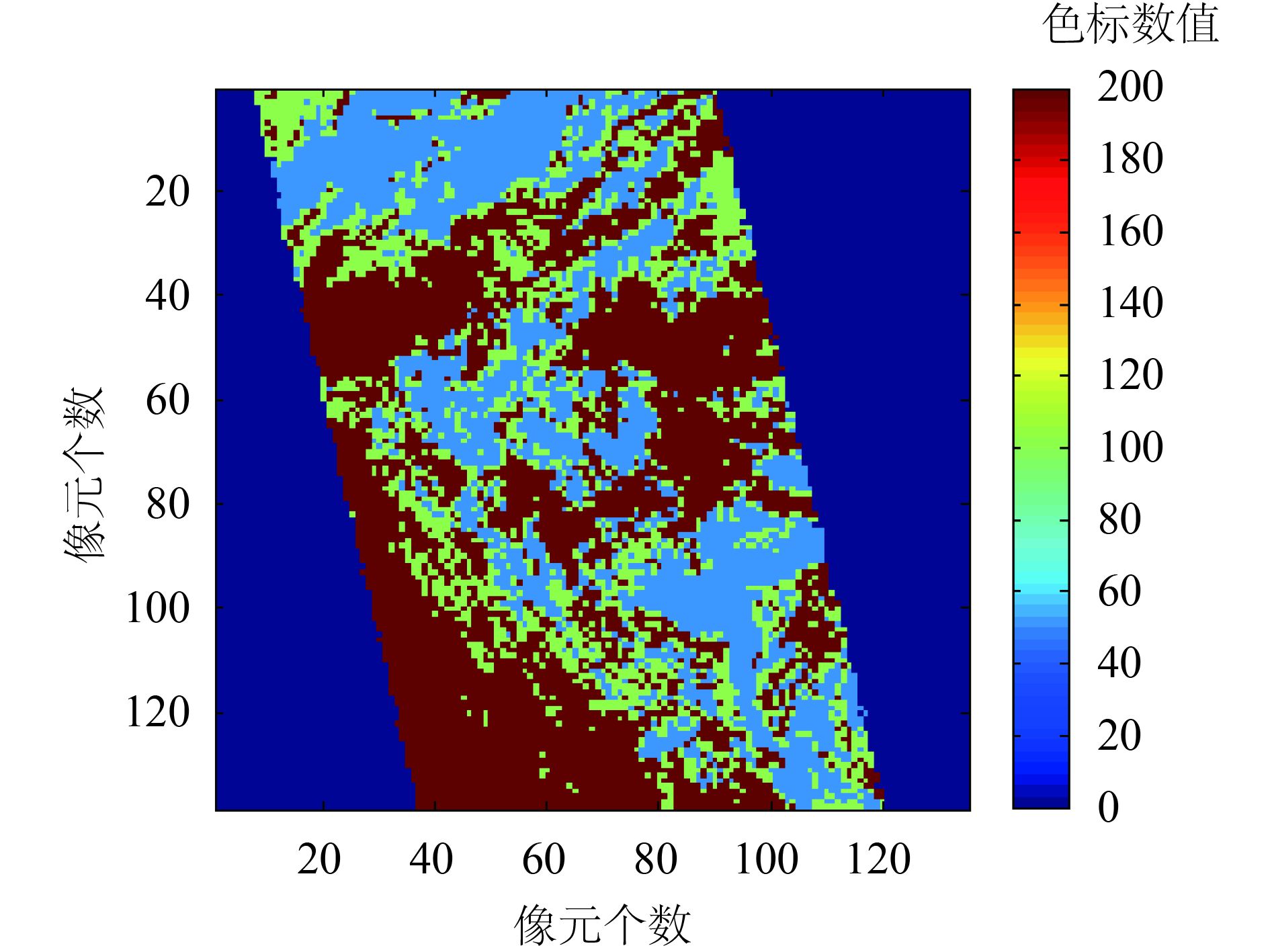
根据前面定义的多角度云检测空间融合的相关规则,将不同观测角度下的云检测结果进行统一,融合后的云检测结果用伪彩色图展现(图4)。从图4中可以看出,多角度云检测融合结果完全消除了耀光的影响,将图4与图2(b)预览进行对比,云检测效果明显,该方法能将中厚云完全检测出来(深红色区域),对薄云的检测效果也比较明显,对晴空像元(淡蓝色区域)的识别也比较准确。在云边界区域由于混合有超薄云、海雾、气溶胶等大气成分,使得该域的像元识别较为困难,将这些未能识别的像元统一标为未定像元(浅绿色区域)。
3.2 分析结果
在卫星海洋遥感中,不同于复杂的陆地地表,海洋上空大气层顶辐射强度和偏振信息受季节变化的影响较小,并且海洋耀光区的辐射信息主要来自水体贡献,与太阳及观测几何相关。因此,考虑海表辐射的特殊性,可对海洋上空的云检测方法进行一定的优化,使其既满足高精度的需求又能提高检测的速度。Buriez等人(1997)提出的云检测方法需要获取历史晴空反射率库和海表风速风向等外部数据,这些数据的获取和读取都需要一定的处理时间,基于偏振载荷(DPC)业务化处理高精度和时效的需求,优化依赖外部数据的海洋耀光检验和表观压强检验,有针对性地提出一种改进的海洋上空云检测(ICD)方法,并将两个方法检测结果进行对比分析(表2)。
表 2 ICD与Buriez云检测方法对比
Table 2 Comparison of ICD with Buriez
| 方法 | 外部数据 | 检测时间/s | 不同像元比重/% | ||
| 有云 | 晴空 | 未定 | |||
| Buriez | 海拔/晴空反射率/风速 | 15 | 48 | 30 | 22 |
| ICD | 无 | 5 | 47 | 30 | 23 |
从表2可以看出,Buriez云检测方法需要大量的外部数据(海拔、反射率、风速等),使得云检测处理时间相对较长,假定外部数据已经获取,利用Buriez方法进行云检测的时间大约为15 s,而利用改进的云检测方法进行云像元识别只需5 s,时效性大大提高,检测速度提高了约3倍。实际上,海表风速风向主要从ECMWF获取,需要等待发布相应产品数据后,偏振载荷(POLDER3)业务化处理流程才能执行,业务化处理时间需要计算外部数据下载和传输时间,导致总的云检测处理时间远大于15 s,时效性较低。本文提出的ICD方法不需要从外部获取数据,能对待检测像元进行实时处理,时效性大大提高,相比POLDER3业务化云检测方法,总的处理速度提高了约3倍。此外,在有云像元的识别精度上,Buriez方法检测到有云像元占有效像元的比重为48%,ICD方法为47%,未定像元的比例从22%上升为23%。从中可以看出,有云像元比重下降了1%,未定像元比重增加了1%,误差产生的原因是ICD方法不是通过海表风速来获取非耀光区的历史晴空反射率,而是将历史反射率优化为常量进行处理,使部分薄云和云层边界像元被标记为未定像元。对晴空像元而言,Buriez方法检测其比重为30%,ICD方法为30%。可知ICD方法对晴空像元的识别精度保持不变,而气溶胶反演精度主要取决于晴空像元识别精度,未定像元的增加并不会降低气溶胶反演精度。综上可知,改进的云检测方法精度与POLDER3业务化云检测方法精度基本相当。虽然改进的云检测方法在有云像元的识别精度上变化不大,但是云检测的时效性却大为提高,故本方法满足偏振载荷(DPC)业务化处理高精度及高时效性的要求,能实时为后续云和气溶胶特性反演提供满足精度需求的云检测产品。
4 结 论
本文针对卫星偏振遥感数据如何快速准确检测大气中的云这一关键问题提出新的解决方法,该改进方法通过一系列的数据处理和检验实现了海洋上空云像元快速而准确的识别。
传统的卫星偏振载荷(POLDER3)多角度对地观测成像数据处理时效性不高,导致云检测的业务化处理效率低,产品生产时间较长。本文针对海洋上空晴空像元反射率受季节变化影响小的特点,提出改进的云检测方法,该方法从提高偏振载荷业务化处理精度和速度的角度出发,将历史反射率数据库优化为相对应的常量,并减少对外部数据的依赖,对海洋耀光的识别进行优化处理(不考虑实时的风速风向)。通过对比发现,该改进的方法对海洋上空的有云像元的识别效果较好,检测精度变化不大,且云检测算法的时效性大大提高。不考虑外部数据获取的时间损耗的情况下,数据处理速度提高了约3倍。该方法不仅能实现不同类型像元的高精度检测,而且由于有无云像元处理时间大幅度缩减,大大提高了云检测产品的生产速度,能为大气、海洋及地表参数反演提供实时精准的数据产品,同样还能为中国正在研制的高分五号卫星多角度偏振载荷DPC云检测提供方法和技术支持。
志 谢 本文的研究数据和工具由法国ICARE数据服务中心提供,在此表示衷心的感谢!
参考文献(References)
-
Ackerman S A. 1996. Global satellite observations of negative brightness temperature differences between 11 and 6.7 μm. Journal of the Atmospheric Sciences, 53 (19): 2803–2812. [DOI: 10.1175/1520-0469(1996)053<2803:GSOONB>2.0.CO;2]
-
Ackerman S A, Strabala K I, Menzel W P, Frey R A, Moeller C C and Gumley L E. 1998. Discriminating clear sky from clouds with MODIS. Journal of Geophysical Research, 103 (D24): 32141–32157. [DOI: 10.1029/1998JD200032]
-
Bankert R L. 1994. Cloud classification of AVHRR imagery in maritime regions using a probabilistic neural network. Journal of Applied Meteorology, 33 (8): 909–918. [DOI: 10.1175/1520-0450(1994)033<0909:CCOAII>2.0.CO;2]
-
Baum B A, Tovinkere V, Titlow J and Welch R M. 1997. Automated cloud classification of global AVHRR data using a fuzzy logic approach. Journal of Applied Meteorology, 36 (11): 1519–1540. [DOI: 10.1175/1520-0450(1997)036<1519:ACCOGA>2.0.CO;2]
-
Bouffiès S and Bréon F M. 1996. A multi-year composite of GVI data as a clear reflectance database. International Journal of Remote Sensing, 17 (9): 1711–1726. [DOI: 10.1080/01431169608948734]
-
Bréon F M and Colzy S. 1999. Cloud detection from the spaceborne POLDER instrument and validation against surface synoptic observations. Journal of Applied Meteorology, 38 (6): 777–785. [DOI: 10.1175/1520-0450(1999)038<0777:CDFTSP>2.0.CO;2]
-
Bréon F M. 2006. PARASOL Level-1 Product Data Format and User Manual. Paris: CNES: 2–31
-
Buriez J C, Vanbauce C, Parol F, Goloub P, Herman M, Bonnel B, Fouquart Y, Couvert P and Seze G. 1997. Cloud detection and derivation of cloud properties from POLDER. International Journal of Remote Sensing, 18 (13): 2785–2813. [DOI: 10.1080/014311697217332]
-
Cox C and Munk W. 1954. Measurement of the roughness of the sea surface from photographs of the sun’s glitter. Journal of the Optical Society of America, 44 (11): 838–850. [DOI: 10.1364/JOSA.44.000838]
-
Deschamps P Y, Bréon F M, Leroy M, Podaire A, Bricaud A, Buriez J C and Sèze G. 1994. The POLDER mission: instrument characteristics and scientific objectives. IEEE Transactions on Geoscience and Remote Sensing, 32 (3): 598–615. [DOI: 10.1109/36.297978]
-
Fougnie B, Bracco G, Lafrance B, Ruffel C, Hagolle O and Tinel C. 2007. PARASOL in-flight calibration and performance. Applied Optics, 46 (22): 5435–5451. [DOI: 10.1364/AO.46.005435]
-
Goloub P, Herman M and Parol F. 1995. Polarization of clouds//Proceedings of SPIE 2582, Atmospheric Sensing and Modeling II. Paris, France: SPIE: 21–31 [DOI: 10.1117/12.228551]
-
Gu X F, Cheng T H, Li Z Q and Qiao Y L. 2015. Atmospheric Aerosol Polarized Remote Sensing. Beijing: Higher Education Press: 1–22 (顾行发, 程天海, 李正强, 乔延利. 2015. 大气气溶胶偏振遥感. 北京: 高等教育出版社: 1–22)
-
Hagolle O, Goloub P, Deschamps P Y, Cosnefroy H, Briottet X, Bailleul T, Nicolas J M, Parol F, Lafrance B and Herman M. 1999. Results of POLDER in-flight calibration. IEEE Transactions on Geoscience and Remote Sensing, 37 (3): 1550–1566. [DOI: 10.1109/36.763266]
-
Hagolle O, Nicolas J M, Fougnie B, Cabot F and Henry P. 2004. Absolute calibration of VEGETATION derived from an interband method based on the sun glint over ocean. IEEE Transactions on Geoscience and Remote Sensing, 42 (7): 1472–1481. [DOI: 10.1109/TGRS.2004.826805]
-
Leroy M, Deuzé J L, Bréon F M, Hautecoeur O, Herman M, Buriez J C, Tanré D, Bouffiès S, Chazette P and Roujean J L. 1997. Retrieval of atmospheric properties and surface bidirectional reflectances over land from POLDER/ADEOS. Journal of Geophysical Research, 102 (D14): 17023–17037. [DOI: 10.1029/96JD02662]
-
Parol F, Buriez J C, Vanbauce C, Couvert P, Seze G, Goloub P and Cheinet S. 1999. First results of the POLDER " Earth Radiation Budget and Clouds” operational algorithm. IEEE Transactions on Geoscience and Remote Sensing, 37 (3): 1597–1612. [DOI: 10.1109/36.763273]
-
Porcú F and Levizzani V. 1992. Cloud classification using METEOSAT VIS-IR imagery. International Journal of Remote Sensing, 13 (5): 893–909. [DOI: 10.1080/01431169208904162]
-
Remer L A, Kaufman Y J, Tanré D, Mattoo S, Chu D A, Martins J V, Li R R, Ichoku C, Levy R C, Kleidman R G, Eck T F, Vermote E and Holben B N. 2005. The MODIS aerosol algorithm, products, and validation. Journal of the Atmospheric Sciences, 62 (4): 947–973. [DOI: 10.1175/JAS3385.1]
-
Rossow W B and Schiffer R A. 1991. ISCCP cloud data products. Bulletin of the American Meteorological Society, 72 (1): 2–20. [DOI: 10.1175/1520-0477(1991)072<0002:ICDP>2.0.CO;2]
-
Rossow W B and Garder L C. 1993. Cloud detection using satellite measurements of infrared and visible radiances for ISCCP. Journal of Climate, 6 (12): 2341–2369. [DOI: 10.1175/1520-0442(1993)006<2341:CDUSMO>2.0.CO;2]
-
Saunders R W and Kriebel K T. 1988. An improved method for detecting clear sky and cloudy radiances from AVHRR data. International Journal of Remote Sensing, 9 (1): 123–150. [DOI: 10.1080/01431168808954841]
-
Séze G, Vanbauce C, Burie J C, Parol F and Couvert P. 1999. Cloud cover observed simultaneously from FOLDER and METEOSAT. Physics and Chemistry of the Earth, Part B: Hydrology, Oceans and Atmosphere, 24 (8): 921–926. [DOI: 10.1016/S1464-1909(99)00104-5]


