

|
收稿日期: 2017-08-24
基金项目: 国家自然科学基金(编号:41325004,41771397,51404272)
第一作者简介: 黄志华,1992年生,男,硕士研究生,研究方向为航天遥感图像的辐射定标和大气校正。E-mail:huangzh1110@126.com
通信作者简介: 张浩,1982年生,男,副研究员,研究方向为光学遥感图像辐射定量化。E-mail:zhanghao612@radi.ac.cn
中图分类号: TP701
文献标识码: A
|
摘要
高光谱遥感可以得到地物连续光谱信息,实现地物精细分类、目标高精度探测以及地物生化参量的定量化应用。传统的高光谱遥感器由于固定辐射动态范围,存在大量无效且冗余数据,给卫星载荷造成了巨大的存储压力。智能高光谱卫星关键技术之一在于利用前视相机预判辐射动态变化范围的方式辅助主相机成像模式调整,本文在智能遥感卫星系统概念的基础上,重点开展前视相机倾斜角设计、波段设置和辐射动态范围预测研究。研究表明:前视相机倾斜角需要综合考虑星上响应时间、单次成像距离和空间分辨率;考虑到云检测、气溶胶光学厚度和水汽含量反演等指标的实现,前视相机需要设置0.49 μm、0.66 μm、0.87 μm、0.94 μm、2.1 μm等5个波段;0.4—1.0 μm波段范围最大最小值辐亮度可以由有限波段进行预测。基于ENVI光谱库76条光谱数据,通过MODTRAN辐射传输模型模拟各类地物(植被、矿物、人造地物、土壤)在不同观测条件下的表观辐亮度,建立了在0.4—1.0 μm波段内各类地物辐射动态最大值和最小值模拟模型,利用光谱库中其他光谱数据验证了各类地物辐射动态最大值和最小值模拟模型,各类地物最大值和最小值预测模型验证的拟合优度(R2)分别大于98%和75%,模型验证相对误差分别小于5%和25%;同时利用Hyperion影像,验证了植被类预测模型,最大值模拟模型验证相对偏差在5%内,最小值模拟模型验证相对偏差在10%内。以上研究为智能高光谱卫星主相机的辐射动态范围调整提供了重要依据。
关键词
智能高光谱, 前视相机, 辐射传输模型, 表观辐亮度, 辐射动态范围
Abstract
In this study, the sensor bands of a fore-field sensor and the minimum and maximum radiometric range simulation models are discussed by focusing on a tilt angle. The radiation performance design of a fore-field sensor for an intelligent hyperspectral remote sensing satellite with a spectral range of 0.4—1.0 μm is examined. This study provides an important reference for the dynamic range adjustment of the main camera of the hyperspectral remote sensing satellite. The tilt angle of a fore-field sensor is affirmed by considering the processing time, imaging distance, and spatial resolution. The fore-field sensor bands are set by achieving cloud detection, aerosol optical thickness, and water vapor retrieval. The radiance of numerous objects is simulated using MODTRAN. The minimum and maximum radiometric range simulation models are built on the basis of the radiance of several bands with a spectral range of 0.4—1.0 μm. The tilt angle of a fore-field sensor with a width of 100 km is 11° given the response time of 2 s for the fore-viewing sensor processing and main sensor adjustment. The minimum five spectral bands are 0.49, 0.66, 0.87, 0.94, and 2.1 μm. These bands are carefully selected to identify clouds and estimate aerosol parameters and water vapor. The minimum and maximum radiometric range simulation models can be constructed using the radiance of several bands, with a spectral range of 0.4—1.4 μm. The maximum radiance of vegetation, mineral, soil, and man-made environment can be predicted using a radiance with wavelengths of 0.66 and 0.87; 0.49, 0.66, and 0.87; 0.49 and 0.66; and 0.49 μm, respectively. The minimum radiance of vegetation and mineral can be predicted using a radiance with a wavelength of 0.66 μm. The minimum radiance of soil and man-made environment can be predicted using a radiance with a wavelength of 0.49 μm. The verification correlation of the maximum radiometric range simulation model reaches 0.98, with an accuracy maintained at 0.05. The verification correlation of the minimum radiometric range simulation model reaches 0.75, with an accuracy maintained at 0.25. The fore-viewing angle allows the onboard device to have additional time in updating the radiometric dynamic range for the hyperspectral sensor to achieve the cloud detection and parameter retrieval methods. The fore-viewing sensor must obtain at least five spectral bands, namely, 0.49, 0.66, 0.87, 0.94, and 2.1 μm. In the spectral range of 0.4—1.4 μm, the radiance range of the vegetation, mineral, soil, and manmade environment can be predicted using the radiance with wavelengths of the few designed bands. An appropriate radiance range is important for the main camera to adjust its dynamic range by optimizing the gain values. As expected, additional detailed ground surface information can be recorded. In the future, an increasing number of ground objects and other spectral ranges must be investigated.
Key words
intelligent hyperspectral, fore-field sensor, radiation transfer model, apparent radiance, radiometric dynamic range
1 引 言
高光谱遥感是当今遥感技术发展的前沿,在大气环境污染气体、温室气体监测、生态环境的生物多样性、植被类型监测、土壤污染等方面具有广泛应用价值(张兵,2011)。国内高光谱卫星发展迅速,2008年发射的HJ-1A搭载了一台超光谱成像仪,具备幅宽50 km、空间分辨率为100 m、110—128个波段的特点,主要用于环境监测和减灾工作(曾群 等,2013);2016年年底发射的两颗Spark高光谱卫星,波段达到160,幅宽达到100 km;2018年5月成功发射GF-5。国外高光谱卫星技术也在迅猛发展,美国海军的NEMO卫星,主要用于海岸线环境快速分析,提取地表反射率、海面遥感反射率、水汽浑浊度等(崔钟旭,2000);美国面向21世纪为接替Landsat 7研制的高光谱EO-1卫星,波段数达到242(谭炳香 等,2005);德国发射的EnMap高光谱卫星可以观测全球农业与森林、陆地使用与地面变化、城市发展以及气候变化(高国龙,2011);日本计划于2019年发射的ALOS-3卫星,主要用于制图、区域观测、灾害监测以及资源测绘;NASA预计2020年发射的HyspIRI高光谱卫星,利用ER-2进行了相关的机载试验工作(岳桢干,2013)。
随着高光谱定量遥感技术的发展(童庆禧 等,2016),光谱分辨率越来越高,数据越来越大,对卫星载荷的要求越来越高(张路,2015),缓解载荷存储压力以及信息的可用性采集变得越来越重要(张琪 等,2012)。现有高光谱卫星发射后传感器载荷指标无法改变,在轨运行期间具有固定的观测成像模式(梁顺林,2009;张兵,2011),遥感器无法根据观测对象、观测任务和观测区域环境的不同对载荷参数指标做出适时优化和具体针对性的调整,数据的质量可能存在很大问题,在有厚云或者气溶胶光学厚度非常大的区域所获取的图像是无效的(王跃明 等,2013;张兵,2016),在实际应用中无法利用这些数据。
针对以上问题,张兵(2011)提出了智能高光谱卫星的概念,智能高光谱卫星成像系统包括前视预判相机和主相机,前视相机用于云监测、气溶胶光学厚度以及水汽含量的反演,以及成像区域地表覆盖与背景辐射信息的初步估算,为主相机成像提供重要依据;主相机以最优化模式对地表进行光谱成像。事实上,国际上前些年已经研制了一些具有智能特征的卫星,如欧空局PROBA卫星搭载的紧凑型高分辨率成像光谱仪,可以根据成像需求,实现针对陆地、水体、植被等不同需求的高光谱成像模式(盖利亚 等,2008);美国NEMO卫星的高光谱数据处理采用自适应光谱识别系统ORASIS,其数据处理采用凸面集分析和正交投影变换技术,对特定场景分解生成10—20个端元,实现自动数据分析、特征提取和数据压缩(崔钟旭,2000);BIRD卫星拥有在轨数据处理能力,包括辐射校正、几何校正以及灾害预警和监测专题信息生产等(Stelter 等,2000)。
综上所述,为缓解载荷存储压力,解决有厚云或者气溶胶光学厚度较大区域获取图像无效的问题,提高主相机的数据获取效率,本文基于智能高光谱遥感卫星的概念(张兵,2011),重点研究了前视相机的几何与光谱设置的核心问题,包括:
(1) 前视相机倾斜角的设计。实现前视相机和主相机有效协同工作。
(2) 前视相机波段设计。在设置最少的有限波段数的情况下,既能识别云、反演气溶胶光学厚度和水汽含量,又能实现最大最小值预测。
(3) 辐亮度最大值和最小值预测模型的建立。通过MODTRAN模拟ENVI波谱库中的不同地物种类的数据,分别建立不同地物种类的最大值和最小值预测模型,实现根据前视相机收集的波段信息预测可见光与近红外波段(0.4—1.0 μm)的辐射响应动态范围,为主相机成像模式提供重要参考。
2 数据与方法
2.1 前视相机观测角设计
智能高光谱传感器的工作模式如图1所示:Ⅰ为主相机处于关闭状态,前视相机对地表成像;Ⅱ为在一段时间t内,前视相机处理图像并反馈信息给主相机,主相机调整成像模式;Ⅲ为前视相机观测下一个区域,主相机开启,对之前前视相机预先观测的地表,按照调整后的模式进行成像;Ⅳ为主相机关闭,前视相机处理图像并反馈信息给主相机,主相机调整成像模式,如此循环下去。通过智能高光谱传感器的工作模式,可以看出前视相机倾斜角的设计需要实现3个目的:(1)提供给主相机最佳成像方式;(2)避免主相机和前视相机视场的交叉重叠;(3)给前视相机处理和主相机成像模式调整提供足够的时间。较大的倾斜角能够满足需求,但是会因为路径的的增加而降低空间分辨率。本文在单次推扫距离为30 km、60 km、100 km的情况下,计算前视相机最佳倾斜角。


根据以上描述,前视相机观测倾斜角计算为
| $\tan \theta = \frac{{w + \nu t}}{H}$ | (1) |
式中,θ表示前视相机倾斜角,v表示卫星的飞行速度(单位:km/s),t表示主相机的响应时间(单位:s),w表示单次推扫距离(单位:km),H表示卫星相对地表的高度(单位:km)。
2.2 前视相机波段设计
光学遥感数据中大量云的存在,影响了遥感图像的质量,从而降低了图像的数据利用率,在厚云的情况下,导致数据无效和冗余的情况,云检测在光学遥感图像处理过程至关重要(侯舒维 等,2014)。前视相机目的之一是提前监测卫星飞行前方区域是否被云层覆盖,如果没被云层覆盖,则主相机开启,采用最优化模式进行成像;如果检测到前方云层较多,那么关闭主相机,不进行影像的获取。为降低星上处理难度,采用归一化云指数CDI(Cloud Detection Index)方法实现云检测(张鑫,2016),表达公式为
| ${\rm{CDI}} = \frac{{\rho_{0.66} - \rho_{0.94}}}{{\rho_{0.66} + \rho_{0.94}}}$ | (2) |
式中,ρ0.66表示红波段0.66 μm的地表反射率,ρ0.94表示水汽吸收波段0.94 μm的地表反射率。云在可见光(红波段0.66 μm)具有高反射率,在0.94 μm受水汽影响特征为吸收谷,则CDI值大于0;土壤发射光谱在两个波段数值大致一样,CDI值接近于0;植被光谱在红波段为吸收谷,在0.94 μm处于高反射,CDI值小于0。当云层增厚时,对0.66 μm波段的反射率增加,对0.94 μm的反射率降低。当这两个波段的反照率都在0.5附近时,云层对遥感观测有着较大的影响,此时,归一化云指数为0。当归一化云指数大于0时,关闭主相机,归一化云指数小于0时,重新开启主相机。
前视相机进行气溶胶光学厚度反演将有效提高主相机数据获取效率,避免获取到被较大气溶胶光学厚度影响的无效影像,缓解卫星载荷的存储压力。对于气溶胶光学厚度反演,采用扩展的暗像元方法实现气溶胶光学厚度反演(陈良富 等,2011;孙林 等,2006),通过MODTRAN建立查找表,查找表建立需要针对大陆型气溶胶类型、沙尘型气溶胶类型和城镇型气溶胶类型分别建立。暗像元方法的核心思路是在暗像元选择基础上,利用短波红外波段(2.1 μm)、红色波段(0.66 μm)和蓝色波段(0.49 μm)的经验关系进行气溶胶光学厚度反演,公式为
| $\rho^*_{0.66} = 0.5 \rho^*_{2.1}$ | (3) |
| $\rho^*_{0.49} = 0.5 \rho^*_{0.66}$ | (4) |
式中,
对于水汽的反演,利用水汽吸收波段与邻近的非水汽吸收波段(0.87 μm)的辐亮度计算出水汽吸收波段的水汽透过率,公式为
| $T_{0.94}= \frac{L_{0.94}}{L_{0.87}}$ | (5) |
式中,T0.94表示0.94 μm水汽吸收波段的透过率,L0.94表示0.94 μm水汽吸收波段的辐亮度(单位:w/sr/m2/μm),L0.87表示0.87 μm波段的辐亮度(单位:w/sr/m2/μm)。然后利用CIBR算法实现水汽柱含量的反演(刘三超 等,2009)。
综上所述,为了识别云、反演气溶胶光学厚度以及水汽含量,前视相机设置的最少波段为5个,中心波长为0.49 μm、0.66 μm、0.87 μm、0.94 μm和2.1 μm。结合现今主流遥感器Sentinel-2A和Hyperion的中心波长和波段宽度,其中Sentinel-2A数据在气溶胶校正、云探测和水蒸气校正方面有广泛应用(龚燃,2015),见表1;Hyperion传感器是第一台星载高光谱图谱测量仪,共有242个波段,光谱分辨率10 nm(谭炳香 等,2005),见表2。在降低前视相机复杂程度的基础上,最大程度地发挥前视相机的作用,前视相机波段设置详情见表3。
表 1 Sentinel-2A波段列表
Table 1 Sentinel-2A bands list
| 类型 | 谱段号 | 中心波长/μm | 波段宽度/μm |
| 全色波段 | 1 | 0.443 | 0.02 |
| 蓝色波段 | 2 | 0.49 | 0.065 |
| 绿色波段 | 3 | 0.56 | 0.035 |
| 红色波段 | 4 | 0.665 | 0.03 |
| Vegetation red edge | 5 | 0.705 | 0.015 |
| 6 | 0.74 | 0.015 | |
| 7 | 0.783 | 0.02 | |
| NIR | 8 | 0.842 | 0.115 |
| Vegetation red edge | 8A | 0.865 | 0.02 |
| Water vapour | 9 | 0.945 | 0.02 |
| SWIR-Cirrus | 10 | 1.375 | 0.03 |
| SWIR | 11 | 1.61 | 0.09 |
| SWIR | 12 | 2.19 | 0.18 |
表 2 Hyperion波段列表
Table 2 Hyperion bands list
| 波段号 | 波段位置/nm | |
| VNIR通道 | 1—7 | 356—417 |
| 8—55 | 426—895 | |
| 56—57 | 913—926 | |
| 58—70 | 936—1058 | |
| SWIR通道 | 71—76 | 852—902 |
| 77—78 | 912—923 | |
| 79—224 | 933—2396 | |
| 225—242 | 2406—2578 |
表 3 前视相机波段设置
Table 3 Fore-field sensor bands setting
| 波段 | 中心波长/μm | 波段宽度/μm |
| 1 | 0.49 | 0.06 |
| 2 | 0.66 | 0.03 |
| 3 | 0.87 | 0.02 |
| 4 | 0.94 | 0.01 |
| 5 | 2.10 | 0.18 |
2.3 辐射动态变化范围模拟模型建立
基于以上波段设置,结合多种地物光谱构建一定光谱范围的最大值、最小值模型,为遥感器辐射动态范围调整提供支撑。地物光谱数据来自ENVI光谱库,包括植被、矿物、人造地物、土壤,涵盖了地球上主要地物类型。图2是ENVI波谱库中4种典型地物的反射率曲线,分别是矿物(gaylussi)、植被(saltbtus)、土壤(grayish brown loam)和人造地物(建筑混凝土,construction concrete)。

根据辐射传输理论,在一定条件下,利用MODTRAN进行表观辐亮度模拟。反射率为ρ的均匀Lambert地表对应的表观辐亮度计算公式为
| $\rho^*({\theta _{\rm{s}}}{\rm{,}}{\theta _{\rm{v}}},{\theta _{{\rm{v}} {\text{-}} {\rm{s}}}}{\rm{) = }}{\rho _{\rm{a}}}{\rm{(}}{\theta _{\rm{s}}}{\rm{,}}{\theta _{\rm{v}}},{\theta _{{\rm{v}} {\text{-}} {\rm{s}}}}{\rm{) + }}\frac{{{\rho _{\rm{t}}}}}{{1 - s*{\rho _{\rm{t}}}}}T({\theta _{\rm{s}}}) \cdot T({\theta _{\rm{v}}})$ | (6) |
| $L = \cos ({\theta _{\rm{s}}}){E_0}/{\text{π}}/{d^2}\rho *$ | (7) |
式中,ρ*是表观反射率;ρa是大气程辐射对应的反射率(内反射率,Atmosphere Intrinsic Reflectance),与地表辐射无关;ρt是地表反射率;s是大气半球反射率;T是太阳路径或观测路径总的透过率,θs、θv、θv-s分别是太阳天顶角、观测天顶角和相对方位角(单位:rad);L是大气层顶辐亮度(TOA)(单位:w/sr/m2/μm),E0是大气层顶的太阳辐照度(单位:w/sr/m2);d2是日地距离,单位为AU。
通过MODTRAN模拟不同地表反射率、水汽含量和气溶胶光学厚度的大气层顶表观辐亮度。一般地,可见近红外范围0.4—1.0 μm采用硅材料的探测器(谢超,2014),结合现有传感器(Hyperion、HJ-1A、GF-4等)在可见近红外的波段范围设计,基本在0.4—1.0 μm,因此此次重点研究的波段范围是0.4—1.0 μm,确定上面5个波段对应的辐亮度与可见近红外波段(0.4—1.0 μm)表观辐亮度最大最小值的线性关系,预测0.4—1.0 μm波段辐亮度变化范围,为主相机调整提供重要参考。进行模拟时,光谱分辨率设置为10 nm,设定的地表反射率、水汽含量和气溶胶光学厚度如下:
地表反射率:波谱库数据(植被(25条)、矿物(23条)、人造地物(18条)、土壤(10条));
气溶胶光学厚度(550 nm):0,0.25,0.75,1.5;
水汽含量(单位:g/cm2):0,0.75,1.5,2.5。
在大气模式下为中纬度夏季、垂直观测、成像日期为春分日、时间为GMT=3:00、观测区经纬度为经度116°、纬度40°的条件下进行表观辐亮度模拟。将MODTRAN模拟后的表观辐亮度进行高斯卷积计算,高斯卷积等效公式为
| $ri = \frac{{\displaystyle\int_{{\textit{λ}}_1}^{{\textit{λ}}_2} {si({\textit{λ}} )r({\textit{λ}}){\rm{d}}{\textit{λ}} } }}{{\displaystyle\int_{{\textit{λ}}_1}^{{\textit{λ}}_2} {si({\textit{λ}} ){\rm{d}}{\textit{λ}}} }}$ | (8) |
式中,ri是等效后的表观辐亮度,si(λ)是每个波段的高斯函数,r(λ)是表观辐亮度函数(单位:w/sr/m2/μm)。
如图3中veg_wx_uy是植被在不同水汽含量wx(0 g/cm2、0.75 g/cm2、1.5 g/cm2、2.5 g/cm2)和550 nm气溶胶光学厚度uy(0、0.25、0.75、1.5)组合条件下模拟的表观辐亮度。从图3中可以看出,气溶胶光学厚度对表观辐亮度有一定影响;在水汽吸收波段,水汽含量对表观辐亮度有较大影响,在其他波段基本没有影响,0.94 μm为水汽的吸收阶段,具有较强吸收,因此单独将其作为水汽特殊检测波段;2.1 μm的辐亮度数据与0.4—1.0 μm的辐亮度数据相比,相对较小,不予考虑。在以上分析的基础上,提取最大值和最小值以及相关波段(0.49 μm、0.66 μm、0.87 μm)表观辐亮度数据,提取最大值数据时,遍历0.4—1.0 μm波段的表观辐亮度曲线;在提取最小值数据时,要考虑大气中各种因素的影响,考虑了水汽吸收波段(0.94 μm)的强吸收影响,在0.4—1.0 μm波段,0.94 μm波段已经设置为水汽特殊吸收波段,选择跳过这个水汽波段再进行最小值的提取。

综上所述,进行各类地物最值模拟时,将0.49 μm、0.66 μm、0.87 μm与气溶胶光学厚度作为多元线性因变量,各类地物分别采用逐步法建立最值模拟模型,分析各类地物最值模型整体评估情况;最后利用各类地物的其他数据分别对各类地物的最值模型进行验证,回归模型验证数据具体包括植被、矿物、土壤、人造地物,分析它们的误差(相对误差均值ARD和拟合优度R2)情况。
采用夏季的Hyperion数据(http://glovis.usgs.gov/ [2017-08-15])(图4),成像时间为2016年9月2日,成像大小为80 km×7.5 km,成像区域中心经纬度为(30.85°N,120.625°E)。

对Hyperion影像进行预处理(杨玲莉 等,2015),得到在0.4—1.0 μm波段范围内的辐亮度图像,通过分类统计,提取相应波段的辐亮度信息,对植被类辐射动态预测模型进行验证分析。
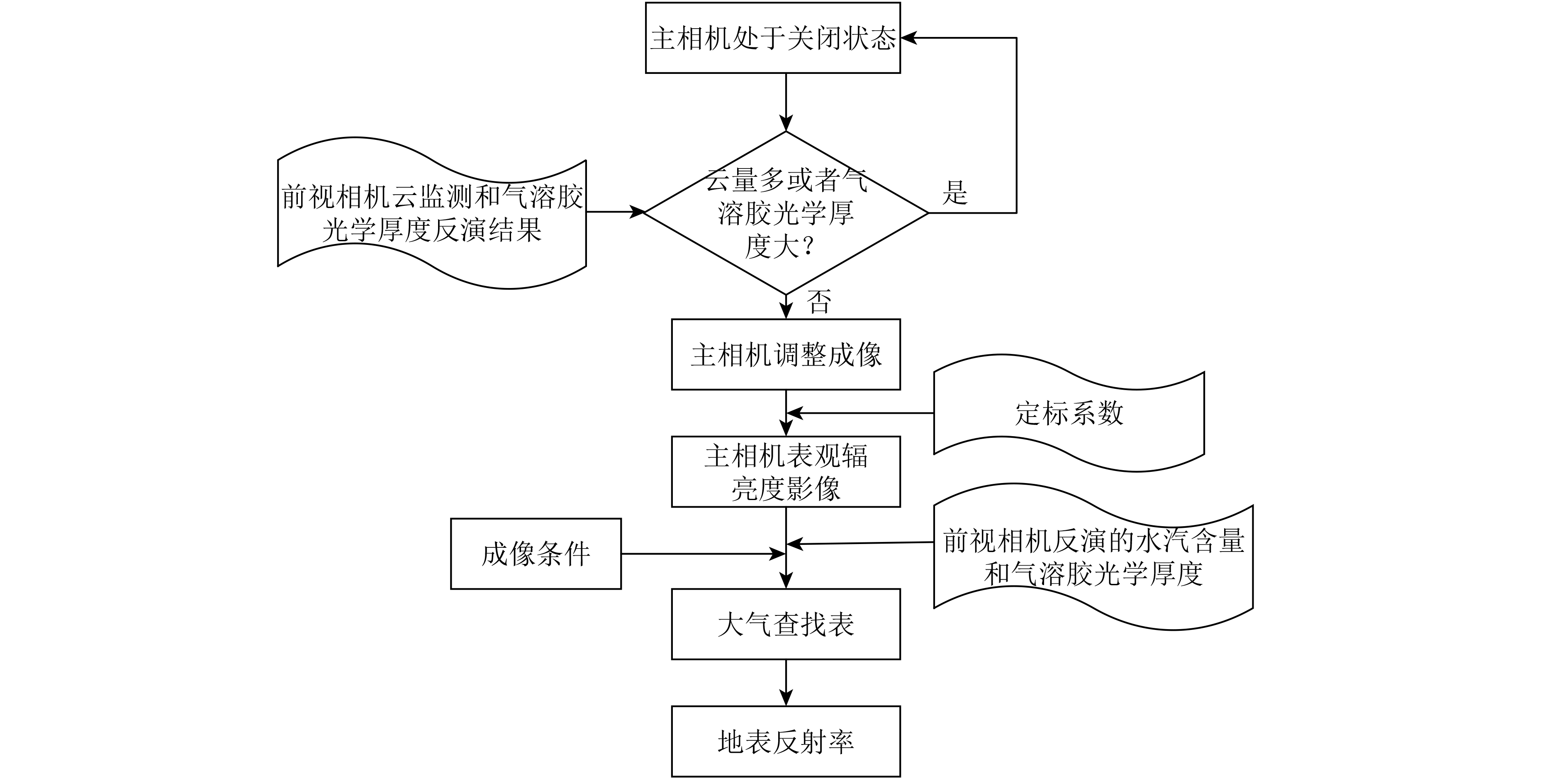
通过前视相机的数据采集以及实时处理,将参数结果提供给主相机,调整主相机最优化成像。主相机实时计算获得辐亮度数据,通过式(6)的逆运算结合大气查找表实时反演地表反射率,流程如图5所示,为数据的有效应用提供了基础。
3 结果与分析
高光谱卫星的发展,幅宽也会越来越大,在可见近红外(0.4—1.0 μm)波段,从EO-1的幅宽7.5 km(谭炳香 等,2005),到PROBA的幅宽13 km(盖利亚 等,2008),然后到ENmap的幅宽30 km(高国龙,2011),再到GF-5的幅宽60 km,最后到2020年准备发射的HyspIRI设计幅宽150 km(岳桢干,2013),这些都标志着幅宽会越来越大,因此本次研究的幅宽设定为100 km,尽可能包含这些高光谱传感器的设计幅宽。基于当今星上处理技术,利用FPGA平台,在算法较为复杂的情况下,处理的时间约为65 MB/s,星上相机开启和关闭调整需要的时间在毫秒级(Li 等,2017),文中3种指标实现的算法较简单,基于FPGA平台,若前视相机以16 bit记录数据,分辨率为50 m,推扫距离和幅宽为100 km的情况下,数据处理的时间约为0.59 s。为了保证给星上相关处理提供足够的时间,避免主相机和前视相机视场的交叉重叠,本文假定前视相机运算以及主相机系统响应时间为2 s,轨道高度600 km,卫星飞行的平均速度为7.42 km/s,利用式(1)计算单次推扫距离分别为30 km、60 km和100 km情况下的前视相机的倾斜角,结果如表4所示。
表 4 不同幅宽状态下前视相机的倾斜角
Table 4 The viewing angle of the fore-field camera in different push distance
| 推扫距离/km | 倾斜角/(°) |
| 30 | 3.32 |
| 60 | 7.11 |
| 100 | 10.83 |
结合表4,基于现今卫星传感器幅宽逐步增大的现状,保证星上处理具有足够时间的情况下,前视相机倾斜角为11°,在卫星轨道高度为600 km,利用ENVI波谱库中76条地表反射率数据,包括植被(25条)、矿物(23条)、人造地物(18条)、土壤(10条),运用MODTRAN模拟了不同条件下的表观辐亮度,运用高斯卷积进行了光滑处理。
提取多种条件下等效后的最大值波段、最小值波段表观辐亮度以及0.49 μm、0.66 μm和0.94 μm波段等效后的表观辐亮度数据。图6中是4种地物(植被、矿物、人造地物以及土壤)在不同条件下模拟的表观辐亮度曲线,mine_w0.75_ux表示矿物(albite2.spc Albite HS324.3B)在水汽含量0.75 g/cm2和550 nm气溶胶光学厚度为x情况下模拟的表观辐亮度;类似地,图6中soil、veg和made分别表示土壤(grayish brown loam)、植被(saltbtus)、人造地物(沥青混凝土,asphaltic concrete)在不同条件下模拟的表观辐亮度。

从图6的曲线中可以看出,植被类曲线的辐亮度最大值波段位置在0.78 μm附近,矿物类曲线的辐亮度最大值波段位置在0.48 μm附近,土壤类和人造地物类曲线的辐亮度最大值波段位置在0.45 μm附近;由于受到0.76 μm氧气吸收影响,矿物、土壤和人造地物类地物辐亮度最小值波段位置出现在0.76 μm附近,植被由于叶绿素在红波段具有强吸收的特性,辐亮度最小值波段位置在0.68 μm附近。利用各类数据采用逐步法分别建立各类地物辐亮度最大值和最小值模拟模型。模拟用到的数据:植被类(juniperbushIH91-4Bwhol、CDE18、Aspenleaf-aDW92-2等)数据32组,矿物类(cheatgra.spc Cheatgrass ANP92-11A mix、albite2.spc Albite HS324.3B、alunit.spc Ammonioalunite NMNH145596等)数据32组,土壤类(brown to dark brown gravelly loam、dark grayish brown silty loam等)数据16组,人造地物类(construction concrete、asphaltic concrete等)数据16组。各类地物模拟模型详情见表5。
表 5 各类地物最值模拟模型
Table 5 The simulation model of different types of object
| 地物种类 | 最大值模拟模型 | 最小值模拟模型 |
| 植被 | ymax=–0.619x2+1.163x3+12.280 | ymin=0.747x2+2.251 |
| 矿物 | ymax=1.231x1–0.932x2+1.079x3–25.374 | ymin=0.210x2+5.571 |
| 土壤 | ymax=1.157x1–0.184x2+10.250 | ymin=0.342x1–3.021 |
| 人造地物 | ymax=1.025x1+8.589 | ymin=0.237x1+0.325 |
| 注:ymax为0.4—1.4 μm波段范围内最大表观辐亮度(单位:w/sr/m2/μm);ymin为0.4—1.4 μm波段范围内最小表观辐亮度(单位:w/sr/m2/μm);x1表示波长为0.49 μm的表观辐亮度(单位:w/sr/m2/μm);x2表示波长为0.66 μm的表观辐亮度(单位:w/sr/m2/μm);x3表示波长为0.87 μm的表观辐亮度(单位:w/sr/m2/μm);x4表示550 nm气溶胶光学厚度。 | ||
从表5最大值和最小值模拟模型可以看出,在0.4—1.4 μm波段范围内,可以利用0.49 μm、0.66 μm和0.87 μm波段处的辐亮度信息实现各类地物辐亮度最大值预测;各类地物的最小值模拟模型可以利用单个波段的辐亮度来表征,植被在红波段特殊的强吸收作用,最小值可以利用0.66 μm的辐亮度模拟;使用波段0.66 μm的辐亮度可以模拟矿物辐亮度最小值,使用波段0.49 μm的辐亮度可以分别实现土壤和人造地物辐亮度最小值预测。各类地物的最值模拟模型整体评估见表6。
表 6 各类地物最值模拟模型整体评估表
Table 6 Overall assessment of the simulation model for each type of ground
| 地物类型 | 最大值模拟模型 | 最小值模拟模型 | |||||
| R2 | RSD/% | Sig | R2 | RSD/% | Sig | ||
| 植被 | 0.996 | 2.17 | <0.001 | 0.951 | 1.15 | <0.001 | |
| 矿物 | 0.996 | 3.84 | <0.001 | 0.946 | 2.31 | <0.001 | |
| 土壤 | 0.969 | 6.15 | <0.001 | 0.935 | 2.68 | <0.001 | |
| 人造地物 | 0.959 | 5.66 | <0.001 | 0.938 | 1.42 | <0.001 | |
从表6中可以看出,最大值模拟模型整体相关性强,显著性突出;植被和矿物最大值模拟模型整体相关性非常强,显著性突出,相关性在0.99以上,对于土壤和人造地物,相关性在0.95以上;植被、矿物、土壤和人造地物的相对标准差偏差(RSD)都小于7%。最小值模拟模型整体相关性较强,显著性突出;植被、矿物、土壤和人造地物模型整体相关性分别为0.951、0.946、0.935和0.938,各类地物最小值模拟模型的相对标准差偏差小于3%。
为了验证上述模型,使用光谱库中不同的地表反射率数据,利用MODTRAN模拟各类地物的辐亮度数据,具体地物种类包含植被(11条)、矿物(9条)、人造地物(8条)、土壤(5条)。分析最值模型与各类地物(植被、矿物、人造地物、土壤)的相关性,计算各类地物最值模型模拟的辐亮度与MODTRAN模拟的辐亮度差值,得到各类地物平均相对偏差(ARD)。最大值和最小值辐亮度模拟模型验证结果见表7。
表 7 最值模型验证统计表
Table 7 Verification of the maximum and minimum models
| 地物类别 | 最大值模拟模型 | 最小值模拟模型 | |||
| R2 | ARD/% | R2 | ARD/% | ||
| 植被 | 0.994 | 2.81 | 0.994 | 7.43 | |
| 矿物 | 0.997 | 4.80 | 0.954 | 13.66 | |
| 土壤 | 0.997 | 0.51 | 0.997 | 2.25 | |
| 人造地物 | 0.989 | 0.99 | 0.756 | 22.07 | |
从表7中可以看出,植被、矿物、土壤和人造地物的最大值模拟模型与各类地物的相关性在0.98以上,分别为0.994、0.997、0.997和0.989,相关性较高,各类地物最大值模拟模型的平均相对偏差(ARD)小于5%;除了人造地物外,植被、矿物、土壤的最小值模拟模型的相关性都在0.95以上,平均相对偏差小于15%;矿物平均相对偏差较大,为13.66%,矿物中存在一些金属元素,对光谱特性有一定影响;人造地物的相关性较差,相关系数R2=0.756,平均相对偏差为22.07%,主要是因为人造地物成分较复杂,导致模拟结果与实际结果相对偏差较大。
对Hyperion高光谱卫星数据进行处理分析,在0.4—1.0 μm范围内得到53个波段数据(原始数据在0.4—1.0 μm范围内有80个波段,经过处理后有53个波段)。对影像进行植被区分类处理,图7为植被区腌膜图像,统计了Hyperion相关波段信息,用建立的植被类预测模型进行预测,与图像真实统计值比较,得到它们的相对偏差,见表8。

从表8中可以看出,在0.4—1.0 μm波段范围内,前视相机植被类最大值预测模型相对偏差为3.40%,最小值预测模型相对偏差为9.38%,与波谱库中模拟的表观辐亮度验证的精度相比,相对误差有所增大,可能是真实情况中的不稳定性和统计的精度影响造成的,最大值模拟模型验证相对偏差基本在5%内,最小值模拟模型验证相对偏差在10%内,为最大值最小值预测模型的实用性提供了一定的参考。
表 8 Hyperion0.4—1.0 μm波段最大值和最小值模型验证统计表
Table 8 Verification of the maximum and minimum models of hyperion in 0.4—1.0 μm
| 最大值模型 | 最小值模型 | |
| 图像真实值 | 75.875 | 6.824 |
| 模型模拟值 | 73.296 | 7.531 |
| 相对偏差值 | 3.40% | 9.38% |
4 结 论
本文在智能高光谱遥感卫星概念的基础上,进行智能高光谱遥感卫星前视相机3个方面性能设计的探讨,提供相关参数实现主相机最佳模式成像,主要结论如下:
(1) 在前视相机处理和主相机调整的时间为2 s的情况下,100 km幅宽的前视相机的倾斜角为11°,可保证给星上处理提供足够时间、避免主相机和前视相机视场的交叉重叠,能够一定程度上满足现阶段高光谱传感器幅宽的观测需要。单次推扫距离越长,前视相机倾角越大。
(2) 前视相机设置5个波段(0.49 μm、0.66 μm、0.87 μm、0.94 μm、2.1 μm),既可保证实现云检测、气溶胶光学厚度反演和水汽含量反演,也可实现辐亮度最大值和最小值预测。
(3) 在0.4—1.0 μm波段范围内使用MODTRAN能够实现4类地物(植被、矿物、土壤和人造地物)表观辐亮度模拟,4类地物最大值、最小值预测模型不同,4类地物辐亮度最大值、最小值可以通过设计波段中的若干波段处的辐亮度进行预测,4种地物的验证结果是比较理想的。
本文受波谱库中地物类别和波长范围的限制,只考虑了智能高光谱遥感卫星前视相机0.4—1.0 μm波长范围内的性能设计探讨。因此在后续的研究中,需要进一步考虑智能高光谱遥感卫星前视相机1.0—2.5 μm波段范围,结合在实地测量的其他地物类型数据,进行更加深入、全面的研究。
参考文献(References)
-
Chen L F, Li S S, Tao J H and Wang Z T. 2011. Research and Application of Quantitative Retrieval for Aerosol. Beijing: Science Press (陈良富, 李莘莘, 陶金花, 王中挺. 2011. 气溶胶遥感定量反演研究与应用. 北京: 科学出版社)
-
Cui Z K. 2000. Ocean Earth Surveying and Observing (NEMO) satellite. OME Information, 17 (9): 22–29. ( 崔钟旭. 2000. 海洋地球测绘观测(NEMO)卫星. 光机电信息, 17 (9): 22–29. )
-
Gai L Y, Liu Z J and Zhang J X. 2008. Processing of CHRIS/PROBA hyperspectral data. Engineering of Surveying and Mapping, 17 (1): 40–43. ( 盖利亚, 刘正军, 张继贤. 2008. CHRIS/PROBA高光谱数据的预处理. 测绘工程, 17 (1): 40–43. )
-
Gao D L. 2011. Germany plans to launch advanced optical payload for earth observation in 2013 – EnMAP. Infrared, 32 (3): 47–48. ( 高国龙. 2011. 德国计划于2013年发射用于对地观测的先进光学有效载荷——EnMAP. 红外, 32 (3): 47–48. )
-
Gong R. 2015. Sentinel -2A satellite launched. Space International (8): 36–40. ( 龚燃. 2015. 哨兵-2A光学成像卫星发射升空. 国际太空 (8): 36–40. )
-
Hou S W, Sun W F and Zheng X S. 2014. Overview of cloud detection methods in remote sensing images. Space Electronic Technology, 11 (3): 68–76, 86. [DOI: 10.3969/j.issn.1674-7135.2014.03.014] ( 侯舒维, 孙文方, 郑小松. 2014. 遥感图像云检测方法综述. 空间电子技术, 11 (3): 68–76, 86. [DOI: 10.3969/j.issn.1674-7135.2014.03.014] )
-
Li C, Gao L R, Plaza A and Zhang B. 2017. FPGA implementation of a maximum simplex volume algorithm for endmember extraction from remotely sensed hyperspectral images. Journal of Real-Time Image Processing [DOI: 10.1007/s11554-017-0679-2]
-
Liang S L. 2009. Quantitative Remote Sensing of Land Surfaces. Beijing: Science Press (梁顺林. 2009. 定量遥感. 北京: 科学出版社)
-
Liu S C, Gao M F, Liu Q H, Fan Y D and Yang S Q. 2009. Retrieval of water vapor using hyperspectral data. Remote Sensing Information (3): 11–14, 37. ( 刘三超, 高懋芳, 柳钦火, 范一大, 杨思全. 2009. 高光谱数据反演大气水汽研究. 遥感信息 (3): 11–14, 37. )
-
Stelter C, Biering B, Heym B and Chen X J. 2000. Common cabin design for micro satellite BIRD for infrared earth observation. Control Engineering of China (3): 49–57. ( Stelter C, Biering B, Heym B, 陈小军. 2000. 红外地球观测用的微小卫星BIRD的公用舱设计. 控制工程 (3): 49–57. )
-
Sun J. 2006. Retrival of Aerosol Optical Depth by Hyperspectral Remote Sensing and its Environmental Impact. Shanghai: East China Normal University (孙娟. 2006. 气溶胶光学厚度的高光谱遥感反演及其环境效应. 上海: 华东师范大学)
-
Sun L. 2006. Remote sensing of aerosols over urban areas. Beijing: University of Chinese Academy of Science (孙林. 2006. 城市地区大气气溶胶遥感反演研究. 北京: 中国科学院研究生院(遥感应用研究所))
-
Sun L, Liu Q H, Liu Q and Chen L F. 2006. Aerosol optical thickness retrieving over bright surface: progress and prospect. Progress in Geography, 25 (3): 70–78. [DOI: 10.11820/dlkxjz.2006.03.009] ( 孙林, 柳钦火, 刘强, 陈良富. 2006. 高反射率地区气溶胶光学厚度遥感反演: 现状及展望. 地理科学进展, 25 (3): 70–78. [DOI: 10.11820/dlkxjz.2006.03.009] )
-
Tan B X, Li Z Y, Chen E X and Pang Y. 2005. Processing of EO-1 Hyperion hyperspectral data. Remote Sensing Information (6): 36–41. ( 谭炳香, 李增元, 陈尔学, 庞勇. 2005. EO-1 Hyperion高光谱数据的预处理. 遥感信息 (6): 36–41. )
-
Tong Q X, Zhang B and Zhang L F. 2016. Current progress of hyperspectral remote sensing in China. Journal of Remote Sensing, 20 (5): 689–707. [DOI: 10.11834/jrs.20166264] ( 童庆禧, 张兵, 张立福. 2016. 中国高光谱遥感的前沿进展. 遥感学报, 20 (5): 689–707. [DOI: 10.11834/jrs.20166264] )
-
Wang Y M, Lang J W and Wang J Y. 2013. Status and prospect of space-borne hyperspectral imaging technology. Laser & Optoelectronics Progress, 50 (1): 010008 [DOI: 10.3788/LOP50.010008] ( 王跃明, 郎均慰, 王建宇. 2013. 航天高光谱成像技术研究现状及展望. 激光与光电子学进展, 50 (1): 010008 [DOI: 10.3788/LOP50.010008] )
-
Xie C. 2014. Construction and optoelectronic properties of graphene and silicon nanostructures. Hefei: Hefei University of Technology (谢超. 2014. 基于石墨烯与硅纳米结构高性能光伏器件的构造与光电性能研究. 合肥: 合肥工业大学)
-
Yang L L, Zhang T B, He J H, Yue Y Z and Zhang Y C. 2015. Research on the Hyperion data pre-processing method based on ENVI. Journal of Henan Science and Technology (9): 39–42. ( 杨玲莉, 张廷斌, 何菊红, 悦永峥, 张雨晨. 2015. 基于ENVI的Hyperion数据预处理方法. 河南科技 (9): 39–42. )
-
Yue Z G. 2013. NASA conducts pre-airborne tests on HyspIRI satellite missions. Infrared, 34 (12): 13 ( 岳桢干. 2013. 美国航空航天局开展HyspIRI卫星任务的前期机载试验. 红外, 34 (12): 13 )
-
Zeng Q, Zhao Y, Tian L Q and Chen X L. 2013. Evaluation on the atmospheric correction methods for water color remote sensing by using HJ-1A/1B CCD image-taking Poyang Lake in China as a case. Spectroscopy and Spectral Analysis, 33 (5): 1320–1326. [DOI: 10.3964/j.issn.1000-0593(2013)05-1320-07] ( 曾群, 赵越, 田礼乔, 陈晓玲. 2013. HJ-1A/1B卫星CCD影像水环境遥感大气校正方法评价研究——以鄱阳湖为例. 光谱学与光谱分析, 33 (5): 1320–1326. [DOI: 10.3964/j.issn.1000-0593(2013)05-1320-07] )
-
Zhang B. 2011. Intelligent remote sensing satellite system. Journal of Remote Sensing, 15 (3): 415–431. [DOI: 10.11834/jrs.20110354] ( 张兵. 2011. 智能遥感卫星系统. 遥感学报, 15 (3): 415–431. [DOI: 10.11834/jrs.20110354] )
-
Zhang B. 2016. Advancement of hyperspectral image processing and information extraction. Journal of Remote Sensing, 20 (5): 1062–1090. [DOI: 10.11834/jrs.20166179] ( 张兵. 2016. 高光谱图像处理与信息提取前沿. 遥感学报, 20 (5): 1062–1090. [DOI: 10.11834/jrs.20166179] )
-
Zhang L. 2015. High spectral band selection and application inquiry for the observation of the multi-mode. Xi`an: Xi`an University of Science and Technology (张路. 2015. 基于多模式观测的高光谱波段选择及其应用探究. 西安: 西安科技大学)
-
Zhang Q, Tang Y L and Qiao Y K. 2012. Progress, application and development of earth observation technology. National Security Geophysics Series(八)——Remote Sensing Geophysics and National Security. Beijing (张琪, 唐媛莉, 乔玉坤. 2012. 对地观测技术的进展、应用与发展趋势//国家安全地球物理丛书(八)——遥感地球物理与国家安全. 北京)
-
Zhang X. 2016. The study on cloud detection and atmospheric correction with new type satellite data. Nanjing: Nanjing University of Information Science & Technology (张鑫. 2016. 新型星载观测数据的云检测与大气校正研究. 南京: 南京信息工程大学)


