

|
收稿日期: 2016-12-26; 优先数字出版日期: 2018-01-01
基金项目: 国家重点研发计划(编号:2016YFC0402403,2016YFC0402409);国家自然科学基金(编号:U1603241)
第一作者简介: 张纯斌(1990— ),男,硕士研究生,研究方向为低空遥感与水文水资源。E-mail:zhangchunbin1102@163.com
通讯作者简介: 杨胜天(1965— ),男,教授,研究方向为遥感与水文水资源。E-mail:yangshengtian@bnu.edu.cn
中图分类号: P23
文献标识码: A
|
摘要
低空遥感是近几年快速发展、应用非常广泛的新兴技术。小型消费级无人机集成可见光传感器,具有快速、灵活、高性价比等优势,受到广泛关注。然而目前有关该类无人机综合测量精度的研究不足,影响其进一步的推广应用。为此,本文开展了针对大疆(Phantom 3 professional)小型消费级无人机地形测量数据精度验证工作,设定6种航高(50 m、60 m、70 m、80 m、90 m和100 m)获取研究区的立体像对,生成影像点云(point cloud)、数字表面模型(DSM)以及数字正射影像图(DOM)等结果。在测量精度验证中,首先,在标准实验场均匀布设地面控制点(GCP),利用差分GPS测出GCP的高精度3维坐标;然后,通过GCP对立体像对进行绝对定位;最后,利用误差统计方法分析上述结果的测量精度。验证表明,在50—100 m航高时,无人机影像结果的分辨率为2.22—4.23 cm,水平方向平均误差为±0.51 cm,垂直方向平均误差为±4.39 cm,相对均方根误差(RMSE)水平方向为±2.79 cm,垂直方向为±9.98 cm。研究结果表明,小型消费级无人机在飞控系统下的测量精度可达厘米级,这不仅为野外地理和生态调查工作者提供一种低成本、快速、灵活与精确获取地形信息的新型测量手段,同时还对使用此类无人机做航测应用及飞行参数设置提供一定参考。
关键词
小型消费级无人机(UAV), 精度验证, 地形测量, 差分GPS, 地面控制点(GCP)
Abstract
Low-altitude remote sensing recently became a hot technology with rapid development and com-prehensive application. Small consumer UAV attracted wide attention with rapid, flexible, and cost-effective ad-vantages. Large professional UAV, which is vulnerable to weather conditions, requires professional manipulation and airspace application. These factors restrict its ability to access terrain data agilely and rapidly. A small consumer UAV can compensate for large professional UAV limitations. This study comprehensively verifies the accuracy of the data obtained through this type of UAV to improve application reliability. This study focuses on the precision verification of topographic data obtained by small consumer UAV (Phantom 3 Professional). Six kinds of flight heights (50 m, 60 m, 70 m, 80 m, 90 m, and 100 m) are set to acquire a stereoscopic image and generate Point Cloud, Digital Surface Model, and Digital Orthophoto Map. Ground Control Points (GCPs) are laid out uniformly in the standard experimental field to verify measurement accuracy, and their three-dimensional coordinates are derived using differential GPS with high-precision. The absolute position of the stereoscopic images is calibrated by GCPs. Finally, the measurement accuracy of the result is analyzed using the mean error and relative root mean square error (RMSE). Results show that the resolution of the UAV image is 2.22—4.23 cm for flight height 50–100 m and will decrease with increasing flight altitude. The mean error is ± 0.51 cm in the horizontal direction and ± 4.39 cm in the vertical direction. RMSE is ± 2.79 cm in the horizontal direction and ± 9.98 cm in the vertical direction. The errors in horizontal and vertical directions are within normal distribution, but the error range is larger in the vertical direction. Five or more images in the same area are recommended when shooting to avoid errors caused by insufficient image overlap and to generate high-quality data. Simultaneously, GCPs should be evenly laid in the survey area to ensure absolute positioning accuracy and should be found in more than five images. Experimental precision can be influenced by a number of factors, such as light and weather con-ditions and flight stability. The GCP selection, measurement method, and image spike processes include some errors. The research shows that the measurement accuracy of small consumer UAV can reach centimeter level with reliable flight control system condition; this condition provides a new measurement method for low-cost, fast, flexible, and accurate terrain information acquisition to geography and ecology researchers.
Key words
small consumer UAV, accuracy verification, topographic survey, differential GPS, GCP (Ground Control Points)
1 引 言
无人机(UAV)遥感是近几年新兴发展起来的低空测量技术,应用领域已从军事扩展到商用、民用市场(李德仁和李明,2014)。与传统卫星及航空遥感相比,无人机获取数据具有灵活、便捷及成本低、分辨率高等优势(Watts 等,2012;陈仲新 等,2016),已成为主要的低空遥感平台(李德仁,2016)。近些年,无人机已在生物与环境监测(Messinger 等,2016;Hodgson 等,2016;Zahawi 等,2015)、海岸与冰川监视(Bhardwaj 等,2016;Kraaijenbrink 等,2016)、植被信息提取(刘雪峰 等,2015)、灾害应急(李德仁 等,2008;周洁萍 等,2008)等领域,发挥着不可取代的作用。无人机独特的优势以及应用领域的扩展,已成为研究的热点课题。
地形数据是研究下垫面变化的关键信息,对野外地理生态调查与地形地貌的研究工作具有重要的作用(Vivoni 等,2014;Jordan,2015;Clapuyt 等,2016)。在野外地形测量中,无人机能构建陡峭地形的3维模型来监测土壤位移(Pierzchała 等,2014;Clapuyt 等,2016),搭载激光雷达获取坡面数据来研究土壤侵蚀的过程(Neugirg 等,2016),获取高分辨率影像来探索极地冰川季节性融化的过程(Kraaijenbrink 等,2016;Turner 等,2014a),检测露天矿的地形动态变化(Lee和Choi,2015;Cho 等,2015)、分析地质地貌成因的研究(Jordan,2015)等。因此,利用无人机快速获取地形数据,对野外工作者具有很强的实用性。
目前,无人机按应用领域分为大型专业级和小型消费级。研究表明大型专业无人机及机载雷达的测量精度已能达到厘米级(Anderson和Gaston,2013;Zarco-Tejada 等,2014;Neugirg 等,2016),但此类无人机需要专业操控手及申请飞行空域,同时还易受天气状况影响,因此限制了其快速、灵活的获取地形数据(Anderson和Gaston,2013;徐冠华 等,2016)。相对而言,小型消费级无人机具有易上手、低成本、高效率及飞行灵活等优势(Xiang和Tian,2011;Neitzel和Klonowski,2011;Harder 等,2016)。然而,当前针对该类无人机获取的数据精度研究不足,亟待进行综合性的验证,提高数据应用的可靠性。为此,本文选择标准实验区,开展4个方面的研究:(1)应用小型消费级无人机获取地形数据;(2)架设差分GPS获取GCP的高精度3维坐标;(3)通过GCP对立体像对进行绝对定位;(4)结合平均误差(mean)及相对均方根误差(RMSE)两个指标,对数据进行精度验证与评价。
2 研究区与数据
2.1 研究区
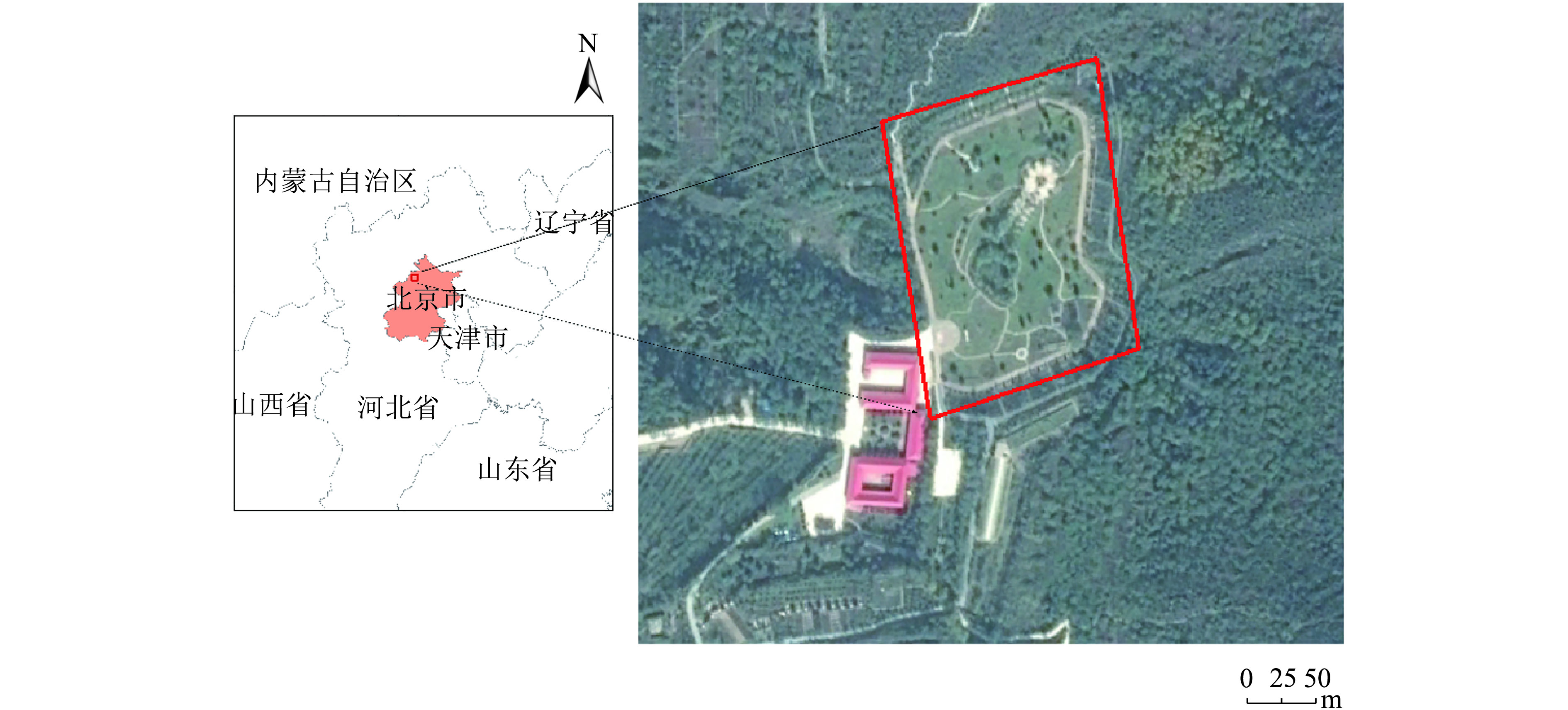
研究选取北京市延庆县水土保持园标准实验场(图1)开展精度验证实验,其经度为116°4′8.62″E,纬度为40°26′45.18″N。此处属于山区,地形起伏变化较大,海拔在582—594 m,植被覆盖度范围85%—90%,区域测量范围200 m×140 m,面积为28000 m2。研究区视野广阔,卫星信号不受干扰,人类活动少,有利于无人机的飞行实验。

2.2 影像数据
由于无人机受传感器视场角限制,获取大范围的地形数据时,需要飞行多条航线,同时因动力时间局限,还需进行多架次飞行,为此在数据获取中必须多航线、多架次以保证影像数据的重叠度(Dandois 等,2015)。重叠度是指沿同一航线(或邻近航线)的相邻像片上含有相同地物影像部分的比例,分为航向重叠度和旁向重叠度。航空摄影国标规范中明确立体像对的航向重叠一般为60%—65%,相邻航线的旁向重叠一般为30%—35%。为进一步减少无人机GPS精度和相机平台不稳定性造成的误差,该研究中航向和旁向重叠度均定为90%。
表 1 飞行参数
Table 1 The flight parameters
| 航高/m | 影像数量 | 飞行架次 | 航线数量 | 重叠度/% |
| 50 | 264 | 2 | 12 | 90 |
| 60 | 208 | 2 | 9 | 90 |
| 70 | 166 | 2 | 8 | 90 |
| 80 | 119 | 2 | 7 | 90 |
| 90 | 96 | 1 | 6 | 90 |
| 100 | 95 | 1 | 6 | 90 |
实验利用智能飞行控制软件设置不同的航高、重叠度以及航线数,来获取野外实验数据。影像数据获取时间为2016年5月24日,天气晴朗,风力2—3级。具体飞行参数如表1。其中,6种航高分别设置为50 m、60 m、70 m、80 m、90 m和100 m,总共有948张影像,飞行架次总计10次,航线数总计48条。
2.3 地面控制点数据
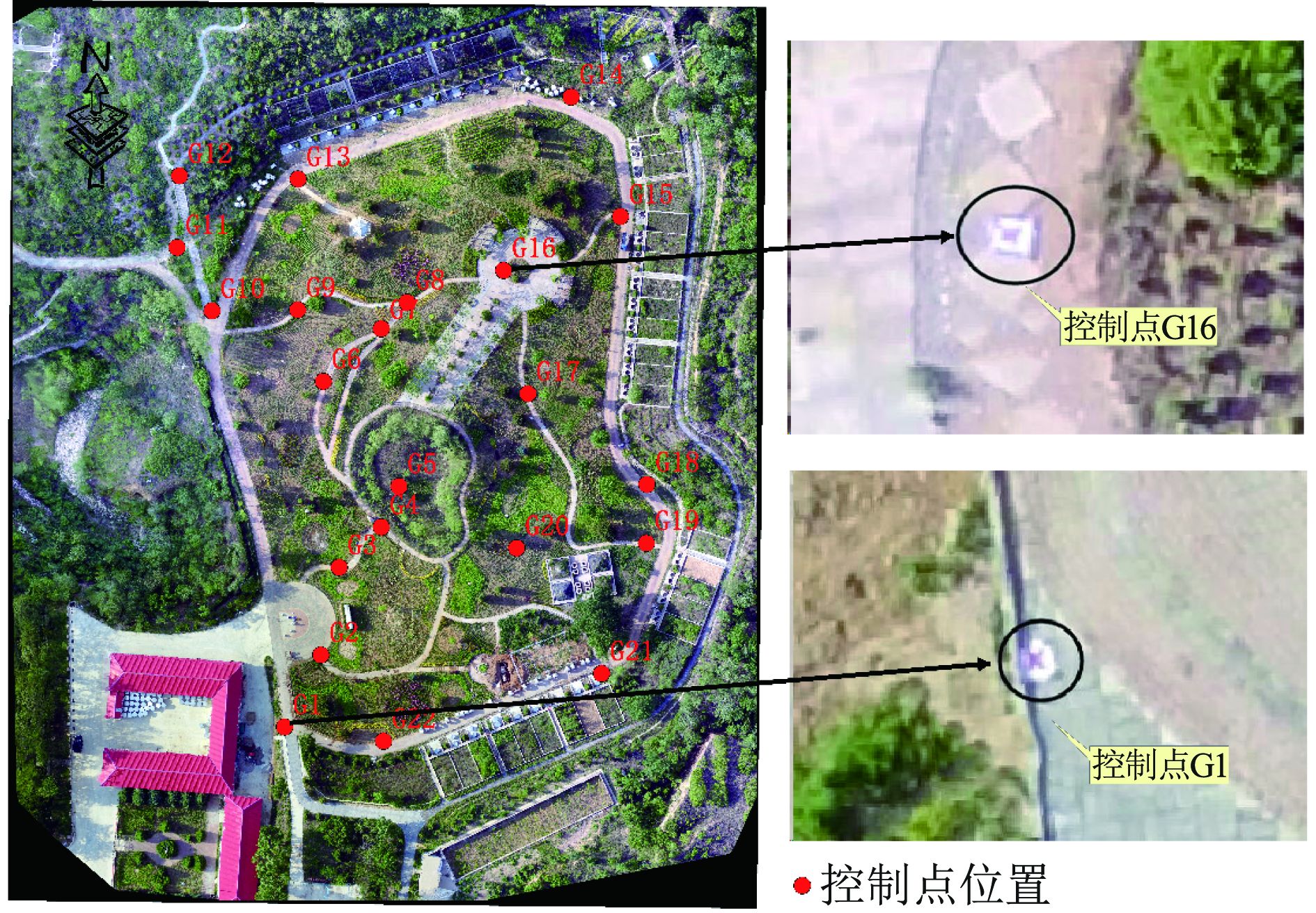
根据实际地形情况及国标控制点布点原则(王敏 等,2005),选取了22个地面控制点(图2),图2中红点代表控制点的空间分布,为保证点的稳定性,控制点布设在硬化路面上,利用差分GPS,对这22个点的3维坐标进行精确测量(表2)。控制点坐标的空间参考为WGS84椭球体,投影为高斯三度带投影,经纬度单位是弧度(rad),高程单位是m。
表 2 地面控制点的坐标
Table 2 The coordinate of GCP
| 编号 | X | Y | Z | 编号 | X | Y | Z | |
| G1 | 116.0687 | 40.4452 | 587.2995 | G12 | 116.0683 | 40.4464 | 591.3745 | |
| G2 | 116.0688 | 40.4453 | 587.2035 | G13 | 116.0687 | 40.4464 | 587.0805 | |
| G3 | 116.0688 | 40.4455 | 586.4835 | G14 | 116.0695 | 40.4466 | 587.1885 | |
| G4 | 116.0690 | 40.4456 | 587.2445 | G15 | 116.0696 | 40.4463 | 587.2265 | |
| G5 | 116.0690 | 40.4457 | 585.1745 | G16 | 116.0693 | 40.4462 | 587.3055 | |
| G6 | 116.0688 | 40.4460 | 587.0355 | G17 | 116.0694 | 40.4459 | 587.2405 | |
| G7 | 116.0689 | 40.4461 | 586.2125 | G18 | 116.0697 | 40.4457 | 587.2255 | |
| G8 | 116.0690 | 40.4461 | 587.0665 | G19 | 116.0697 | 40.4456 | 587.3425 | |
| G9 | 116.0687 | 40.4461 | 586.2985 | G20 | 116.0694 | 40.4456 | 587.2815 | |
| G10 | 116.0684 | 40.4461 | 586.4075 | G21 | 116.0696 | 40.4453 | 587.2855 | |
| G11 | 116.0683 | 40.4463 | 586.8365 | G22 | 116.0690 | 40.4451 | 587.2555 |
3 研究方法
3.1 获取影像数据
本研究使用大疆公司的精灵3专业版(Phantom-3-pro)无人机,按应用领域属于小型消费级(图3),其具有重量轻、成本低、灵活、便携、快速等优势,它搭载DJI FC300X普通相机,视场角为94°,图像大小为4000 像素×3000像素。具体的无人机基本参数见表3。

表 3 无人机基本参数
Table 3 UAV basic parameters
| 无人机型号 | Phantom-3-pro |
| 相机型号 | FC300X |
| 影像传感器 | Sony Exmor R CMOS |
| 相机像素 | 1200万(4000×3000) |
| 最大光圈 | f/2.8 |
| 相机焦距 | 20 mm |
| 视场角(FOV) | 94° |
| 最大航高 | 500 m |
| 起飞重量 | 1280 g |
| 最大平飞速度 | 16 m/s |
| 最大飞行时间 | 23 min |
| 工作环境温度 | 0 ℃—40 ℃ |
随着小型消费级无人机占领一定的市场,更多研究者已开始研制基于SDK开发模式的飞行控制系统,常用的飞控系统有AMP系列(含PIX系列)、WMC、Paparizza、OpenPilot等,实验选取的Pix4Dcapture(https://pix4d.com/ [2016-12-26])飞控系统,按照地面无线电遥控指令预先设置好的航高、航线、航向、重叠度来控制飞机的姿态与航迹,保证飞机稳定、精确地获取地形数据。
影像获取的主要流程包括:(1) 安装无人机和遥控器,并对其进行连接、校准与定位;(2) 在监视器上,打开飞控软件并设置航高、航线及重叠度;(3) 检查所有设置参数,起飞;(4) 按给予的指令自动完成飞行任务,降落;(5) 连接无人机上的储存设备到电脑,导出影像数据。
3.2 获取地面控制点坐标
地面控制点(GCP)是验证无人机获取地形信息精度的关键数据,控制点的精确3维坐标通常利用全站仪或差分GPS测量获得。本次地面控制点的测量,用的中海达新V30 GNSS RTK系统,其平面定位精度为±(10+1×10–6D) mm,高程定位精度为±(20+1×10–6D) mm,毫米级精度完全满足验证无人机产品精度的需求。
由于是精度验证实验,首先根据控制点布点规则及实地地形状况,在实验区均匀布置22个控制点;其次,将11个奇数编号的控制点作为检查点用来精度验证,另外11个偶数编号的点作为校准点用来校准立体像对(表2);最后,通过差分GPS实地测量获得每个地面控制点的空间平面及高程值(图4)。

3.3 数据处理
目前国内外有很多专业的无人机遥感影像处理软件,包括PixelGrid 、Pix4Dmapper、3Dsmart、Photoscan及Bundler等。不同的处理软件都有各自的优势,Pix4Dmapper更适用于航测影像处理,它采用创新科技,仅利用影像内容,自动处理从地面、轻型无人机或大飞机获取的航空数据 (https://pix4d.com/ [2016-12-26])。
本研究利用Pix4Dmapper专业影像处理软件(图5)。主要处理过程包括初步处理、空三加密及数字表面模型和数字正射影像图的生成。具体流程,(1) 确定内方位元素,校准相机;(2) 通过SIFT算法搜索和匹配同名点;(3) 利用同名点和影像自带的位置信息进行区域网平差,还原影像的位置与姿态;(4) 利用控制点或匹配点进行空三加密,生成影像点云;(5) 由影像点云生成数字表面模型,进而产生数字正射影像图。

4 结果与讨论
4.1 数据处理结果
野外获取的数据输入到专业处理软件中,生成正摄影像图(DOM)和数字表面模型(DSM)以及影像点云。图6为影像的重叠程度,绿色代表对同一区域有5张以上的影像覆盖,红色代表只有1张影像覆盖。为避免影像重叠度不足造成的误差,在拍摄时对同一区域要有5张以上影像。图7中是50 m航高下生成的结果,图7(a)代表数字正射影像图,图7(b)代表数字表面模型。图8是生成3维点云的截图。



4.2 结果分辨率及精度
精度是通过平均误差(mean)和相对均方根误差(RMSE)两个指标进行验证,具体如式(1)和式(2)所示,对所有控制点进行误差分析,计算结果见表4。
| ${M_{\rm{mean}}} = \frac{{\sum\limits_{i = 1}^n {\left( {{X_i} - {Y_i}} \right)} }}{n}$ | (1) |
| ${\rm{RMSE}} = \sqrt {\frac{{\sum\limits_{i = 1}^n {{{\left( {{X_i} - {Y_i}} \right)}^2}} }}{n}} $ | (2) |
式中,n代表测量次数;Xi代表测量值;Yi代表真实值。
表 4 6种航高下统计计算结果
Table 4 A statistical calculation results 6 kinds of navigation
| 航高/
m |
分辨率/
cm |
精度
类型 |
校准点精度/cm | 检查点精度/cm | |||||
| error X | error Y | error Z | error X | error Y | error Z | ||||
| 50 | 2.22 | Mmean | –0.19 | 0.31 | –3.75 | –1.62 | –1.07 | –4.20 | |
| RMSE | 3.79 | 2.17 | 5.46 | 3.20 | 2.78 | 5.93 | |||
| 60 | 2.59 | Mmean | –0.13 | 0.03 | –0.20 | –1.11 | –1.62 | –2.63 | |
| RMSE | 3.23 | 2.43 | 7.63 | 2.96 | 3.17 | 10.67 | |||
| 70 | 3.03 | Mmean | 0.21 | 0.54 | 0.57 | –0.67 | –0.84 | –2.43 | |
| RMSE | 3.42 | 2.23 | 10.63 | 2.80 | 2.73 | 8.64 | |||
| 80 | 3.43 | Mmean | 0.53 | 0.06 | –3.75 | –0.18 | –1.12 | –6.29 | |
| RMSE | 3.31 | 2.05 | 12.25 | 2.81 | 2.47 | 11.49 | |||
| 90 | 3.87 | Mmean | 0.26 | 0.03 | –8.98 | –1.33 | –1.20 | –10.55 | |
| RMSE | 3.56 | 1.78 | 12.16 | 2.59 | 2.62 | 14.08 | |||
| 100 | 4.23 | Mmean | 0.06 | 0.15 | –6.05 | –2.37 | –0.87 | –4.43 | |
| RMSE | 3.11 | 1.68 | 9.52 | 3.39 | 2.70 | 11.36 | |||
从表4中可得出,50 m和100 m航高下影像分辨率分别为2.22 cm和4.23 cm,存在一定倍数关系,同时随着航高的增加分辨率逐渐降低;为保证精度验证的可靠性,分别对校准点和检查点同时进行精度评价,其中,校准点平均误差最大为–8.98 cm,最小为0.03 cm,均方根误差最大为12.25 cm,最小为1.68 cm;检查点平均误差最大为–10.55 cm,最小为–0.18 cm,均方根误差最大为14.08 cm,最小为2.47 cm。
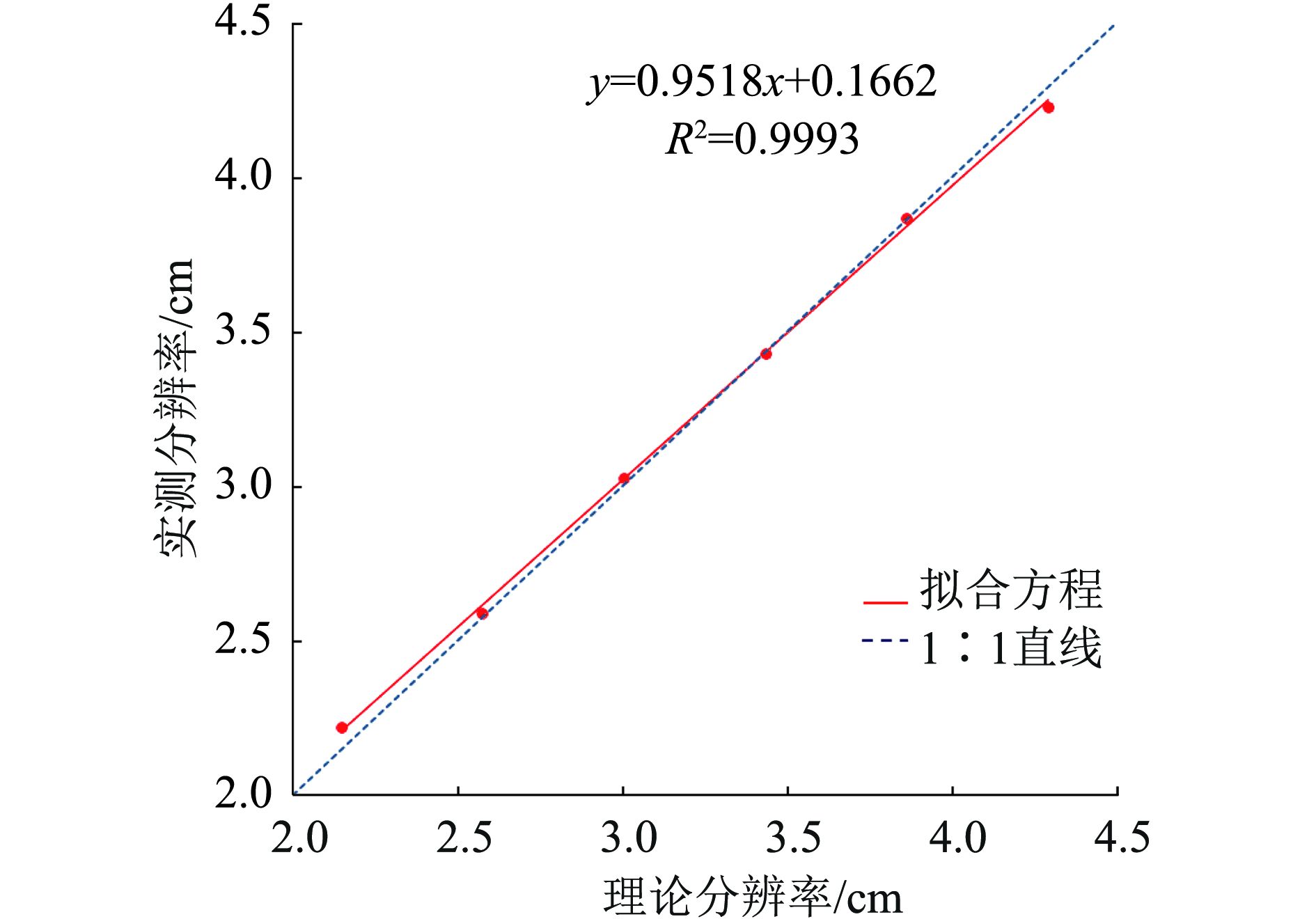
分辨率是评价影像质量的重要指标。无人机影像分辨率理论计算方法有2种,(1)通过公式RGSD=H·P/f,其中,RGSD代表地面分辨率,H代表航高,P代表CCD像元大小,f代表焦距;(2)通过传感器相机视场角(FOV)计算。本研究通过相机FOV,计算出不同航高下的理论分辨率(表5)。对理论与实测分辨率进行相关性分析(图9),回归方程y=0.9518x+0.1662,确定系数R2=0.9993,回归系数为0.9518;其中,直线为拟合方程,虚线为过原点斜率为1的线,两条线非常接近重合,说明两组数据具有很强的相关性,进而反映出实测数据分辨率的可靠性。
表 5 影像理论与实测分辨率
Table 5 Image theory and the measurement resolution
| /cm | ||
| 航高 | 理论分辨率 | 实测分辨率 |
| 50 | 2.14 | 2.22 |
| 60 | 2.57 | 2.59 |
| 70 | 3.00 | 3.03 |
| 80 | 3.43 | 3.43 |
| 90 | 3.86 | 3.87 |
| 100 | 4.29 | 4.23 |
4.3 水平及垂直方向(XYZ)误差
利用平均误差和相对均方根误差来验证水平及垂直方向的误差大小。水平方向误差,是指在水平方向上无人机测量值与真实值之间的偏差,包括X和Y方向。垂直方向误差,具体指高程上(Z方向)的误差。图10和图11中,每个点代表控制点的误差值,不同颜色代表不同的航高,正态曲线和箱形图代表误差分布,横轴代表不同航高,纵轴代表误差大小。
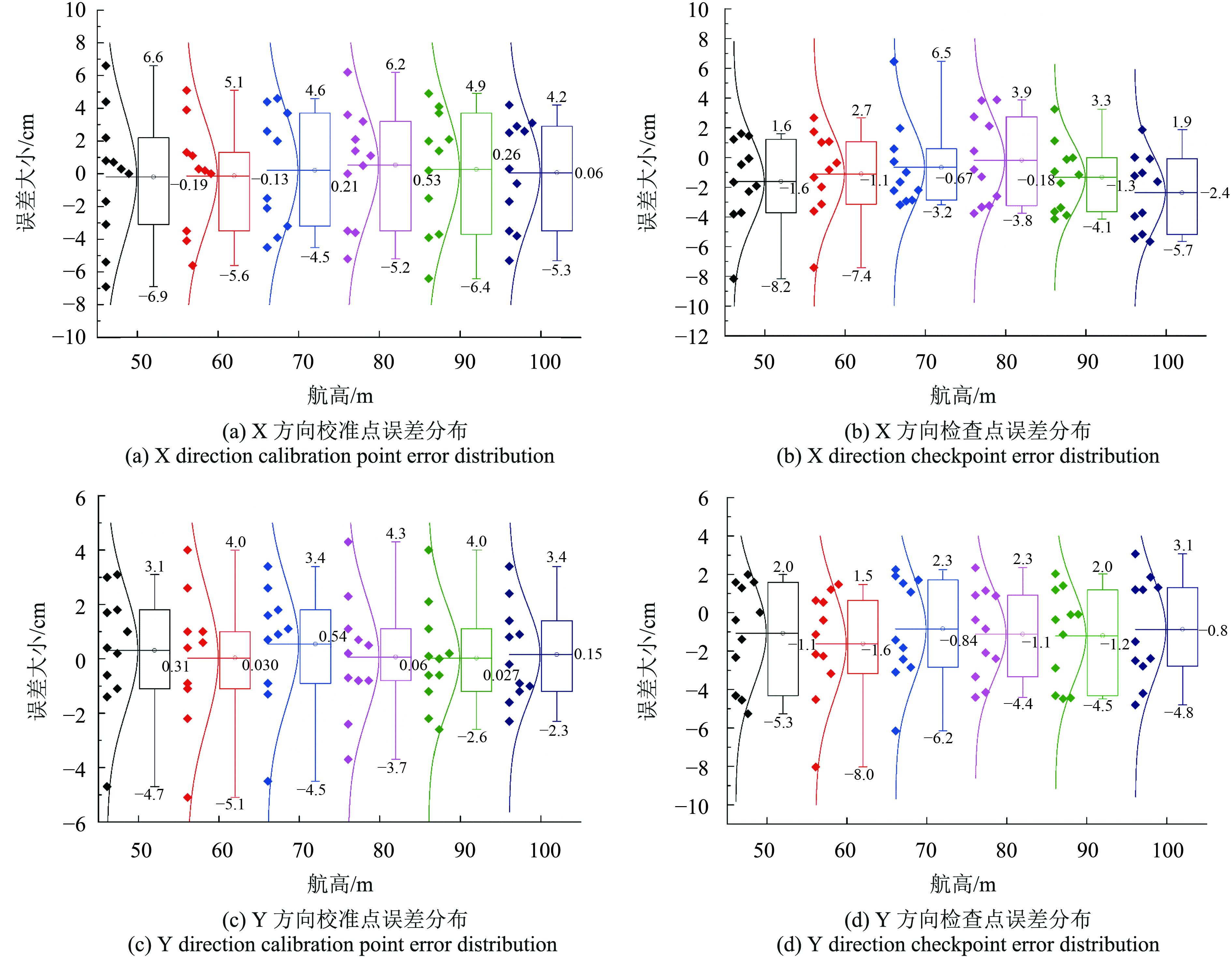
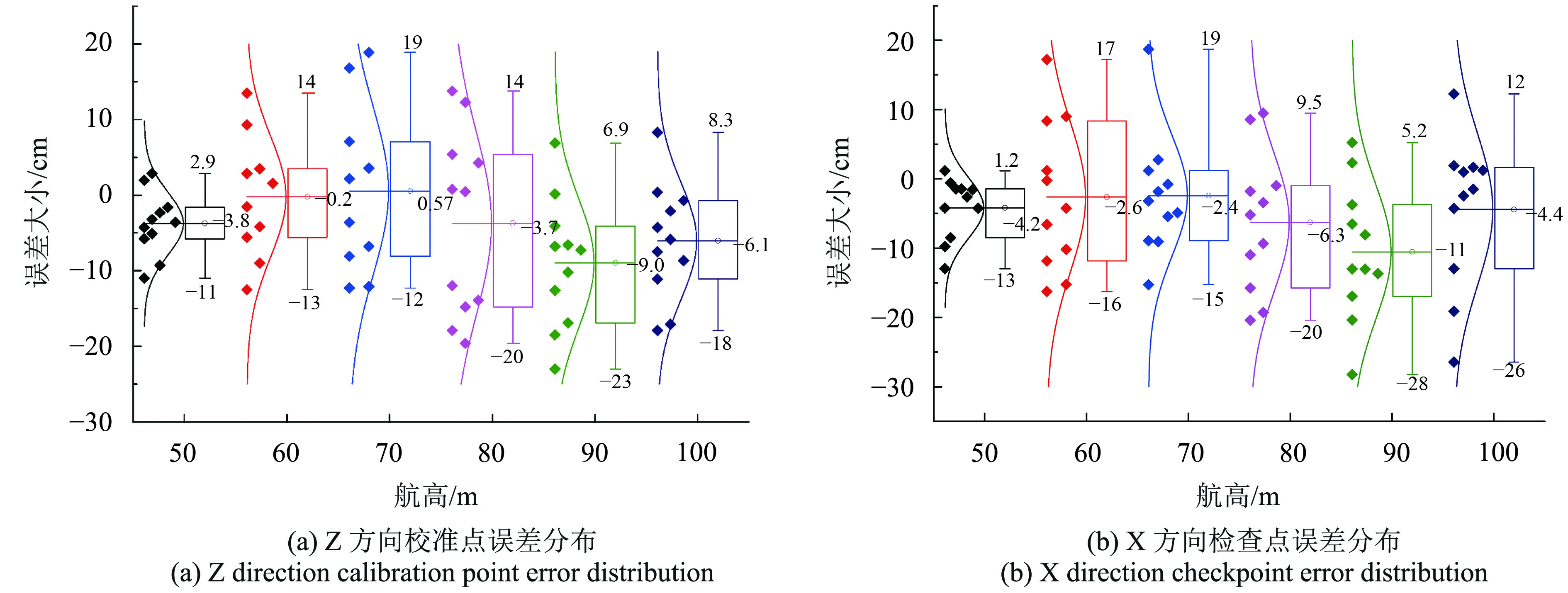
图10代表6种航高下水平方向误差分布。图10(a)显示X方向校准点的误差最大、最小值分别为6.6 cm和–6.9 cm,mean最大、最小值分别为0.53 cm和–0.19 cm;图10(b)显示X方向检查点的误差最大、最小值分别为6.5 cm和–8.2 cm,mean最大、最小值分别为–0.18 cm和–2.4 cm。图10(c)显示Y方向校准点的误差最大、最小值分别为4.3 cm和–5.1 cm,mean最大、最小值分别为0.54 cm和0.03 cm。图10(d)显示Y方向检查点的误差最大、最小值分别为2.3 cm和–8.0 cm,mean最大、最小值分别为–0.8 cm和–1.6 cm。
综述,可发现X和Y方向的误差分布都属于正态分布,且误差范围基本一致。然而,从校准点与检查点角度考虑,检查点整体误差略大于校准点,原因可能是立体像对是基于校准点进行绝对定位的,所以再用校准点进行精度评价会使误差分布变小。
图11代表6种航高下垂直方向误差分布。图11(a)显示Z方向校准点的误差最大、最小值分别为19 cm和–23 cm,mean最大、最小值分别为0.57 cm和–9 cm。图11(b)显示Z方向检查点的误差最大、最小值分别为19 cm和–28 cm,mean最大、最小值分别为–2.4 cm和–11 cm。
同水平方向得出规律类似,垂直方向的误差呈现正态分布,检查点的误差略大于校准点。但是,垂直方向的误差范围明显大于水平方向,原因可能差分GPS测量地面控制点坐标时,本身垂直精度就低于水平精度。
4.4 飞控系统下整体误差
影响小型无人机测绘精度的因素,除无人机自身外,飞控系统也非常重要。本研究所用Pix4Dcapture飞控系统是能将小型消费级无人机转换成专业测绘的工具(https://pix4d.com/ [2016-12-26]),具有高精度的姿态与航迹控制性能,抗扰动能力强、控制精度及稳定性不因飞机的重心、重量的变化而受影响,能创建带有地理参考信息的3维模型及2维地图,它主要针对大疆无人机且有很好的兼容与匹配性(Vautherin 等,2016;Car 等,2016),如Phantom 3和4、Inspire 1、Mavic Pro及Matrice 100等。
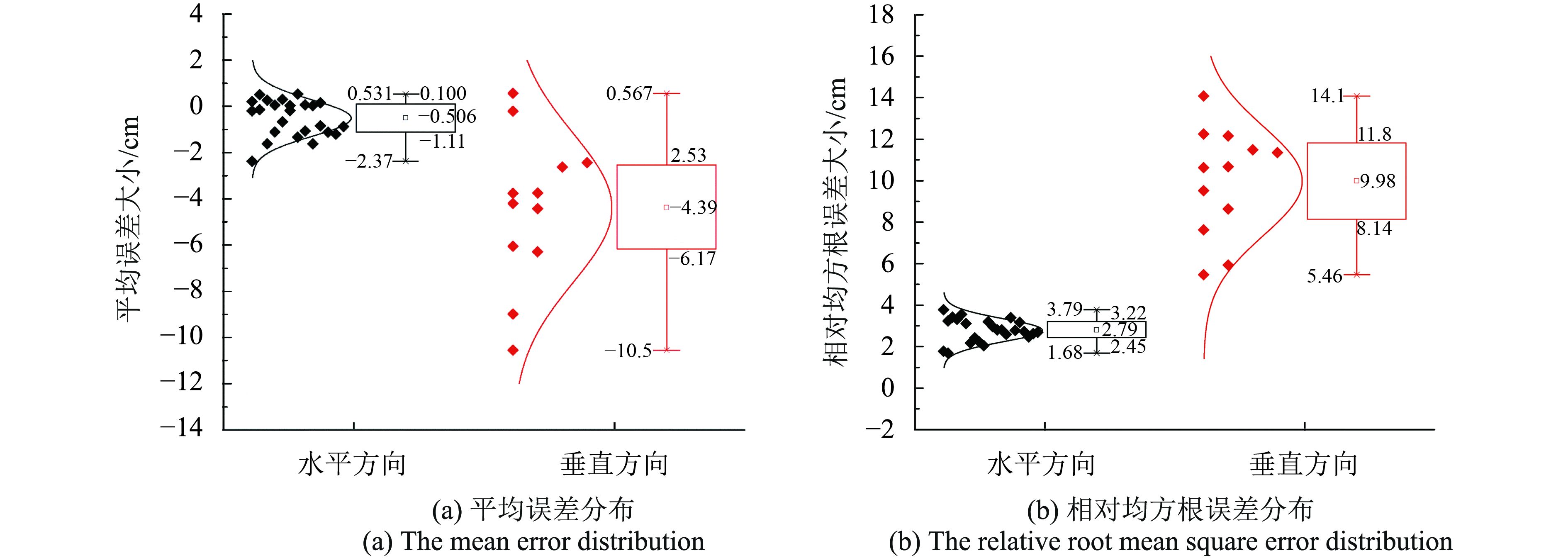
图12代表整体误差分布,横轴表示不同方向,纵轴代表误差大小。图12(a)显示平均误差水平方向范围在–2.37—0.53 cm,均值–0.51 cm,垂直方向范围在–10.6—0.57 cm,均值–4.39;图12(b)显示相对均方根误差水平方向范围在1.68—3.79 cm,均值2.79 cm,垂直方向范围在5.46—14.1 cm,均值9.98 cm。
综述,垂直方向的精度明显低于水平方向,平均误差约8倍关系,相对均方根误差约3倍关系。整体分析,水平方向平均误差为±0.51 cm,垂直方向平均误差为±4.39 cm;相对均方根误差水平方向为±2.79 cm,垂直方向为±9.98 cm。这表明,研究中获取的数据精度达到了厘米级。
4.5 数据误差来源特异性分析
实验误差受多种因素影响,本研究主要从野外数据获取、后期处理方法两个方面及其造成数据结果精度的差异入手,对误差来源进行探索与分析。
野外数据包括获取无人机影像与量测GCP高精度坐标。影像获取质量主要受限于无人机稳定性及传感器类型。通常,考虑多旋翼桨叶与空气受力面积大小,4旋翼无人机稳定性高于6或8旋翼,本研究所用无人机经大量野外实践发现具有很好的稳定性(5级风力下能稳定执行任务);传感器对获取数据精度具有关键作用,本研究所用传感器属于广角镜头,这会导致远离影像中心的数据出现更大的畸变,但这种镜头拍摄面积更大,利于野外地理生态调查与地形地貌获取工作。此外,选择太阳高度角接近90°、晴朗天气的时间段飞行,也会提高影像获取质量。由于无人机上GPS定位精度低,因此GCP是影像校正与精度验证的关键数据,其坐标的获取精度直接影响精度评价结果(Ruzgienė 等,2015)。本研究利用地面差分GPS量测GCP坐标,定位精度能达到毫米级,完全满足无人机精度验证工作。
后期处理软件对数据精度也有一定影响。常用的数据处理软件中,3Dsmart和Photoscan 3维建模效果较好,而本研究所用Pix4Dmapper更适用于航测影像处理(Turner 等,2014b)。Pix4Dmapper对结果产生的整体误差要小于Photoscan,水平标准偏差为±19 mm,垂直标准偏差为±28 mm(Georgopoulos 等,2016)。
综述,以上两个方面累计误差会导致数据结果精度在水平方向与垂直方向有所差异,垂直方向精度相对较低。原因主要有3点,(1)差分GPS的高程定位精度低于水平定位精度,导致GCP获取的坐标精度垂直方向低于水平方向;(2)无人机影像获取分为垂直和倾斜拍摄,本文所用垂直拍摄方式,会引起垂直方向畸变大于水平方向;(3)Pix4Dmapper处理方法,垂直标准偏差大于水平标准偏差(Georgopoulos 等,2016)。
5 结 论
本文应用小型消费级无人机(Phantom 3 professional)进行地形测量,以6种航高(50 m、60 m、70 m、80 m、90 m和100 m)获取实验区的立体像对,生成正摄影像图(DOM)、数字表面模型(DSM)以及影像点云(point cloud)等数据,通过实测地面控制点进行精度验证,得出如下结论:
实验结果表明,该类无人机获取数据的水平方向平均误差为±0.51 cm,垂直方向平均误差为±4.39 cm;相对均方根误差(RMSE)水平方向为±2.79 cm,垂直方向为±9.98 cm;50 m和100 m航高下影像分辨率分别为2.22 cm和4.23 cm,影像分辨率随着航高增加而降低;水平与垂直方向的误差呈现正态分布,垂直方向的误差范围明显大于水平方向;
为避免影像重叠度不足造成的误差,生成高质量数据,建议在拍摄时对同一区域要有5张以上影像覆盖。同时,为保证绝对定位的精度,控制点要均匀布设在测区,也要能在5张以上影像找到;
研究中仅从野外地形数据角度进行误差分析,数据来源相对单一。在今后的工作中,会从多种数据角度(如城市、建筑等)综合分析,更好的体现其前瞻性与实用性。同时,实验误差由多种因素累计造成,如光线、飞行稳定性以及天气状况等。
综上所述,小型消费级无人机在飞控系统下的测量精度可达厘米级,这不仅为野外地理与生态调查工作者提供一种低成本、快速、灵活与精确获取地形信息的新型测量手段,弥补大型专业级无人机的局限,同时本研究还为使用此类无人机做航测应用和飞行参数设置提供一定参考。
志 谢 此次实验利用大疆公司的无人机和Pix4D公司的产品获取与处理数据,在此表示衷心的感谢!
参考文献(References)
-
Anderson K and Gaston K J. 2013. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Frontiers in Ecology and the Environment, 11 (3): 138–146. [DOI: 10.1890/120150]
-
Bhardwaj A, Sam L, Martín-Torres F J and Kumar R. 2016. UAVs as remote sensing platform in glaciology: present applications and future prospects. Remote Sensing of Environment, 175 : 196–204. [DOI: 10.1016/j.rse.2015.12.029]
-
Car M, Jurić Kaćunić D and Kovačević M S. 2016. Application of unmanned aerial vehicle for landslide mapping//Paar R, Marendić A and Zrinjski M, eds. Proceedings of the International Symposiun on Engineering Geodesy-SIG. Zagreb: Croatian Geodetic Society: 549–559
-
Chen Z X, Ren J Q, Tang H J, Shi Y, Leng P, Liu J, Wang L M, Wu W B, Yao Y M and Hasiyuya. 2016. Progress and perspectives on agricultural remote sensing research and applications in China. Journal of Remote Sensing, 20 (5): 748–767. [DOI: 10.11834/jrs.20166214] ( 陈仲新, 任建强, 唐华俊, 史云, 冷佩, 刘佳, 王利民, 吴文斌, 姚艳敏, 哈斯图亚. 2016. 农业遥感研究应用进展与展望. 遥感学报, 20 (5): 748–767. [DOI: 10.11834/jrs.20166214] )
-
Cho S J, Bang E S and Kang I M. 2015. Construction of precise digital terrain model for nonmetal open-pit mine by using unmanned aerial photograph. Economic and Environmental Geology, 48 (3): 205–212. [DOI: 10.9719/EEG.2015.48.3.205]
-
Clapuyt F, Vanacker V and Van Oost K. 2016. Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology, 260 : 4–15. [DOI: 10.1016/j.geomorph.2015.05.011]
-
Dandois J P, Olano M and Ellis E C. 2015. Optimal altitude, overlap, and weather conditions for computer vision UAV estimates of forest structure. Remote Sensing, 7 (10): 13895–13920. [DOI: 10.3390/rs71013895]
-
Georgopoulos A, Oikonomou C, Adamopoulos E and Stathopoulou E K. 2016. Evaluating unmanned aerial platforms for cultural heritage large scale mapping//ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Prague, Czech Republic: ISPRS: 355–362 [DOI: 10.5194/isprs-archives-XLI-B5-355-2016]
-
Harder P, Schirmer M, Pomeroy J and Helgason W. 2016. Accuracy of snow depth estimation in mountain and prairie environments by an unmanned aerial vehicle. The Cryosphere, 10 (6): 2559–2571. [DOI: 10.5194/tc-10-2559-2016]
-
Hodgson J C, Baylis S M, Mott R, Herrod A and Clarke R H. 2016. Precision wildlife monitoring using unmanned aerial vehicles. Scientific Reports, 6 : 22574 [DOI: 10.1038/srep22574]
-
Jordan B R. 2015. A bird’s-eye view of geology: the use of micro drones/UAVs in geologic fieldwork and education. GSA Today, 25 (7): 50–52. [DOI: 10.1130/GSATG232GW.1]
-
Kraaijenbrink P, Meijer S W, Shea J M, Pellicciotti F, De Jong S M and Immerzeel W W. 2016. Seasonal surface velocities of a Himalayan glacier derived by automated correlation of unmanned aerial vehicle imagery. Annals of Glaciology, 57 (71): 103–113. [DOI: 10.3189/2016AoG71A072]
-
Lee S and Choi Y. 2015. Topographic survey at small-scale open-pit mines using a popular rotary-wing unmanned aerial vehicle (drone). Tunnel and Underground Space, 25 (5): 462–469. [DOI: 10.7474/TUS.2015.25.5.462]
-
Li D R. 2016. The " Internet Plus” space-based information services. Journal of Remote Sensing, 20 (5): 708–715. [DOI: 10.11834/jrs.20166222] ( 李德仁. 2016. 论" 互联网+”天基信息服务. 遥感学报, 20 (5): 708–715. [DOI: 10.11834/jrs.20166222] )
-
Li D R, Chen X L and Cai X B. 2008. Spatial information techniques in rapid response to Wenchuan earthquake. Journal of Remote Sensing, 12 (6): 841–851. [DOI: 10.11834/jrs.200806113] ( 李德仁, 陈晓玲, 蔡晓斌. 2008. 空间信息技术用于汶川地震救灾. 遥感学报, 12 (6): 841–851. [DOI: 10.11834/jrs.200806113] )
-
Li D R and Li M. 2014. Research advance and application prospect of unmanned aerial vehicle remote sensing system. Geomatics and Information Science of Wuhan University, 39 (5): 505–513, 540. [DOI: 10.13203/j.whugis20140045] ( 李德仁, 李明. 2014. 无人机遥感系统的研究进展与应用前景. 武汉大学学报(信息科学版), 39 (5): 505–513, 540. [DOI: 10.13203/j.whugis20140045] )
-
Liu X F, Lyu Q, He S L, Yi S L, Xie R J, Zheng Y Q, Hu D Y, Wang Z T and Deng L. 2015. Estimation of nitrogen and pigments content in citrus canopy by low-altitude remote sensing. Journal of Remote Sensing, 19 (6): 1007–1018. [DOI: 10.11834/jrs.20155078] ( 刘雪峰, 吕强, 何绍兰, 易时来, 谢让金, 郑永强, 胡德玉, 汪志涛, 邓烈. 2015. 柑橘植株冠层氮素和光合色素含量近地遥感估测. 遥感学报, 19 (6): 1007–1018. [DOI: 10.11834/jrs.20155078] )
-
Messinger M, Asner G P and Silman M. 2016. Rapid assessments of amazon forest structure and biomass using small unmanned aerial systems. Remote Sensing, 8 (8): 615 [DOI: 10.3390/rs8080615]
-
Neitzel F and Klonowski J. 2011. Mobile 3D mapping with a low-cost UAV system//ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Zurich, Switzerland: ISPRS, 38: 1–6
-
Neugirg F, Stark M, Kaiser A, Vlacilova M, Della Seta M, Vergari F, Schmidt J, Becht M and Haas F. 2016. Erosion processes in calanchi in the Upper Orcia Valley, Southern Tuscany, Italy based on multitemporal high-resolution terrestrial LiDAR and UAV surveys. Geomorphology, 269 : 8–22. [DOI: 10.1016/j.geomorph.2016.06.027]
-
Pierzchała M, Talbot B and Astrup R. 2014. Estimating soil displacement from timber extraction trails in steep terrain: Application of an unmanned aircraft for 3D modelling. Forests, 5 (6): 1212–1223. [DOI: 10.3390/f5061212]
-
Ruzgienė B, Berteška T, Gečyte S, Jakubauskienė E and Aksamitauskas V Č. 2015. The surface modelling based on UAV photogrammetry and qualitative estimation. Measurement, 73 : 619–627. [DOI: 10.1016/j.measurement.2015.04.018]
-
Turner D, Lucieer A, Malenovský Z, King D H and Robinson S A. 2014a. Spatial co-registration of ultra-high resolution visible, multispectral and thermal images acquired with a micro-UAV over Antarctic Moss Beds. Remote Sensing, 6 (5): 4003–4024. [DOI: 10.3390/rs6054003]
-
Turner D, Lucieer A and Wallace L. 2014b. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Transactions on Geoscience and Remote Sensing, 52 (5): 2738–2745. [DOI: 10.1109/TGRS.2013.2265295]
-
Vautherin J, Rutishauser S, Schneider-Zapp K, Choi H F, Chovancova V, Glass A and Strecha C. 2016. Photogrammetric accuracy and modeling of rolling shutter cameras. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, 3 (3): 139–146. [DOI: 10.5194/isprs-annals-III-3-139-2016]
-
Vivoni E R, Rango A, Anderson C A, Pierini N A, Schreiner-McGraw A P, Saripalli S and Laliberte A S. 2014. Ecohydrology with unmanned aerial vehicles. Ecosphere, 5 (10): 1–14. [DOI: 10.1890/ES14-00217.1]
-
Wang M, Zhang Z S, Xu M Y, Zhou W, Li P and You X Q. 2005. Data processing and accuracy analysis of national 2000’ GPS geodetic control network. Chinese Journal of Geophysics, 48 (4): 817–823. [DOI: 10.3321/j.issn:0001-5733.2005.04.013] ( 王敏, 张祖胜, 许明元, 周伟, 李鹏, 尤晓青. 2005. 2000国家GPS大地控制网的数据处理和精度评估. 地球物理学报, 48 (4): 817–823. [DOI: 10.3321/j.issn:0001-5733.2005.04.013] )
-
Watts A C, Ambrosia V G and Hinkley E A. 2012. Unmanned aircraft systems in remote sensing and scientific research: classification and considerations of use. Remote Sensing, 4 (6): 1671–1692. [DOI: 10.3390/rs4061671]
-
Xiang HT and Tian L. 2011. Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosystems Engineering, 108 (2): 174–190. [DOI: 10.1016/j.biosystemseng.2010.11.010]
-
Xu G H, Liu Q H, Chen L F and Liu L Y. 2016. Remote sensing for China’s sustainable development: opportunities and challenges. Journal of Remote Sensing, 20 (5): 679–688. [DOI: 10.11834/jrs.20166308] ( 徐冠华, 柳钦火, 陈良富, 刘良云. 2016. 遥感与中国可持续发展: 机遇和挑战. 遥感学报, 20 (5): 679–688. [DOI: 10.11834/jrs.20166308] )
-
Zahawi R A, Dandois J P, Holl K D, Nadwodny D, Reid J L and Ellis E C. 2015. Using lightweight unmanned aerial vehicles to monitor tropical forest recovery. Biological Conservation, 186 : 287–295. [DOI: 10.1016/j.biocon.2015.03.031]
-
Zarco-Tejada P J, Diaz-Varela R, Angileri V and Loudjani P. 2014. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. European Journal of Agronomy, 55 : 89–99. [DOI: 10.1016/j.eja.2014.01.004]
-
Zhou J P, Gong J H, Wang T, Wang D C, Yang L Y, Zhao X J, Hong Y and Zhao Z M. 2008. Study on UAV remote sensing image acquiring and visualization management system for the area affected by 5•12 Wenchuan earthquake. Journal of Remote Sensing, 12 (6): 877–884. [DOI: 10.3321/j.issn:1007-4619.2008.06.009] ( 周洁萍, 龚建华, 王涛, 汪东川, 杨荔阳, 赵向军, 洪宇, 赵忠明. 2008. 汶川地震灾区无人机遥感影像获取与可视化管理系统研究. 遥感学报, 12 (6): 877–884. [DOI: 10.3321/j.issn:1007-4619.2008.06.009] )


