
|
收稿日期: 2016-05-16; 修改日期: 2016-09-08; 优先数字出版日期: 2016-09-15
基金项目: 国家自然科学基金(编号:41471355,41301477)
第一作者简介: 行晓黎(1985— ),女,博士研究生,研究方向为极化SAR图像处理与信息提取。E-mail:
cug_xxl@163.com
通讯作者简介: 刘修国(1969— )男,教授,研究方向为遥感影像信息提取与3S集成。E-mail:
liuxg318@163.com
中图分类号: TP751
文献标识码: A
|
摘要
相干斑抑制是极化合成孔径雷达(PolSAR)图像分析的重要预处理步骤。为了更好地抑制极化SAR图像中的相干斑,本文综合目标的异质性和结构信息,提出基于目标异质性的非局部均值滤波方法。首先利用K分布距离度量目标的异质性,并以异质性为基础,保留图像中的点、线等高异质性目标;然后计算图像块之间的异质性差异,最后将其作为度量非局部均值加权滤波像元相似性的权重系数,实现对PolSAR图像的相干斑抑制。实验对比结果表明:本文方法能够有效地抑制相干斑,同时对细节信息和极化信息也具有良好的保持性,能够为后续的图像应用提供支持。
关键词
极化SAR, 相干斑, 滤波, 非局部均值, 异质性
Abstract
Polarimetric Synthetic Aperture Radar (PolSAR) occupies an important place in remote sensing because it provides richer information about the targets and earth surface compared with single-channel SAR systems. However, PolSAR data is contaminated by speckle noise due to the coherent imaging mechanism, which considerably affects the accuracy of target classification and recognition. Therefore, speckle-noise filtering of PolSAR images is a crucial pretreatment. Nonlocal(NL) means compute the weights between two pixels with similar surrounding neighborhoods (known as patches) instead of two individual pixels. Considering that patches contain structural information, the NL mean filter preserves repetitive structures and performs better than other filters. The key point of the NL algorithm is the similarity criterion setting or the patch weights. This paper proposes a technique to reduce speckle noise using NL means by combining structure and homogeneity similarity. First, image heterogeneity is measured based on the distance of K distribution and is further utilized to distinguish homogeneous and heterogeneous regions. In PolSAR imagery, backscattering from point targets is significantly different from that of distributed media. Strong backscattering from point targets is caused by strong elementary scatterers within a resolution cell. They lack the typical characteristics of speckle and are not random in nature. The preservation of signatures from strong point targets and man-made structures is desired for image interpretation and other applications. In this paper, various samples are collected based on scene heterogeneity. A threshold is utilized to preserve the point and line targets. Then, a new strategy is presented to adapt to the changes in the heterogeneity of the image, which sets the weights of the NL means that were implemented between patches based on the heterogeneity coefficient. Finally, the filtered image is computed. The obtained filter is compared with the refined Lee, mean shift, NLLee, and WisNLTV filters. The qualitative and quantitative aspects of the filters were compared. To compare the ability of the filters to maintain details, corresponding areas in the enlarged span images are shown after filtering with various methods. The proposed method is significantly better on the global and local scales than the existing methods. Moreover, results of H/A/α decomposition show that the proposed method effectively converges the same scattering mechanism and retains complicated scattering mechanisms. The quantitative assessment verifies the equivalent number of looks (a measure of noise reduction), the edge-preserving index, and polarization information preservation on real images. The proposed method has improved filtering performance. The concept of accounting for the heterogeneity coefficient within the NL means algorithm is implemented. The proposed method filters adaptively based on heterogeneity. In addition, comparative results confirm the advantages of the proposed algorithm on both speckle reduction and detail preservation.
Key words
polarimetric SAR, speckle, filtering, nonlocal means, heterogeneity
1 引 言
极化合成孔径雷达(PolSAR)为地球表面参数估计提供了有效且可靠的信息收集手段,是重要的遥感信息源(Deledalle 等,2015)。由于相干成像方式所致的相干斑噪声,使得PolSAR图像的分析处理比较困难,抑制相干斑就成为信息提取前的一项重要处理步骤(Nie 等,2015)。
早期常用的PolSAR图像相干斑抑制方法有极化白化滤波(PWF)(Novak和Burl,1990)、最优加权滤波(Lee 等,1992)等为代表的极化域滤波算法,这类滤波算法能够有效地抑制相干斑和保持图像分辨率,但同时会引入通道串扰丢失极化信息(肖世忱 等,2015)。精制极化Lee(Lee 等,1999)、IDAN(Vasile 等,2006)等空域滤波算法弥补了这种缺陷,通过选取同质像元估计中心像元值,能够有效地抑制相干斑。但是这些算法大多由当前像元和局部或半局部的邻域像元信息来计算,对图像的结构信息利用不足,尤其在边缘细节信息丰富的异质区域,能够利用的同质像元较少,抑制相干斑的同时容易造成边缘细节信息的丢失(马晓双 等,2015;Nie 等,2016)。非局部均值滤波算法通过扩展同质像元的搜寻范围,并利用图像块(patch)的结构(Liu和Zhong,2014)相似性作为均值滤波的加权权重,改进了传统算法根据单像元加权的缺点,更好的利用了图像的结构信息,能够良好的保持图像的纹理信息(杨学志 等,2012)。基于最大似然估计(Deledalle 等,2009)、贝叶斯估计(陈建宏 等,2015)以及Wishart分布(Chen 等,2011;Zhong 等,2014)等多种相似性检验方法的非局部滤波算法对PolSAR图像都有显著的滤波效果,然而在图像中相似性结构较少、冗余信息不足的区域,非局部均值算法会出现过滤波现象,丢失边缘细节信息。
在PolSAR图像滤波中,为了达到好的滤波效果,独立的点、线以及同质和异质区域需要不同程度的滤波(Lee 等,2015)。异质性能够比较客观定量的描述不同场景的纹理特性差异,作为反映图像区域中不同场景之间差异程度的关键参数,已被广泛应用于空域自适应滤波算法中(Lopes 等,1990;Li 等,2013)。因此,本文综合考虑图像的异质性和结构信息,提出一种基于PolSAR图像异质性的非局部均值滤波方法。该方法首先度量图像中地物的异质性,保留图像中的点、线等高异质性的目标;然后计算图像块之间的异质性差异,作为度量中心像元估计值的权重系数,最终获得非局部均值滤波结果图像。
2 PolSAR图像异质性度量
图像局部统计标准差与均值之比的变差系数(CoV)是一种常用的SAR图像异质性检验指标(Li 等,2013;Lang 等,2015),总功率SPAN图像的变差系数CoV也被扩展用于度量PolSAR图像的异质性(Lang 等,2015;Ma 等,2015)。该方法只利用了图像的部分信息,为此,本文提出基于PolSAR图像相干矩阵K分布距离的异质性度量方法。
2.1 PolSAR数据
目标的极化信息可以由Sinclair散射矩阵表示为(Lee和Pottier,2009)
| ${ S} = \left[ {\begin{array}{*{20}{c}}{{S_{HH}}}&{{S_{HV}}}\\{{S_{VH}}}&{{S_{VV}}}\end{array}} \right]$ | (1) |
式中,SHH和SVV项包含了同极化通道回波功率,SHV和SVH则包含了交叉极化通道回波功率。
在满足互易定理的情况下,单站PolSAR的Pauli基矢量 k可表示为
| ${k} = \frac{1}{{\sqrt 2 }}{\left[ {{S_{HH}} + {S_{VV}}\;\;{S_{HH}} - {S_{VV}}\;\;2{S_{HV}}} \right]^{\rm T}}$ | (2) |
式中,T表示转置。
L视处理的相干矩阵 T则表示为
| ${T} = \left\langle {{k}{{k}^{*{\rm T}}}} \right\rangle = \frac{1}{L}\sum\limits_{i = 1}^L {{ k}(i){ k}{{(i)}^{*{\rm T}}}} $ | (3) |
式中,
2.2 K距离计算
随着PolSAR图像分辨率的不断提高,图像中目标异质性增强,K分布能够较好的适用于高分辨率PolSAR图像(Lee和Pottier,2009),K分布概率密度函数如式(4):
| $p({T}) = \frac{{2{{\left| {T} \right|}^{L - q}}{{\left( {L\alpha } \right)}^{\left( {\alpha + qL} \right)/2}}}}{{K(L,q) \varGamma \left( \alpha \right)}} \cdot \frac{{{K_{a - qL}}\left( {2\sqrt {tr\left( {{\varSigma ^{ - 1}}{T}} \right)L\alpha } } \right)}}{{{{\left| \varSigma \right|}^L}tr{{\left( {{\varSigma ^{ - 1}}{T}} \right)}^{\left( {qL - \alpha } \right)/{\rm{2}}}}}}$ | (4) |
式中,
本文根据Wishart距离度量(Lee 等,1994),利用K分布概率密度函数式(4)推导了K距离度量式(5):
| $\begin{aligned}d({T},{C}) = & \ln (K(L,q)) + \ln (\varGamma (\alpha )) + L\ln (\left| {C} \right|)\\ & + \frac{{qL - \alpha }}{2}\ln (tr({{C}^{ - 1}}{T})) - (L - q)\ln (2\left| {T} \right|)\\ & - \frac{{\alpha + qL}}{2}\ln (L\alpha ) - \ln ({K_{\alpha - qL}}(2\sqrt {tr({{C}^{ - 1}}{T})L\alpha } ))\end{aligned}$ | (5) |
式中, C表示滑动窗中像元矩阵均值。
2.3 异质性度量
在PolSAR图像中,均质区域的地物类型比较一致,度量像元之间相似性的距离会比较相近,反之,在异质区域,地物类型复杂,距离差别较大,因此,可以根据距离的波动性度量图像像元的异质性。
首先,计算滑动窗中像元的平均值 C,通过式(5)推导的K分布距离,计算滑动窗中各个像元 Ti与该窗中像元平均值 C的距离di。如果局部区域异质性低,各个像元计算得到的距离di的标准差就较小,反之,距离di的波动性会比较大,标准差随之增大。因此,本文用该距离标准差作为度量图像异质性的指标I,即每个n×n像元的滑动窗中计算出的n×n个距离di的标准差,如式(6)所示。
| $I = \sqrt {{\mathop{\rm var}} ({d_i})} $ | (6) |
3 顾及目标异质性的非局部均值滤波
Buades等人(2005)提出了非局部均值滤波算法,该算法的思想是根据图像中的结构相似性代替单个像元的相似性,更大范围的利用图像的冗余信息来估计像元值,在数字图像中取得了较好的滤波效果,其形式表示为(Torres 等,2014)
| $\hat { u}(x) = \frac{{\rm{1}}}{{Z(x,y)}}\sum\limits_{y \in {{\varOmega}} } {w(x,y){ u}(y)} $ | (7) |
式中,
u(y)表示观测像元值;
度量像元之间的相似性是非局部均值算法的一个关键问题,在本文方法中,像元之间的相似性是由结构信息和异质性综合决定的,根据式(6)可以计算出每个像元的异质性,得到一幅异质性图像,在异质性图像中利用非局部的思想,计算像元点所在的图像块向量之间的相似程度,则加权系数表示为
| $w(x,y) = \exp (\left\| {{I}\left( {{{N}_x}} \right) - {I}\left( {{{N}_y}} \right)} \right\|_2^2/{h^2})$ | (8) |
顾及目标异质性的非局部均值滤波算法流程如下:
步骤1 根据第1节中方法计算像元异质性;
步骤2 在异质性图像中选取点目标等强目标样本,根据样本异质性值确定阈值Imax;
步骤3 根据阈值分段滤波,在异质性图像中,当像元值大于等于阈值Imax,保留原始图像中相应的像元,不做处理;剩余像元由步骤4处理;
步骤4 通过式(6)—(8)计算基于异质性图像的非局部加权系数,用非局部均值方法进行滤波。
4 实验结果与分析
首先采用德国Oberpfaffenhofen地区ESAR系统L波段2×2视处理数据来验证本文相干斑抑制方法的有效性,图像区域中包括林地、建筑物、农田和道路等多种地物,如图1所示。

4.1 异质性判断检验
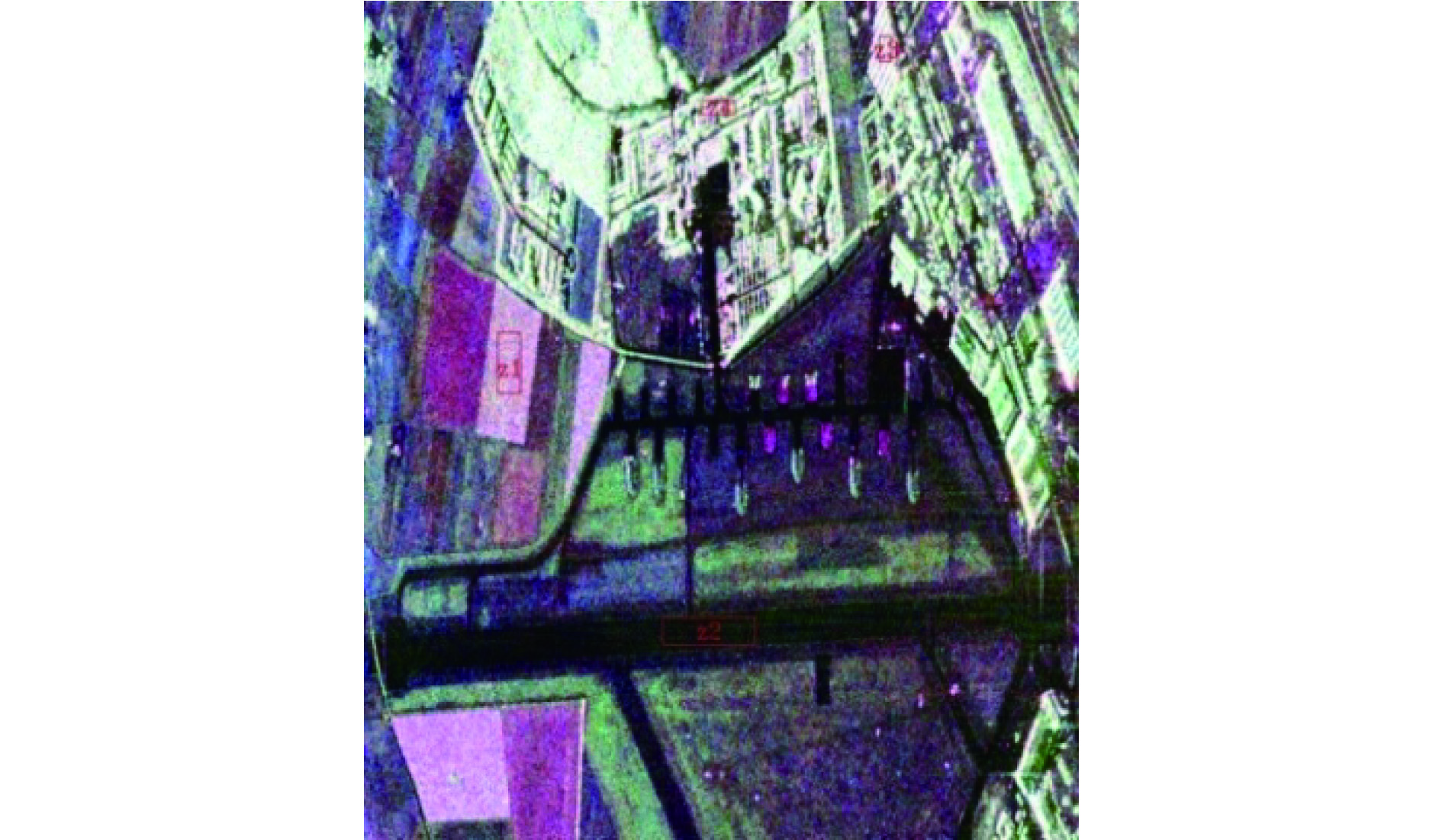
利用第2节中的异质性度量方法对实验区域进行计算,获得异质性图像如图2所示。从图像中可以看出,图像受噪声影响较大,但建筑区、田块边界等不同异质性的地物能够被较好的区分开,而且由于该异质性度量没有平均图像像元,异质性图像中点、线等地物目标没有扩散现象。

为了更好地保留强目标信息,确定阈值Imax,从图像中选取比较纯的点、边缘、城区、林地、农田等典型的地物,计算其异质性值I,如表1所示。
表 1 典型地物异质性计算结果
Table 1 The results of typical targets heterogeneity
| 典型地物 | 最小值 | 最大值 | 均值 | 标准差 |
| 点1 | 11.703 | 16.557 | 14.135 | 1.552 |
| 点2 | 6.795 | 8.395 | 7.266 | 0.425 |
| 边缘1 | 16.593 | 19.727 | 18.428 | 1.137 |
| 边缘2 | 11.196 | 14.906 | 12.394 | 1.015 |
| 城区1 | 4.506 | 12.312 | 8.081 | 1.618 |
| 城区2 | 5.648 | 9.583 | 7.378 | 0.854 |
| 林地1 | 3.129 | 5.518 | 4.270 | 0.625 |
| 林地2 | 3.196 | 5.952 | 4.485 | 0.574 |
| 农田1 | 2.874 | 4.187 | 3.557 | 0.393 |
| 农田2 | 3.247 | 4.731 | 4.000 | 0.388 |
从表1中可以看出,不同的地物类型,其异质性I值不同。点和边缘的异质性具有很高的异质性,I值基本上都在8.3以上,而林地和农田的最大I值在6.0以下,异质性明显偏低,而城区地物复杂,通常被认为是极端异质区,异质性偏高,但大部分I值处在8.0以下,因此该实验图像的阈值Imax选定为8.0。
4.2 相干斑抑制和细节信息保持效果分析
为了验证滤波效果,本文通过目视对比和定量评价,从相干斑抑制、细节信息和极化信息保持性几个方面进行分析。
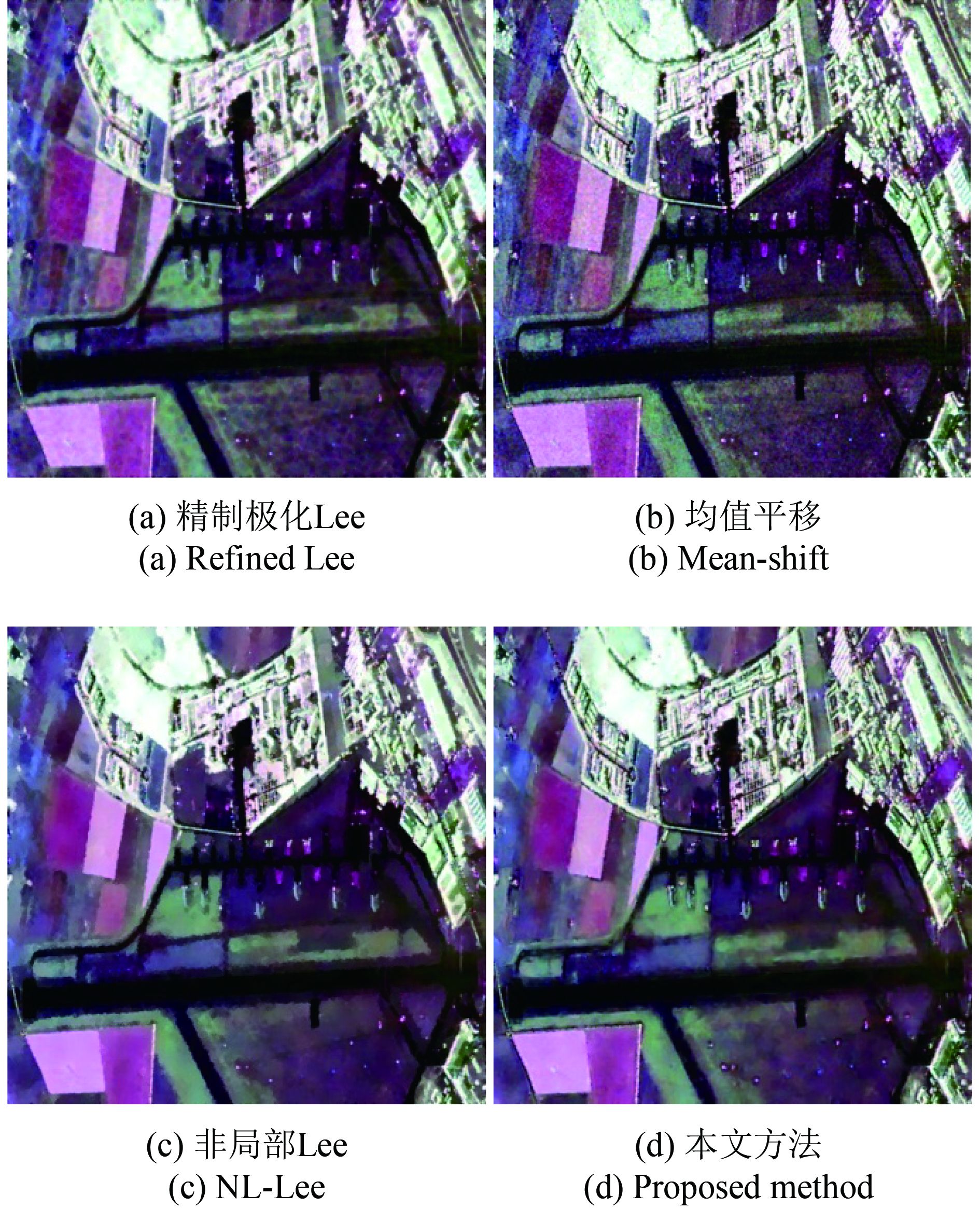
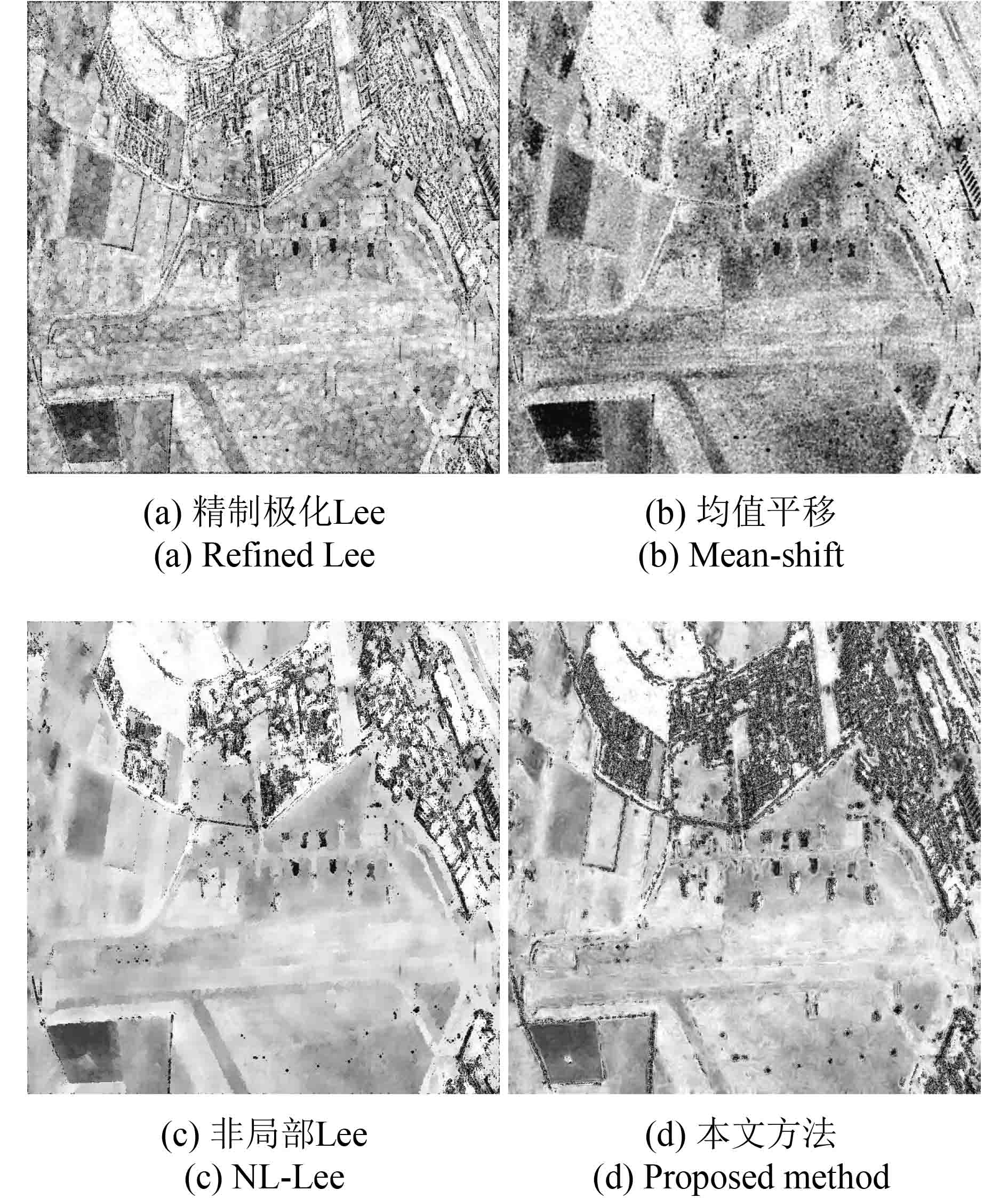
实验将Refined Lee滤波、Mean-shift算法(Lang 等,2014)、NL-Lee算法(Zhong 等,2014)和本文所提滤波方法进行对比分析。其中,Refined Lee和Mean-shift算法是局部滤波算法,滤波窗口大小分别选取为7×7和11×11,非局部滤波的NL-Lee算法和本文方法的搜索窗口大小选取为21×21,图像块为7×7。NL-Lee算法的阈值系数设置为20,本文方法的平滑控制参数h通常是
为了更清晰的从目视角度观察图像的边缘目标信息,实验截取了总功率SAPN图像的部分区域进行了放大,局部放大图如图4所示。

由图3可以看出,在跑道、田块等均质区域,图3(c) NL-Lee算法和图3(d)本文方法的相干斑抑制效果要好于图3(a)、(b)局部滤波的图像。在图4的SPAN局部放大图中,图4(b)Mean-shift算法和(d)本文方法的边缘明显比图4(a)、(c)更清晰,边缘信息保持性要好于图4(a)和图4(c)。
为了进一步定量评价不同滤波算法的相干斑抑制效果,采用常用的等效视数(ENL)(王超 等,2008;Foucher和Lopez-Martinez,2014)作为评价指标,分别在各滤波结果SPAN图像中选取两块均质区域如图1中的区域Z1、Z2,计算其等效视数,结果如表2所示。由于等效视数越大,表明图像上的相干斑越弱,抑制效果越好,从表2中可以看出,等效视数都大于原图像,4种算法都具有一定的滤波效果,而且NL-Lee算法和本文方法要明显高于两种局部滤波算法,相干斑抑制性具有比较大的优势。
表 2 等效视数(ENL)和边缘保持指数(EPI)
Table 2 Equivalent number of looks(ENL) and edge preserving index(EPI)
| 方法 | 原图像 | RefinedLee | Meanshift | NL-Lee | 本文算法 | |
| Z1 | ENL | 3.663 | 32.40 | 27.32 | 183.8 | 209.4 |
| Z2 | 4 | 36 | 36 | 36 | 49 | |
| Z3 | EPI | 1 | 0.7137 | 0.7360 | 0.8948 | 0.9886 |
| Z4 | 1 | 0.6278 | 0.4943 | 0.4912 | 0.8916 | |
边缘细节信息的保持性用边缘保持指数(EPI)来定量分析,原始数据的EPI值是1,EPI值越接近1,代表滤波后图像的边缘保持效果越好。如图1中的Z3、Z4区域,分别在各滤波结果SPAN图像中选取这两块异质区域的像元计算边缘保持指数EPI,结果如表2所示。由于本文方法对高异性的点、线目标进行了保留,表2中本文方法的EPI值更接近于1,边缘细节信息保持效果明显好于其他3种算法。
详细对比可以发现,虽然NL-Lee算法整体滤波效果优于Refined Lee和Mean shift算法,但在区域4,Refined Lee、Mean shift滤波方法的EPI还要略高于NL-Lee算法,而本文方法的相干斑抑制效果和边缘结构信息的保持性都要更优于其他3种算法。定量对比结果与目视分析基本一致,进一步证明本文方法具有更好地相干斑抑制和细节信息保留能力。
4.3 极化信息保持效果分析
极化散射信息也可以从定性和定量两方面进行分析,实验用
极化功率变化量(PRC)是对极化信息保持性的定量分析指标,该指标先计算不同极化功率占总功率的百分比,然后对比经过不同算法滤波处理的结果与原图像的差异,差异越大,表明极化信息保持性越弱,反之,则保持性越好(肖世忱 等,2015;邓少平 等,2011),结果如表3所示。从表中能够看出,3种方法的极化信息保持性明显好于Refined Lee滤波算法,而且本文方法的极化信息保持性好于NL-Lee算法。
表 3 极化信息保持性
Table 3 Polarization information preservation
| /(%) | |||||
| 原图 | Refined Lee | Mean shift | NL-Lee | 本文算法 | |
| P(HH) | 49.45 | 41.01 | 48.6 | 49.25 | 49.44 |
| P(HV) | 37.94 | 31.54 | 36.58 | 37.65 | 37.96 |
| P(VV) | 12.61 | 10.7 | 11.97 | 12.64 | 12.61 |
| PRC | 0 | 16.75 | 2.85 | 0.52 | 0.03 |
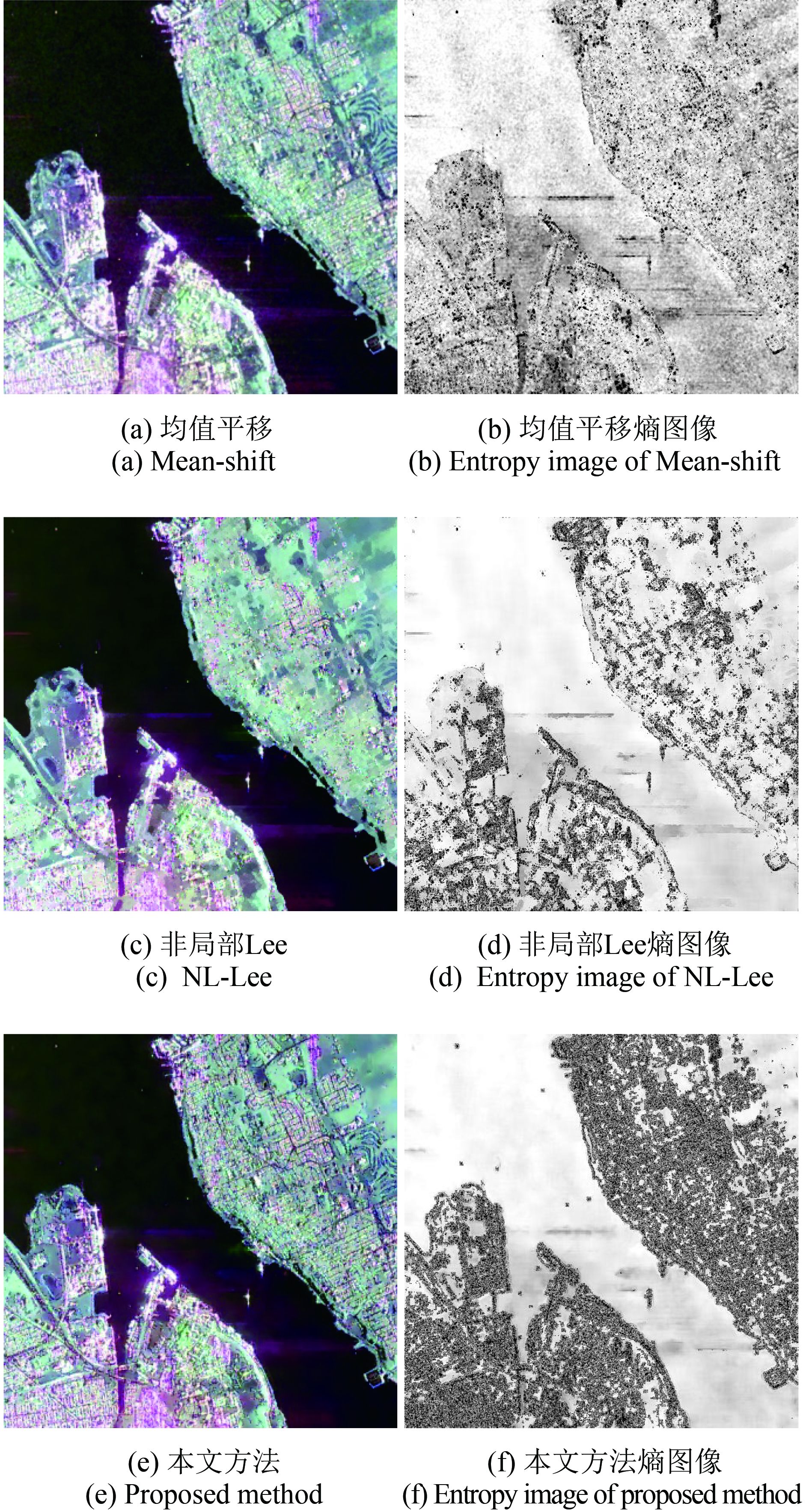
为了验证本文方法对其他极化图像的适用性,选取加拿大魁北克地区星载RADARSAT-2系统C波段2×2视数据进行实验,分别用Mean-shift算法、NL-Lee算法和本文方法对该数据滤波,NL-Lee算法的阈值系数为15,根据表4中典型地物的异质性值,本文算法的Imax选取为6,参数m为4。
表 4 RADARSAT-2地物异质性计算结果
Table 4 The results of RADARSAT-2 typical targets heterogeneity
| 典型地物 | 最小值 | 最大值 | 均值 | 标准差 |
| 点 | 6.036 | 6.750 | 6.453 | 0.207 |
| 边缘 | 18.648 | 20.847 | 19.893 | 0.634 |
| 城区 | 5.500 | 10.697 | 7.959 | 1.449 |
| 水域 | 2.261 | 4.044 | 2.971 | 0.507 |
之后分别对滤波结果进行
为了与基于全变差的非局部均值WisNLTV算法 (Nie 等,2016)进行对比,实验同样采用AIRSAR系统获取的4视旧金山湾地区数据进行实验。
在AIRSAR图像中选取的典型地物样本异质性I值如表5所示,根据表中计算结果,本文方法的Imax选取为6,参数m为1.4,实验结果如图7所示。
表 5 AIRSAR地物异质性计算结果
Table 5 The results of AIRSAR typical targets heterogeneity
| 典型地物 | 最小值 | 最大值 | 均值 | 标准差 |
| 点 | 5.752 | 7.406 | 6.374 | 0.618 |
| 边缘 | 11.131 | 12.351 | 11.626 | 0.426 |
| 林地 | 2.375 | 4.709 | 3.627 | 0.739 |
| 建筑区 | 5.062 | 7.722 | 6.104 | 0.622 |
| 海洋区域 | 1.544 | 3.119 | 2.156 | 0.415 |
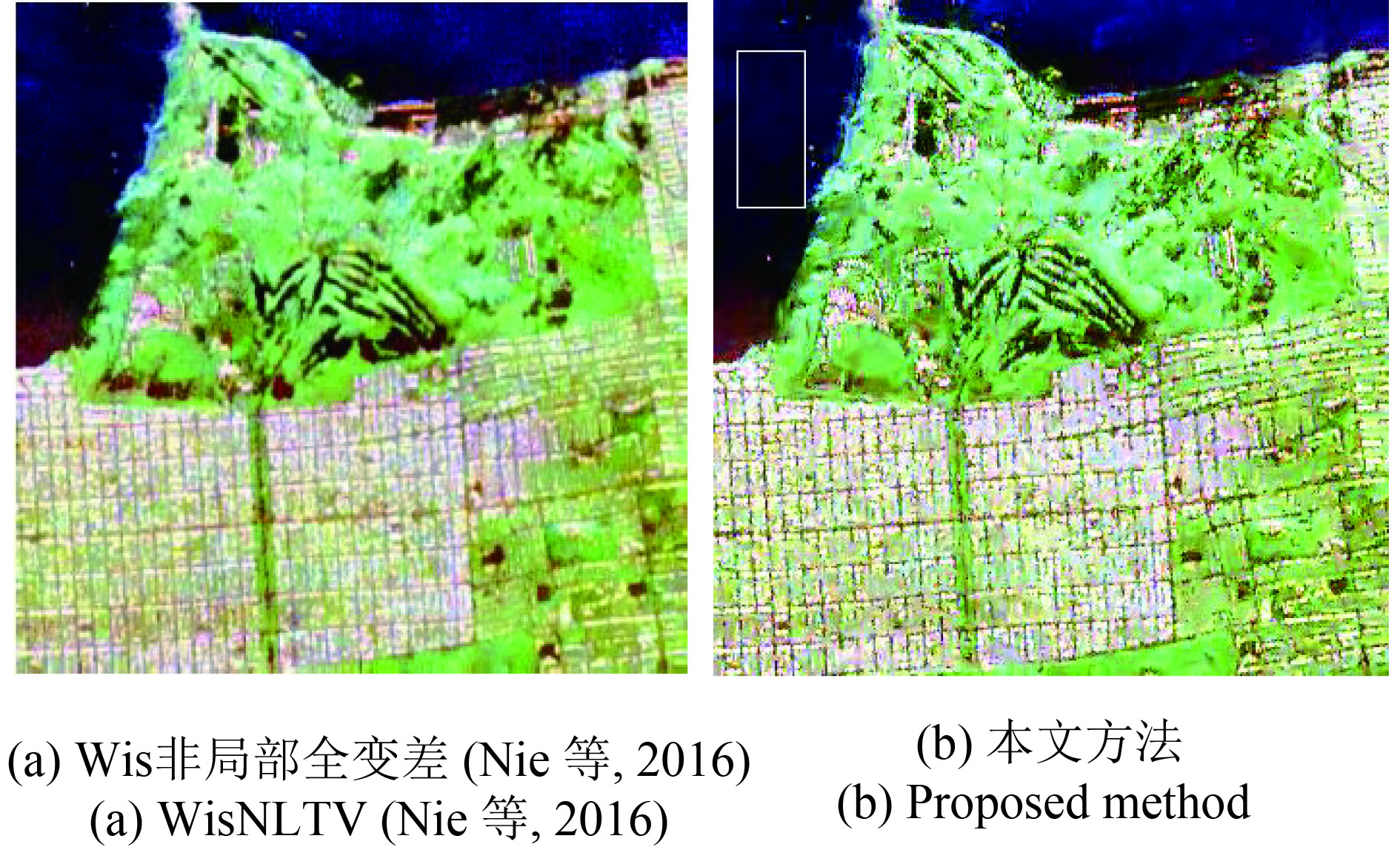
定量评价中,实验选取图7(b)中的白色区域,分别计算3个通道的等效视数(ENL),并计算水平和垂直方向的边缘保持指数(EPI),如表6所示。从表中可以看出,本文方法与WisNLTV算法相比,相干斑平滑效果优势明显,很好地保留了边缘信息。
表 6 等效视数和边缘保持结果
Table 6 Equivalent number of looks(ENL) and edge preserving index(EPI) of AIRSAR
| ENL | EPI HD | EPI VD | |||||||||
| 方法 | HH | HV | VV | HH | HV | VV | HH | HV | VV | ||
| Wis-NLTV | 9.18 | 29.23 | 11.31 | 0.70 | 0.76 | 0.70 | 0.76 | 0.81 | 0.77 | ||
| 本文方法 | 35.32 | 63.94 | 37.97 | 0.82 | 0.80 | 0.72 | 0.75 | 0.81 | 0.78 | ||
5 结 论
本文提出的顾及目标异质性的极化SAR图像非局部均值滤波方法,基于像元间K分布距离的波动性保留图像中的点、线等高异质性目标,避免了在相似性结构较少的区域丢失边缘细节;将异质性差异作为非局部均值滤波像元相似性的加权系数,结合目标的异质性与结构信息,能对不同异质性区域进行不同程度的滤波。对比实验结果表明本文方法不仅能够有效抑制相干斑,还能很好地保持目标的结构信息和极化信息。当然,该方法对于异质度阈值有一定的依赖,如何尽量避免这种硬划分对结果的影响是下一步要研究的内容。
参考文献(References)
-
Buades A, Coll B and Morel J M. 2005. A non-local algorithm for image denoising //Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Diego, CA, USA: IEEE, 2: 60–65 [DOI: 10.1109/CVPR.2005.38]
-
Chen J, Chen Y L, An W T, Cui Y and Yang J. 2011. Nonlocal filtering for polarimetric SAR data: a pretest approach. IEEE Transactions on Geoscience and Remote Sensing, 49 (5): 1744–1754. [DOI: 10.1109/TGRS.2010.2087763]
-
Chen J H, Zhao Y J, Shi Y S and Liu W. 2015. Fast bayesian non-local means of polarimetric SAR image despeckling. Journal of Xidian University, 42 (3): 148–153, 204. [DOI: 10.3969/j.issn.1001-2400.2015.03.025] ( 陈建宏, 赵拥军, 时银水, 刘伟. 2015. PolSAR快速贝叶斯非局部均值相干斑抑制方法. 西安电子科技大学学报(自然科学版), 42 (3): 148–153, 204. [DOI: 10.3969/j.issn.1001-2400.2015.03.025] )
-
Deledalle C A, Denis L and Tupin F. 2009. Iterative weighted maximum likelihood denoising with probabilistic patch-based weights. IEEE Transactions on Image Processing, 18 (12): 2661–2672. [DOI: 10.1109/TIP.2009.2029593]
-
Deledalle C A, Denis L, Tupin F, Reigber A and Jager M. 2015. NL-SAR: a unified non-local framework for resolution-preserving (Pol)(In)SAR denoising. IEEE Transactions on Geoscience and Remote Sensing, 53 (4): 2021–2038. [DOI: 10.1109/TGRS.2014.2352555]
-
Deng S P, Li P X, Zhang J X and Huang G M. 2011. Filtering of polarimetric SAR imagery based on multiplicative model. Geomatics and Information Science of Wuhan University, 36 (10): 1168–1171. ( 邓少平, 李平湘, 张继贤, 黄国满. 2011. 基于乘积模型的极化SAR滤波. 武汉大学学报(信息科学版), 36 (10): 1168–1171. )
-
Foucher S and Lopez-Martinez C. 2014. Analysis, evaluation, and comparison of polarimetric SAR speckle filtering techniques. IEEE Transactions on Image Processing, 23 (4): 1751–1764. [DOI: 10.1109/TIP.2014.2307437]
-
Lang F K, Yang J, Li D R, Shi L and Wei J J. 2014. Mean-shift-based speckle filtering of polarimetric SAR data. IEEE Transactions on Geoscience and Remote Sensing, 52 (7): 4440–4454. [DOI: 10.1109/TGRS.2013.2282036]
-
Lang F K, Yang J and Li D R. 2015. Adaptive-window polarimetric SAR image speckle filtering based on a homogeneity measurement. IEEE Transactions on Geoscience and Remote Sensing, 53 (10): 5435–5446. [DOI: 10.1109/TGRS.2015.2422737]
-
Lee J S, Hoppel K and Mango S A. 1992. Unsupervised estimation of speckle noise in radar images. International Journal of Imaging Systems and Technology, 4 (4): 298–305. [DOI: 10.1002/ima.1850040409]
-
Lee J S, Grunes M R and Kwok R. 1994. Classification of multi-look polarimetric SAR imagery based on complex Wishart distribution. International Journal of Remote Sensing, 15 (11): 2299–2311. [DOI: 10.1080/01431169408954244]
-
Lee J S, Grunes M R and de Grandi G. 1999. Polarimetric SAR speckle filtering and its implication for classification. IEEE Transactions on Geoscience and Remote Sensing, 37 (5): 2363–2373. [DOI: 10.1109/36.789635]
-
Lee J S and Pottier E. 2009. Polarimetric Radar Imaging: from Basics to Applications. Boca Raton: CRC Press of Taylor & Francis Group: 232-246.]
-
Lee J S, Ainsworth T L, Wang Y T and Chen K S. 2015. Polarimetric SAR speckle filtering and the extended sigma filter. IEEE Transactions on Geoscience and Remote Sensing, 53 (3): 1150–1160. [DOI: 10.1109/TGRS.2014.2335114]
-
Li H C, Hong W, Wu Y R and Fan P Z. 2013. Bayesian wavelet shrinkage with heterogeneity-adaptive threshold for SAR image despeckling based on generalized gamma distribution. IEEE Transactions on Geoscience and Remote Sensing, 51 (4): 2388–2402. [DOI: 10.1109/TGRS.2012.2211366]
-
Liu G C and Zhong H. 2014. Nonlocal means filter for polarimetric SAR data despeckling based on discriminative similarity measure. IEEE Geoscience and Remote Sensing Letters, 11 (2): 514–518. [DOI: 10.1109/LGRS.2013.2271321]
-
Lopes A, Touzi R and Nezry E. 1990. Adaptive speckle filters and scene heterogeneity. IEEE Transactions on Geoscience and Remote Sensing, 28 (6): 992–1000. [DOI: 10.1109/36.62623]
-
Ma X S, Shen H F, Yang J and Zhang L P. 2015. Polarimetric SAR speckle filtering using a nonlocal weighted minimum mean squared error filter. Journal of Image and Graphics, 20 (1): 140–150. [DOI: 10.11834/jig.20150115] ( 马晓双, 沈焕锋, 杨杰, 张良培. 2015. 极化SAR相干斑抑制的非局部加权最小均方误差滤波算法. 中国图象图形学报, 20 (1): 140–150. [DOI: 10.11834/jig.20150115] )
-
Ma X S, Shen H F, Zhang L P, Yang J and Zhang H Y. 2015. Adaptive anisotropic diffusion method for polarimetric SAR speckle filtering. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 8 (3): 1041–1050. [DOI: 10.1109/JSTARS.2014.2328332]
-
Nie X L, Qiao H and Zhang B. 2015. A variational model for PolSAR data speckle reduction based on the wishart distribution. IEEE Transactions on Image Processing, 24 (4): 1209–1222. [DOI: 10.1109/TIP.2015.2396292]
-
Nie X L, Qiao H, Zhang B and Huang X Y. 2016. A nonlocal TV-based variational method for PolSAR data speckle reduction. IEEE Transactions on Image Processing, 25 (6): 2620–2634. [DOI: 10.1109/TIP.2016.2552402]
-
Novak L M and Burl M C. 1990. Optimal speckle reduction in polarimetric SAR imagery. IEEE Transactions on Aerospace and Electronic Systems, 26 (2): 293–305. [DOI: 10.1109/7.53442]
-
Torres L, Sant’Anna S J S, da Costa Freitas C and Frery A C. 2014. Speckle reduction in polarimetric SAR imagery with stochastic distances and nonlocal means. Pattern Recognition, 47 (1): 141–157. [DOI: 10.1016/j.patcog.2013.04.001]
-
Vasile G, Trouve E, Lee J S and Buzuloiu V. 2006. Intensity-driven adaptive-neighborhood technique for polarimetric and interferometric SAR parameters estimation. IEEE Transactions on Geoscience and Remote Sensing, 44 (6): 1609–1621. [DOI: 10.1109/TGRS.2005.864142]
-
Wang C, Zhang H, Chen X, Liu Z and Yan D M. 2008. Fully Polarimetric Synthetic Aperture Radar Image Processing. Beijing: Science Press: 68–69 (王超, 张红, 陈曦, 刘智, 闫冬梅. 2008. 全极化合成孔径雷达图像处理. 北京: 科学出版社: 68–69)
-
Xiao S C, Liao J J and Shen G Z. 2015. Speckle filtering for polarimetric SAR data based on self-cross bilateral filter. Journal of Remote Sensing, 19 (3): 400–408. [DOI: 10.11834/jrs.20154117] ( 肖世忱, 廖静娟, 沈国状. 2015. 自交叉双边滤波的极化SAR数据相干斑抑制. 遥感学报, 19 (3): 400–408. [DOI: 10.11834/jrs.20154117] )
-
Yang X Z, Zuo M X, Lang W H, Zhang X and Meng J M. 2012. Speckle reduction for multi-polarimetric SAR image with the similarity of the scattering. Journal of Remote Sensing, 16 (1): 105–115. [DOI: 10.11834/jrs.20120404] ( 杨学志, 左美霞, 郎文辉, 张晰, 孟俊敏. 2012. 采用散射特征相似性的极化SAR图像相干斑抑制. 遥感学报, 16 (1): 105–115. [DOI: 10.11834/jrs.20120404] )
-
Zhong H, Zhang J J and Liu G C. 2014. Robust polarimetric SAR despeckling based on nonlocal means and distributed lee filter. IEEE Transactions on Geoscience and Remote Sensing, 52 (7): 4198–4210. [DOI: 10.1109/TGRS.2013.2280278]


