

|
收稿日期: 2015-12-08; 优先数字出版日期: 2016-11-25
基金项目: 国家自然科学基金(编号:41301199)
第一作者简介: 吕明明(1992—),男,硕士研究生,研究方向为城市区域大气气溶胶遥感反演研究。E-mail:
lvming@cugb.edu.cn
通讯作者简介: 韩立建(1981—),男,副研究员,研究方向为城市化的生态环境效应研究。E-mail:
ljhan@rcees.ac.cn
中图分类号: TP79
文献标识码: A
|
摘要
云覆盖作为天气和气候变化的一个重要因子,对地表-大气能量平衡和水循环有着重要的影响,因此,快速、准确地利用卫星遥感技术检测云覆盖具有重要的实用价值和科学意义。利用卫星遥感数据,尤其是常用的 Moderate Resolution Imaging Spectroradiometer (MODIS)影像数据,因其具有较高的光谱和时间分辨率,以及2330 km扫描幅宽,为大范围实时、准确地进行云检测提供了可能。目前,基于MODIS数据发展了大量的云检测方法,但因地表类型的多样性和大气状况(如空气污染和沙尘事件等)的复杂性,目前已有的云检测方法,检测精度通常具有较大的不确定性,且针对不同地表和大气状况缺乏普适性,同时也缺乏对检测精度的定量化评估。因此,本文首先比较了常用的3种云检测算法,并基于前人经验提出了两种改进方法(方法4和方法5),首先区分出云和冰雹,摒弃了不稳定的亮温波段,两种算法均适用于复杂地表和大气状况的云检测算法。结果显示,方法5可以较好地应用于基于MODIS数据的云检测,总体精度达92.6±7%,改进了现有基于MODIS数据的云检测算法;方法4平均总体精度82.9±13%,虽然精度相对较低,但云残留少,适合作为对云敏感度高的研究工作的云检测方法。
关键词
云检测 , MODIS影像数据 , 不确定性 , 地球表层系统
Abstract
Clouds cover approximately 70% of the Earth’s surface. They can balance energy and water cycles, so they are considered one of the most important parameters in the Earth’s surface system. Remote sensing provides a rapid yet efficient cloud detection approach, especially through moderate-resolution imaging spectro radiometer (MODIS) imagery that has been scanning the Earth’s surface at a large scale, with a reasonable 0.25 km to 1km spatial resolution, more than once a day since 1999.The use of remote sensing for cloud detection has long been considered a simple issue because of the significant difference among cloud spectrums and other surfaces or atmospheric conditions. However, its instability is due to the complexity of cloud types, seasonal surface changes, and varied atmospheric conditions. Thus, this research aims (1) to compare typical cloud detection methods, and (2) propose and validate improved methods based on the previous ones. We selected an area in East China with complex surface and atmospheric conditions (e.g., aerosol pollution, Asian dust, and snow cover) as the study area, and obtained nine MODIS L1B products on typical seasons in the study areas for a cloud detection experiment. Typical spectral signatures of cloud, high reflectance in visible bands, and low-bright temperatures in infrared bands are commonly used for cloud detection; however, their results remain uncertain because of varied surfaces and atmospheric conditions. Thus, we compared three commonly used cloud detection methods, abandoned unstable infrared bands, and considered snow detection, from which we proposed two improved methods. The proposed methods improved the previous ones as results showed high and stable overall accuracy. One of our proposed methods obtained the best overall accuracy of 92.6±7%, and the average mapping accuracy of cloud area and no-cloud area was at 95.8% and 88.2%, respectively; the other method had a low overall accuracy of 82.9±13%, which was similar to the rest of the methods, but could detect almost all cloudy pixels. The proposed methods also widened the applicability of MODIS imagery under complex Earth surface and atmospheric conditions as results found that snow, air pollution, and Asian dust could be better distinguished from clouds by using the two methods based on MODIS data, except under some extremely heavy dust conditions. The two proposed cloud detection methods have different applicability in research. One obtained high and stable detection accuracy (92.6±7%); while the other achieved a relative low-detection accuracy, but detects most cloud cover information, which is suitable to remote sensing research with high sensitivity to cloud errors. Our proposed methods improved cloud detecting ability under complex ground and atmospheric conditions.
Key words
cloud detection , MODIS image data , detection uncertainty , earth surface system
1 引 言
国际卫星云气候计划ISCCP(International Satellite Cloud Climatology Project)统计的1983年—2009年全球云量数据( http://isccp.giss.nasa.gov/ climanal1.html)显示,云覆盖了全球大约66.7%的地表。云通过对太阳辐射(反射、透射、吸收等作用)和降雨的影响,在大气辐射能量平衡和水循环中起着至关重要的作用,是天气和气候变化的一个极为重要的影响因子( Stubenrauch 等,2013; 向华 等,2014; 张小曳 等,2014)。同时,云也是遥感反演大气及地表各种信息的重要参数之一( 何全军 等,2006; 康晓光和孙龙祥,2005)。相比传统地面测量的方法,利用遥感技术进行全覆盖的云检测更为高效准确。由于云与地表要素的显著光谱差异,通常利用云在可见光波段的高反射率和亮温波段的低亮温值来区别云与其他地物。一般认为,基于遥感的云检测方法较为简单,很多研究者都在各自研究区获得较好的检测效果( 盛夏 等,2004; 何全军 等,2006; Wong 等,2010),但是精确获取仍具有较大的不确定性,因此基于遥感的云检测方法尚有待进一步提高。
卫星遥感技术的快速进步为云检测提供了多种分辨率的遥感数据。以陆地卫星系列(Landsat)为代表的中分辨率遥感数据,空间分辨率较高,可以用来检测卫星过境时间特定范围的云覆盖。以AVHRR和风云气象卫星等为代表的中低空间分辨率遥感数据,虽然回访周期短,但是波段数较少,云检测的精度相对较低。1999年以来,Terra和Aqua卫星获取的MODIS数据因其较高的光谱分辨率,较大的扫描幅宽和同一地区每天至少一次的数据获取能力,以及完备的数据预处理和免费获取而被广泛使用,为云检测研究提供了快速且稳定的数据源。
由于云的时空分布、高度、厚度和组成种类的不确定性,以及与复杂地表类型和大气状态的复合,导致云影像特征的的不确定性,因此针对遥感影像的云检测发展了大量的方法,如分形纹理法( Kittler和Pairman,1985)、神经网络法( Bankert,1994)、聚类法( Porcú和Levizzani,1992)、物理阈值法( Saunders和Kriebel,1988; Rossow,1989)等,其中物理阈值法因其简单高效而应用最为广泛。 盛夏等人(2004)利用MODIS可见光波段反射率和红外波段辐射亮温,设置阈值进行云检测,该算法能够较好地检测云,但对于不同地表类型适用性较差。 何全军等人(2006)利用相同的MODIS波段对其进行改进,重新组合波段、设置阈值,改进的算法对云信息提取完整,应用较成熟,但仍有较多云像元残留。 Wong等人(2010)利用MODIS红、绿、蓝3个波段和归一化植被指数(NDVI)来检测云,该方法较为保守,残留的云像元较多,且不适用于亮地表。Levy等人(2009)在MOD04气溶胶基础算法文档(C005和C051,2009)中提出用云在MODIS 0.47 μm、1.38 μm波段的空间差异性以及反射率来检测云,该算法对云敏感,但较易将无云的亮地表误判为云。
云检测作为遥感影像预处理工作的一个必要环节,其算法也在逐渐接近成熟,但精确地进行云检测仍是遥感处理与分析的一个较易忽略的方面。由于大多数研究者(盛夏 等,2004;何全军 等,2006;Wong 等,2010)都是选用某一特定研究区进行云检测,因此对于不同地表类型和大气状况缺乏普适性,同时部分研究者只是将原始影像和提取的云信息进行对比,缺乏检测精度的定量化评估。因此,本研究选取MODIS L1B数据产品,综合比较常用云检测算法在复杂地表类型和大气状况下的适用性,并基于此提出改进方法。
2 研究区、数据和方法
2.1 研究区
研究选取中国东部为案例区,该区( 图1)所包括的中国东部地区,以季风气候为主,四季差异显著;土地覆盖类型复杂,包括林地、草地、耕地、城市建设用地、水体、未利用地和季节性雪地等;大气状态复杂,云覆盖类型多样,有层云、卷云和积云。该区空气污染严重,经常伴有气溶胶等污染物出现(Han 等,2015),同时该区冬春季节较易受到东亚沙尘天气影响(Han 等,2013)。该区地表类型多样、大气状态复杂,因此选做试验区,通过对已有云检测方法的对比分析,提出基于MODIS遥感影像的改进云检测算法。


2.2 MODIS L1B数据
MODIS是NASA对地观测系统的一个重要工具,它拥有36个光谱波段,包括20个太阳光反射波段(reflective solar bands)(1—19和26波段)和16个热辐射波段(20—25和27—36波段),波段范围0.41—14.5 μm,空间分辨率包括250 μm(1—2波段)、500 μm(3—7波段)和1 km(8—36波段),扫描幅宽为2330 km,每日同一地区可获得昼夜四次数据,且具有高信噪比,能满足海洋、陆地和大气的各种观测需求( Xiong 等,2013)。MODIS的高光谱分辨率、中低空间分辨率、高时间分辨率和较大的扫描幅宽等特点为实时、大范围、高精度的云检测提供了可能。本研究选取了春夏秋冬各两幅典型的MODIS L1B影像数据及一幅沙尘过程的MODIS L1B影像数据( 表1),以涵盖复杂的地表覆盖类型和大气状况,便于比较不同的云检测方法,并提出改进方法。
表 1 所选影像数据概况
Table 1 List of selected MODIS images
| 时间 | 涵盖地表类型 | 涵盖大气状况 | |
| 冬季 | 2013年1月3日 | 林、草、耕、雪、水、建筑用地、未利用地 | 卷云、层云 |
| 2013年1月9日 | |||
| 春季 | 2007年3月30日 | 林、草、雪、未利用地 | 卷云、层云、沙尘 |
| 2013年3月7日 | 林、草、耕、雪、水、建筑用地 | 卷云、层云、积云、空气污染 | |
| 2013年3月14日 | 林、草、耕、雪、水、建筑用地 | 卷云、层云、积云、空气污染 | |
| 夏季 | 2013年7月1日 | 林、草、耕、水、建筑用地、未利用地 | 卷云、层云、积云 |
| 2013年7月4日 | |||
| 秋季 | 2013年9月14日 | 林、草、耕、水、建筑用地、未利用地 | 卷云、层云、积云 |
| 2013年9月16日 |
2.3 方法
2.3.1 MODIS常用的云检测波段
云检测的原理是利用云在可见光和红外波段与植被、土壤、雪和水体等下垫面存在不同反射率和辐射亮温值进行检测的。在可见光波段,较厚的云体反射太阳辐射的能力很强,有较高的反射率;在热红外波段,云的亮温一般小于地表,具有较小的亮温值,因此常利用这些特性区分云和晴空。但由于地表类型复杂多样,通常需要多个波段进行组合来识别云,常用的云检测波段及云识别特点如 表2所示。
表 2 云检测常用波段及云识别特点
Table 2 The commonly used bands for cloud detection and cloud characteristics
| 波段 | 云在各波段的识别特点 |
| 可见光波段(0.38—0.78 μm) | 具有高反射率,一般高于其他下垫面介质,但与雪地难以区分 |
| 1.38 μm波段 | 对高层卷云敏感,但在地势较高或地表上空水汽含量较少地区会发生误判 |
| 0.66 μm和1.64 μm波段 | 常用( B0.66- B1.64)/( B0.66+ B1.64)来区分云和雪,但可能会将其他地物误判为云,一般与0.412 μm波段组合防止误判( B表示波段反射率) |
| 8.6 μm和11 μm波段 | 在云区亮温差为正值,在无云区为负值,但会受水汽含量影响,并且对于光学厚度较大的水云,亮温差会小于-2 K |
| 11 μm、3.7 μm和12 μm波段 | 11 μm与3.7 μm或12 μm波段亮温差常用来识别卷云,但随季节的变化,阈值也需要进行相应的调整 |
2.3.2 基于MODIS的改进的云检测方法
由于云与雪在可见光波段具有相似的光谱特性,在云检测中经常会把云和雪一同提取出来,从而影响云检测的精度,因此,可以先把雪分离出来,然后进行云检测以提高检测精度。短波红外波段(如MODIS波段6和波段7)对于云和雪具有较好的区分效果,经常用归一化雪指数(NDSI)来区分冰雪和大部分卷云( Hall 等,2001)。对于MODIS Terra,NDSI的计算公式为
| $ {\rm{NDSI}} = \left( {{B_4} - {B_6}} \right)/\left( {{B_4} + {B_6}} \right) $ | ((1)) |
式中, B i 表示MODIS第 i波段反射率。
由于MODIS Aqua的波段6只有大约30%运行正常( Hall 等,2001),因此NDSI的计算公式中的第6波段被第7波段代替
| $ {\rm{NDSI}} = \left( {{B_4} - {B_7}} \right)/\left( {{B_4} + {B_7}} \right) $ | (2) |
同时还需要与波段1和波段2组合来区分云和雪,算法较为复杂。为了使算法更加简便,本研究使用( B 2- B 5)/( B 2+ B 5)( Li 等,2005)与波段7和波段26进行组合来检测雪。对于云的检测,则主要根据云的高反射率值,使用波段3、8和26进行检测。由于云的亮温阈值在不同的季节需要调整,过于繁琐,因此在算法中没有使用亮温波段进行云检测。为了尽可能地减少云残留,本研究又根据云的空间差异性,使用波段3和波段26组合进行云检测,虽然云残留少,但是会把部分无云地表误判为云。薄云和低云与地表的亮度对比度很低,减少云残留必然会把无云地表误判为云,因此在方法4的基础上提出了方法5,尽可能减少云残留和对无云地表的误判。对于各波段阈值的选取,本研究依据前人研究算法,经过大量实验,通过目视解译对比实验结果,得出合适的阈值。对比的3种常用算法和改进的两种算法如 表3所示。
表 3 本研究所对比的云检测算法及提出的云检测改进算法
Table 3 The compared and proposed cloud detection algorithms with MODIS image
| 算法 | 特点 | ||
| 常用算法 | 方法1 (何全军 等,2006) | B 1 >0.3→云 B 26 >0.008和BTD (29,31) >-0.012→云 B 26 >0.02和 B 1 <0.2→云 B 26 <0.02和 B 1 >0.2→云 B 8 >0.17和-0.0009<B (1,6) <0.002 and B 1 >0.2→云 | 能够完整提取云信息,但可见光阈值的设定会把高反射率地表误判为云,亮温波段检测对于不同的季节气候会有较大偏差 |
| 方法2 (Wong 等,2010) | B 3 >0.2→云 B 4 >0.2→云 B 1 >0.2→云 NDVI<-0.5→水 | 算法简单快速,能提取出大部分云,不适用于复杂地表类型 | |
| 方法3( Levy 等,2009 ) | Stdv( B 3 )>0.0025→云 Stdv( B 26 )>0.003→云 B 3 >0.4→云 B 26 >0.025→云 | 适用于各种地表类型,对云敏感,但会把较多无云地表误判为云 | |
| 改进算法 | 方法4 | B (2,5) <0.15和 B 7 <0.05和 B 26 <0.05→冰雪 B 3 >0.2→云 B 26 <0.02 and B 8 >0.17→云 Stdv( B 3 )>0.003 and B 3 >0.1 and B 26 >0.01→云 | 考虑了复杂地表类型和大气状况,云残留少,但会有无云地表被误判为云 |
| 方法5 | B (2,5) <0.15和 B 7 <0.05和 B 26 <0.05→冰雪 B 3 >0.2→云 B 26 <0.02和 B 8 >0.17→云 | 考虑了复杂地表类型和大气状况,云信息提取完整,但会有较少云残留 | |
| 注: B i 代表MODIS第 i 波段反射率, B ( i , j ) 表示( B i - B j )/( B i + B j ),BTD ( i , j ) 表示MODIS第 i 和 j 波段的亮温差,Stdv表示3×3窗口像元值的标准差。 | |||
2.3.3 精度检验
云检测精度的验证通常是从定性的角度,通过对比原始影像和提取出的云信息来进行评估。为准确对比不同方法的精度,本研究也从定量的角度,采用像元精度和总体分类精度两个指标来评估云检测的精度。像元精度( P a )和总体分类精度( P t )的计算公式分别为
| $ {P_a} = \mathop \sum \nolimits {S_{kk}}/\mathop \sum \nolimits {R_k}和{P_t} = \mathop \sum \nolimits {S_k}/\mathop \sum \nolimits {R_k} $ | (3) |
式中, S kk 表示分类结果中 k地物与参考影像中 k地物位置一致的像元, S k 表示分类影像中 k地物的像元, R k 表示参考影像中 k地物的像元。因此本研究在所选的9幅典型影像中,每幅影像随机选取3块面积约1万平方公里的样区(约100×100像元),将通过目视解译提取的结果作为参考分类,计算每块样区5种方法云检测结果的像元精度和总体分类精度,进而计算每种方法27块样区提取结果的平均像元精度和平均总体分类精度以及标准差,以定量评估5种方法的云检测精度以及方法的稳定性。
3 结果和讨论

从5种算法的精度对比结果来看,已有的常用算法对于复杂的地表类型和大气状况的研究区云检测精度较低。方法5的平均总体分类精度最高,为92.6%,无云和有云区的平均像元精度也较高,分别达到95.8%和88.2%,方法3的平均总体分类精度最低,仅为74.6%,主要原因系无云区较低的检测精度(无云区像元精度58.2%)。方法1、方法2和方法4的平均总体分类精度较为接近,均达到83%左右的水平,但方法4的有云区检测精度较高,达到了98.7%。
精度检验的标准差反映了每种云检测方法的稳定性,其中方法5的标准差最低(7%),稳定性最高,方法1的标准差最高(19%),稳定性最差。从有云区的像元精度上看,方法3和方法4的标准差最低(2%),稳定性最强。综合上述的精度分析,本研究所提出的方法5在一定程度上改进了已有算法的提取精度和稳定性,可以利用MODIS数据,在复杂的地表和大气状态下进行业务化的云检测。
同时本研究还进一步对比了复杂地表和大气状态下5种算法的云检测效果。图3、图4和图5分别是2013年1月3日、2013年3月14日和2007年3月30日的原始影像和5种算法处理后的结果,这3幅影像分别代表3种典型的复杂地表类型或大气状况。
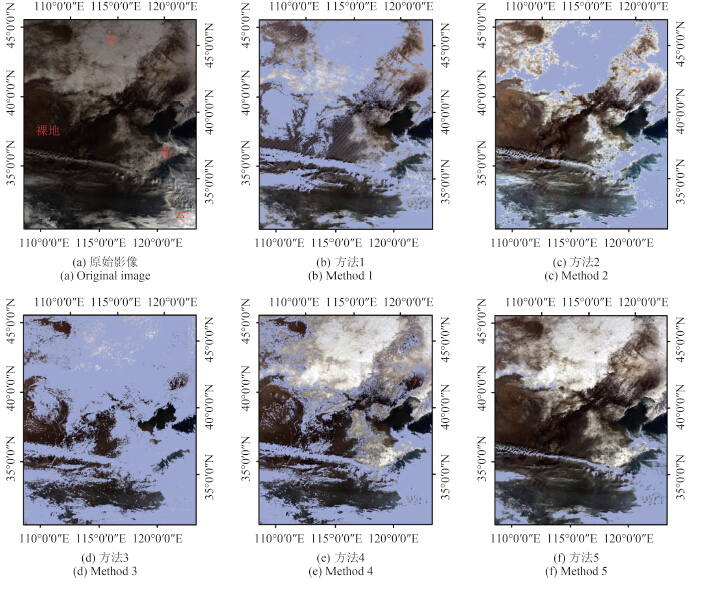
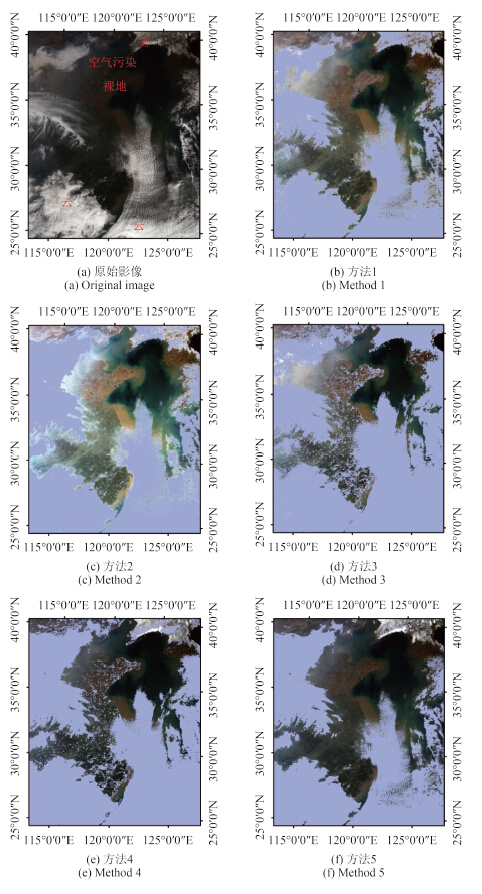
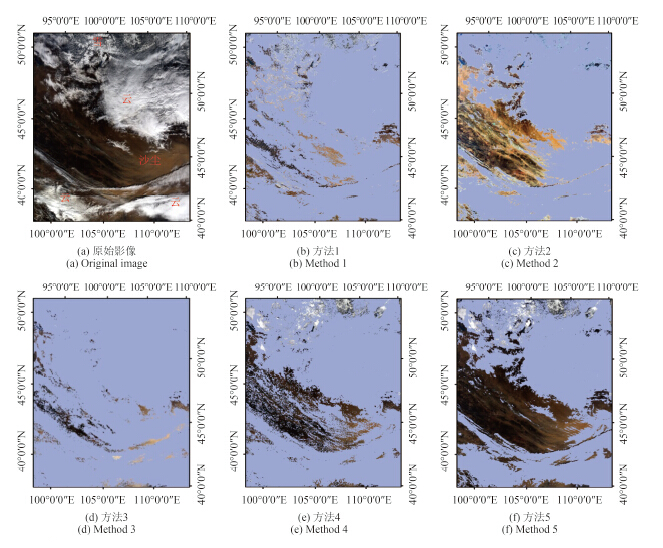
图3影像中的复杂地表覆盖类型及各种类型的层云和卷云,给云检测造成了很大的障碍,尤其是存在的大片雪地与云的光谱特性很相似,云检测时经常会把雪和云一起去除。前3种算法均没有考虑雪,去除云的同时也去除了雪,但仍有较多的雪残留,这样可能会给后续的其他研究造成干扰。方法1对于云的检测效果较好,但对薄卷云不敏感,由于MODIS Terra的29通道数据损坏,处理结果会有虚线条纹存在,影响检测精度;方法2较为保守,云边缘处残留薄暗云较多,对薄卷云也不敏感;方法3对云敏感,云污染少,但由于是利用云的空间差异性来检测,会把空间差异小的厚层云误判为无云地表,把空间差异性大的无云地表误判为云。本文提出的两种算法把云和雪分开检测,几乎保留了所有的雪地,还较好地去除了云,方法4由于利用云的空间差异性进行检测,云污染少,但有较多无云地表被去除。
图4和 5两幅影像分别代表空气污染和沙尘天气, 图4空气污染地区(主要是京津冀地区)的白色污染物在云检测中并未被误判为云,表明5种算法的云检测精度基本不受空气污染的影响,效果较好。而对于 图5,影像中存在大量的沙尘及小部分雪地,云检测难度大,前4种算法的云检测效果均较差,尤其是方法1和方法3对云和沙尘的识别能力差,把大部分的沙尘都检测为云,不适合沙尘地区的云检测,而方法5的云检测效果较好,保留了大部分的沙尘和雪地,只把小部分反射率高的沙尘和雪地误检测为云。
通过9幅影像的精度定量分析和3幅复杂地表及大气状况影像的定性对比,本文提出的后一种算法(方法5),明显优于其他算法,能获得较好的云检测效果,但对于云与雪或沙尘的识别能力还有待进一步提高,同时该方法由于再提取过程中没有将严重空气污染部分滤除,今后可作为提取近地表空气污染气溶胶时的预处理方法。而前一种算法(方法4)除了与方法5相同的缺陷外,还会把较多无云地表误判为云,但是云残留少,因此该方法将适合于地表植被、土地覆盖等对云敏感度要求较高的研究的预处理工作。
4 结 论
对于常见的大气及地表状况遥感反演工作,只有提高云检测的精度,后续研究的精度才会得到有力保障。由于云与其他地表及大气状态的显著光谱差异,长期以来,云检测一直被认为较易检测,但事实上常用算法的云检测精度仍具有较大的不确定性。本文通过综合比较常用的基于MODIS数据的云检测算法,以及云在不同波段的辐射特性,提出了两种适用于复杂地表和大气状况的云检测算法,得到以下主要结论:
(1) 本文提出的两种算法适用于复杂的地表类型和大气状况,方法5的平均总体分类精度和方法稳定性均较高,为92.6±7%,较其他算法有了一定的提高,方法4平均总体分类精度82.92±13%,虽然精度相对较低,但云污染少,适用于对云污染敏感度高的研究。
(2) 复杂的地表类型,尤其是雪地与云的光谱特征有很大相似性,是云检测的一个难点,本文提出的两种算法把雪和云分开检测,既保留了大部分的雪又较好地识别了云,获得了较好的检测效果。
(3) 复杂大气状况下,常用的3种方法和方法4对沙尘的识别能力均较差,但本文提出的第5种方法具有较好的识别效果,改进了已有方法;此外,5种方法对空气污染的识别均获得了较好的效果。
同时,本文也存在一些不足,如用于定量精度评估的参考样本是根据目视解译确定的,存在一定的主观因素;算法不适用于夜晚影像的云检测,对于夜间影像的云检测算法还需进一步探讨。
参考文献(References)
-
Bankert R L.1994.Cloud classification of AVHRR imagery in maritime regions using a probabilistic neural network. Journal of Applied Meteorology, 33 : 909–918. DOI: 10.1175/1520-0450(1994)033<0909:CCOAⅡ>2.0.CO;2.
-
(Hall D K, Riggs G A and Salomonson V V. 2001.Algorithm theoretical basis document (ATBD) for the MODIS snow and sea ice-mapping algorithms. http://modis.gsfc.nasa.gov/data/atbd/atbd_mod10.pdf) http://modis.gsfc.nasa.gov/data/atbd/atbd_mod10.pdf
-
Han L J, Tsunekawa A, Tsubo M, Zhou W Q.2013.An enhanced dust index for Asian dust detection with MODIS images. International Journal of Remote Sensing, 34 : 6484–6495. DOI: 10.1080/01431161.2013.802055.
-
Han L J, Zhou W Q, Li W F.2015.City as a major source area of fine particulate (PM 2.5) in China . Environmental Pollution, 206 : 183–187. DOI: 10.1016/j.envpol.2015.06.038.
-
He Q J, Cao J, Huang J, Wu Z J.2006.Cloud detection in MODIS data based on multi-spectrum synthesis. Remote Sensing for Land andResources : 19–22. ( 何全军, 曹静, 黄江, 吴志军. 2006. 基于多光谱综合的MODIS数据云检测研究. 国土资源遥感 : 19–22. )
-
Kang X G, Sun L X.2005.Automatic cloud detection algorithm on artificial neural networks. Journal of PLA University of Science and Technology, 6 : 506–510. ( 康晓光, 孙龙祥. 2005. 基于人工神经网络的云自动检测算法. 解放军理工大学学报(自然科学版), 6 : 506–510. )
-
Kittler J, Pairman D.1985.Contextual pattern recognition applied to cloud detection and identification. IEEE Transactions on Geoscience and Remote Sensing, GE-23 : 855–863. DOI: 10.1109/TGRS.1985.289471.
-
(Levy R C, Remer L A, Tanre D, Mattoo S and Kaufman Y J. 2009. Algorithm for remote sensing of tropospheric aerosol over dark targets from MODIS: Collections 005 and 051. Product ID: MOD04/MYD04. http://modis-atmos.gsfc.nasa.gov/_docs/MOD04:MYD04_ATBD_C005_rev1.pdf)
-
Li R R, Remer L, Kaufman Y J, Mattoo S, Gao B C, Vermote E.2005.Snow and ice mask for the MODIS aerosol products. IEEE Geoscience and Remote Sensing Letters, 2 : 306–310. DOI: 10.1109/LGRS.2005.847755.
-
Porcú F, Levizzani V.1992.Cloud classification using METEOSAT VIS-IR imagery. International Journal of Remote Sensing, 13 : 893–909. DOI: 10.1080/01431169208904162.
-
Rossow W B.1989.Measuring cloud properties from space: a review. Journal of Climate, 2 : 201–213. DOI: 10.1175/1520-0442(1989)002<0201:MCPFSA>2.0.CO;2.
-
Saunders R W, Kriebel K T.1988.An improved method for detecting clear sky and cloudy radiances from AVHRR data. International Journal of Remote Sensing, 9 : 123–150. DOI: 10.1080/01431168808954841.
-
Sheng X, Sun L X, Zheng Q M.2004.Cloud detection using MODIS data. Journal of PLA University of Science and Technology, 5 : 98–102. ( 盛夏, 孙龙祥, 郑庆梅. 2004. 利用MODIS数据进行云检测. 解放军理工大学学报(自然科学版), 5 : 98–102. )
-
Stubenrauch C, Rossow W B, Kinne S, Ackerman S, Cesana G, Chepfer H, Di Girolamo L, Getzewich B, Guignard A, Heidinger A, Maddux B, Menzel P, Minnis P, Pearl C, Platnick S, Poulsen C, Riedi J, Sayer A, Sun-Mack S, Walther A, Winker D, Zeng S, Zhao G Y. GEWEX cloud assessment: a review//AIP Conference Proceedings. AIP Publishing: Berlin 2013 .
-
Wong M S, Lee K H, Nichol J E, Li Z Q.2010.Retrieval of aerosol optical thickness using MODIS 500×500m 2, a study in Hong Kong and the Pearl River Delta Region . IEEE Transactions on Geoscience and RemoteSensing, 48 : 3318–3327. DOI: 10.1109/TGRS.2010.2045124.
-
Xiang H, Zhang F, Jiang J, Peng J, Zhang X L, Zhang C Y.2014.Analysis of global cloud amount over the past 30 years based on CFSR data. Meteorological Monthly, 40 : 555–561. DOI: 10.7519/j.issn.1000-0526.2014.05.005. ( 向华, 张峰, 江静, 彭杰, 张喜亮, 张春艳. 2014. 利用CFSR资料分析近30年全球云量分布及变化. 气象, 40 : 555–561. DOI: 10.7519/j.issn.1000-0526.2014.05.005. )
-
(Xiong J, Toller G, Sun J Q, Wenny B, Angal A and Barnes W.2013. MODIS level 1B algorithm theoretical basis document, Version 4. http://mcst.gsfc.nasa.gov/sites/mcst.gsfc/files/file_attachments/MODIS_L1B_ATBD_ver4.pdf)
-
Zhang X Y, Liao H, Wang F J.2014.The effects of aerosols and clouds on climate change and their responses. Progressus Inquisitiones DE Mutatione Climatis, 10 : 37–39. DOI: 10.3969/j.issn.1673-1719.2014.01.008. ( 张小曳, 廖宏, 王芬娟. 2014. 对IPCC第五次评估报告气溶胶-云对气候变化影响与响应结论的解读. 气象变化研究进展, 10 : 37–39. DOI: 10.3969/j.issn.1673-1719.2014.01.008. )


