

|
收稿日期: 2017-09-13
基金项目: 内蒙古自治区气象局科技创新(编号:nmqxkjcx201804);内蒙古自然科学基金(编号:2017MS0410);内蒙古自治区气象局青年基金(编号:nmqnqx201705);中国气象局气候变化专项(编号:CCSF201721)
第一作者简介: 李彬,1989年生,男,助理工程师,研究方向为地表辐射平衡。E-mail:983229508@qq.com
中图分类号: TP79
文献标识码: A
|
摘要
沙尘作为对流层气溶胶的主要成分,对气候系统有许多影响;同时,作为环境污染物,对人类健康危害也很大。沙尘天气一般在春季爆发,对中国北方大部分区域的生产和生活有较大影响。以往针对沙尘遥感监测人们开展了许多研究,取得了一定的效果。但对于一些云和沙尘混合的复杂状况,传统方法识别效果较差,几乎不能有效识别出沙尘。采用葵花8号(Himawari-8)卫星数据,提出一种针对性的识别方法。引入了0.46 μm和0.51 μm反射率差值RDI,统计发现该指数在一定范围内可以表现出沙尘连续性特征,并有效地将中高云和大部分地表与沙尘区分开来。碎积云的RDI值分布与沙尘的较为相似,为此进一步引入了灰度熵方法来滤除。例举了3次沙尘过程的判识结果,并结合地面观测数据进行了验证。其中对2017年5月4日沙尘的地面验证表明,位于云沙混合区的27个站中有22个站的地面观测与判识相一致。对于一些复杂条件下的沙尘,该方法是对分裂窗亮温差的有效补充。
关键词
灰度熵, 热红外亮温差, 沙尘, 可见光, 葵花8号(Himawari-8)
Abstract
Dust, as the main component of aerosols, has numerous effects on a climate system. Simultaneously, dust is harmful to human health as an environmental pollutant. The dust weather generally erupts in spring, thereby significantly affecting the production and life of most regions in Northern China. In the past, many studies have been conducted to identify dust by remote sensing. However, the traditional method has a poor effect and can hardly recognize dust in several complex situations, such as cloud–dust mixing. The dust process is typically accompanied by clouds, which are the main interfering factors in identifying dust. The judgment of pure dust is improved in the thermal infrared band, but the effect is poor for the dust mixed with clouds. In terms of microwave, the sensor is carried mostly by a polar orbit satellite, which time and space resolutions are low. This sensor cannot display real-time dust monitoring and warning. In this study, a new method was proposed using the data from the Himawari-8 satellite. In fact, the dust mixed with clouds demonstrated better successive distribution characteristics in space than in medium clouds and fractocumulus. Thus, the dust mixed with clouds could be identified. A difference in the reflectivity of 0.46and 0.51 μm in a certain range could properly exhibit the continuity characteristics of dust and effectively distinguish clouds and most surfaces with dust by analyzing several visible channels of the Himawari-8. A threshold less than 10—15 could cover most dust mixed with clouds in accordance with the experimental statistics. However, an RDI value of broken cumulus was mainly distributed between 5 and 15, which was similar to the RDI value of dust. Therefore, we introduced the entropy of brightness. In this study, pure dust was identified using a BTD value that is less than 0, and the dust mixed with clouds was identified through the new method. In the spring and summer of 2017, several types of dust accumulated in Inner Mongolia in China and its surrounding areas. We used the satellite data for April 16, May 4, and August 2 combined with visual interpretation and ground observation results to analyze and verify the proposed method. In the two dust processes of April 16 and August 2, we selected three typical regions with mixed cloud and dust. The dust storm on May 4 was large. Therefore, this dust storm was used to analyze and validate the algorithm on a large scale. The verification of dust on May 4, 2017, showed that the observations of the 22 stations were consistent with the results of 27 stations located in the cloud–sand mixing region. The algorithm proposed in this study achieved a significant result in dust recognition under various cloud–sand mixing conditions. A new method based on the brightness entropy of RDI was proposed in this study. The method could effectively identify dust mixed with clouds in comparison with the results of traditional methods or using visual interpretation and ground observation. This method compensates for the limitations of existing algorithms and data to a large extent. However, significant complications in recognition of certain floating dust and large-thickness cloud still exist. The accuracy of recognition will also be affected by the complex condition of the surface. This study reveals that the method exerted a certain effect on pure dust, which can be further discussed in the other research. In addition, this method is still limited when identifying dust at night.
Key words
gray level entropy, BTD, dust, visible band, Himawari-8
1 引 言
气溶胶是大气辐射平衡和气候变化中不确定性的一个关键因素,沙尘作为对流层气溶胶的主要成分,对气候系统有许多影响,如辐射效应减少地表曝晒及其与云微物理的相互作用从而抑制降水。同时,作为环境污染物,对人类健康危害很大。而且对社会经济发展,生态安全以及水循环等一系列活动有着直接或间接的影响。沙尘天气一般在春季爆发,且对中国北方大部分区域的生产和生活有较大影响(韩晶晶 等,2006;姜大海 等,2011;周永波 等,2014)。
沙尘气溶胶具有明显的时空变化特性和复杂的化学组成,地基观测资料的限制使得沙尘气溶胶的研究还有很大的不确定性,而且沙尘爆发一般具有较大的影响范围,一般发生在自然条件恶劣的地区,而这些地区地基观测站点少且分散,给监测、预报和研究沙尘暴带来很大困难(郑新江 等,2008)。而卫星遥感监测范围广、波段多的优势可以弥补这些不足,因此,针对沙尘遥感监测人们开展了许多研究,发展了一些算法。
由于有时在同一通道上(如可见光或热红外通道)沙尘暴、地表和云的探测数值十分接近,故使用单一通道准确判识沙尘暴比较困难,而通过不同通道的探测值的数学组合,可以较好地获得沙尘暴、地表和云在反照率和温度上存在的差异,来判识沙尘暴区。
Norton等人(1980)利用静止卫星的可见光通道监测海上沙尘并计算了光学厚度。郑新江等人(2001)利用3.7 μm和11 μm通道亮温比值和1.06 μm波段反射率建立回归关系来判识沙尘暴。Romano等人(2013)利用基于可见光和红外波段的多通道方法对MSG-SEVIRI的数据进行了沙尘识别。但是在可见光波段,沙尘在特征上表现出了与细碎云、积云等中低云的相似性,给识别造成一定困难。范一大等人(2001)利用NOAA/AVHRR可见光和红外通道建立查找表增强显示沙尘信息,但云仍是判识的主要制约因素。
自1970s以来,科学家在利用卫星资料识别沙尘爆发方面主要通过两种手段。一个是可见光和近红外通道,一个是热红外通道。Ackerman等人(1997)较早提出分裂窗插值识别沙尘,利用红外亮温差(T3.7 μm-T11 μm)监测沙尘(Shenk和Curran, 1974),对以后的沙尘定量识别提供了思路。可以说热红外分裂窗在沙尘识别上具有较大优势,特别是在高反射地表和夜间(Zhang 等,2006)。因此热红外亮温差BTD(Brightness Temperature Difference)也经常被用于沙尘的监测。延昊等人(2004)利用热红外亮温差(T11 μm-T12 μm)针对对NOAA/AVHRR资料进行沙尘监测,Chaboureau等人(2007)利用BTD对沙尘和卷云的区域气象预测模型进行了评估。Schepanski等人(2007)采用8.7 μm、10.8 μm和12 μm三通道亮温差对撒哈拉沙漠地区的沙尘源区进行了分析。Zhang等人(2006)利用BTD进行了MODIS数据的沙尘监测,并利用辐射传输模式建立了不同光学厚度、BTD、BT11 μm与有效粒子半径的查找表。Klüser和Schepanski(2009)结合BTD与时间序列方法进行沙尘监测,Legrand等人(2001)也利用晴空和沙尘的热红外亮温差异来识别沙尘,但是对强度大持续时间长的沙尘效果较差。Park等人(2014)在BTD的基础上引入了亮温比BTR来消除地表温度变化造成的影响。热红外亮温差BTD是目前来说既简单又行之有效的沙尘监测方法,但是其本身也存在着一些局限。因为大气的水汽含量对BTD也有较大影响(Chaboureau 等,2007)。在地表温度一定的条件下,只有当水汽含量较小时,亮温差才对各等级的沙尘气溶胶敏感;当水汽含量较大时不敏感。同时,无论水汽含量多少,亮温差绝对值均随地表温度升高而增大。水汽含量较低时,沙尘十分浓厚的情况下,差值反而会回升(詹奕哲 等,2012)。在一些云和沙尘混合的地区该方法识别效果较差,几乎不能有效识别沙尘。
罗敬宁等人(2015)对多通道沙尘光谱特征进行分析,提出综合遥感沙尘判识方法。利用风云三号卫星的近红外1.6 μm、中红外3.7 μm以及热红外分裂窗进行了一次全球沙尘的实例监测。海全胜等人(2009)利用地物比辐射率特征,结合MODIS热辐射波段特征,讨论了沙尘暴发时地表比辐射率在8.5 μm和11 μm处的变化特征,建立了一个判别沙尘强度的指数DSI。徐辉等人(2013)利用风云三号卫星,假设12 μm比辐射率为1的情况下,沙尘区的11 μm相对比辐射率会小于1的特征识别沙尘。但比辐射率在云和沙尘混合的区域识别效果较差,因为水汽云在11 μm的散射能力强于12 μm,而吸收能力弱于12 μm,表现出与沙尘相似的比辐射率特征,特别是弱沙尘区域。
Huang等人(2007)认为BTD方法对识别卷云下沙尘几乎没有效果,因此他发展了利用微波数据对卷云下沙尘的识别方法,提出了微波极化亮温差(MPTD)微波极化指数(MPI)来识别沙尘,取得了一定效果。
沙尘过程一般都伴随着云,而云是沙尘判识中的主要干扰因素。在可见光波段难以与细碎积云等中低云区分;在热红外波段对纯沙尘的判识效果较好,但对于混有云的沙尘则效果较差;在微波方面,由于微波传感器目前多搭载于极轨卫星,数据存在时间和空间分辨率都较低的局限,无法对沙尘发生发展进行实时有效的监测预警。因此如何利用高时空分辨率数据进行更加有效的沙尘识别是当前主要的研究方向。
葵花8号H8(Himawari-8)是世界上第一颗可以拍摄彩色图像的静止气象卫星,以往的卫星每小时只能观测整个地球一次,H8的观测频率提高到了每10 min一次,对云层等动向的持续观测性能也得到了提升,从彩色图像上还能掌握黑白图像中无法与云层相区分的沙尘的情况,主要用于监测暴雨云团、台风动向以及持续喷发活动的火山等防灾领域。因此,本文使用H8卫星数据提出一种新的基于可见光波段灰度熵对一些混合条件下的沙尘进行判识,并结合分裂窗亮温差的沙尘综合判识方法。
2 数据介绍
H8是日本气象厅(JMA)的第2代静止气象卫星,2014年10月发射成功,2015年7月投入正式业务运行,中国气象部门于2016年底中国气象部门开始投入业务运行。
H8有16个通道,分布于可见光—近红外—热红外。H8搭载高级成像仪(AHI)能扫描5个区域:Full Disk(全球范围)、Japan Area(两个日本地区的范围)、特定区域(两个范围)、地标性区域(两个范围)。用于拍摄全球范围和日本地区的扫描范围是固定的,其他的两个特定区域和地标性区域是可以灵活调整的,不论是哪种拍摄模式,时间分辨率最少都能达到10 min,分辨率1—2 km。
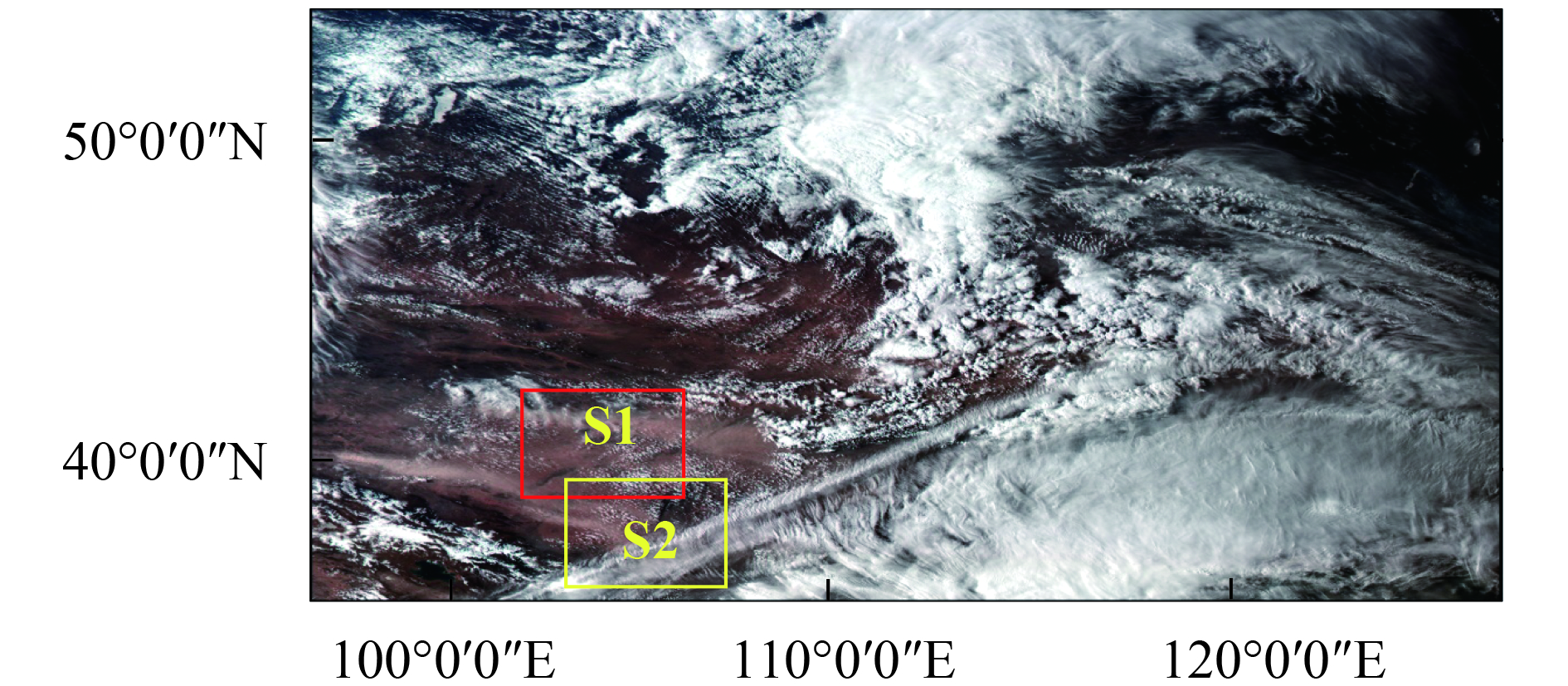
本文使用了2017年春夏季发生于中国内蒙古自治区及其周边地区的几次典型的沙尘天气过程,即4月16日、5月4日和8月2日共3天的卫星数据,结合目视解译与地面观测结果对提出的方法进行了分析验证。图1为2017年4月16日17时H8号卫星影像,范围为北纬36°—54°,东经97°—127°。针对4月16日和8月2日两次范围较小的沙尘过程,本文选取了3处典型的云和沙尘混合区域,其中4月16日的为S1和S2,如图1中标记的红色和黄色方框,8月2日的被记为S3(图10)。5月4日的沙尘过程波及的范围较大(图11),影像范围为北纬41°—54°,东经110°—127°,利用这一天的数据对本文算法在大范围进行了分析和验证。地面观测数据来自全国综合气象信息共享平台(CIMISS)和地方气象台发布的气象信息。

3 判识方法
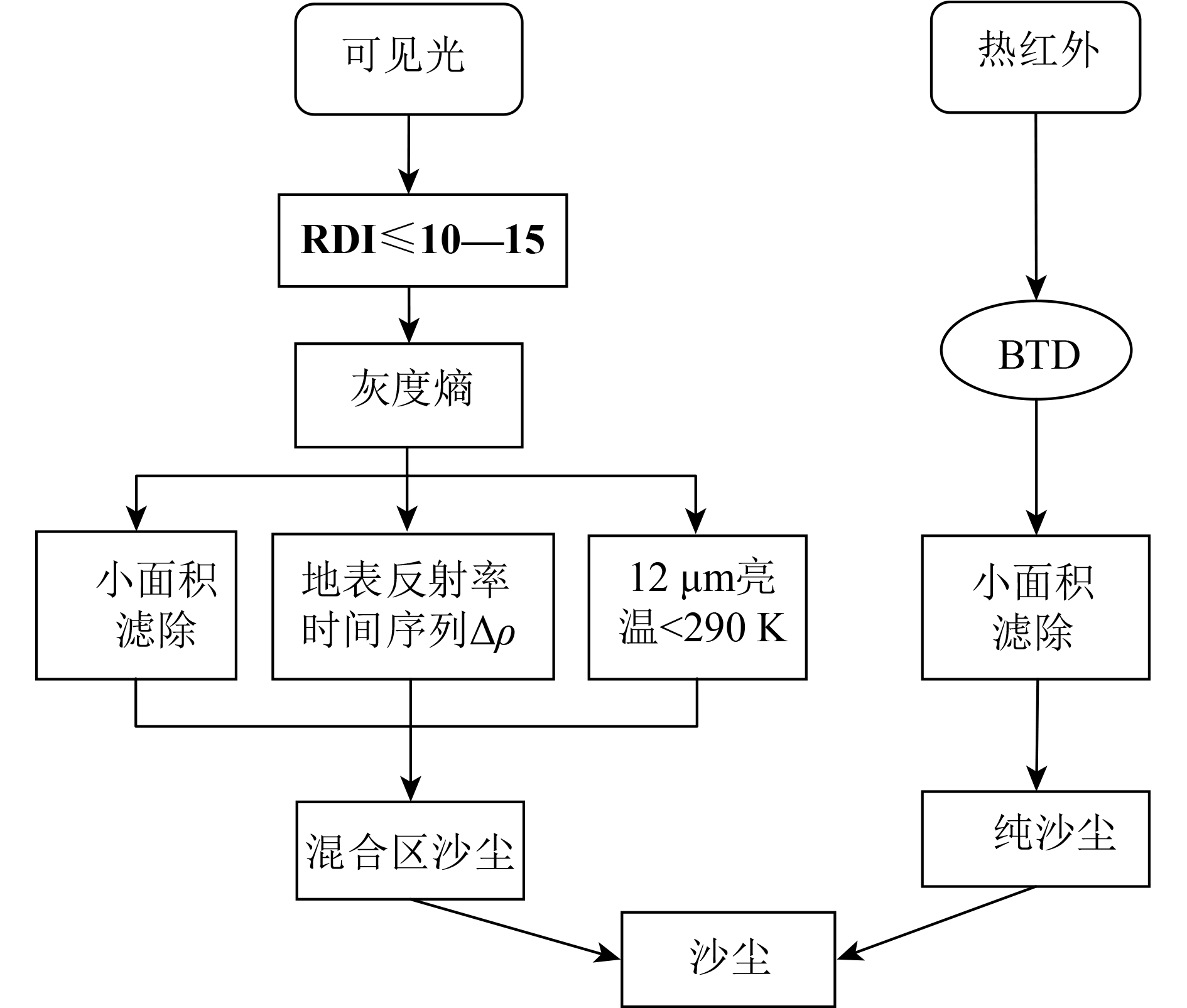
图2为判识的流程图,一部分是基于热红外的纯沙尘的判识,另一部分是基于可见光灰度熵的混合区沙尘的判识。最后将两者的结果取并集,得到较为真实的沙尘判识结果。
3.1 热红外亮温差
对于长波红外辐射而言,它们在空中组成类似云的物质表面,足以改变长波发射辐射的分布。在波长11 μm和12 μm的热红外波段处,水汽的吸收存在较大差异。沙尘气溶胶折射率虚部的差异会影响沙尘天气的大气辐射,导致亮温差ΔT<0(延昊 等,2004)。近红外和中红外波段,对于强沙尘的识别效果较好,对于弱浮尘,受到地表反射辐射的影响较大,识别效果较差。热红外分裂窗利用两个通道的差异来识别,这种对强弱沙尘都存在。BTD方法还可以有效剔除大范围连续云区。因此,本文使用BTD值小于0先对纯沙尘进行识别,再针对混合区进行判识。
| ${\rm{BTD}} = {T_{11{\text{μ}} {\rm{m}}}} - {T_{12{\text{μ}} {\rm{m}}}}$ | (1) |
式中,T11 μm和T12 μm为11 μm和12 μm亮温。
3.2 反射率差异指数RDI
浓度较大的沙尘对太阳短波辐射产生很强的后向散射,足以明显地改变地气系统的反照率,在可见光波段沙尘具有较高的辨识性。如图3为2017年4月16日的沙尘过程中一块典型的云沙混合区。通过真彩色图像可以很容易的辨识出沙尘区,但是对于可见光通道,沙尘一般表现为中亮度的景观特征,与低云的反射率阈值区间重合;使用单一光谱通道分析时发现,沙尘与某些景观物的相似性非常高,很难用简单的光谱阈值加以区分。另外,当云与沙尘混合在一起,或沙尘包裹云(如细碎的积云)时,由于水汽的增加,使得分裂窗亮温差对沙尘的敏感性下降,因而无法识别(Chaboureau 等,2007;詹奕哲 等,2012)。

包裹云的沙尘相比中低云和碎积云而言,在空间上具有更好的均匀分布特征,与沙尘光谱特征相似的中低云、积云等表现为细碎和不连续的分布特征(徐辉 等,2013)。基于这一特征,可以对沙云混合状态下的沙尘气溶胶进行识别。通过对H8卫星几个可见光通道的分析发现,0.46 μm和0.51 μm的反射率差值在一定范围内可以很好地表现出沙尘连续性特征,有效地将中高云和大部分地表与沙尘区分开来。因此,本文首先定义了反射率差异指数RDI,其表达式如式(2),为了便于区分和设定阈值,将差值放大1000倍。
| ${\rm{RDI}} = \left| {{R_{0.46}}} \right. - \left. {{R_{0.51}}} \right| \cdot 1000$ | (2) |
式中,R0.46和R0.51为0.46 μm和0.51 μm的反射率。
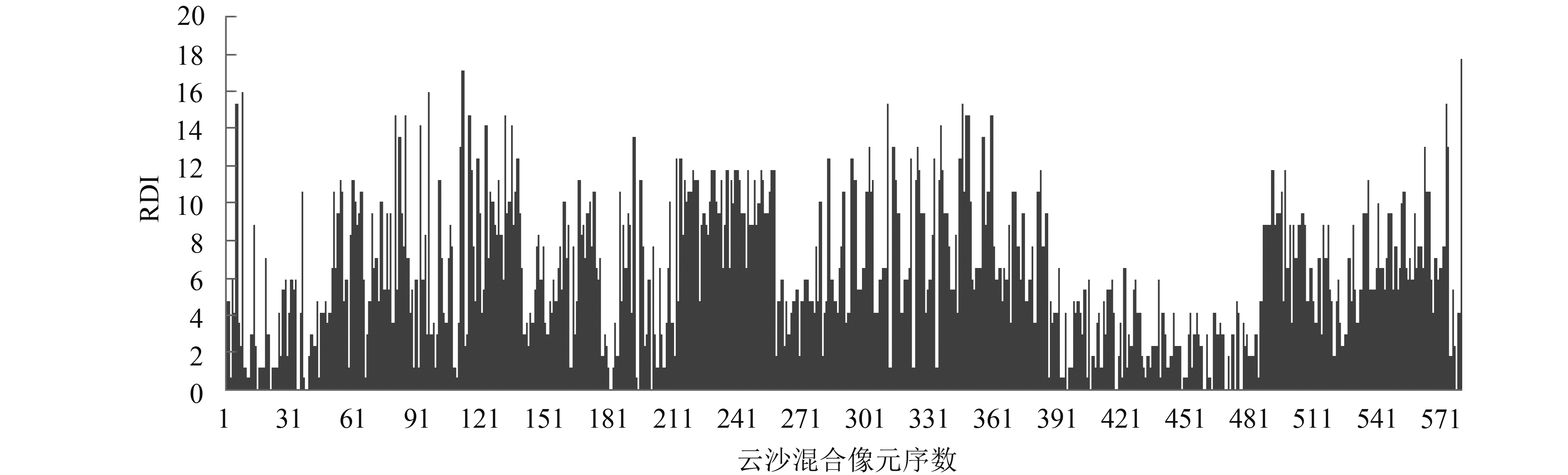
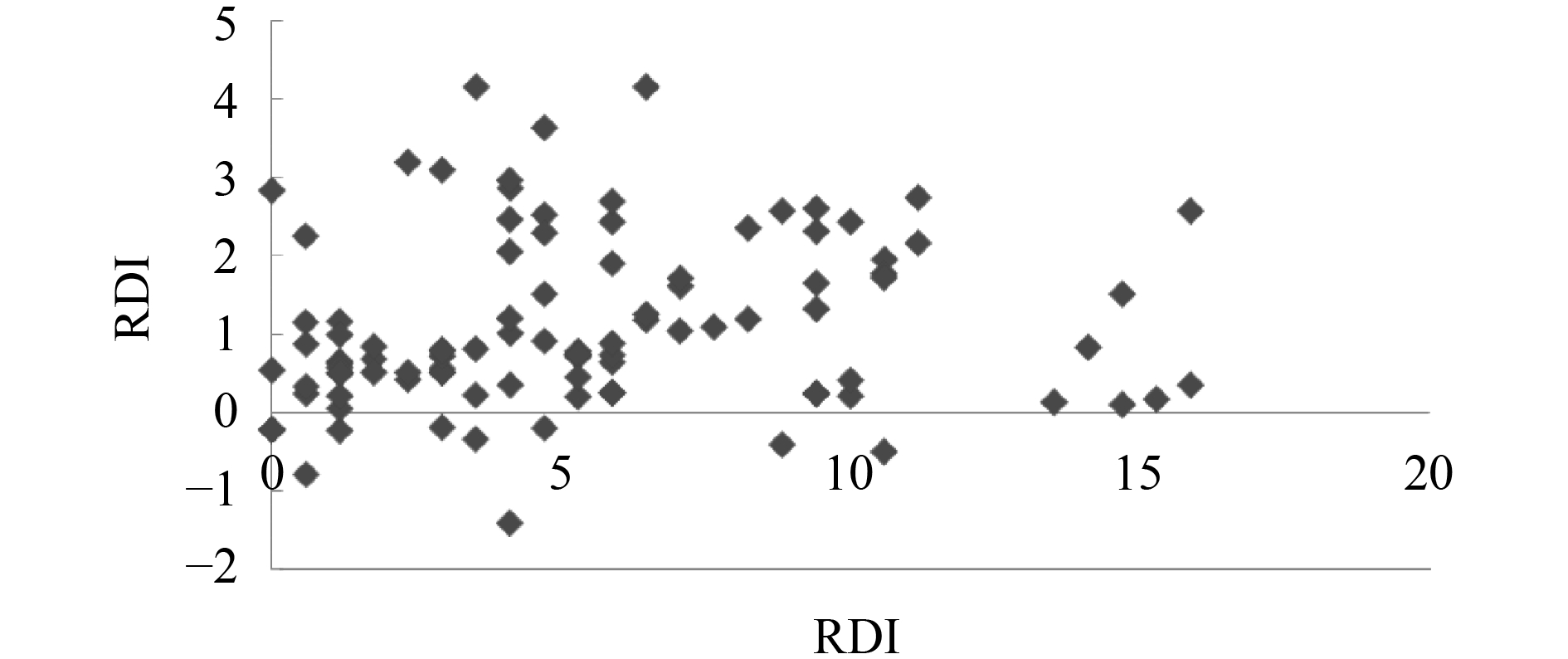
经过实验统计发现,将该阈值设定为小于10—15能够覆盖绝大部分混合沙尘区。图4为从2017年4月16日、5月3日、5月4日、6月2日、8月2日和9月21日的6次沙尘过程中随机选取的600个云沙混合区像元(主要为沙包裹云的情形)RDI值的分布情况。其中有80%的值小于10,13%在10—15,这主要与沙尘所包裹云的状态有关,因此在阈值选取时需要做一定的调整。图5是其中100个像元的RDI和BTD的分布情况,可以看出混合区像元的亮温差值有约90%是大于0的,而RDI值则绝大部分小于15。
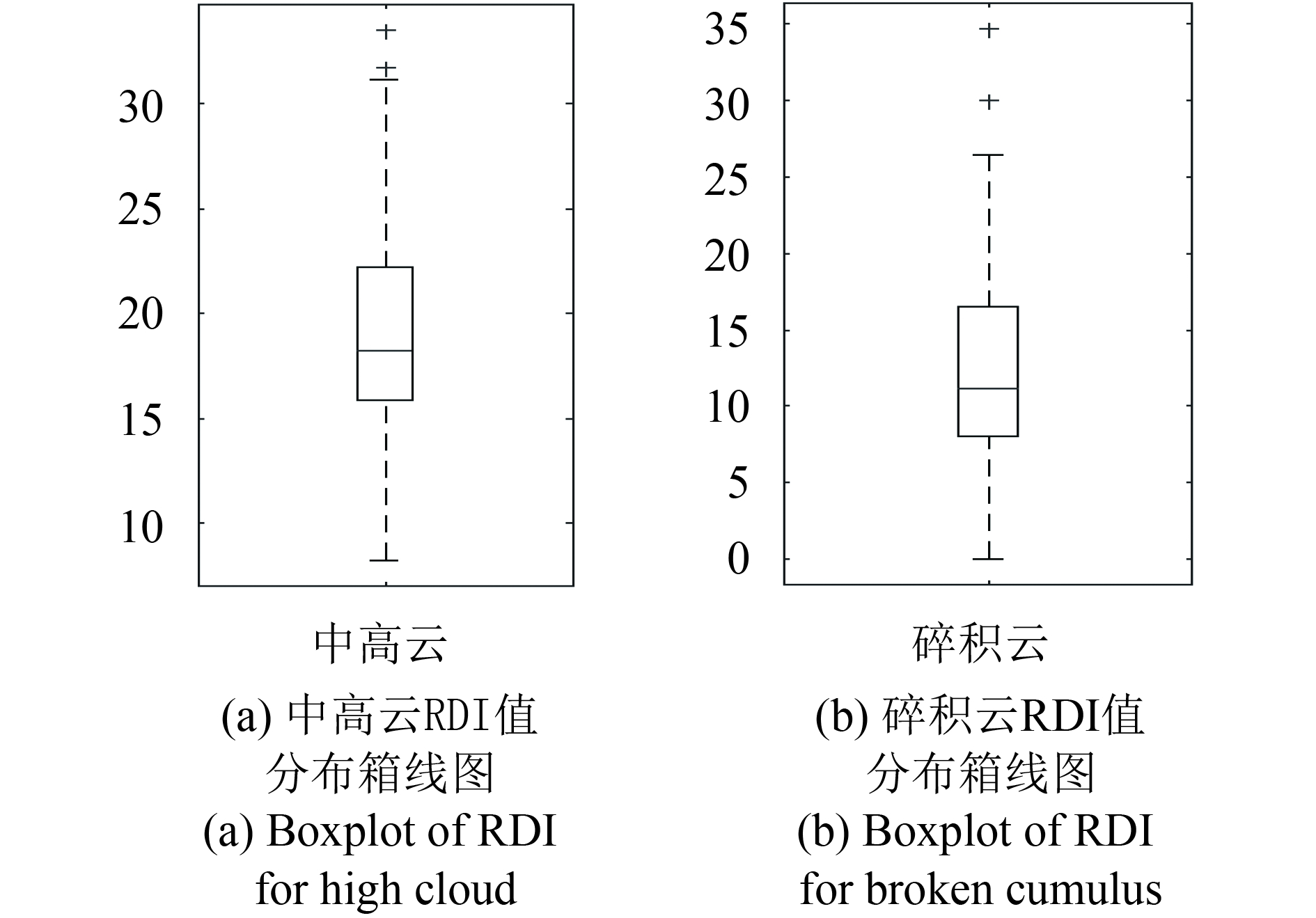
云是沙尘判识过程中的主要干扰因素,而伴随沙尘发生的主要是一些碎积云和层云。为了分析RDI对这两类云的区分效果,分别选取了100个碎积云和300个中高云(主要是层云和卷云)像元的RDI值进行统计,得到如图6所示的箱线图。可以看出中高云的RDI值集中分布于15—25,算法对此类云的区分作用明显。碎积云的RDI值则主要分布于5—15,与沙尘的RDI值分布较为相似,因此其对于碎积云的区分效果有限,为此进一步引入了灰度熵的方法。
3.3 基于RDI的灰度熵
经过RDI识别后碎积云虽然不能被滤除,但都表现出细碎和不连续的分布特征(图7)。要进一步识别出沙尘,只需要将不连续的积云滤除,保留具有连续特征的沙尘。
本文采用张永亮等人(2008)提出的基于图像灰度熵的团块目标检测方法。该方法假设n×n的窗口内像元灰度分别为a1,a2,
| $H = - \sum\limits_{i = 1}^{{n^2}} {\mathop p\nolimits_i \mathop {\log }\nolimits_2 \mathop p\nolimits_i } /\mathop {\log }\nolimits_2 \mathop n\nolimits^2 $ | (3) |
| $\mathop p\nolimits_i = \mathop a\nolimits_i /\sum\limits_{j = 1}^{\mathop n\nolimits^2 } {\mathop a\nolimits_j } $ | (4) |
式中,0≤H≤1。灰度熵反映了窗口内像元灰度的差异程度,灰度熵越大表明窗口内能量的空间分布越均一,即像素灰度差异越小,当窗口内所有像素灰度值相同时,图像灰度熵为1;反之,值越小表明灰度差异大。首先将经过RDI判识之后的结果转化为二值图像,并设定3×3像元的窗口进行灰度熵检测。这样窗口内的灰度熵值就只有0和1两个值,将值为0的窗口判断为非沙尘区,反之为沙尘。

沙尘与云混合或云被沙尘包裹时所表现出的光谱特征较为复杂,当沙尘影响范围较大时,其周围包含各种类型的地表,使得准确识别难度增大。因此,为了进一步提高识别的准确性,减少误判,本文在灰度熵检测的基础上加入了亮温、反射率对无沙尘地表加以剔除。
沙尘大多表现为中低反照率的暖性景观物特征,因此可以使用热红外通道亮温进行阈值判识,以剔除地表影响。罗敬宁等人(2015)通过对沙尘与地表长期统计分析,确定沙尘与地表分界大致集中在290 K,这里将12 μm亮温大于290 K的视为地表。但是,有些暗地表温度较低,相比沙尘它们的反射率较低,同时地表状态具有一定的季节性差异,因此又加入了反射率差值进行区分,如式(5):
| $\Delta {\rho _{\rm{t}}} = {\rho _{\rm{t}}} - \bar \rho $ | (5) |
式中,
最后,由于有云的干扰,使得分裂窗亮温差会将一些细碎云和高云判识为沙尘,且一般呈现离散的分布(Park 等,2014);另一方面,在利用灰度熵进行判识时也会识别出一些面积较小的区域,基于沙尘连续且具有一定范围的特点,对于这些面积较小、细碎、脱离主体沙尘区的判识结果予以滤除。
4 结果与分析
本节主要对前文所述的实验数据和区域,首先针对云沙混合区利用灰度熵算法进行识别,同时也在相同区域分别使用分裂窗亮温差BTD和罗敬宁等人(2015)提出的沙尘多波段综合判识方法进行沙尘判识,并将结果进行比较分析。图8—10分别为区域S1—S3对应的真彩色影像、利用灰度熵算法所得到的判识结果、使用分裂窗亮温差BTD和综合判识方法所得结果。然后将BTD与灰度熵算法结合在大范围区域内进行判识,并与观测数据进行对比验证。
区域S1为一个典型的沙尘与中云混合状态,由图8(a)的真彩色图像可以明显的看出云被沙尘包裹在里面,这样其中的水汽含量会大大增加,导致BTD方法不能对此类情况进行有效识别(图8(c)),BTD所得结果没有判识出该区域的沙尘。同样综合判识方法也未能有效判识,如图8(d)。而灰度熵方法则很好地识别出了区域内这段包裹着云的沙尘(图8(b)),图8中绿色圆点标记了沙尘所覆盖区域的地面气象站位置,表1中包含了该站的经纬度和当时次所观测的天气现象以及算法判识结果,可以看出观测与判识结果一致。

表 1 2017年4月16日17时地面观测与灰度熵算法识别结果
Table 1 Observation on the ground and detective results by entropy of 17:00 on April 16, 2017
| 站号 | 经纬度 | 天气现象 | 是否识别为沙尘 |
| 52378 | 102.37°E,41.37°N | 扬沙 | 是 |
区域S2为一个典型的沙尘与积云混合状态,碎积云分布细碎而分散,一般由对流生成。由图9(a)的真彩色图像可以看到沙尘区分为明显的上下两段。下段的沙尘较厚,因此积云对判识的影响较小,BTD和综合判识方法基本能对此类情况进行有效识别,如图9(c)和9(d)所示。
而上段的沙尘则较为轻薄的浮尘,无论在前半段积云较少的区域还是后半段较多的区域,前述两种方法都未能做出有效的判识。而本文所述方法则较好地识别出了区域内这段包裹着云的沙尘(图9(b))。但是对于一些轻薄的浮尘的识别仍然有较大难度,并且当积云的高度较高,厚度较大时,也较难排除其干扰,如前半段与后半段断开的区域。

根据阿拉善盟气象台8月2日19时发布的气象信息,8月2日17时34分—17时57分,额济纳旗达来呼布镇出现短时强沙尘暴天气,最小能见度150 m,极大风速20.3 m/s,沙尘天气过后出现小阵雨。区域S3为一次由强对流天气所导致的局地性的沙尘过程,由图10(a)可以看到沙尘被对流云团所包围,这样其中会裹挟较多的水汽,导致BTD不能进行有效识别(图10(c)),同样综合判识方法也未能有效判识。而本文所述方法则很好地识别出了区域内这段包裹着云的沙尘(图10(b)),红圈即为达来呼布镇所在位置。实际上,在利用H8静止卫星监测时发现,在8月2日17时沙尘在达来呼布镇西南开始出现,17时30分时沙尘的前锋已经向东北移动约30 km。据此可以看出静止卫星在沙尘监测上的优势,可以实现对沙尘天气的提前预警。

上面通过对3个典型的沙尘过程的判识结果的分析和对比可以发现,相比传统方法在沙尘识别上的局限性,本文所提出的算法在各种不同云沙混合条件下的沙尘判识中取得了较理想的效果,一定程度上提升了沙尘遥感判识方法的准确性和适用性。
为了进一步论证算法的适用性,选取了2017年5月4日14时的一幅影像进行综合判识,并用3种方法比较验证。2017年5月4日发生了一次持续时间长、波及范围广的强沙尘过程,主要是由一个较强的蒙古气旋所导致的,影响了内蒙古自治区及北方大部分地区。如图11所示,图11(a)为真彩色图像,其中圆圈为站点位置,绿色表示算法判识与地面观测均为沙尘天气,红色表示地面观测为沙尘,算法判识非沙尘天气;图11(b)、图11(c)分别本文算法和BTD的判识结果(多波段判识结果与BTD相差不大,未列出)。
图11(a)标出了2017年5月4日14时27个地面观测站的观测与本文算法识别结果,这27个站均位于云沙混合区,BTD未能有效识别。可以看出22个站的地面观测与判识一致,有5个站地面观测为浮尘或扬沙,而算法未能识别出。从这5个站的分布情况可以看出,它们上方有较厚的云层,沙尘主要位于云层下方,因此给识别造成了较大困难。通过与地面观测、目视解译的结果(图11(d))比较可以发现,本文算法明显优于其他两种算法,特别是在云和沙尘的混合区域,如伴随着积云的沙尘区,气旋中心的沙尘区,与气旋云系混合在一起的沙尘,云系边缘的沙尘和薄云下的沙尘等多种情况。对于这些复杂条件下的沙尘,传统方法都表现出了较大的局限性,而本文方法则能够进行较为有效的识别。

5 结 论
由于卫星遥感在诸多方面的优势,在生态环境监测领域发挥着越来越大的作用,沙尘也不例外。针对沙尘遥感监测人们开展了许多研究,取得了一定的成果,但对于一些云和沙尘混合的复杂状况,传统方法识别效果较差,几乎不能有效识别出沙尘。本文提出了一种新的基于可将光波段的灰度熵的识别方法,并结合了分裂窗亮温差,进行综合判识。通过与传统方法判识结果、目视解译和地面观测进行比较,结果表明该方法可以对多种云沙混合的复杂条件沙尘进行有效判识,可以在很大程度上弥补现有算法和数据上的不足。
但是,对于一些厚度较小的浮尘和光学厚度较大的云下沙尘,仍有较大的判识难度;另一方面,在大范围复杂地表情况下判识的准确性也会受到影响。如在进行大范围监测时,有时会将一些云误判为沙尘,因此需要进行滤云处理,而过程中又会对真实的沙尘判识结果造成一定影响,特别是一些薄云下的沙尘,容易被当做云处理。另外,由于静止卫星的位置固定,随太阳高度角变化,在一天中反射率的变化较大,因此在判识过程中应该考虑针对不同时间段的反射率差值;同时RDI指数的阈值设定虽然能够覆盖大部分沙尘,但是上述因素仍会造成一定影响。研究过程中发现方法对于纯沙尘也有一定的识别效果,在以后的研究中或可做进一步探讨。另外,本方法在判识夜间沙尘时仍存在局限。
参考文献(References)
-
Ackerman S A. 1997. Remote sensing aerosols using satellite infrared observations. Journal of Geophysical Research: Atmospheres, 102 (D14): 17069–17079. [DOI: 10.1029/96JD03066]
-
Chaboureau J P, Tulet P and Mari C. 2007. Diurnal cycle of dust and cirrus over West Africa as seen from Meteosat Second Generation satellite and a regional forecast model. Geophysical Research Letters, 34 (2): L02822 [DOI: 10.1029/2006GL027771]
-
Fan Y D, Shi P J, Pan Y Z and Jing G F. 2001. Monitoring the intensity of regional dust storm using NOAA/AVHRR data. Journal of Natural Disasters, 10 (4): 46–51. ( 范一大, 史培军, 潘耀忠, 景贵飞. 2001. 基于NOAA/AVHRR数据的区域沙尘暴强度监测. 自然灾害学报, 10 (4): 46–51. )
-
Hai Q S, Bao Y H, Alatengtuoya, Bao G and Guo L B. 2009. New method to identify sand and dust storm by using remote sensing technique—with inner Mongolia autonomous region as example. Journal of Infrared and Millimeter Waves, 28 (2): 129–132. ( 海全胜, 包玉海, 阿拉腾图雅, 包刚, 郭利彪. 2009. 利用遥感手段判识沙尘暴的一种新方法——以内蒙古地区为例. 红外与毫米波学报, 28 (2): 129–132. )
-
Han J J, Wang S G, Qi B, Shang K Z, Yang D B and Shang B Y. 2006. Distribution of aerosol optical thickness and its relation with dusty weather in China. Journal of Desert Research, 26 (3): 362–369. ( 韩晶晶, 王式功, 祈斌, 尚可政, 杨德保, 尚宝玉. 2006. 气溶胶光学厚度的分布特征及其与沙尘天气的关系. 中国沙漠, 26 (3): 362–369. )
-
Huang J P, Ge J M and Weng F Z. 2007. Detection of Asia dust storms using multisensor satellite measurements. Remote Sensing of Environment, 110 (2): 186–191. [DOI: 10.1016/j.rse.2007.02.022]
-
Jiang D H, Wang S G and Shang K Z. 2011. Quantitative assessment of sandstorm risk. Journal of Desert Research, 31 (6): 1554–1562. ( 姜大海, 王式功, 尚可政. 2011. 沙尘暴危险度的定量评估研究. 中国沙漠, 31 (6): 1554–1562. )
-
Klüser L and Schepanski K. 2009. Remote sensing of mineral dust over land with MSG infrared channels: a new Bitemporal Mineral Dust Index. Remote Sensing of Environment, 113 (9): 1853–1867. [DOI: 10.1016/j.rse.2009.04.012]
-
Legrand M, Plana-Fattori A and N’Doumé C. 2001. Satellite detection of dust using the IR imagery of Meteosat: 1. Infrared difference dust index. Journal of Geophysical Research: Atmospheres, 106 (D16): 18251–18274. [DOI: 10.1029/2000JD900749]
-
Luo J N, Xu Z and Qi Y G. 2015. Global dust remote sensing with the Fengyun-3 satellite. Journal of Desert Research, 35 (3): 690–698. [DOI: 10.7522/j.issn.1000-694X.2014.00078] ( 罗敬宁, 徐喆, 亓永刚. 2015. 基于风云三号卫星的全球沙尘遥感方法. 中国沙漠, 35 (3): 690–698. [DOI: 10.7522/j.issn.1000-694X.2014.00078] )
-
Norton C C, Mosher F R, Hinton B, Martin D W, Santek D and Kuhlow W. 1980. A model for calculating desert aerosol turbidity over the oceans from geostationary satellite data. Journal of Applied Meteorology, 19 (6): 633–644. [DOI: 10.1175/1520-0450(1980)019<0633:AMFCDA>2.0.CO;2]
-
Park S S, Kim J, Lee J, Lee S, Kim J S, Chang L S and Ou S. 2014. Combined dust detection algorithm by using MODIS infrared channels over East Asia. Remote Sensing of Environment, 141 : 24–39. [DOI: 10.1016/j.rse.2013.09.019]
-
Romano F, Ricciardelli E, Cimini D, Di Paola F and Viggiano M. 2013. Dust detection and optical depth retrieval using MSG-SEVIRI data. Atmosphere, 4 (1): 35–47. [DOI: 10.3390/atmos4010035]
-
Schepanski K, Tegen I, Laurent B, Heinold B and Macke A. 2007. A new Saharan dust source activation frequency map derived from MSG-SEVIRI IR-channels. Geophysical Research Letters, 34 (18): L18803 [DOI: 10.1029/2007GL030168]
-
Shenk W E and Curran R J. 1974. The detection of dust storms over land and water with satellite visible and infrared measurements. Monthly Weather Review, 102 (12): 830–837. [DOI: 10.1175/1520-0493(1974)102<0830:TDODSO>2.0.CO;2]
-
Xu H, Yu T, Gu X F, Cheng T H, Xie D H and Liu Q. 2013. The research on remote sensing dust aerosol by using split window emissivity. Spectroscopy and Spectral Analysis, 33 (5): 1189–1193. ( 徐辉, 余涛, 顾行发, 程天海, 谢东海, 刘倩. 2013. 利用分裂窗通道比辐射率遥感判识沙尘气溶胶研究. 光谱学与光谱分析, 33 (5): 1189–1193. )
-
Yan H, Hou Y Y, Liu G Q and He Y B. 2004. Dust detection using thermal infrared temperature difference. Journal of Remote Sensing, 8 (5): 471–474. [DOI: 10.3321/j.issn:1007-4619.2004.05.014] ( 延昊, 侯英雨, 刘桂清, 何延波. 2004. 利用热红外温差识别沙尘. 遥感学报, 8 (5): 471–474. [DOI: 10.3321/j.issn:1007-4619.2004.05.014] )
-
Zhan Y Z, Wang Z H and Zhang Z G. 2012. Wind fields in dust storm clear sky region from the FY-2E split window channels. Journal of Remote Sensing, 16 (4): 738–750. [DOI: 10.11834/jrs.20121208] ( 詹奕哲, 王振会, 张治国. 2012. FY-2E分裂窗晴空沙尘区导风初步研究. 遥感学报, 16 (4): 738–750. [DOI: 10.11834/jrs.20121208] )
-
Zhang P, Liu N M, Hu X Q and Dong C H. 2006. Identification and physical retrieval of dust storm using three MODIS thermal IR channels. Global and Planetary Change, 52 (1/4): 197–206. [DOI: 10.1016/j.gloplacha.2006.02.014]
-
Zhang Y L, Wang Y and Lu H Z. 2008. Block objects detection based on entropy of brightness. Systems Engineering and Electronics, 30 (2): 201–204. ( 张永亮, 汪洋, 卢焕章. 2008. 基于图像灰度熵的团块目标检测方法. 系统工程与电子技术, 30 (2): 201–204. )
-
Zheng X J, Lu W J and Luo J N. 2001. Research on the dust storm monitoring using multi-channel meteorological satellite data. Journal of Remote Sensing, 5 (4): 300–305. [DOI: 10.11834/jrs.20010410] ( 郑新江, 陆文杰, 罗敬宁. 2001. 气象卫星多通道信息监测沙尘暴的研究. 遥感学报, 5 (4): 300–305. [DOI: 10.11834/jrs.20010410] )
-
Zheng X J, Chen W M, Fang X and Luo J N. 2008. A method for estimating the amount of air borne sand over the land. Remote Sensing for Land and Resources (2): 35–38. [DOI: 10.6046/gtzyyg.2008.02.09] ( 郑新江, 陈渭民, 方翔, 罗敬宁. 2008. 利用NOAA卫星资料估算陆地沙尘量的方法. 国土资源遥感 (2): 35–38. [DOI: 10.6046/gtzyyg.2008.02.09] )
-
Zhou Y B, Bai J, Zhou Z H and Qi L L. 2014. Aerosol optical depth retrieval from FY-3A/MERSI for sand-dust weather over ocean. Journal of Remote Sensing, 18 (4): 771–787. [DOI: 10.11834/jrs.20143274] ( 周永波, 白洁, 周著华, 齐琳琳. 2014. FY-3A/MERSI海上沙尘天气气溶胶光学厚度反演. 遥感学报, 18 (4): 771–787. [DOI: 10.11834/jrs.20143274] )


