

|
收稿日期: 2016-06-17; 修改日期: 2016-07-18;
优先数字出版日期: 2016-09-25
基金项目: 国家自然科学基金(编号:41571337,41171267)
第一作者简介:
曾琪明(1964-), 男, 教授, 研究方向为雷达遥感。E-mail:qmzeng@pku.edu.cn
通讯作者简介: 章晓洁(1989-), 女, 博士研究生, 研究方向为微波遥感及应用。E-mail:zhxj2011@pku.edu.cn
中图分类号: TP79
文献标识码: A
文章编号: 1007-4619(2016)05-1151-10
|
摘要
利用星载重复轨道合成孔径雷达干涉测量InSAR技术获取数字高程模型(DEM),无法避免大气延迟效应的影响。InSAR大气校正的方法很多,但在DEM获取方面的大气校正研究却非常少见。本文研究星载重轨InSAR生产DEM时利用大气数值模式WRF(Weather Research and Forecasting model)得到的水汽结果进行大气校正的问题,重点讨论大气校正的策略,包括WRF模式设置和大气校正时机的选择,简要介绍了基于WRF运算结果的大气校正方法。利用TerraSAR-X数据进行实验,检验了所提出方法的有效性,证明了在干涉相位解缠前进行大气校正,比在相位解缠后进行的效果更好。将所提出方法应用于多基线、多波段InSAR干涉结果融合中,实验结果表明大气校正能够有效降低误差,对于相干性较高的地区效果更好。
关键词
大气校正 , DEM , WRF , InSAR , 多基线多波段
Abstract
Atmospheric delay effect is unavoidable and sometimes serious when using spaceborne repeat-pass synthetic aperture radar interferometry(InSAR) to generate Digital Elevation Models (DEMs). InSAR atmospheric correction methods come in various types. However, they are rarely used in InSAR DEM generation. The method based on atmospheric numerical models offersunique advantages.It can estimate atmospheric water vapor field at the SAR data acquisition time, and it is not affected by clouds. Therefore, this work studies the atmospheric correction strategy and method during the process of InSAR DEM generation based on the atmospheric numerical model called the Weather Research and Forecasting (WFR) model to improve the accuracy of the generated InSAR DEM. First, atmospheric correction strategies are discussed. These strategies include the proper settings of WRF Preprocessing System (WPS) to make the temporal and spatial scales of WRF results match those of SAR data, as well as the selection of a proper atmospheric correction timing to improve the accuracy of InSAR DEMs. One of the key issues of InSAR is phase unwrapping, and atmospheric correction removes the residual atmospheric phase from the interferometric phase of SAR data. Thus, there are two possible atmospheric correction timings:before phase unwrapping and after phase unwrapping. Atmospheric correction before phase unwrapping is theoretically helpful for phase unwrapping because the contribution of the atmosphere is removed. Atmospheric correction after phase unwrapping is commonly used in the field of Differential InSAR (D-InSAR), and its efficiency has been validated. The topographic phase in the process of D-InSAR is removed before phase unwrapping, which makes phase unwrapping easier than that in the process of InSAR DEM generation. A method of atmospheric correction based on WRF results is then introduced. The direct output results of WRF are not atmospheric water vapor field, which is needed to calculate the residual atmospheric phase. Thus, a method for transforming the direct output results of WRF to integrated water vapor (IWV) andthen transforming the IWV to the residual atmospheric phase is introduced. The original coordinates of the WRF results are transformed to the coordinates of SAR data. A workflow of atmospheric correction during the process of InSAR DEM generation is proposed. Experiments are carried outwith TerraSAR-X data to validate the efficiency of the proposed methods. The accuracies of the generated InSAR DEMs with residual atmospheric phase corrected at each possible timing are compared. The compared qualitative and quantitative results prove that the atmospheric corrections work at both timings and that the atmospheric correction before phase unwrapping performs well. However, the atmospheric correction before phase unwrapping may not always work or may worsen the accuracy of the DEM resultin regions where interferometric qualities are poor. The proposed methods are then applied to the fusion of multi-baseline and multi-frequency InSAR results, with the experimental resultsalso proving the efficiency of the methods and the good performance of atmospheric correctionin regions of good interferometric quality.
Key words
atmospheric correction , DEM , WRF , InSAR , multi-baseline multi-frequency
1 引言
合成孔径雷达干涉测量InSAR是获取数字高程模型DEM的重要手段。然而它的测量精度受多种误差的影响,如时空去相干、轨道误差、热噪声、大气延迟效应等(Zebker和Villasenor,1992)。由于大气本身的非均质性,电磁波信号在大气传播过程中发生折射,出现速度变化和路径弯曲,综合表现为斜距向传播路径的增加,即大气延迟效应(陈富龙等,2013)。削弱或去除大气延迟效应,即是大气校正。
由大气折射产生的SAR信号延迟主要分为天顶静力学延迟、天顶湿延迟、电离层延迟和液态水延迟,其中对InSAR大气延迟效应起主要作用的是天顶湿延迟,它主要受大气水汽含量变化的影响(陈富龙等,2013;Bevis等,1996)。早在1997年就已有研究指出,大气水汽含量变化对InSAR测量的高程误差的影响较大,并且与干涉基线的长度成反比关系(Zebker等,1997)。Hanssen (1998)对一系列ERS TanDEMSAR干涉图进行研究,评估了大气空间异质性对InSAR干涉相位测量值的影响,该研究表明,大气效应对干涉相位数值的影响较大,尤其是在雷雨等极端天气下相位误差将高达4个相位周期。目前在D-InSAR (Differential InSAR)形变监测中对大气校正的研究已经非常广泛(Li等,2004;Perissin等,2009;陈元洪等,2015;蒋廷臣等,2011),而在InSAR DEM获取中大气校正的相关研究却很少见。
目前国内外InSAR大气校正的方法主要分为两类:(1)基于SAR数据自身的校正法,主要有逐对分析法(pair-wise logic)、层叠法(phase stacking)和永久散射体法(PS-InSAR);(2)基于外部数据的校正法,主要有基于地面气象信息建模的校正方法、基于GPS数据的校正方法、基于空间辐射计测量法和基于大气数值模式(或称大气数值模型)的校正方法(崔喜爱等,2014)。这些方法中比较常用的几种是永久散射体法、基于GPS数据的校正方法、基于MERIS等水汽产品的校正方法和基于大气数值模式的校正方法。其中永久散射体法无需依赖于其他外部数据即可进行大气相位的估计和去除,但是它需要大量的SAR数据并依赖于一些假设,该方法在大气水汽含量高且SAR卫星轨道数据不精确的条件下大气相位去除往往失效(熊思婷,2014);基于GPS数据的校正方法精度较高,但是空间分辨率很低(Xu等,2006;陈元洪等,2015),且由于GPS观测与SAR成像时刻往往是不同步的,大气效应去除仍然会残留误差,另外由于GPS观测站点多位于城市地区,该方法在难以得到GPS观测数据、测图困难的山区无法使用;基于MERIS等水汽产品的校正方法在无云或少云地区可以得到较为理想的结果,但该数据受云量影响比较严重(Li等,2003;崔喜爱等,2013),且同样存在获得的水汽产品的时刻与SAR成像时刻不同步的问题;基于大气数值模式的校正方法虽然不受时间分辨率的限制,但是其空间分辨率较粗,目前的研究中模拟得到的大气水汽场的分辨率通常为千米级,远大于SAR数据的米级分辨率(崔喜爱,2013;云烨,2015)。
基于大气数值模式的校正方法虽然相对SAR数据的空间分辨率来说分辨率有限,但是由于它可以获得与SAR数据获取时刻同步的大气水汽场信息,并且不受云的干扰,具有其他方法不具备的优势,因此本文研究在星载重轨InSAR生产DEM时利用大气数值模式WRF(Weather Research and Forecasting model)得到水汽结果进行大气校正的策略和方法。
2 基于WRF的InSAR DEM获取中的大气校正策略
2.1 服务于InSAR的WRF设置策略
已有较多研究成果证明了WRF模式应用于InSAR大气校正的有效性(Yun等,2015;崔喜爱,2013;熊思婷,2014)。WRF模式模拟的水汽结果应用于InSAR有两个优势:(1)得到的水汽场和SAR数据获取时刻一致;(2)大气校正的空间尺度与InSAR数据和应用需求相匹配(云烨,2015)。WRF模式包含3个部分:预处理模块WPS(WRF Preprocessing System)、主模块和后处理模块。可通过合理地设置WPS参数来满足应用于InSAR的两个要求。
WPS模块可以设置模式运行的起止时间及时间积分步长,积分步长可精确到秒级,设置的原则是获得与SAR数据获取时刻尽可能接近的水汽结果。通常起止时间分别早于和晚于SAR数据获取时刻若干小时。将SAR数据获取时刻包含在积分时间段内,是为了利用该时刻前的模式预报结果来预测SAR数据获取时刻的水汽场,然后利用该时刻后的预报结果来对前面获得的结果进行修正,从而获得更加可靠的水汽场信息(NCAR,2015)。
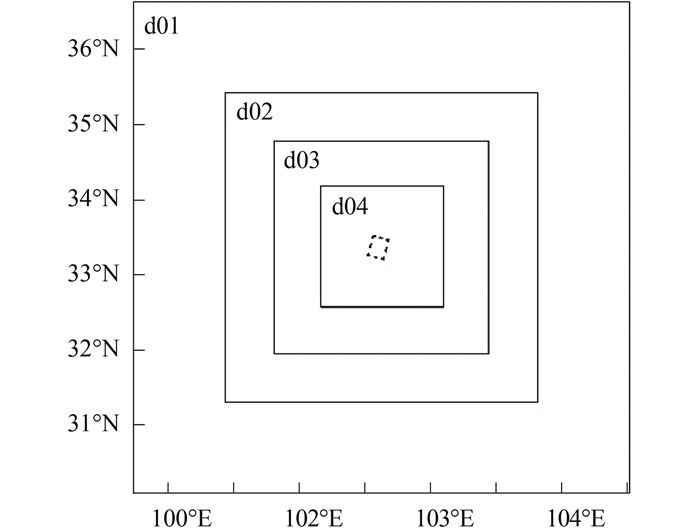
在空间尺度上,WRF模拟的水汽场的分辨率包括垂直分辨率和水平分辨率。其中垂直分辨率指垂直方向上大气的分层数,通常由所使用的初始场资料的层数决定;水平分辨率指WRF网格的粗细,通常为几公里到几十公里。后文中的分辨率都指的是水平分辨率。与常用的星载SAR数据的分辨率相比,WRF模式的水平分辨率是远远不够的。为使WRF模拟的水汽场分辨率与InSAR结果的分辨率尽可能接近,采用多层嵌套方式来提高WRF水汽场的分辨率。首先根据研究区SAR数据的地理覆盖范围来设定最外围的粗糙网格的分辨率和格点数,通常这一网格层的覆盖范围要远大于SAR数据的覆盖范围,然后设置子网格(细网格层)与母网格(粗网格层)格距之比来设置子网格的分辨率和格点数,其中格距比可以成偶数比或奇数比的关系(Yun,2015),需确保最细的网格层完全包含SAR数据的覆盖范围。
2.2 星载重轨InSAR生产DEM时的大气校正时机选择
基于WRF模式得到大气水汽场后,还需选择一个合适的时机来进行大气校正,即探讨在InSAR DEM获取过程中的哪个步骤去除大气效应对DEM结果的精度提高更有效。
由于在InSAR处理中相位解缠是关键,因此可能的去除时机有两个:干涉相位解缠前和干涉相位解缠后。图 1是InSAR DEM获取及大气校正的流程图,其中大气校正步骤引出的两个虚线箭头代表大气校正时机的两种可能性。初始去平后的相位包含各种频率成分,一般地形相位空间频率较高,而大气相位相对而言低频成分略多,大气延迟效应的影响比较复杂。理论上,如果在干涉相位解缠前去除大气残余相位,由于去除了大气的贡献,将有利于相位解缠的进行,从而提高获得的DEM质量。而在现有的D-InSAR形变监测研究中,由于通常是对去除地形相位的干涉结果进行解缠,相位解缠相对较容易,因此则多是在解缠后的形变相位中去除残余的大气相位,并且能够一定程度上改进形变测量精度。因此,本文分别从干涉相位解缠前(WRF1)和解缠后(WRF2)两个时机进行大气校正,以检验哪个时机对InSAR DEM的精度提高更有效。


2.3 基于WRF计算结果的InSAR大气校正方法
大气水汽场并非WRF模式计算输出的直接结果,需经过一系列后处理步骤才可用于InSAR大气校正,具体步骤见图 1右侧。首先,利用WRF计算结果中的水汽混合比(或称为比湿)、气体温度T、气压P等参量,根据式(1)计算出大气综合可降水量IWV(Integrated Water Vapor)。
| $IWV = \;\sum\limits_{k = 0}^N {\frac{{{P_k}}}{{{R_d}{T_{vk}}}}{\rm{QVAPO}}{{\rm{R}}_k}\Delta {z_k}} $ | (1) |
式中,QVAPOR(Water Vapor Mixing Ratio)是比湿,k为WRF模式的大气垂直层数,最大层数为N,Pk为第k层的大气压,Δzk为第k层的层高,Rd为干空气的比气体常数,Rd=287.0583J·K–1·kg–1,Tvk表示第k层的虚温,Tvk=(1+0.608×QVAPORk) Tk,Tk表示第k层的气体温度。再将IWV重采样至Lat/Lon地理坐标系下,然后将其转化到SAR的视线方向LOS(Line of Sight),并计算出两景SAR图像获取时刻的大气延迟相位差Δφatm。
| $\Delta {\varphi _{{\rm{atm}}}} = \frac{{4\pi \prod {\left( {IW{V_{date1}} - IW{V_{date2}}} \right)} }}{{\lambda \cos \theta {\rho _{{\rm{water}}}}}}$ | (2) |
式中,date1和date2表示两景SAR数据获取的时刻,∏是一个无量纲的转换因子,取值通常为6.0—6.5,在整幅SAR图像中基本保持不变,为简化运算,通常可以取平均值6.2参与运算(Li等,2003),ρwater为液态水的密度,λ为SAR的波长,θ为SAR的入射角。最后将得到的大气延迟相位差转换到雷达坐标系下,这一步骤可参照雷达图像的地理编码(Wegmuller,1999)来进行。大气校正的时机如前文讨论可能有两种选择,不论在哪个时机进行大气校正,只需在干涉相位中减去大气延迟相位即可,需注意date1和date2要与干涉处理的时间一致。
3 基于WRF的大气校正实验及应用
3.1 实验数据及预处理
实验采用一对TerraSAR-X条带模式数据用于干涉生成DEM,主、从图像获取日期分别是2012-10-01和2012-10-12。实验区位于四川省若尔盖县东部山区,地表植被覆盖密集,由于该地区高程差较大,约1 km,因此大气状况变化比较显著。
主、从SAR图像对应的WRF模式设置方案相同,以2012-10-12获取的SAR数据为例,数据获取时刻为2012-10-122311 UTC,对应的WRF模式起止时间分别为2012-10-121200 UTC和2012-10-130600 UTC,共18 h,积分步长为60 s。这里起止时间的设置依据WRF模式运行的初始气象场资料的时间。实验采用美国国家环境预报中心NCEP的FNL(Final Operational Global Analysis)全球分析资料中的数据集ds083.2来提供初始气象场,本实验中使用UTC时间2012-10-12T12:00、18:00以及2012-10-13T0:00和6:00的资料。图 2是本文设置的4层网格嵌套方案,采用的格距比为3,其中投影方式选择了适用于中纬度地区的兰伯特投影(NCAR,2015),从外到里4层网格的分辨率分别是27 km、9 km、3 km和1 km,格点数分别是28×28、52×52、106×106和181×181。
3.2 结果分析及讨论
将WRF模式的计算结果转化成雷达坐标系下的大气相位差(图 3),图 3中大气相位差看起来有网格效应,这是由于原始WRF结果的网格分辨率为1 km,比SAR数据的像元尺度粗很多,在将其转换到SAR数据对应的像元尺度的重采样过程中产生的。

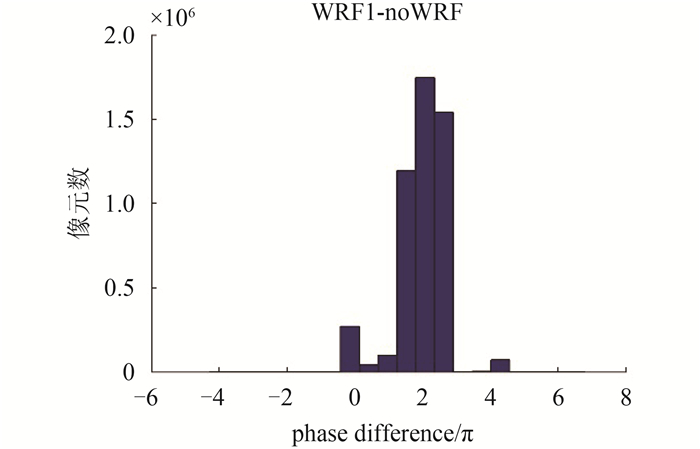
在不同时机进行大气校正,首先影响的是干涉相位,不同时机大气校正的解缠相位变化如图 4所示。忽略图 4(b)上相位跳跃的区域,结合图 4(a)(b)可以看出,二者整体相位差的趋势是一致的,说明无论解缠前后去除大气相位都能起到大气校正的作用。图 5为图 4(b)的相位差统计直方图,可以看出,在WRF1时机进行大气校正,除去明显的相位跳跃的区域,其余大部分区域的解缠结果与未进行大气校正或WRF2时机进行大气校正的结果相差整数个相位周期。
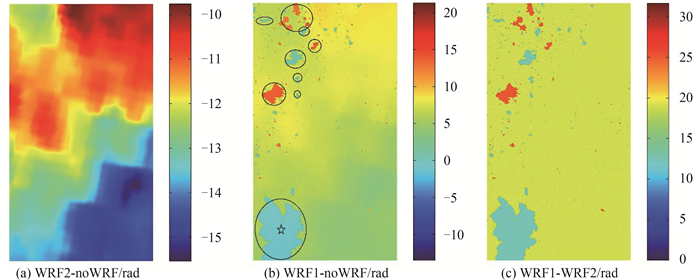
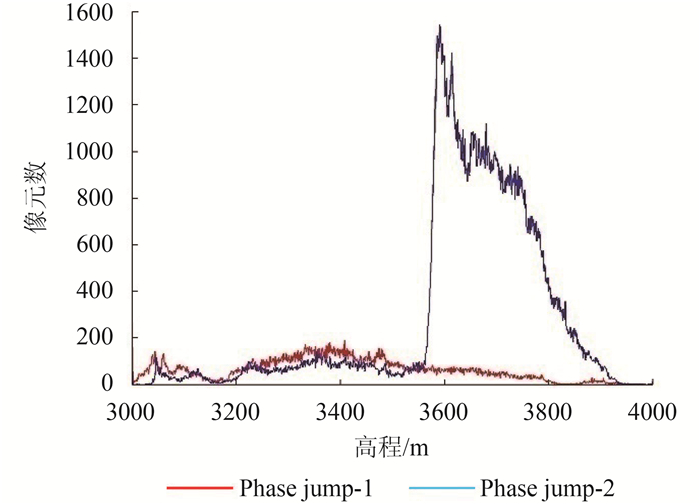
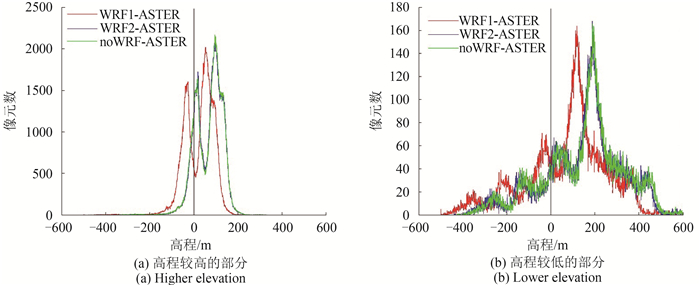
为证明在哪个时机进行大气校正效果更好,以ASTER GDEM为参考,检验不同时机大气校正得到的DEM(图 6)的高程精度。按照解缠相位差的情况,分情况比较高程结果。首先,从图 5可以看出,大部分相位差在π—3π之间,相位跳跃区域的相位差在–π—π和3π—5π之间,在图 4(b)里分别对应圈中的蓝色跳跃区域和红色跳跃区域。统计图 4(b)的相位跳跃区域对应的高程,结果如图 7所示。从图 7可以看出蓝色跳跃区域有明显的高程高低之分,结合图 4(b)和图 6可以发现,其中高程较高的区域对应的是图 4(b)中标注五角星的蓝色区域。因此,将相位跳跃区域分为蓝色高程较高的区域、蓝色高程较低的区域和红色区域进行高程精度的检验,统计结果见图 8和图 9。

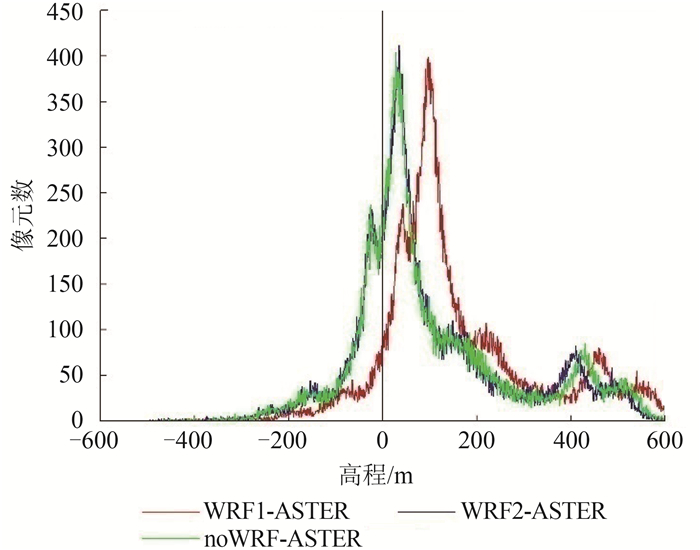
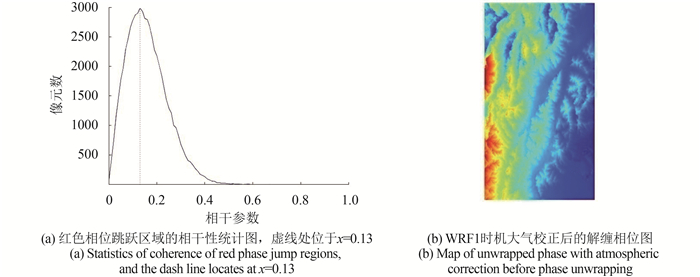
从图 8可以看出,蓝色相位跳跃区域对应的高程无论是高是低,在WRF1时机进行大气校正的结果是最接近ASTER GDEM的,高程精度得到了一定的改善。而图 9所示的红色跳跃区域结果却相反,在WRF1时机的结果反而偏离GDEM更多。红色跳跃区域集中在实验区的左上部,对该区域的相干性进行统计,结果如图 10(a)所示。可以看出,该区域的相干性非常低。结合WRF1时机得到的解缠相位结果(图 10(b))可以推理,由于该区域相干性非常低,导致该区域相位解缠的误差非常大,基本上失去了地形起伏的细节信息,以至于大气校正在那些区域无法起作用,甚至起了反作用。
对整个实验区范围进行大气校正后的高程精度的比较,根据相干性和原本未进行大气校正的DEM结果的高程误差大小,将整个实验区划分为不同质量区域进行比较。将相干性大于0.3,高程误差在一个高程模糊度内的区域视为质量较高的区域,其他区域视为质量较低的区域。对于不同质量区域,经过大气校正后,生成的DEM高程与GDEM的差异统计图如图 11所示。可以看出在WRF1时机进行大气校正,对高程的改正作用比较明显。

按照图 5中的相位差统计结果对全图范围的高程进行误差统计,结果汇总于表 1。可以看出91.87%的象元相位差在[π,3π)范围内,在WRF1时机的高程误差的均值和方差都小于在WRF2时机和未进行大气校正的情况。除了极少数相位差落在[3π,5π)和[5π,+∞)范围中的区域在WRF1时机的高程误差均值较大之外,其他相位差范围内也都是在WRF1时机的高程误差最小。因此,总体来说在相位解缠前进行大气校正的效果更好。
表 1 全图范围的高程误差统计表
Table 1 Statistics of height errors over the whole image/m
| 相位差 | (–∞,–π)(0.01%) | [–π,π)(6.46%) | [π,3π)(91.87%) | [3π,5π)(1.65%) | [5π,+∞)(0.01%) | |||||
| 统计值 | mean | std | mean | std | mean | std | mean | std | mean | std |
| WRF1 | –5.59 | 158.84 | 25.31 | 93.69 | 3.28 | 105.84 | 151.76 | 173.02 | 214.23 | 234.18 |
| WRF2 | 118.19 | 170.34 | 63.42 | 94.39 | 7.26 | 109.52 | 112.21 | 180.66 | 114.17 | 242.81 |
| noWRF | 156.79 | 192.83 | 84.50 | 105.60 | 39.30 | 121.88 | 195.81 | 196.07 | 204.12 | 258.28 |
| 注:相位差下方的百分比表示相应范围内的象元数占全图象元数的百分比。 | ||||||||||
3.3 大气校正在多基线、多波段干涉结果融合中的应用
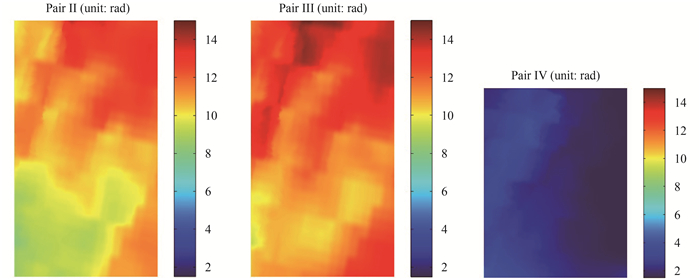
在InSAR获取高质量DEM的研究中,一个非常重要的方向是进行多基线、多波段InSAR结果的融合以提高DEM的质量(Eineder和Adam,2005;Zhang等,2016;花奋奋等,2014;庞蕾等,2010)。将本文提出的大气校正方法应用于基于扩展卡尔曼滤波的多基线多波段InSAR结果融合(Zhang等,2016),检验其对融合DEM结果的高程精度的影响。实验采用TerraSAR-X和Envisat ASAR数据进行融合,与Zhang等人(2016)所用数据和融合方法完全相同,只是对所有参与融合的干涉对都在相位解缠前进行了大气校正,图 12是干涉对Ⅱ 、Ⅲ和Ⅳ的大气残余相位。

为进行大气残余相位的比较,利用Zhang等人(2016)中的3对TerraSAR-X数据进行了层叠法(Sandwell和Price 1998;Sandwell和Sichoix,2000)实验,估计出的大气残余相位如图 13所示。该大气残余相位是从3对干涉对中估计出来的综合大气残余相位,而不像WRF模式能够获得每一对干涉对的大气相位差。与图 12或图 3相比,层叠法估计的大气残余相位的数值非常小,且不像图 12中能够表现出大气变化的趋势,而更像是从3对干涉对中估计出来的随机误差,虽然有一定的原因可能是由于参与层叠法估计的干涉对数目太少导致的。因此,相对层叠法来说,基于WRF模式的大气校正更加适用于星载重轨InSAR生产DEM。
参照Zhang等人(2016)中对参与融合的干涉结果的可靠程度划分,将DEM结果分不同质量区域进行高程精度的检验,同样以ASTER GDEM为参考,统计结果汇总于表 2。可以看出不同质量区域经过大气校正后的高程精度都有所提高,对于质量最高的Q0区域高程精度提高比较明显,且基本上可以认为参与融合的干涉结果的质量越高,该区域的高程精度提高越大,即大气校正的效果越好。
表 2 融合DEM的不同质量区域高程误差改进统计表
Table 2 Statistics of improvement of height errors of fused DEM divided into different quality regions
| /% | |||
| 不同质量区域 | 误差范围缩小 | 误差均值缩小 | 误差方差缩小 |
| Q0 | 5.84 | 24.07 | 2.00 |
| Q1 | 11.47 | 2.35 | 1.20 |
| Q2 | 3.31 | 1.82 | 1.52 |
| Q3 | 2.02 | 2.72 | 0.71 |
| Q4 | 0.81 | 0 | 0.16 |
| 注:Q0—Q4代表该区域参与融合的干涉结果的质量从高到低。 | |||
4 结论
利用WRF模式获得了SAR数据获取时刻的大气水汽场,并进行了大气校正实验。实验结果表明,无论在相位解缠前还是相位解缠后进行大气校正,都能对干涉DEM的高程精度起到一定的改善作用,且相对而言,在相位解缠前进行大气校正的效果更好;该方法也能够有效提高多基线、多波段InSAR结果融合获取的DEM的精度,基本上可以认为参与融合的干涉结果的质量越高,大气校正的效果越好,该区域的高程精度提高越大。但是对于SAR图像的干涉质量特别差的区域,由于难以获得正确的解缠结果,在相位解缠前进行大气校正有可能无法起到改善DEM精度的作用,甚至起反作用。
参考文献(References)
-
Bevis M, Chiswell S, Businger S, Herring T A , Bock Y.1996.Estimating wet delays using numerical weather analyses and predictions. Radio Science, 31 (3): 477–487. DOI: 10.1029/96RS00008.
-
Chen F L, Lin H , Cheng S L. Principles, Methods and Applications of Space-borne SAR Interferometry and Time-series Analysis. Beijing: Science Press 2013 : 22 -27. ( 陈富龙, 林珲, 程世来. 2013. 星载雷达干涉测量及时间序列分析的原理、方法与应用. 北京: 科学出版社 : 22 -27. )
-
Chen Y H, Guo J M, Chen P X , Huang C J.2015.Reduction of atmospheric effects on InSAR interferograms based on CORS. Journal of Geodesy and Geodynamics, 35 (6): 1026–1030. DOI: 10.14075/j.jgg.2015.06.025. ( 陈元洪, 郭际明, 陈品祥, 黄长军. 2015. 基于CORS的DInSAR大气延迟校正方法研究. 大地测量与地球动力学, 35 (6): 1026–1030. DOI: 10.14075/j.jgg.2015.06.025. )
-
Cui X A. The Removal of the Atmospheric Water Vapor Effects in Repeat-Pass InSAR Measurements. Beijing: Peking University 2013 . ( 崔喜爱. 2013. 重轨星载InSAR大气水汽效应去除研究. 北京: 北京大学 . )
-
Cui X A, Zeng Q M, Tong Q X, Jiao J , Liang C R.2013.InSAR atmospheric effects analysis of ASAR image mode products. Acta Scientiarum Naturalium Universitatis Pekinensis, 49 (4): 643–649. ( 崔喜爱, 曾琪明, 童庆禧, 焦健, 梁存任. 2013. 条带式InSAR大气效应影响分析研究. 北京大学学报(自然科学版), 49 (4): 643–649. )
-
Cui X A, Zeng Q M, Tong Q X, Jiao J , Liang C R.2014.Overview of the atmospheric correction methods in repeat-pass InSAR measurements. Remote Sensing Technology and Application, 29 (1): 9–17. DOI: 10.11873/j.issn.1004-0323.2014.1.0009. ( 崔喜爱, 曾琪明, 童庆禧, 焦健, 梁存任. 2014. 重轨星载InSAR测量中的大气校正方法综述. 遥感技术与应用, 29 (1): 9–17. DOI: 10.11873/j.issn.1004-0323.2014.1.0009. )
-
Eineder M , Adam N.2005.A maximum-likelihood estimator to simultaneously unwrap, geocode, and fuse SAR interferograms from different viewing geometries into one digital elevation model. IEEE Transactions on Geoscience and Remote Sensing, 43 (1): 24–36. DOI: 10.1109/TGRS.2004.838389.
-
Hanssen R F.1998.Atmospheric Heterogeneities in ERSTandem SARInterferometry.Delft, The Netherlands:Delft University Press
-
Hua F F, Zhang J X, Huang G M , Wang M M.2014.Improved maximum likelihood height estimation method for multi-baseline InSAR elevation inversion. Science of Surveying and Mapping, 39 (3): 13–18. ( 花奋奋, 张继贤, 黄国满, 王萌萌. 2014. 面向多基线干涉SAR高程反演的改进最大似然高程估计方法. 测绘科学, 39 (3): 13–18. )
-
Jiang T C, Li T , Liu J N.2011.Study on ScanSAR interferometry for monitoring large scale earthquake. Geomatics and Information Science of Wuhan University, 36 (4): 490–494. ( 蒋廷臣, 李陶, 刘经南. 2011. 星载宽幅雷达干涉监测大范围地震形变技术研究. 武汉大学学报(信息科学版), 36 (4): 490–494. )
-
Li Z H, Muller J P , Cross P.2003.Comparison of precipitable water vapor derived from radiosonde, GPS, and moderate-resolution imaging spectroradiometer measurements. Journal of Geophysical Research, 108 (D20): DOI: 10.1029/2003JD003372.
-
Li Z W, Ding X L , Liu G X.2004.Modeling atmospheric effects on InSAR with meteorological and continuous GPS observations:algorithms and some test results. Journal of Atmospheric and Solar-Terrestrial Physics, 66 (11): 907–917. DOI: 10.1016/j.jastp.2004.02.006.
-
NCAR.2015.ARW users guide v3[EB/OL].[2015-10-12].http://www2.mmm.ucar.edu/wrf/users/docs/user_guide_V3/contents.html
-
Pang L, Zhang J X , Fan H D.2010.Progress and tendency of multibaseline synthetic aperture radar interferometry technique. Acta Electronica Sinica, 38 (9): 2152–2157. ( 庞蕾, 张继贤, 范洪冬. 2010. 多基线干涉SAR测量技术发展与趋势分析. 电子学报, 38 (9): 2152–2157. )
-
Perissin D, Pichelli E, Ferretti R, Rocca F , Pierdicca N.2009.The MM5Numerical Model to Correct PSInSAR Atmospheric Phase Screen. Frascati, Italy :
-
Sandwell D T , Price E J.1998.Phase gradient approach to stacking interferograms. Journal of Geophysical Research-Solid Earth, 103 (B12): 30183–30204. DOI: 10.1029/1998JB900008.
-
Sandwell D T , Sichoix L.2000.Topographic phase recovery from stackeders interferometry and a low-resolution digital elevation model. Journal of Geophysical Research-Solid Earth, 105 (B12): 28211–28222. DOI: 10.1029/2000JB900340.
-
Wegmuller U.1999.Automated terrain corrected SAR geocoding//Proceedings of 1999 IEEE International Geoscience and Remote Sensing Symposium (IGARSS).Hamburg, Germany:IEEE:1712-1714 [DOI:10.1109/IGARSS.1999.772070]
-
Xiong S T. Improvement of PS-InSARBased on Atmospheric Correction by Using WRF Model. Beijing: Peking University 2014 . ( 熊思婷. 2014. 基于WRF大气校正的PS-InSAR方法改进. 北京: 北京大学 . )
-
Xu C J, Wang H, Ge LL, Yonezawa C , Cheng P.2006.InSAR tropospheric delay mitigation by GPS observations:a case study in Tokyo area. Journal of Atmospheric and Solar-Terrestrial Physics, 68 (6): 629–638. DOI: 10.1016/j.jastp.2005.11.010.
-
Yun Y. Mitigating Atmospheric Effects in Repeat-Pass Spaceborne InSAR Measurement Through Data Assimilation and Numerical Simulations with WRF Model. Beijing: Peking University 2015 . ( 云烨. 2015. 基于WRF和数据同化的星载重轨InSAR大气校正研究. 北京: 北京大学 . )
-
Yun Y, Zeng Q M, Green B W , Zhang F Q.2015.Mitigating atmospheric effects in InSAR measurements through high-resolution data assimilation and numerical simulations with a weather prediction model. International Journal of Remote Sensing, 36 (8): 2129–2147. DOI: 10.1080/01431161.2015.1034894.
-
Zebker H A , Villasenor J.1992.Decorrelation in interferometric radar echoes. IEEE Transactions on Geoscience and Remote Sensing, 30 (5): 950–959. DOI: 10.1109/36.175330.
-
Zebker H A, Rosen P A , Hensley S.1997.Atmospheric effects in interferometric synthetic aperture radar surface deformation and topographic maps. Journal of Geophysical Research-Solid Earth, 102 (B4): 7547–7563. DOI: 10.1029/96JB03804.
-
Zhang X J, Zeng Q M, Jiao J , Zhang J F.2016.Fusion of space-borne multi-baseline and multi-frequency interferometric results based on extended Kalman filter to generate high quality DEMs. ISPRS Journal of Photogrammetry and Remote Sensing, 111 : 32–44. DOI: 10.1016/j.isprsjprs.2015.11.005.


