

|
收稿日期: 2016-05-19; 修改日期: 2016-06-14;
优先数字出版日期: 2016-09-25
基金项目: 国家自然科学基金(编号:41590851,41301528,41471388)
第一作者简介:
邸凯昌(1967-), 男, 研究员, 研究方向为行星遥感制图与导航定位。E-mail:dikc@radi.ac.cn
通讯作者简介: 刘召芹(1973-), 男, 副研究员, 研究方向为行星遥感制图与导航定位。E-mail:liuzq@radi.ac.cn
中图分类号: TP701
文献标识码: A
文章编号: 1007-4619(2016)05-1230-13
|
摘要
对月球探测任务、月球遥感制图技术与产品进行综述。从1958年开始,全世界已开展126次(其中70次成功)月球探测工程任务,其中月球遥感制图是其必需的基础性工作。由于月球环境的特殊性,其遥感制图技术与对地观测制图相比具有很大的挑战和更大的难度。目前,中国嫦娥二号轨道器获取的7 m分辨率立体影像是覆盖全月球分辨率最高的立体影像数据,美国月球侦察轨道器LRO任务的激光雷达高度计LOLA数据是精度和密度最高的激光测高数据,LRO NAC影像的分辨率最高(0.5-2 m)但未覆盖全球。在各个探测任务中,基于月球遥感数据和摄影测量技术,已经制作了大量的全球及区域的影像拼图、正射影像图和数字高程模型等制图产品。对月球遥感制图技术发展进行展望,探讨了利用国际多探测任务数据建立新一代控制网和进行精细制图的必要性及技术思路。
关键词
月球探测 , 月球制图 , 遥感数据 , 摄影测量技术
Abstract
This paper presents a review of lunar exploration missions and techniques, as well as the products of lunar mapping using remote sensing data. Since 1958, 126 lunar exploration missions have been carried out, and 70 of these missions were successful. Lunar exploration missions can be broadly classified into unmanned and manned missions, with unmanned probes mainly using an orbiter, a lander, and a rover. Lunar surface mapping using remote sensing data is one of the fundamental tasks in these missions and is critical to support other science or engineering tasks. Lunar mapping is more challenging and difficult compared with Earth mapping because orbit and attitude determination is of relatively low accuracy, a global navigation satellite system is lacking, obtaining ground truth for geometric and radiometric calibration is difficult, and the lunar surface is a desolated environment with poor image texture. A vast amount of remote sensing data have been acquired from successful missions. The two primary data sources for lunar mapping are orbital optical images and laser altimeter data. Among the optical images, the Chang'E-2 stereo images cover the entire moon surface with 7 m resolution, and the narrow-angle images of the lunar reconnaissance orbiter camera offer the highest spatial resolution of up to 0.5 m but with limited coverage. Among the laser altimeter data, the lunar orbiter laser altimeter data of the lunar reconnaissance orbiter show the highest precision and density. Orbital remote sensing data provide facilitate global and regional mapping with medium and high resolutions, where slander and rover images offer the highest resolution (up to millimeter level) for the detailed mapping of the landing site and traversing area. Photogrammetric techniques, including geometric sensor modeling, image block adjustment, stereo image matching, space intersection for 3D position computation, and DEM and orthophoto generation, have been developed by the planetary mapping community for lunar mapping from orbiter, lander, and rover images. The rigorous sensor models of orbital images are usually established by collinearity equations with interior and exterior orientation parameters. Bundle adjustment is a rigorous block adjustment method that simultaneously solves exterior orientation parameters and 3D ground points with high accuracy and consistency. A generic geometric model, with a rational function model as the representative, has been investigated and used in lunar mapping. Unlike rigorous sensor models, rational function models are simple and independent of sensors. It is particularly advantageous for integrated mapping using multiple images from the same orbiter or different orbiters. Global image mosaics and global DEM have been produced by mission teams with resolutions ranging from tens to hundreds of meters. Sub-meter to meter resolution regional maps have been produced for scientific investigation orthe selection of landing sites. Centimeter resolution maps have been generated from lander or rover images to support in-situ investigations and rover traverse planning at landing sites. Some future research directions of lunar mapping using remote sensing data are discussed at the end of the paper, along with the construction of a new-generation lunar global control network using the newly acquired multi-mission data, fine-resolution lunar mapping using multi-mission multi-coverage images, automated processing of huge amount of data, lunar mapping standards, data sharing, and international cooperation.
Key words
lunar exploration , lunar mapping , remote sensing data , photogrammetric technique
1 引言
月球探测对于认识地月系统乃至太阳系的形成与演化、对于开发和利用月球资源具有重大的科学意义和战略意义(欧阳自远,2005)。从20世纪50年代末开始,国际上已开展大量月球探测工程任务;21世纪初,国际第二次探月高潮拉开序幕。中国的无人月球探测计划于2004年正式启动,分为“绕”、“落”、“回”3个阶段,目前已胜利完成前两个阶段和第3阶段试验器的任务(欧阳自远等,2010;叶培建等,2013)。
月球探测方式可分为无人探测和载人登月探测两大类,无人探测主要有轨道器(人造卫星)、着陆器和巡视器(月球车)3种探测方式。轨道器环绕月球运行,所搭载的光学相机、光谱仪和激光高度计等科学仪器对月球进行宏观的全球性探测。在选定的具有科学意义和工程安全性的区域进行着陆和巡视探测,获取更精细的就位探测结果,并为轨道器数据标定和验证提供参考数据,进一步还可采样返回地球。由于载人登月巨大的技术风险和经费开支,无人探测模式目前仍然是月球探测的主要方式。
月球遥感制图是月球科学研究和探测工程任务必需的基础性工作,是获取形貌和构造信息的基本手段,对于研究月球的形貌特征、地质构造及其演化历史具有重要的科学意义(Greeley和Batson,1990;Kirk等,2012);同时,探月工程任务科学目标的制定、着陆区选择、着陆后探测目标的选择及高效安全探测等都有赖于遥感制图的成果及技术支撑(邸凯昌等,2015)。近年来,郭华东院士提出了地球宏观科学现象的月基观测研究计划,并得到了国家自然科学基金重大项目的资助。2015年,欧空局局长Johann-Dietrich Wörner提出称为“月球村”的国际合作月球基地计划。无论是月基地球观测的选址,还是月球基地的选址及建设,都离不开月球遥感制图技术特别是高精度3维制图技术的支持。由于月球卫星轨道和姿态测量精度低、难以获得控制点、无卫星导航定位设施、表面环境荒芜等受限条件,月球遥感制图与对地观测制图相比具有很大的挑战和更大的难度。
本文对国际国内月球探测任务的月球遥感制图技术研究及制图成果进行综述,并对其发展趋势和重要研究方向进行探讨。需要说明的是,本文所综述的遥感制图聚焦在测绘制图,其产品包括影像拼图、正射影像图、数字高程模型等,不涉及月球地质填图、地貌图制作等内容。
2 月球探测概述
2.1 20世纪六七十年代的月球探测
1958年—1976年,人类掀起第1次探月高潮,美国和前苏联共发射了108颗月球探测器,其中成功或部分成功52颗,实现了6次载人登月,12名宇航员完成月球漫步,获得了382 kg月球样品和海量科学数据(欧阳自远,2005)。
前苏联发射的月球探测器包括月球(Luna)系列(1959年—1976年)、宇宙(Cosmos)系列(1965年—1969年)、探测器(Zond)系列(1965年—1970年)等;其中Luna 2号实现了人类第1次月球探测并成功撞击月球表面,Luna 3号第1次拍摄了月球影像,并且获得了首张月球背面影像(Reeves,1994);Luna 9号实现了月球探测第1次软着陆,Lunar 16号第1次实现月面采样返回,Luna 17号实现第1次月面巡视探测(Kirk等,2008)。
美国发射的月球探测器包括先驱者(Pioneer)系列(1958年—1959年)、徘徊者(Ranger)系列(1961年—1965年)、月球轨道器(Lunar Orbiter)系列(1966年—1967年)、勘探者(Surveyor)系列(1966年—1968年)以及阿波罗(Apollo)系列(1967年—1972年)等。其中Lunar Orbiter是美国为阿波罗载人飞船登月做准备发射的月球探测器,主要科学目标是在绕月轨道上拍摄月表地形照片,为阿波罗飞船选择最安全的着陆点。自1966-08-10—1967-08-01,美国共发射5颗月球轨道器,轨道器1—3号围绕月球赤道飞行,轨道器4—5号运行于月球极地轨道。轨道器1号拍摄了地球在月球表面升起的地升景象;轨道器4号拍摄了整个月球正面与95%的月球背面;轨道器5号拍摄了整个月球背面,并获得36处预选着陆点的中等分辨率和高分辨率影像;最终绘制了覆盖月表99%区域、平均分辨率约60 m的月球地图集,选出了10个可供阿波罗飞船着陆的候选登月点(Bowker和Hughes,1971)。
Apollo探月是美国于20世纪60年代至70年代初实施的载人登月工程,是美国国家航空航天局(NASA)执行的迄今为止最庞大的月球探测任务,主要目标是揭示月球的表面特性、物质化学成份、光学特性,探测月球重力、磁场、月震等,进行载人登月取样等科学研究。1966年—1968年,NASA进行了6次不载人飞行试验,为载人登月飞行做准备;1968年—1969年,Apollo 7—10号飞船进行了载人飞行试验,Apollo 10号在环月轨道上成功飞行;1969年7月20日,Apollo 11号飞船实现了首次载人登月,宇航员阿姆斯特朗在月球表面留下了人类第1个脚印;1969-11—1972-12,Apollo 12、14—17号相继进行了载人登月取样,共带回381.7 kg的月球岩石标本(Grabois等,2011)。
2.2 20世纪90年代的月球探测
1976年—1994年是月球探测的宁静期,期间世界上没有进行过任何成功的月球探测活动(欧阳自远,2005)。20世纪90年代月球探测活动开始复苏,美国于1994年和1998年分别发射了克莱门汀(Clementine)和月球勘探者(Lunar Prospector)号月球探测器。
克莱门汀卫星是美国弹道导弹防御组织(BMDO)和NASA联合执行的月球探测项目,于1994年1月25日发射,主要科学目标是在月球极地轨道探测月球地貌、水冰、重力和磁场等。它携带的科学仪器包括紫外/可见光相机(UV/VIS)、近红外相机(NIR)、长波红外相机(LWIR)、高分辨率摄影机(HIRES)、带电粒子望远镜(CPT)、激光雷达系统(LIDAR)和两台星跟踪器相机。Clementine光谱波段从紫外、可见光、近红外到长波红外共11个波段,被广泛运用于月表矿物元素成分分析,紫外/可见光相机平均空间分辨率200 m;HIRES包含一个影像增强仪和一个CCD成像器,可获取7—20 m分辨率影像,LIDAR用于在月球测绘轨道上进行高度测量,垂直分辨率40 m,水平点分辨率100 m,覆盖了月球南北纬60°的范围(Nozette等,1994)。月球勘探者由NASA于1998年1月7日发射,在距月面100 km高的极地轨道飞行,主要科学目标是探测月表物质组成、重力场和磁场,寻找月球存在冰或水的证据。1999年7月31日,探测器撞击月球南极点附近的舒梅克环形山,探测任务结束。
2.3 21世纪的月球探测
21世纪初,国际第2次探月高潮拉开序幕,已经发射的月球探测器主要包括欧盟的智慧一号(SMART-1)、日本的月亮女神(SELENE)、印度的月船一号(Chandrayaan-1)、美国的月球侦察轨道器(LRO)、圣杯探测器(GRAIL)和月球大气与尘埃环境探测器(LADEE)、中国的嫦娥一号(Chang’E-1)、嫦娥二号(Chang’E-2)和嫦娥三号(Chang’E-3)。
SMART-1由欧洲空间局(ESA)于2003年9月27日发射,它是首颗由太阳能推动的霍尔效应推进器作为动力源的月球探测器,配置7类载荷,主要科学目标是测试太阳能离子推进器,探测月球形状、矿物、化学组成和外部环境等。日本的SELENE包括一颗主轨道器和两颗子卫星,搭载14种有效载荷,于2007年9月14日发射,2009年6月11日受控撞击月球表面,其科学目标包括进行全月球的高精度观测、研究月球的起源和演变、开发未来月球探测技术(Kato等,2008)。印度的Chandrayaan-1包括一颗月球环绕器和一颗硬着陆器,携带11台有效载荷,2008年10月22日在印度斯利哈里柯塔岛成功发射,2008年11月14日成功释放硬着陆器,着陆于月球南极附近(Goswami和Annadurai,2009),2009年8月29日结束探月任务。美国的LRO于2009年6月19日发射,携载7大科学仪器,主要任务是完成美国的外层空间探索计划,具体科学目标是探测月球极区的光照条件,测绘全月面地形,寻找未来登月点的位置,勘测月球的潜在资源(Chin等,2007);其中携带的光学窄角相机由两台700 mm焦距、视场角2.85°的全色相机组成,可以获得月面0.5 m分辨率的全色影像,两台组合地面幅宽达5 km(Robinson等,2010)。GRAIL的主要目标是获取迄今为止精度最高的月球重力场数据,探测月球的内部结构和演化历史,采用GRAIL A和GRAIL B双子卫星探测器系统,2011年9月10日发射,二者距离月表的标称高度为50 km,彼此之间的平均距离为200 km,2012年12月17日在地面控制下先后撞击月球北极附近的一座山峰。LADEE于2013年9月7日发射,其科学目标是探测月球大气层的散逸层和周围的尘埃。
中国的Chang’E-1搭载8种有效载荷,其中用于3维制图的三线阵推扫式CCD立体相机能够同时获取宽度为512像素的前视、下视和后视图像,焦距23.334 mm,在200 km圆轨道高度上地面分辨率为120 m(Li等,2010a)。Chang’E-1主要科学目标是获取月球表面的3维立体影像、分析月球表面元素含量和物质类型的分布特点、探测月壤特性和地月空间环境(Ouyang等,2008),于2007年10月24日发射,在轨运行495天,共取得1.39 TB的原始科学数据;2009年3月1日,Chang’E-1受控撞击月球的丰富海区域。Chang’E-2于2010年10月1日发射,主要目标是验证与月面软着陆相关的关键技术,试验新的奔月轨道,降低探月工程二期的技术风险;在科学上的主要目标是获取月表高分辨率的立体图像,对月球着陆区和其他重点区域进行精细测绘,精细探测月面的元素丰度与分布,评估月壤厚度和氦-3资源,探测地月空间环境(欧阳自远,2010)。Chang’E-2携带的两线阵CCD立体相机由两条宽度为6144像素的线阵组成,相机焦距144.3 mm;任务期间CCD立体相机获得了月球虹湾地区的35轨空间分辨率约为1.3 m的局域立体图像,以及7 m空间分辨率、100%覆盖的全月立体图像(赵葆常等,2012),在全面实现了既定的工程目标和科学探测任务后,于2011年6月9日飞离月球轨道进行深空探测,8月25日受控进入距离地球约150万km的拉格朗日L2点的环绕轨道,进行扩展试验。2012年12月13日,Chang’E-2成功飞抵距地球约700万km远的深空,首次实现对图塔蒂斯(Toutatis)小行星的飞越探测,星载监视相机对小行星进行了光学成像。Chang’E-3的科学目标是月表形貌与地质构造调查、月表物质成分和可利用资源调查、地球等离子体层探测和月基光学天文观测;于2013年12月2日发射,14日成功软着陆于月球雨海,15日实现了巡视器与着陆器的两器分离和互拍,月球车在月面完成了114.8 m的巡视探测(Liu等,2015)。
未来几年计划进行月球探测的有中国的嫦娥四号和五号、美国的SLS-Orion(EM-1,EM-2)、俄罗斯的Luna25-29系列、日本的SELENE-2和的SELENE-3等(http://www.lpi.usra.edu/lunar/missions/)。嫦娥五号计划于2017年发射实现采样返回、嫦娥四号计划于2018年发射实现月面背面巡视探测;由谷歌赞助的Google Lunar X Prize计划于2017年实现月面着陆巡视探测;俄罗斯的Luna-Glob计划于2024年发射,在轨道器上发送十几个大小不等的穿透器,记录月震和小天体撞击事件,研究月球的内部结构与演化。
3 月球遥感制图技术与产品
3.1 月球遥感制图技术
(1) 月球坐标系统建立。月球坐标系统的建立是进行月球遥感制图的基础。月球的全球坐标系可以分为惯性坐标系和月固坐标系两类,惯性坐标系用于确定飞行器的位置和姿态,月固坐标系用于对月球面特征进行定位和制图。J2000月心惯性坐标系又称J2000月心平地球赤道坐标系,以月球质心为原点,X、Y、Z三轴指向分别平行于J2000地心惯性坐标系X、Y、Z三轴指向的右手直角坐标系。月固坐标系又分为月固直角坐标系和月固大地坐标系两种。月固直角坐标系中较为常用的是平地球/极轴坐标系常用(GSFC,2008)。该坐标系以月球质心为原点,月球赤道面为基本平面,X轴在基本平面内指向本初子午线(由平均地球方向定义)与基本平面的交点,Z轴垂直于基本平面指向北极,Y轴与X和Z轴组成右手直角坐标系。月固大地坐标系(又称月球大地坐标系)以月球质心为原点,月球赤道面为基本平面,用大地经度、大地纬度和大地高表示月面点位置的坐标系。
月固坐标系和惯性坐标系间的关系可由月球旋转参数(Archinal等,2011)确定。J2000地心惯性坐标系(EJ2000)和J2000月心惯性坐标系(LJ2000)的坐标轴变换关系则可由JPL公开发表的历表(Folkner等,2009)中参数进行转换。
(2) 控制网建立。月球全球控制网即分布在月球全球表面的具有精确3维坐标的控制点集,它们是后续月球探测制图的控制基准,也是对月球进行形貌研究的重要基础数据。与地球上建立测量控制网主要采用地面高精度测量控制点的方法不同,月球全球控制网主要利用轨道器影像及激光高度计数据通过摄影测量整体平差的方法解算影像连接点3维坐标及影像姿态的改正数,这些计算出精确3维坐标的影像连接点也就是全球控制网的控制点。
目前国际上通用的月球全球控制网是统一月球控制网2005 ULCN 2005(Unified Lunar Control Network 2005)。在ULCN 2005之前,月球全球控制网主要有1994年建立的统一月球控制网(ULCN)和1997年建立的克莱门汀月球控制网CLCN(Clementine Lunar Control Network)。ULCN 2005是ULCN和CLCN的集成与升级,它包含了43866幅克莱门汀影像以及早期的阿波罗、水手10号、伽利略号等影像,包含272931个3维控制点(影像中的连接点),采用摄影测量区域网平差的方法解算影像姿态的改正值及影像连接点的3维坐标,像方均方根误差0.9像素,最大残差6.4像素,其水平精度为100 m至几km,垂直精度约100 m,这是当时国际上最大规模的行星控制网(http://pubs.usgs.gov/of/2006/1367/ULCN2005-OpenFite.Pdf)。ULCN 2005控制网解算的输入(影像连接点坐标)输出(控制点3维坐标及影像姿态)文件、迭代解算过程中的残差文件、控制网派生出的16像素/度的月球全球DEM等,可以从USGS网站上(http://pubs.usgs.gov/of/2006/1367/)下载。
(3) 摄影测量几何模型与区域网平差技术。遥感影像成像几何模型是描述影像上的点与地面点之间的坐标转换关系的模型,是进行影像高精度制图的基础。月球轨道器的严格几何模型一般采用基于共线方程的数学模型,其建立过程分为内定向和外定向。内定向指的是由各CCD影像上的像点坐标(像点行列号)转换成以像主点为中心的焦平面坐标的过程;外定向则是指由影像焦平面坐标经一系列坐标转换得到月固坐标系下地面点坐标的过程,其间需要确定每一行影像的外方位元素,一定范围内影像行的外方位元素可以用数学模型(比如多项式模型)来拟合(邸凯昌等,2015)。轨道器影像的严格几何模型有明确的物理意义,便于做理论分析和高精度处理,但建立轨道器的影像严格几何模型的过程一般比较复杂,由于影像传感器的设计细节差异,往往针对每一个传感器都要建立各自的严格几何模型(特别是内定向模型)。
以有理函数模型RFM(Rational Function Model)为代表的通用几何模型在对地观测领域已得到了研究并广泛应用于高分辨率影像的几何处理(Tao和Hu,2001;Di等,2001,2003;Grodecki和and Dial,2003)。有理函数模型具有拟合精度高、通用性好、应用方便等优点。研究有理函数模型对行星轨道器影像的适用性是十分必要的。近年来,中国科学院遥感与数字地球研究所行星遥感团队近年来对RFM在月球和火星的适用性和精度进行了一系列研究(Liu和Di,2011;Liu等,2014;刘一良,2014)。
通过建立行星轨道器影像的几何模型并进行前方交会解算,可以建立起轨道器影像的地面3维模型,并可以基于共线方程的原理,将地面3维点坐标沿摄影光线反投影到像方,可以得到像方反投影坐标。理想情况下,前方交会时光线会严格相交于地面上一点,反投影坐标与像点量测坐标也会严格一致。但由于存在轨道误差、姿态误差、时间误差、相机模型误差等情况,会导致反投影残差。因此需采用平差方法对轨道姿态数据、相机内参数等进行改正,从而实现轨道器影像的高精度制图。
目前针对轨道器遥感影像的区域网平差处理主要以共线方程的严密成像几何模型为基础,建立各传感器的成像参数精化模型,并辅助激光高度计数据、DEM等已有的地形产品进行最优参数估计的平差解算,由于平台及传感器的不同,平差方法与平差细节也各有差异。另外利用有理函数模型为基础的区域网平差处理也有相关的报道。
Haruyama等人(2009)通过对多轨道影像间的偏移进行改正,将SELENE(KAGUYA)月球探测器上携带的一台地形相机(TC)影像的相对误差由100 m降低到10 m左右,生成了无控制的10 m分辨率的全月DTM,通过与激光高度计(LALT)数据对比及平坦区域高差控制等约束条件对TC相机的CCD探测器的畸变模型和相机镜头安装角进行校正,使TC相机生成的DTM与LALT数据间的一倍中误差降低到3.2 m(Haruyama等,2012)。Radhadevi等人(2013)建立了月船一号(Chandrayaan-1)地形制图相机TMC(Terrain Mapping Camera)影像的严格成像几何模型,对300000行轨道和姿态数据分别进行三阶和九阶多项式拟合,并对姿态数据多项式的常数项和一次项系数进行了精化,采用基于区域的互相关方法,由粗到精的匹配策略、最小二乘方法进行影像匹配,并通过调整外方位元素进行区域网平差,消除了三线阵影像之间的不一致性,生成立体像对的DEM。而Sivakumar等人(2012)对4000(列)×15000(行)TMC影像使用有理函数模型生成DEM,并进行光束法区域网平差,使像方误差达到3—5像素,与美国LRO任务中的激光高度计LOLA (Lunar Orbiter Laser Altimeter)数据比较,采样点高差基本在百米以内,并生成DOM等地形产品。亚利桑那州立大学(ASU),NASA艾姆斯研究中心(Ames),亚利桑那大学(UA),以及美国地质调查局(USGS)使用ISIS软件和SOCET SET软件(DeVenecia等,2007),在对LRO飞行器窄角(NAC)相机影像进行辐射校正后,通过光束法平差来更新位置、速度、姿态角等参数,一对窄角相机立体影像进行平差得到像方误差为0.25—0.4个像素,多对立体影像同时平差整体残差小于1个像素;俄亥俄州立大学(OSU)使用Orbital Mapper软件和Leica摄影测量软件进行处理,通过视准轴标定、摄影测量光束法平差及地形编辑将LRO NAC影像生成高精度的地形产品(Li等,2010;Li,2009);德国宇航中心和柏林工业大学(DLR/TUB)使用内部软件进行了影像处理。Tran等人(2010)在对NAC影像进行准核线校正和卫星颤振(jitter)处理后,采用地物特征匹配和对高程剖面进行刚体变换两种方式将生成的DTM与LOLA数据进行比较,前者得到的地形差异的均方根误差不超过10 m,后者经过近20 m的平移后与LOLA数据基本吻合,很好地体现出二者数据的一致性。
中国学者对于Chang’E-1和Chang’E-2影像几何处理和制图方法已展开诸多研究,王任享(2008)在理论上探讨了在切面坐标系和摄影测量坐标系内采用长航线自由网EFP(等效框幅相片)光束法平差对Chang’E-1三线阵CCD影像进行处理的方法,王建荣等人(2008)对Chang’E-1影像EFP光束法空中三角测量方法进行仿真实验,对全航线含6条基线共采集约10万个月面点高程生成DEM,与“真实”DEM相比中误差为40 m。王涛等人(2010)将Chang’E-1影像等效成小的面阵,采用独立模型法对一小段轨道进行区域网平差,平差后物方坐标X和Y方向中误差为几十米,但Z方向中误差仍有一百多米。Peng等人(2010)建立了Chang’E-1影像的推扫式严格成像几何模型,基于共线方程的原理,通过建立内定向和外定向模型,使用最小二乘法空间前方交会得到物方3维点坐标。Di等人(2010)在Chang’E-1影像严格模型的基础上通过迭代最邻近点方法实现了Chang’E-1影像与LAM数据的配准,进而通过结合影像姿态角常差改正和LAM轨道交叉点平差实现二者更高精度的配准,配准后影像与LAM数据的高程差值平均值在物方从200 m降低至3.21 m,LAM数据点投影到像方同名点的不一致降低到0.1像素(Di等,2012)。Wu等人(2011)以推扫式成像模型为基础,使用ULCN 2005上选取的6个月面控制点求出近似外方位元素,通过曲面拟合进行高差约束,实现了Chang’E-1单轨CCD影像与LAM数据的联合光束法平差,平差后像方误差由18个像素降低到1个像素左右。刘一良和刘斌等利用有理函数模型,对Chang’E-1影像的适用性及区域网平差方法进行了研究(Liu等,2014;刘一良,2014)。刘一良(2014)以Chang’E-1和Chang’E-2为主要研究对象,系统研究了行星轨道器影像高精度制图方法。Di等人(2014)提出了一种基于严格几何模型的Chang’E-2自检校光束法平差方法,相邻轨平差后影像间的不一致从20个像素减小到子像素。Wu等人(2014)以LOLA数据作为控制基准,推估出Chang’E-2影像的外方位元素,并利用多轨影像进行联合平差处理,将影像间的不一致降低到子像素。
(4) 激光高度计数据交叉点平差。月球轨道器激光测高运行过程中,会在不同时间点经过行星表面的同一位置,这个位置称为轨道交叉点(crossover)。由于轨道误差以及测量过程的误差,两次不同时间点不同轨道上对同一地点产生的高度测量值出现差值,这个差值称为交叉点不符值(crossover difference)。利用交叉点不符值对测高观测值进行平差是削弱径向轨道误差的基本方法,传统上称之为交叉点平差。月球LRO任务获取LOLA数据也进行了交叉点分析处理,使80%的跨轨误差和90%的沿轨误差均控制在10 m以内,95%的径向误差控制在1 m以内(Mazarico等,2010;Zuber等,2010;Smith等,2011)。日本SELENE任务中,激光测高数据LALT的交叉点被用来对卫星轨道解算进行约束(Goossens等,2011)。胡文敏等系统分析了Chang’E-1激光高度计数据轨道交叉点高程差值的时空分布特性,提出了一种局部平坦地形约束的全球交叉点平差方法,有效地减小了交叉点高程不符值(Hu等,2011,2013;胡文敏等,2013)。
3.2 月球全球制图产品
(1) 轨道器影像全球制图产品。亚利桑那州立大学(ASU)负责LRO相机的团队与德国宇航中心(DLR)合作,基于LRO宽角相机69000个立体像对用数字摄影测量技术制作了100 m分辨率的月球全球地形模型GLD100(Global Lunar DTM 100 m topographic model),由于极区阴影的影响,GLD100覆盖南北纬79°,占月表总面积98.2%,其估计高程精度为10—20 m(http://wms.lroc.asu.edu/troc/view_rdr/WAC_GLD100;NASA,2011a;Scholten等,2012)。该团队还利用2009年11月至2011年2月间获取的15 000幅宽角相机影像制作了分辨率为100 m的全球影像拼图(LROC WA Global Mosaic 100 m),其中非极区部分利用GLD 100做了投影校正,极区部分利用LOLA DEM模型进行投影校正(http://wms.lroc.asu.edu/lroc/view_rdr/WAC_GLOBAL;NASA,2011b)。
日本SELENE任务利用其搭载的地形测绘相机(TC)在100 km轨道高对全月进行分辨率为10 m的高分辨率立体成像。Haruyama等人(2012)通过对多轨道影像间的偏移进行改正,将TC相机影像的相对误差由100 m降低到10 m左右,TC相机影像生成的分辨率为1024像素/度,全月球DTM和正射影像已经发布(Haruyama等,2012)。
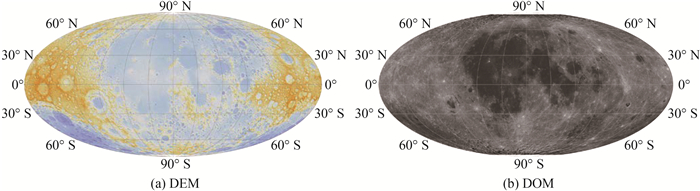
中国Chang’E-1轨道器CCD立体相机实现了月球表面影像的100%覆盖,2008年11月12日公开发布了主要利用下视影像拼接而成的“中国首次月球探测工程全月球影像图”(分辨率为120 m/像素),在图像几何定位中引入了7 km分辨率的DEM数据用于地形校正,图像数据的轨间相对定位精度在2个像元(240 m),全月影像图的平面定位精度约为100—1500 km,略好于ULCN2005联合控制网和克莱门汀基础地图(2.0版)(Li等,2010a;欧阳自远,2010;欧阳自远等,2010)。Chang’E-2轨道器CCD立体相机获取了覆盖全球的7 m分辨率的立体影像,如图 1为利用Chang’E-2 7 m分辨率立体影像生成的DEM和DOM (Li等,2015)。

(2) 轨道器激光高度计数据全球制图产品。日本SELENE搭载的激光高度计在为期一年的运行中获取了约1100万个月面测高点,Araki等人(2009)利用这些测高点制作了分辨率优于0.5°的全月地形图,根据此数据得到月球表面最大高差为19.81 km。
中国的Chang’E-1绕月探测卫星搭载的激光高度计获取了1397轨测高数据,共约912万个月面测高点(Li等,2010b)。平劲松等对Chang’E-1两个月正飞阶段的激光观测数据进行了处理,获取了Chang’E-1月球全球地形模型CLTM-s01(平劲松等,2008),Li等人(2010b)制作了空间分辨率3 km的全月DEM模型,平面定位精度为445 m,高程精度为60同,根据此数据得到月球表面最大高差为19.807 km。胡文敏等对Chang’E-1激光高度计获取的912万个测高点数据中的141000个交叉点平差后生成了全月球DEM(Hu等,2011;胡文敏等,2013)。
NASA戈达德太空飞行中心GSFC (Goddard Space Flight Center)及相关团队用LOLA获取的海量激光测高点陆续制作了不同分辨率月球全球DEM,例如利用2009年7月至2013年7月间获取的65亿多个激光点制作了256像素/度(赤道上约120 m/像素)的全球高程模型,据估计平面精度为20 m,高程精度为1 m(Smith等,2010,2011),激光高度计数据经过了轨道交叉点平差处理并用于LRO轨道精化(Mazarico等,2012)。目前用LOLA数据制作的最高分辨率的月球全球DEM是1024像素/度(赤道上30 m/像素)。
3.3 月球局部高分辨率制图产品
(1) 轨道器影像制作的局部高分辨率正射影像图和DEM。目前利用轨道器影像制作的月球局部高分辨率正射影像与DEM中,精度及分辨率最高的为LRO窄角(NAC)立体影像生产的DOM与DEM。LRO NAC数据的处理主要由6个团队完成(Tran等,2010),分别是ASU,DLR和柏林工业大学(DLR/TUB),NASA艾姆斯研究中心(Ames),亚利桑那大学(UA),俄亥俄州立大学(OSU)以及美国地质调查局(USGS)。处理DOM在部分地区分辨率在0.5 m以上,DEM分辨率在1.5 m以上。
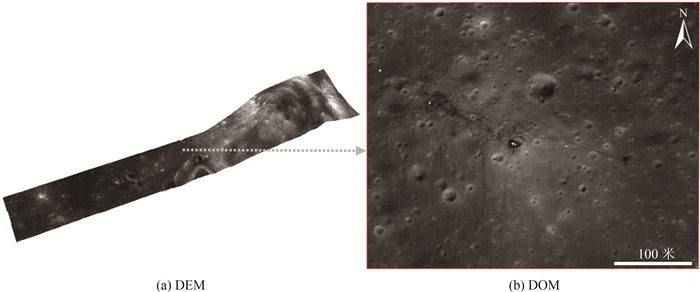
目前利用LRO NAC影像生产的局部地区包括Apollo各着陆区、月球车着陆区、Chang’E-3号着陆区的DOM、DEM均可在http://wms.lroc.asu.edu/lroc下载,如图 2为LRO NAC影像生成的Apollo15号着陆区3维影像图(红色框区域为着陆点),DEM和DOM的原始分辨率分别为2.0 m和0.5 m,在DOM中,着陆舱和载人月球车行驶痕迹清晰可见。Chang’E-2在Chang’E-3的预选着陆区(雨海虹湾区)获取了分辨率优于1.5 m的高分辨率图像,中国科学院国家天文台团队利用1.5 m立体影像制作了Chang’E-3着陆区DEM和DOM用于支持Chang’E-3着陆后的科学规划。
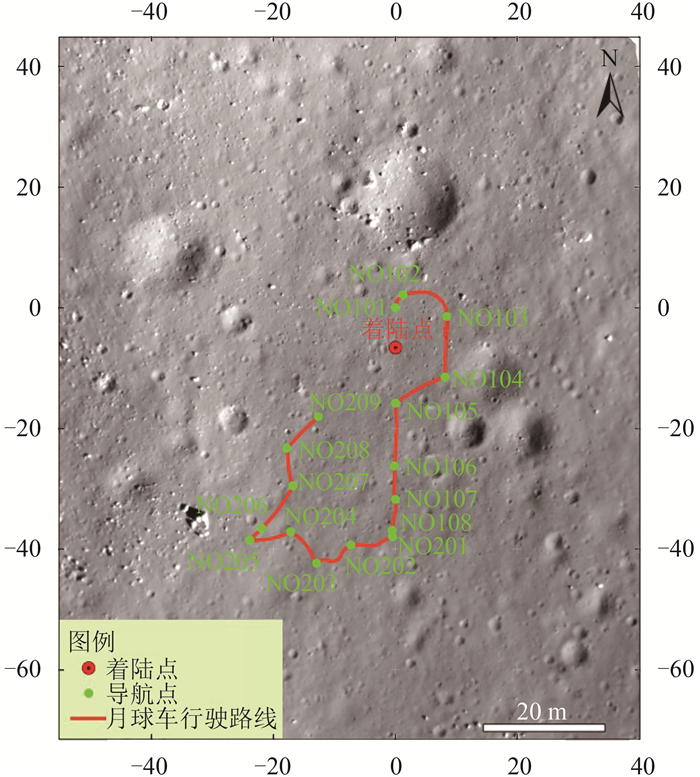
(2) 着陆器降落相机和巡视器相机制作的着陆区DOM和DEM。利用月球着陆器和巡视器获得的影像对着陆区进行高分辨率制图,可以获取着陆探测区域精细的形貌信息。在Chang’E-3任务中,利用着陆器降落相机序列影像生成了着陆区高精度3维制图产品,分辨率高达0.05 m,为玉兔号月球车导航定位提供了比Chang’E-2 DOM更精细的底图(刘召芹等,2014;刘斌等,2014);在每一个停泊点,利用月球车导航相机获取的影像自动生成了DEM、DOM (环形影像为月球车位于着陆器顶部时导航相机影像生成的DOM)、坡度图等地形制图产品,用于支持月球车行驶路径规划(图 3,图 4)(刘召芹等,2014;彭嫚等,2014)。

4 月球遥感制图技术发展展望
(1) 多探测任务月球数据集成建立新一代月球控制网。在月球科学研究和月球探测任务中,月球全球控制网是一项重要的空间数据基础设施,是月球测绘制图和月球探测数据科学应用的空间基准和控制框架。如第3节所述,目前国际上通用的月球全球控制网ULCN 2005基于20世纪90年代及之前获取的探测数据建立,水平精度为100 m至几千米,垂直精度约100 m,总体精度较低。21世纪的月球探测任务中,轨道器影像分辨率、定轨定姿精度、激光测高精度和密度都有显著提高,这些探测任务各自的制图产品之间的不一致以及与ULCN 2005控制网的差异广泛存在。因此ULCN 2005已不能很好地满足21世纪多个探测任务数据处理中作为控制基准的需求,为了消除和减小不同探测任务数据空间位置的不一致,更好地综合利用各国探测任务获取的最新的月球探测数据进行月球科学研究,迫切需要基于多探测任务遥感数据构建新一代月球全球控制网。建立这样一个月球全球控制网,需要解决一系列关键技术问题,也需要国际相关机构与团队的合作。
(2) 多探测任务月球数据集成精细制图。几十年来,多探测任务获取的影像及激光测高数据对对月球表面进行了多次不同分辨率的覆盖,正在执行中的探测任务还在源源不断地获取月表高分辨率数据,例如在阿波罗11号着陆区,仅LRO窄角相机已重复获取32幅影像。如何集成多探测任务月球影像数据进行精细制图,提高制图产品定位精度和分辨率,是重要的研究课题。通过多基线摄影测量和超分辨率重建技术,有望制作出超分辨率DOM和DEM。这将十分有利于精细的月球科学研究,如石块识别和统计分析,月壤厚度计算等。
(3) 海量月球探测数据的自动处理。随着月球探测任务的累积、遥感传感器分辨率的不断提高,国际国内已积累了海量的月球遥感数据并且数据量持续增长,已经远远超出了人工处理的能力。例如,从米级和亚米级分辨率的月球遥感影像可以分辨出巨量的、以往中低分辨率影像上无法分辨的形貌特征,然而,大比例尺地貌图制图、地质填图等工作还远没有充分展开和完成,大量的数据获取后存档而无法及时处理分析。目前,尽管有一些月球表面特征自动提取的研究,绝大多数目标识别和分析的工作是基于人工解译完成的。因此,海量月球探测数据的自动处理是月球科学研究急需的支撑技术,包括自动的几何、辐射、光谱处理、目标识别、全球形貌测图、地质填图等,除了月球测绘遥感、月球地质、月球地貌等相关专业技术的发展外,地质云计算、深度学习等技术将在海量月球探测数据的自动处理方面大有用武之地。
(4) 月球制图标准、数据共享与国际合作。除了制图技术本身的发展外,为了更好地综合利用各国的探测数据进行遥感制图和月球科学研究,十分有必要建立和完善国际月球制图标准,包括坐标系、控制网、制图系列比例尺的确定、地图投影、地物的分类与表达、数据格式与编码等。同时,在遵循共有标准的前提下,原始探测数据和所生成制图产品的及时共享,是各国共同促进月球科学研究和推动技术进步的应有选择。所有这些标准和共享的实现,有赖于有效的国际合作,需要相关业务主管部分、国际组织和科学工作者的共同努力。
参考文献(References)
-
Araki H, Tazawa S, Noda H, Ishihara Y, Goossens S, Sasaki S, Kawano N, Kamiya I, Otake H, Oberst J, Shum C.2009.Lunar global shape and polar topography derived from Kaguya-LALT laser altimetry. Science, 323 (5916): 897–900. DOI: 10.1126/science.1164146.
-
Archinal B A, A’hearn M F, Bowell E, Conrad A, Consolmagno G J, Courtin R, Fukushima T, Hestroffer D, Hilton J L, Krasinsky G A, Neumann G, Oberst J, Seidelmann P K, Stooke P, Tholen D J, Thomas P C, Williams I P.2011.Report of the IAU working group on cartographic coordinates and rotational elements: 2009. Celestial Mechanics and Dynamical Astronomy, 109 (2): 101–135. DOI: 10.1007/s10569-010-9320-4.
-
Bowker D E and Hughes J K.1971.Lunar Orbiter Photographic Atlas of the Moon (NASA SP-206).[s.l.]:NASA
-
Chin G, Brylow S, Foote M, Garvin J, Kasper J, Keller J, Litvak M, Mitrofanov I, Paige D, Raney K, Robinson M, Sanin K, Smith D, Spence H, Spudis P, Stern S A, Zuber M.2007.Lunar reconnaissance orbiter overview:the instrument suite and mission. Space Science Reviews, 129 (4): 391–419. DOI: 10.1007/s11214-007-9153-y.
-
Devenecia K, Walker S, Zhang B C. New Approaches to Generating and Processing High Resolution Elevation Data with Imagery//Fritch D, ed.Photogrammetric Week'07. Heidelberg, Germany: Wichmann Verlag 2007 : 297 -308.
-
Di K, Yue Z, Peng M and Liu Z.2010.Co-registration of Chang'E-1 stereo images and laser altimeter data for 3D mapping of lunar surface//ASPRS/CaGIS 2010 Specialty Conference.Orlando, Florida, USA:[s.n.]
-
Di K C, Ma R J, Li R. Deriving 3-D shorelines from high resolution IKONOS satellite images with rational functions//Proceedings of ASPRS Annual Conference. Deriving 3-D shorelines from high resolution IKONOS satellite images with rational functions//Proceedings of ASPRS Annual Conference. St.Louis, Missouri: American Society for Photogrammetry and Remote Sensing 2001 .
-
Di K C, Ma R J, Li R X.2003.Rational functions and potential for rigorous sensor model recovery. Photogrammetric Engineering and Remote Sensing, 69 (1): 33–41. DOI: 10.14358/PERS.69.1.33.
-
Di K C, Hu W M, Liu Y L, Peng M.2012.Co-registration of Chang'E-1 stereo images and laser altimeter data with crossover adjustment and image sensor model refinement. Advances in Space Research, 50 (12): 1615–1628. DOI: 10.1016/j.asr.2012.06.037.
-
Di K C, Liu Y L, Liu B, Peng M, Hu W M.2014.A self-calibration bundle adjustment method for photogrammetric processing of Chang'E-2 stereo lunar imagery. IEEE Transactions on Geoscience and Remote Sensing, 52 (9): 5432–5442. DOI: 10.1109/TGRS.2013.2288932.
-
Di K C, Liu Z Q, Wan W H, Peng M. Lunar and Mars Remote Sensing Mapping and Rover Localization. Beijing: Science Press 2015 . ( 邸凯昌, 刘召芹, 万文辉, 彭嫚. 2015. 月球和火星遥感制图与探测车导航定位. 北京: 科学出版社 . )
-
Folkner W M, Williams J G and Boggs D H.2009.The Planetary and Lunar Ephemeris DE 421[R/OL].IPN Progress Report 42-178.http://ipnpr.jpl.nasa.gov/progress_report/42-178/178C.pdf
-
Goossens S, Matsumoto K, Rowlands D D, Lemoine F G, Noda H, Araki H.2011.Orbit determination of the SELENE satellites using multi-satellite data types and evaluation of SELENE gravity field models. Journal of Geodesy, 85 (8): 487–504. DOI: 10.1007/s00190-011-0446-2.
-
Goswami J N, Annadurai M.2009.Chandrayaan-1:india's first planetary science mission to the moon. Current Science, 96 (4): 486–491.
-
Grabois M R.2011.Apollo:learning from the past, for the future. Acta Astronautica, 68 (7/8): 1353–1360. DOI: 10.1016/j.actaastro.2010.08.010.
-
Greeley R, Batson R M. Planetary Mapping. New York: Cambridge University Press 1990 .
-
Grodecki J, Dial G.2003.Block adjustment of high-resolution satellite images described by rational polynomials. Photogrammetric Engineering and Remote Sensing, 69 (1): 59–68. DOI: 10.14358/PERS.69.1.59.
-
GSFC (Goddard Space Flight Center).2008.A Standardized Lunar Coordinate System for the Lunar Reconnaissance Orbiter[EB/OL].LRO Project White Paper Version 4.Greenbelt, Maryland:National Aeronautics and Space Administration.http://lunar.gsfc.nasa.gov/library/451-SCI-000958.pdf
-
Haruyama J, Ohtake M, Matunaga T, Morota T, Honda C, Yokota Y, Ogawa Y, Group L W. Selene (Kaguya) terrain camera observation results of nominal mission period//Proceedings of the 40th Lunar and Planetary Science Conference. Texas: LPI 2009 : 1553 .
-
Haruyama J, Hara S, Hioki K, Iwasaki A, Morota T, Ohtake M, Matsunaga T, Araki H, Matsumoto K, Ishihara Y, Noda H, Sasaki S, Goossens S, Iwata T. Lunar global digital terrain model dataset produced from SELENE (Kaguya) terrain camera stereo observations//Proceedings of the 43rd Lunar and Planetary Science Conference. Houston: Lunar and Planetary Institute 2012 : 1200 .
-
Hu W, Yue Z, Di K.2011.Crossover analysis of Chang'E-1 laser altimeter data. International Achieves of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 38 : 126–130. DOI: 10.5194/isprsarchives-XXXVⅢ-4-W25-126-2011.
-
Hu W M, Di K C, Liu Z Q, Ping J S.2013.A new lunar global DEM derived from Chang'E-1 Laser altimeter data based on crossover adjustment with local topographic constraint. Planetary and Space Science, 87 : 173–182. DOI: 10.1016/j.pss.2013.08.004.
-
Hu W M, Di K C, Yue Z Y, Liu Z Q.2013.Crossover analysis and adjustment for Chang'E-1 laser altimeter data. Acta Geodaetica et Cartographica Sinica, 42 (2): 218–224. ( 胡文敏, 邸凯昌, 岳宗玉, 刘召芹. 2013. 嫦娥一号激光高度计数据交叉点分析与平差处理. 测绘学报, 42 (2): 218–224. )
-
Kato M, Sasaki S, Tanaka K, Iijima Y, Takizawa Y.2008.The Japanese lunar mission SELENE:science goals and present status. Advances in Space Research, 42 (2): 294–300. DOI: 10.1016/j.asr.2007.03.049.
-
Kirk R L, Archinal B A, Gaddis L R, Rosiek M R.2008.Cartography for lunar exploration:2008 status and mission plans. International Society for Photogrammetry and Remote Sensing, 37 (B4): 1473–1480. DOI: 10.1038/289231a0.
-
Kirk R L, Archinal B A, Gaddis L R, Rosiek M R.2012.Lunar cartography:progress in the 2000s and prospects for the 2010s. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX (B4): 489–494. DOI: 10.5194/isprsarchives-XXXIX-B4-489-2012.
-
Li C, Ren X, Liu J, Wang F, Wang W, Yan W, Zhang G. A New global and high resolution topographic map product of the moon from chang'e-2 image data//Proceedings of the 46th Lunar Planetary Science Conference. Texas: LPI 2015 : 1638 .
-
Li C L, Liu J J, Ren X, Mou L L, Zou Y L, Zhang H B, Lü C, Liu J Z, Zuo W, Su Y, Wen W B, Bian W, Zhao B C, Yang J F, Zou X D, Wang M, Xu C, Kong D Q, Wang X Q, Wang F, Geng L, Zhang Z B, Zheng L, Zhu X Y, Li J D, Ouyang Z Y.2010a.The global image of the Moon obtained by the Chang'E-1:data processing and lunar cartography. Science China Earth Sciences, 53 (8): 1091–1102. DOI: 10.1007/s11430-010-4016-x.
-
Li C L, Ren X, Liu J J, Zou X D, Mu L L, Wang J Y, Shu R, Zou Y L, Zhang H B, Lü C, Liu J Z, Zuo W, Su Y, Wen W B, Bian W, Wang M, Xu C, Kong D Q, Wang X Q, Wang F, Geng L, Zhang Z B, Zheng L, Zhu X Y, Li J D, Ouyang Z Y.2010b.Laser altimetry data of Chang'E-1 and the global lunar DEM model. Science China Earth Sciences, 53 (11): 1582–1593. DOI: 10.1007/s11430-010-4020-1.
-
Li R, Wang W, He S, Hwangbo J, Chen Y, Tang P, Meng X, Choung Y, Lawver J, Thomas P, Robinson M, Rosiek M, the LROC Team. Precision photogrammetric modeling of LROC NAC cameras and topographic products//Annual LEAG Meeting 2010. Columbia: LPI .
-
Li Y.2009.Lunar Reconnaissance Orbiter TOPOGRAPHIC MAPPING USING LEIca Photogrammetry Suite[R].Ohio State University
-
Liu B, Liu Y L, Di K C, Sun X L. Block adjustment of Chang'E-1 images based on rational function model//Remote Sensing of the Environment:18th National Symposium on Remote Sensing of China. Wuhan: SPIE 2014 : 91580G -91580G.
-
Liu Y, Di K.2011.Evaluation of rational function model for geometric modeling of chang' E-1 CCD images. International Achieves of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 38 : 121–125. DOI: 10.5194/isprsarchives-XXXVⅢ-4-W25-121-2011.
-
Liu Y L. Research on high precision topographic mapping from Planetary Orbiter Images. Beijing: University of Chinese Academy of Sciences 2014 . ( 刘一良. 2014. 行星轨道器影像高精度制图方法研究. 北京: 中国科学院大学 . )
-
Liu Z Q, Wan W H, Peng M, Zhao Q, Xu B, Liu B, Liu Y L, Di K C, Li L C, Yu T Y, Wang B F, Zhou J L, Chen H M.2014.Remote sensing mapping and localization techniques for teleoperation of chang'e-3 rover. Journal of Remote Sensing, 18 (5): 971–980. DOI: 10.11834/jrs.20144072. ( 刘召芹, 万文辉, 彭嫚, 赵强, 徐斌, 刘斌, 刘一良, 邸凯昌, 李立春, 于天一, 王保丰, 周建亮, 陈宏敏. 2014. 遥感制图与导航定位技术在嫦娥三号遥操作中的应用. 遥感学报, 18 (5): 971–980. DOI: 10.11834/jrs.20144072. )
-
Liu Z Q, Di K C, Peng M, Wan W H, Liu B, Li L C, Yu T Y, Wang B F, Zhou J L, Chen H M.2015.High precision landing site mapping and rover localization for Chang'3 mission. Science China Physics, Mechanics and Astronomy, 58 (1): 1–11. DOI: 10.1007/s11433-014-5612-0.
-
Mazarico E, Neumann G A, Rowlands D D, Smith D E.2010.Geodetic constraints from multi-beam laser altimeter crossovers. Journal of Geodesy, 84 (6): 343–354. DOI: 10.1007/s00190-010-0379-1.
-
Mazarico E, Rowlands D D, Neumann G A, Smith D E, Torrence M H, Lemoine F G, Zuber M T.2012.Orbit determination of the lunar reconnaissance orbiter. Journal of Geodesy, 86 (3): 193–207. DOI: 10.1007/s00190-011-0509-4.
-
NASA (National Aeronautics and Space Administration).2011a.LRO Camera Team Releases High Resolution Global Topographic Map of Moon[EB/OL].[2013-05-10].http://www.nasa.gov/mission_pages/LRO/news/lro-topo.html
-
NASA.2011b.The Far Side of the Moon——and All the Way Around[EB/OL].[2013-05-10].http://www.nasa.gov/mission_pages/LRO/news/lro-farside.html
-
Nozette S, Rustan P, Pleasance L P, Kordas J F, Lewis I T, Park H S, Priest R E, Horan D M, Regeon P, Lichtenberg C L, Shoemaker E M, Eliason E M, McEwen A S, Robinson M S, Spudis P D, Acton C H, Buratti B J, Duxbury T C, Baker D N, Jakosky B M, Blamont J E, Corson M P, Resnick J H, Rollins C J, Davies M E, Lucey P G, Malaret E, Massie M A, Pieters C M, Reisse R A, Simpson R A, Smith D E, Sorenson T C, Vorder Breugge R W, Zuber M T.1994.The clementine mission to the Moon:Scientific overview. Science, 266 (5192): 1835–1839. DOI: 10.1126/science.266.5192.1835.
-
Ouyang Z, Li C L, Zou Y L, Zhang H B, Lv C, Liu J Z, Liu J J, Zuo W, Su Y, Wen W B, Bian W, Zhao B C, Wang J Y, Yang J F, Chang J, Wang H Y, Zhang X H, Wang S J, Wang M, Ren X, Mou L L, Kong D Q, Wang X Q, Wang F, Geng L, Zhang Z B, Zheng L, Zhu X Y, Zheng Y C, Li J Z, Zou X D, Xu C, Shi S B, Gao Y F, Gao G N.2010.Primary scientific results of Chang'E-1 lunar mission. Science China Earth Sciences, 40 (3): 261–280. DOI: 10.1007/s11430-010-0058-3. ( 欧阳自远, 李春来, 邹永廖, 张洪波, 吕昌, 刘建忠, 刘建军, 左维, 苏彦, 温卫斌, 边伟, 赵葆常, 王建宇, 杨建峰, 常进, 王焕玉, 张晓辉, 王世金, 汪敏, 任鑫, 牟伶俐, 孔德庆, 王晓倩, 王芳, 耿良, 张舟斌, 郑磊, 朱新颖, 郑永春, 李俊铎, 邹小端, 许春, 施硕彪, 高亦菲, 高冠男. 2010. 绕月探测工程的初步科学成果. 中国科学:地球科学, 40 (3): 261–280. DOI: 10.1007/s11430-010-0058-3. )
-
Ouyang Z Y. Introduction to Lunar Science. Beijing: China Astronautic Publishing House 2005 . ( 欧阳自远. 2005. 月球科学概论. 北京: 中国宇航出版社 . )
-
Ouyang Z Y, Jiang J S, Li C L, Sun H X, Zou Y L, Liu J Z, Liu J J, Zhao B C, Ren X, Yang J F, Zhang W X, Wang J Y, Mou L L, Chang J, Zhang L Y, Wang H Y, Li Y Q, Zhang X H, Zheng Y C, Wang S J, Bian W.2008.Preliminary scientific results of Chang'E-1 lunar orbiter:based on payloads detection data in the first phase. Chinese Journal of Space Science, 28 (5): 361–369.
-
Ouyang Z Y.2010.Science results of Chang'e-1 lunar orbiter and mission goals of Chang'e-2. Spacecraft Engineering, 19 (5): 1–6. DOI: 10.3969/j.issn.1673-8748.2010.05.001. ( 欧阳自远. 2010. 嫦娥一号卫星的初步科学成果与嫦娥二号卫星的使命. 航天器工程, 19 (5): 1–6. DOI: 10.3969/j.issn.1673-8748.2010.05.001. )
-
Peng M, Yue Z, Liu Y, Di K. Lunar and Mars orbital stereo image mapping//Proceedings of SPIE 8203, Remote Sensing of Environment:The 17th Remote Sensing Conference of China. Hangzhou: SPIE 2010 .
-
Peng M, Wan W H, Wu K, Liu Z Q, Li L, Di K C, Li L C, Miao Y, Zhan L.2014.Topographic mapping capbility analysis of Chang'e-3 Navcam stereo images and three-dimensional terrain reconstruction for mission operations. Journal of Remote Sensing, 18 (5): 995–1002. DOI: 10.11834/jrs.20144073. ( 彭嫚, 万文辉, 吴凯, 刘召芹, 李力, 邸凯昌, 李立春, 苗毅, 詹磊. 2014. 嫦娥三号导航相机测图能力分析及地形重建. 遥感学报, 18 (5): 995–1002. DOI: 10.11834/jrs.20144073. )
-
Ping J S, Huang Q, Yan J G, Cao J F, Tang G S, Shu R.2008.Lunar topographic model CLTM-s01 from Chang'E-1 laser altimeter. Science in China Series G:Physics, Mechanics and Astronomy, 38 (11): 1601–1612. DOI: 10.1360/2008-53-11-1601. ( 平劲松, 黄倩, 鄢建国, 曹建峰, 唐歌实, 舒嵘. 2008. 基于嫦娥一号卫星激光测高观测的月球地形模型CLTM-s01. 中国科学G辑:物理学力学天文学, 38 (11): 1601–1612. DOI: 10.1360/2008-53-11-1601. )
-
Radhadevi P V, Solanki S S, Nagasubramanian V, Reddy D S, Sumanth T K, Saibaba J, Varadan G.2013.An algorithm for geometric correction of full pass TMC imagery of Chandrayaan-1. Planetary and Space Science, 79-80 : 45–51. DOI: 10.1016/j.pss.2013.01.012.
-
Reeves R. The Superpower Space Race:An Explosive Rivalry through the Solar System. New York: Plenum Press 1994 .
-
Robinson M, Brylow S M, Tschimmel M, Humm D, Lawrence S J, Thomas P C, Denevi B W, Bowman-Cisneros E, Zerr J, Ravine M A, Caplinger M A, Ghaemi F T, Schaffner J A, Malin M C, Mahanti P, Bartels A, Anderson J, Tran T N, Eliason E M, McEwen A S, Turtle E, Jolliff B L, Hiesinger H.2010.Lunar reconnaissance orbiter camera (LROC) instrument overview. Space Science Reviews, 150 (1-4): 81–124. DOI: 10.1007/s11214-010-9634-2.
-
Scholten F, Oberst J, Matz K D, Roatsch T, Wählisch M, Speyerer E J, Robinson M S.2012.GLD100:the near-global lunar 100 m raster DTM from LROC WAC stereo image data. Journal of Geophysical Research:Planets, 117 (E12): DOI: 10.1029/2011JE003926.
-
Sivakumar V, Kumar B, Srivastava S K, Krishna B G, Srivastava P K, Kumar A S K.2012.DEM generation for lunar surface using chandrayaan-1 TMC triplet data. Journal of the Indian Society of Remote Sensing, 40 (4): 551–564. DOI: 10.1007/s12524-011-0172-5.
-
Smith D E, Zuber M T, Neumann G A, Lemoine F G, Mazarico E, Torrence M H, Mcgarry J F, Rowlands D D, Head J W, Duxbury T H, Thomas H, Aharonson O, Lucey P G, Robinson M S, Barnouin O S, Cavanaugh J F, Sun X L, Liiva P, Mao D D, Smith J C, Bartels A E.2010.Initial observations from the lunar orbiter laser altimeter (LOLA). Geophysical Research Letters, 37 (18): DOI: 10.1029/2010GL043751.
-
Smith D E, Zuber M T, Neumann G A, Mazarico E, Head Ⅲ J, Torrence M H, LOLA Science Team. Results from the lunar orbiter laser altimeter (LOLA):global, high-resolution topographic mapping of the moon//Proceedings of the 42nd Lunar and Planetary Science Conference. Woodlands, Texas: Lunar and Planet, Institute 2011 .
-
Tao C V, Hu Y.2001.A comprehensive study of the rational function model for photogrammetric processing. Photogrammetric Engineering and Remote Sensing, 67 (12): 1347–1357.
-
Tran T, Rosiek M, Beyer R A, Mattson S, Howington-Kraus E, Robinson M, Archinal B A, Edmundson K, Harbour D and Anderson E.2010.Generating digital terrain models using LROC NAC images//Proceedings of Special joint symposium of ISPRS Technical Commission IV and AutoCarto/ASPRS/CaGIS 2010 Fall Specialty Conference
-
Wang J R, Wang X Y, Li J, Zhao F.2008.The application of three-line array CCD photogrammetry theory on the lunar exploration. Science of Surveying and Mapping, 33 (6): 19–20. DOI: 10.3771/j.issn.1009-2307.2008.06.005. ( 王建荣, 王新义, 李晶, 赵斐. 2008. 三线阵CCD摄影测量理论在月球探测中的应用. 测绘科学, 33 (6): 19–20. DOI: 10.3771/j.issn.1009-2307.2008.06.005. )
-
Wang R X.2008.EFP bundle triangulation using lunar imagery obtained from satellite three-line-array camera. Science of Surveying and Mapping, 33 (4): 5–7. DOI: 10.3771/j.issn.1009-2307.2008.04.001. ( 王任享. 2008. 月球卫星三线阵CCD影像EFP光束法空中三角测量. 测绘科学, 33 (4): 5–7. DOI: 10.3771/j.issn.1009-2307.2008.04.001. )
-
Wang T, Xiang L, Cao F.2010.Study on calculating three-line-array imagery obtained from satellite Chang'e-1. Remote Sensing Information, (3):18-20, 25 (3): 18–20, ,25. DOI: 10.3969/j.issn.1000-3177.2010. ( 王涛, 项琳, 曹锋. 2010. 月球卫星Chang'E-1三线阵影像数据的解算试验. 遥感信息, (3):18-20, 25 (3): 18–20, ,25. DOI: 10.3969/j.issn.1000-3177.2010. )
-
Wu B, Guo J, Zhang Y S, King B A, Li Z L, Chen Y Q.2011.Integration of Chang'E-1 imagery and laser altimeter data for precision lunar topographic modeling. IEEE Transactions on Geoscience and Remote Sensing, 49 (12): 4889–4903. DOI: 10.1109/TGRS.2011.2153206.
-
Wu B, Hu H, Guo J.2014.Integration of Chang'E-2 imagery and LRO laser altimeter data with a combined block adjustment for precision lunar topographic modeling. Earth and Planetary Science Letters, 391 : 1–15. DOI: 10.1016/j.epsl.2014.01.023.
-
Ye P J, Huang J C, Zhang T X, Meng L Z.2013.Technology achievements of Chang'e-2 satellite and prospect of China deep space exploration. Science China Technological Sciences, 43 (5): 467–477. DOI: 10.1360/092013-229. ( 叶培建, 黄江川, 张廷新, 孟林智. 2013. 嫦娥二号卫星技术成就与中国深空探测展望. 中国科学:技术科学, 43 (5): 467–477. DOI: 10.1360/092013-229. )
-
Zhao B C, Li C L, Huang J C, Wen D S, Yang J F, Gao W, Ruan P, Xue B, Tang Q.2012.Analysis on In-orbit CCD stereo camera images of Chang'e-2 Lunar satellite. Spacecraft Engineering, 21 (5): 1–7. DOI: 10.3969/j.issn.1673-8748.2012.05.001. ( 赵葆常, 李春来, 黄江川, 汶德胜, 杨建峰, 高伟, 阮萍, 薛彬, 唐茜. 2012. 嫦娥二号月球卫星CCD立体相机在轨图像分析. 航天器工程, 21 (5): 1–7. DOI: 10.3969/j.issn.1673-8748.2012.05.001. )
-
Zuber M T, Smith D E, Zellar R S, Neumann G A, Sun X L, Katz R B, Kleyner I, Matuszeski A, McGarry J F, Ott M N, Ramos-Izquierdo L A, Rowlands R D, Torrence M H, Zagwodzki T W.2010.The lunar reconnaissance orbiter laser ranging investigation. Space Science Reviews, 150 (1/4): 63–80. DOI: 10.1007/s11214-009-9511-z.


