|
|
|
收稿日期: 2015-05-18; 修订日期: 2015-10-08; 优先数字出版日期: 2015-10-15
基金项目: 国家自然科学基金(编号:41471305,41405036,41301653);四川省杰出青年基金培育项目(编号:2015JQ0037);重庆市气象局开放基金(编号:kfjj-201402)
中图分类号: TP722.6
文献标识码: A
文章编号: 1007-4619(2016)01-0094-09
|
摘要
大气水汽对全球以及区域气候变化有重要的影响,精确获取水汽数据是非常重要的研究方向。TRMM(热带降雨观测计划)卫星上搭载的VIRS传感器(可见光/红外扫描仪)在降雨观测中应用广泛,但是目前很少有研究将其用于水汽反演。本文尝试使用VIRS的两个红外分裂窗通道(10.8 μm和12 μm),通过建立改进的方差协方差比值分裂窗方法进行水汽反演。首先对TRMM/VIRS数据和方差协方差比值法进行了介绍,接着针对VIRS数据特点,利用MODTRAN辐射传输模式和探空大气廓线数据模拟回归了大气透过率和水汽的定量关系,最后利用VIRS遥感数据开展了水汽反演试验。由于红外波段分裂窗水汽反演算法只适合于晴空条件下,因此在云雨识别的时候,为了保证时空一致性,采用TRMM提供的基于微波成像仪TMI的云中液态水信息来对晴空与否进行判断。水汽反演结果首先与地基GPS大气水汽观测值进行了比较,均方根误差为5.76 mm;其次和MODIS卫星水汽反演结果进行了面状对比,二者显示出了高度的区域一致性。验证结果表明,TRMM/VIRS的水汽反演结果精度较高,具有进行业务化推广的潜力,丰富了水汽数据的来源,同时也对利用风云系列卫星传感器数据进行热红外通道的水汽反演具有借鉴意义。
关键词
大气水汽; 热红外; 分裂窗; 可见光/红外扫描仪; 热带降雨观测卫星
1 引 言
大气水汽是地学研究中的一项重要参量。它能增强大气对能量的吸收和辐射强度,是重要的温室气体(Intergovernmental Panel on Climate Change,2007;高凤玲等,2013)。而且,作为大气环流的主要驱动因子之一,水汽一直都是数值预报模式和水文过程研究中不可或缺的变量(Nakamura等,2004;Smith等,2000)。准确的水汽数据在利用遥感数据进行地表参数反演时具有重要的作用(Vermote等,2002;李小凡等,2009)。研究表明,水汽误差降低10 mm,地表反照率的精度可以提升0.01(Schroedter-Homscheidt等,2008)。因此,获取高时空分辨率的水汽数据一直都是相关研究领域的热点。
大气水汽的探测方法从技术手段上可以分为探空气球、地基遥感和卫星遥感等。本文主要讨论利用热红外通道卫星观测数据进行水汽反演的方法。晴空条件下,影响热红外波段遥感数据的因素有地表温度、大气平均温度以及大气的吸收等,其中大气吸收主要由水汽引起。利用两个通道采用分裂窗算法进行水汽反演,可以减少反演过程中的变量个数。因此,随着卫星传感器设置的波段数的增加,越来越多的研究人员采用分裂窗技术实现了水汽的反演。表 1给出了设置有热红外分裂窗通道的传感器相关参数设置。
Table 1 Satellite parameters based sensors with thermal infrared split window channels 下载CSV
| 卫星/传感器 | 重复周期/d | 入射角/(°) | 频率/μm | 分辨率/km | 时间跨度 |
| Aqua/Terra,MODIS | 1 | ±55 | 0.4—14.4 | 0.5,1 | 2002— |
| NOAA/AVHRR | 1 | ±55.4 | 0.55—0.68;0.725—1.100;3.55—3.93; 10.5—11.3;11.5—12.5 | 1.1 | 2002— |
| TRMM/VIRS | 1 | 0 | 0.63,1.60,3.75,10.80,12 | 2 | 1998-01— |
| FY-2C,FY-2D,FY-2E | 1 | 0.5—12.5 | 5 | 2004-10— | |
| FY-3 | ±55.4 | 0.43—12.50 | 1.1 | 2008— |
目前,分裂窗水汽反演使用最多的是AVHRR(高级甚高分辨率辐射仪)数据。Dalu(1986)首先针对AVHRR数据提出了大气水汽分裂窗反演算法,建立了水汽和AVHRR分裂窗通道亮温差值的线性关系,线性关系的系数可以通过辐射传输方程模拟来确定(Choudhury和DiGirolamo,1995),也可以通过基于地表实测的水汽观测数据获得(Justice等,1991)。之后,Kleespies和McMillin(1990)又发展了另一种算法。该方法首先选择两个像元,假设这两个像元的大气水汽以及用于分裂窗计算的两个波段的地表发射率相等,而且地表温度没有明显差异。那么,两个波段大气透过率的比值可以表示为两个分裂窗通道在这两个像元内亮温差值的比值。Schroedter等人(2008)以MSG-SEVIRI(欧洲静止气象卫星-旋转增强可见光红外成像仪)的10.8 μm和12 μm通道作为分裂窗通道,运用该方法实现了水汽的反演。但是,此方法要求相邻两个像元地表温度必须有明显的变化,这限制了该方法的应用范围。Jedlovec(1990)发展了方差比值法对这种方法进行了改进,即通过亮温空间方差的比值求取分裂窗两个波段的大气透过率比值,从而扩展了算法的适用性。
考虑到方差比值法并不能很好处理像元间地表发射率的变化(Kleespies和McMillin,1990;Jedlovec,1990),在方差比算法的基础上,方差协方差比值法又被提出来。该方法在推导两个波段大气透过率比值时,采用了两个波段所在若干像元的方差和协方差比值,此时两个波段的地表发射率的比值也变为了若干像元的均值,因而波动会更小,消去的时候引起的误差也会减小,所以该方法对地表发射率不敏感(Harris和Mason,1992;Sobrino等,1994)。Ottle等人(1997)利用方差协方差比值法在海洋和陆地上空,分别利用ATSR-IR和AVHRR对水汽进行了反演,精度均为4 mm左右。Sobrino等人(1999)利用AVHRR数据采用方差协方差比值法和线性分裂窗法计算了伊比利亚半岛的大气水汽,计算精度能够达到5 mm。Li等人(2003)利用ATSR2 数据采用方差协方差比值法开发了可以用于业务化的水汽反演算法,利用MODTRAN模拟数据给出了不同入射角下大气透过率比值和大气水汽的回归公式,最后水汽反演的精度可以达到2.2 mm。Zhang等人(2008)还利用了Li等人(2003)的方法基于AATSR反演了黄土高原的大气水汽,结果和MODIS的水汽反演结果在空间分布上具有一致性,显示了算法的可靠性。
虽然采用热红外波段的分裂窗技术进行水汽反演的算法有很多,但是目前还没有针对TRMM卫星上的VIRS数据的水汽反演算法。VIRS设置有10.8 μm和12 μm的红外分裂窗通道,因此,本研究针对VIRS开展水汽反演的研究。
2 数据及处理
本文采用TRMM卫星的VIRS传感器数据。TRMM卫星由美日联合研制,于1997年11月28日成功发射,为近赤道非太阳同步轨道卫星。TRMM卫星35°的轨道倾角远小于其他极轨卫星,这使得TRMM卫星具有较高的时间分辨率(Simpson等,1996)。根据纬度由低至高,TRMM每天可以覆盖全球1—3次。其搭载的传感器包括降雨雷达PR、TMI、VIRS、云和地球辐射能量测量系统CERES和闪电成像感应器KIS。
VIRS是一个五通道成像分光辐射计,350 km轨道宽度和±45°的扫描角度决定了其720 km的扫描宽度和2.11 km的星下点瞬时视场(2001年8月7日后分别约为833 km和2.4 km),45°扫描角度上的瞬时视场增加到3.02 km(Kummerow等,1998)。VIRS有5个波段,包括1个可见光波段(0.6 μm)、1个近红外波段(1.6 μm)、1个中波红外波段(3.8 μm)和2个热红外波段(10.8 μm和12 μm)。VIRS可提供云顶温度、结构作为TRMM上其他传感器进行降水反演的补充,其重要性在于为低观测频率的TRMM卫星微波平台和静止卫星可见光、红外平台之间搭建桥梁(Simpson等,1996)。
本文还应用了NOAA气候数据中心提供的探空气球获取的大气廓线数据,这些数据由分布在全球的超过1500个探空站点获得,参数包括温度、压强和湿度。这些数据用于辐射传输方程的模拟。水汽反演结果的验证数据选择的是北美地区设置的SuomiNet实验数据(Ware等,2000)。SuomiNet由美国国家科学基金会资助,通过相关高校之间的合作建立的实时GPS地基观测网络,用于大气科学研究(Ware等,2000)。其在北美分布有近300个监测点,提供0.5 h时间分辨率的水汽GPS监测结果。每个站点都利用GPS信号进行大气水汽的反演。由于实测大气水汽数据不足,故选择GPS的反演结果对算法进行验证。
3 算法推导
3.1 分裂窗反演算法
算法利用10.8 μm和12 μm两个波段的大气透过率比值进行水汽的反演。具体推导过程如下:在晴空无散射大气的状况下、入射角为θ时,传感器接收到的辐射亮度可以表示为:
$ \begin{array}{*{20}{c}}{{B_i}\left({{T_{bi}}\left(\theta \right)} \right)= {\varepsilon _i}\left(\theta \right){B_i}\left({{T_{\rm{s}}}} \right){t_i}\left(\theta \right)+ }\\{I_i^ \uparrow \left(\theta \right)+ I_i^ \downarrow \left(\theta \right)\left({1 - {\varepsilon _i}\left(\theta \right)} \right){t_i}\left(\theta \right)}\end{array} $ (1)
式中,Tbi为某一通道的辐射亮度温度,Ts为地表温度,Bi为某一通道的普朗克辐射亮度,ti为某一通道下整层大气的透过率,εi为某一通道的地表发射率,Ii↑(θ)为大气自身的上行辐射,Ii↓(θ)为大气的下行辐射。
选取相邻的N个像元,以VIRS的第4、第5分裂窗波段为例,可以写出2N个式(1)。假设N个像元的平均亮温为${\bar T}$b,平均地表温度为${\bar T}$s,则对两个分裂窗波段可以得到:
$ \begin{array}{*{20}{c}}{{B_i}\left({{{\bar T}_{\rm{b}}}} \right)= {{\bar \varepsilon }_i}\left(\theta \right){B_i}\left({{{\bar T}_{\rm{s}}}} \right){{\bar t}_i}\left(\theta \right)+ }\\{\bar I_i^ \uparrow \left(\theta \right)+ \bar I_i^ \downarrow \left(\theta \right)\left({1 - {{\bar \varepsilon }_i}\left(\theta \right)} \right){{\bar t}_i}\left(\theta \right)}\end{array} $ (2)
式中,变量上方的横线符表示N个像元的平均值,i为通道符号。如果假设N个像元的地表发射率相等,且大气状况相似,那么对于某一通道的N个式(1)和对应通道的式(2)相减,VIRS两个分裂窗波段可以分别得到表达式为:
$ \begin{array}{*{20}{c}}{\sum\limits_{j = 1}^N {B_4^j\left({{T_{bj}}} \right)- N \cdot {B_4}\left({{{\bar T}_{\rm{b}}}} \right)} = }\\{{\varepsilon _4}{t_4}\left({\sum\limits_{j = 1}^N {B_4^j\left({{T_{sj}}} \right)- N \cdot {B_4}\left({{{\bar T}_{\rm{s}}}} \right)} } \right)}\end{array} $ (3)
$ \begin{array}{*{20}{c}}{\sum\limits_{j = 1}^N {B_5^j\left({{T_{bj}}} \right)- N \cdot {B_5}\left({{{\bar T}_{\rm{b}}}} \right)} = }\\{{\varepsilon _5}{t_5}\left({\sum\limits_{j = 1}^N {B_5^j\left({{T_{sj}}} \right)- N \cdot {B_5}\left({{{\bar T}_{\rm{s}}}} \right)} } \right)}\end{array} $ (4)
式中,4和5为VIRS的通道标识,j为像元符号。由式(3)(4)可以得到:
$ \frac{{{t_4}}}{{{t_5}}} = \frac{{{\varepsilon _5}\left({\sum\limits_{j = 1}^N {B_4^j\left({{T_{sj}}} \right)- N \cdot {B_4}\left({{{\bar T}_{\rm{s}}}} \right)} } \right)\left({\sum\limits_{j = 1}^N {B_4^j\left({{T_{sj}}} \right)- N \cdot {B_4}\left({{{\bar T}_{\rm{s}}}} \right)} } \right)}}{{{\varepsilon _4}\left({\sum\limits_{j = 1}^N {B_5^j\left({{T_{bj}}} \right)- N \cdot {B_5}\left({{{\bar T}_{\rm{b}}}} \right)} } \right)\left({\sum\limits_{j = 1}^N {B_5^j\left({{T_{sj}}} \right)- N \cdot {B_5}\left({{{\bar T}_{\rm{s}}}} \right)} } \right)}} $ (5)
式中,对普朗克函数进行泰勒级数一阶展开,可以得到如下的近似式:
$ {B_i}\left(T \right)\cong {B_i}\left({{T_{\rm{b}}}} \right)+ \frac{{\partial B}}{{\partial T}}\left({T - {T_{\rm{b}}}} \right) $ (6)
将式(6)代入式(5),且式(5)分子分母的最后一项可以消去,式(5)简化为:
$ \frac{{{t_4}}}{{{t_5}}} = \frac{{{\varepsilon _5}\sum\limits_{j = 1}^N {\left({T_{bj}^4 - \bar T_{bj}^4} \right)\left({T_{bj}^5 - \bar T_{bj}^5} \right)} }}{{{\varepsilon _4}\sum\limits_{j = 1}^N {\left({T_{bj}^5 - \bar T_{bj}^5} \right)\left({T_{bj}^5 - \bar T_{bj}^5} \right)} }} $ (7)
式(7)即为方差协方差比值法进行水汽反演的计算公式(Sobrino等,1994)。目前采用方差协方差法进行水汽反演的研究都假设处于分裂窗波段的地表发射率是相等的,本研究也进行类似的处理。通过式(7)可以发现,该方法在获取分裂窗通道大气透过率比值的时候,不需要借助于任何辅助数据,有效提高了算法的通用性。
在该算法中,N在不同的研究中取值不同。Li等人(2003)采用ATSR2数据,N为100,具体的范围为10×10像元的方形区域,最后水汽反演结果的空间分辨率为10 km;Sobrino等人(1999)采用AVHRR数据,选择的方形区域为21×21像元,N取441;Zhang等人(2008)采用了AATSR数据,选取了5×5像元范围,N取25;Ottle等人(1997)以探空数据观测点为中心,选取了50×50像元范围,N取2500。为了尽量保持原遥感数据的空间分辨率,本研究也采用5×5像元范围,同时采用滑动窗的计算方法使得遥感数据的空间分辨率不发生变化,且保证每个像元都能计算对应的水汽值。
3.2 大气透过率比值和大气水汽的关系
图 1给出了不同大气水汽和水平气象视距下TRMM/VIRS两个红外分裂窗通道的响应情况。从图中可以看出,10.8 μm和12 μm波段对水汽的吸收作用不一样,这也是基于分裂窗方法进行水汽反演的基本前提。其次,尽管水平气象视距对透过率存在一定的影响,但与水汽相比该影响可以忽略。因此,研究中在应用MODTRAN进行大气透过率模拟时将水平气象视距的值设为20 km,这不会对大气水汽的反演结果造成明显影响(何立明等,2003)。如果水汽是大气中对于红外分裂窗两个波段的唯一吸收物质,那么水汽值越接近0,两个波段的大气透过率比值也就越接近1。但是,Kleespies和McMillin(1990)在对AVHRR和VAS分别回归出来的透过率比值和大气水汽线性关系进行求取截距时,AVHRR的截距接近为1,VAS为0.92。这说明对于VAS的分裂窗通道除了受水汽影响以外,还有其他影响因素,这些因素包括二氧化碳和传感器本身的噪声。对于VIRS的两个分裂窗通道,额定噪声等效温差分别为0.04 K和0.05 K(Kummerow等,1998)。与MODIS对应通道的额定噪声等效温差0.05 K相比,VIRS数据质量的精度较高。由于二氧化碳含量相比水汽含量较少,本研究暂不考虑其影响。
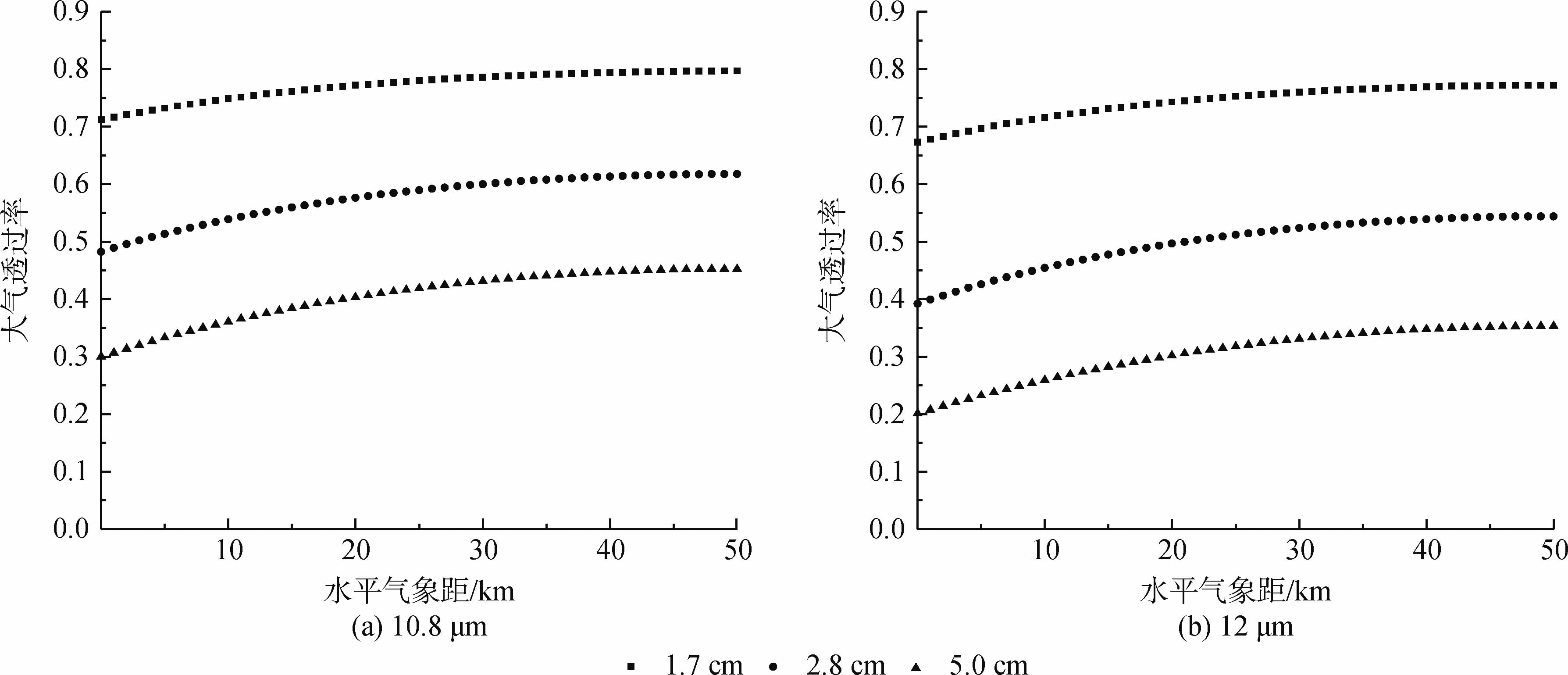
晴空条件下,在红外窗区波段传感器接收的辐射主要受到大气水汽吸收作用的影响。用于分裂窗水汽反演的两个波段对水汽的敏感性不一样。随着水汽量的变化,12 μm波段的透过率降低比10.8 μm波段更剧烈(图 1),这样两个波段的大气透过率的比值和水汽含量存在着函数关系。由于大气透过率和大气光学厚度呈指数递减关系,而光学厚度和大气水汽的关系也比较复杂,因此很难建立大气透过率和大气水汽准确的函数关系式。目前很多研究都是根据模拟数据通过回归分析建立分裂窗通道大气透过率比值和大气水汽之间的函数关系。
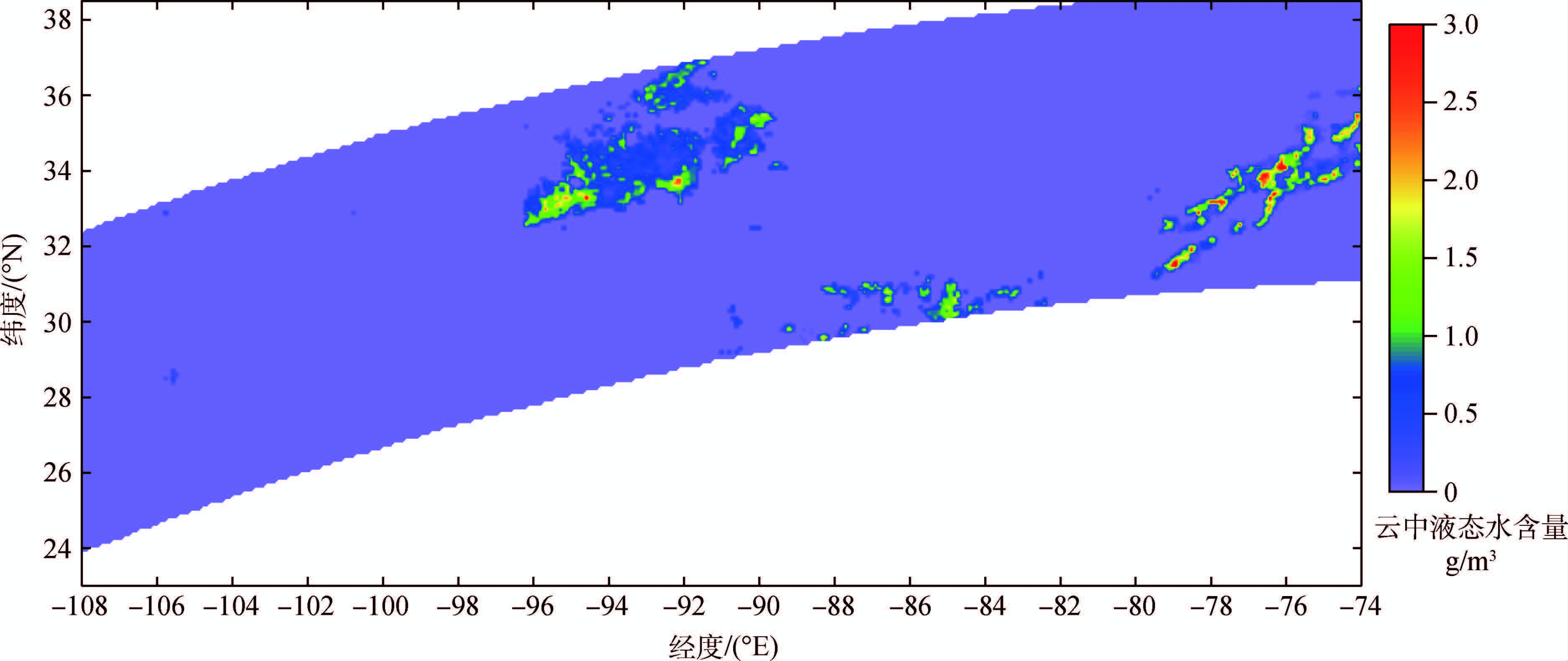
由于红外波段分裂窗水汽反演算法只适合于晴空条件下,因此,在利用方差协方差算法对VIRS进行水汽反演之前,必须先进行云雨识别。考虑到云的动态变化较快,因此最好的办法是借助于VIRS数据本身进行云雨识别,能最大程度保证水汽反演结果的可靠性。刘显通等人(2010)研究了针对VIRS的白天云监测方案。考虑到该方案比较复杂,只针对白天进行云监测,而本文的重点并不是解决VIRS云检测的问题,故本文采用TRMM提供的基于TMI的云中液态水信息来对晴空与否进行判断。TMI和VIRS具有时空一致性,基于TMI的2A12数据包含了云中液态水、冰云粒子等水廓线信息。通过与降雨雷达的比较,TMI/2A12能够提供相对准确的云中液态水产品,可以用于云雨和晴空天气的区分(Gopalan等,2010)。图 2为2009年8月17日TMI云中液态水的数据。可以看出,利用TMI的2A12数据可以有效的进行云区识别。
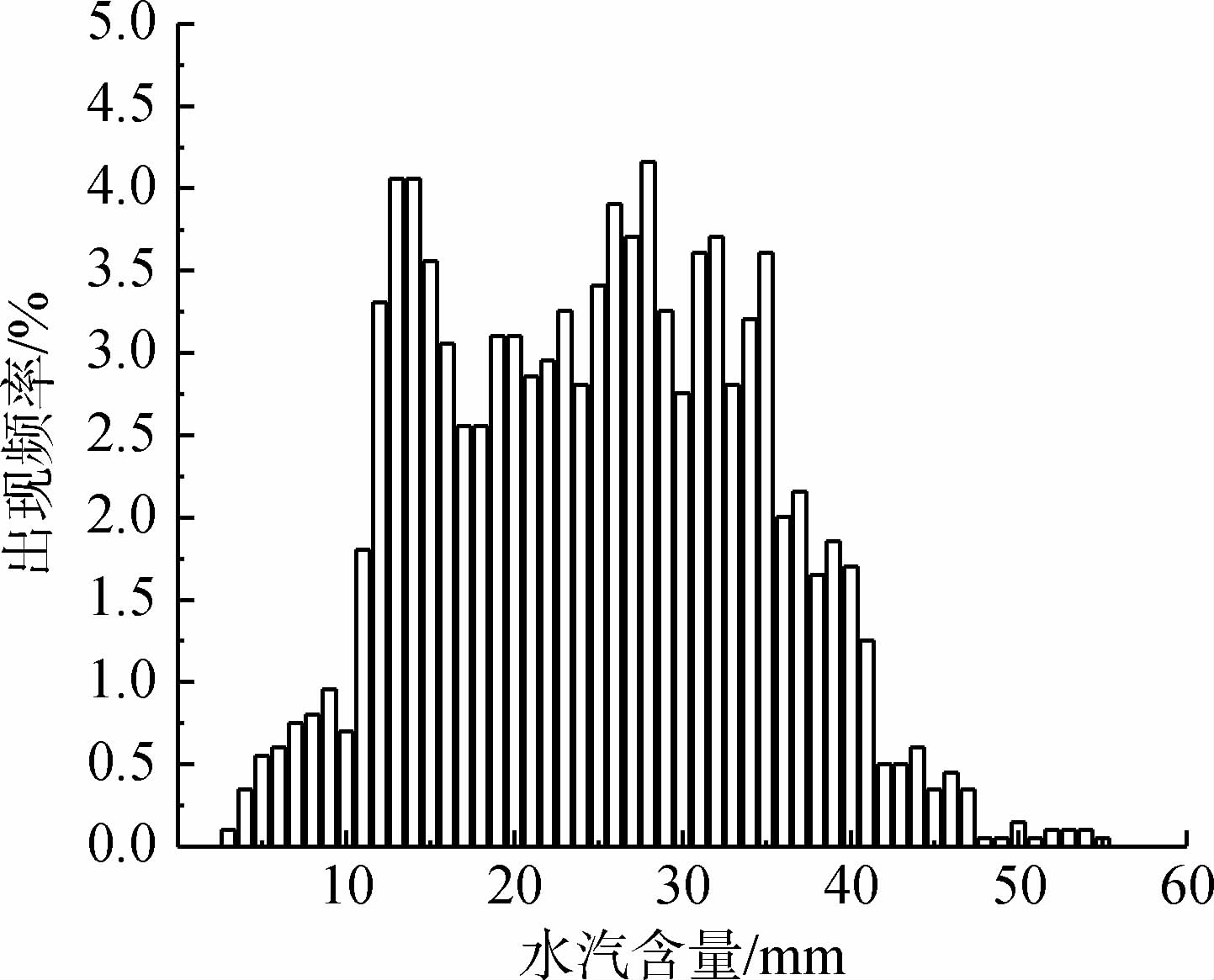
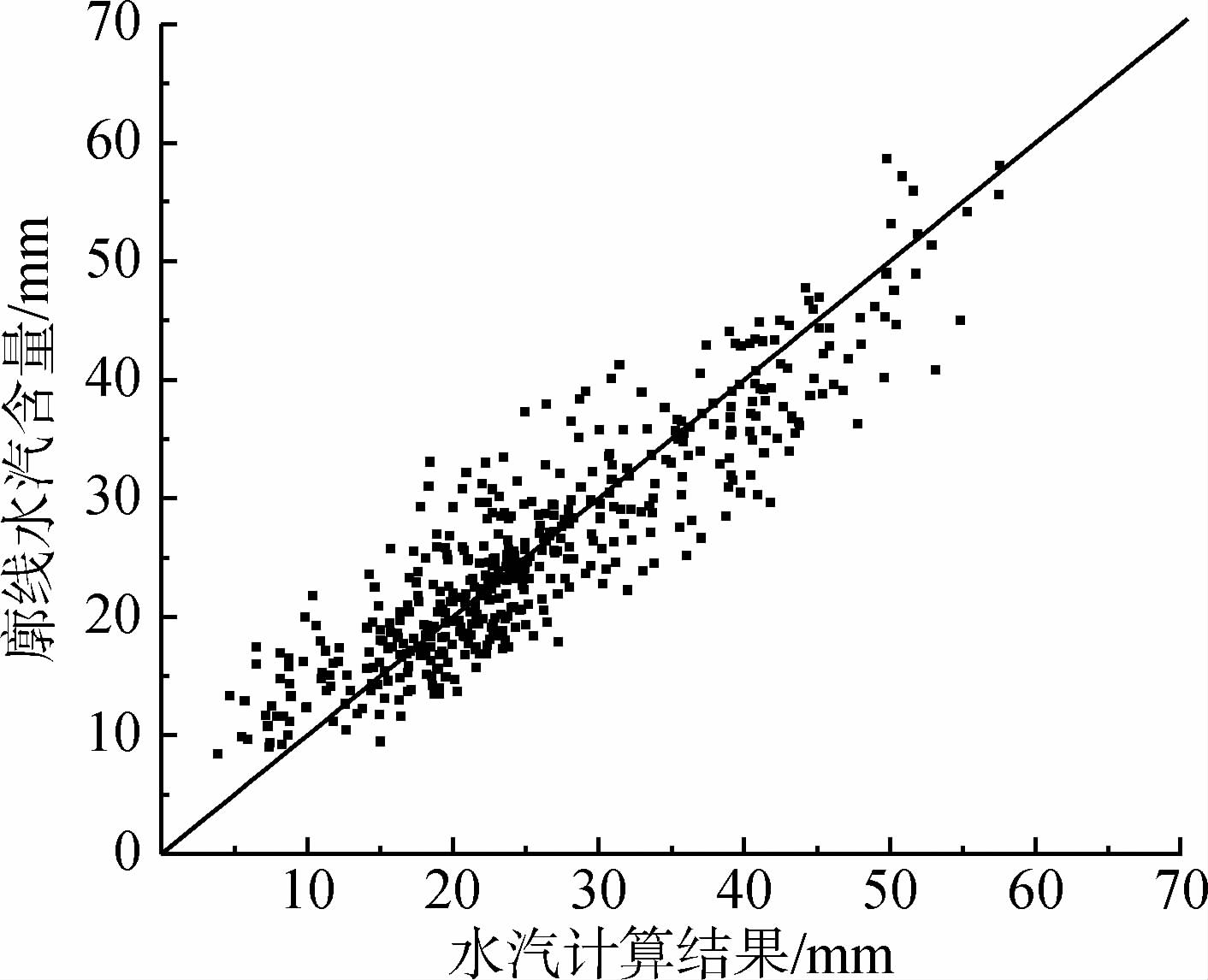
为了确定VIRS第4、第5通道的大气透过率比值和大气水汽的准确函数关系,本研究选择了2000条探空廓线数据,利用MODTRAN在VIRS的参数框架下进行了透过率模拟。选取的大气廓线水汽含量主要分布在10—40 mm,图 3给出了选取的大气廓线水汽分布情况。为了能够尽可能地代表各种水汽状况以及地表类型,在进行廓线选取的时候,基于全球的陆地探空站点进行随机选取,尽可能覆盖各种地表类型;在季节分布上,考虑到大气辐射传输在热红外波段对地表温度比较敏感,选取的廓线分布于四季,但冬季略少。通过研究发现,利用1200条以上大气廓线数据进行模拟的分裂窗通道的透过率比值和大气水汽值的关系趋于稳定,因此廓线数量的选取为2000条。对上述2000条大气廓线进行VIRS红外波段的透过率模拟,抽取其中的1500组对VIRS的分裂窗通道的透过率比值和大气水汽值进行回归,得到以下关系式:
$ PWV = 55.453({t_4}/{t_5})- 51.551 $ (8)
利用式(8),基于其余500条廓线模拟的大气透过率比值反演了大气水汽。结果与实际的大气水汽进行了对比,散点图如图 4所示。结果显示,反演结果与实际数据的相关系数为0.82,均方根误差为4.63 mm,偏差为0.52 mm。
4 结果分析
利用VIRS数据反演了北美地区2009年夏季的水汽,通过SuomiNet提供的GPS水汽探测数据对反演结果进行了验证。为保证反演结果与验证数据在时间和空间的匹配,首先在时间上选择与卫星过境时间最近的观测时段的站点观测结果,由于SuomiNet提供了半小时的GPS水汽观测数据,因此卫星数据和站点数据之间的时间匹配误差不超过半小时;其次,选择与SuomiNet站点最近的VIRS的像元数据进行对比。VIRS的反演结果和GPS反演结果的散点图如图 5所示。均方根误差(RMSE)为5.76 mm,偏差为-1.2 mm。从图 5中可以看出,北美地区夏季大气水汽结果集中在20—40 mm。
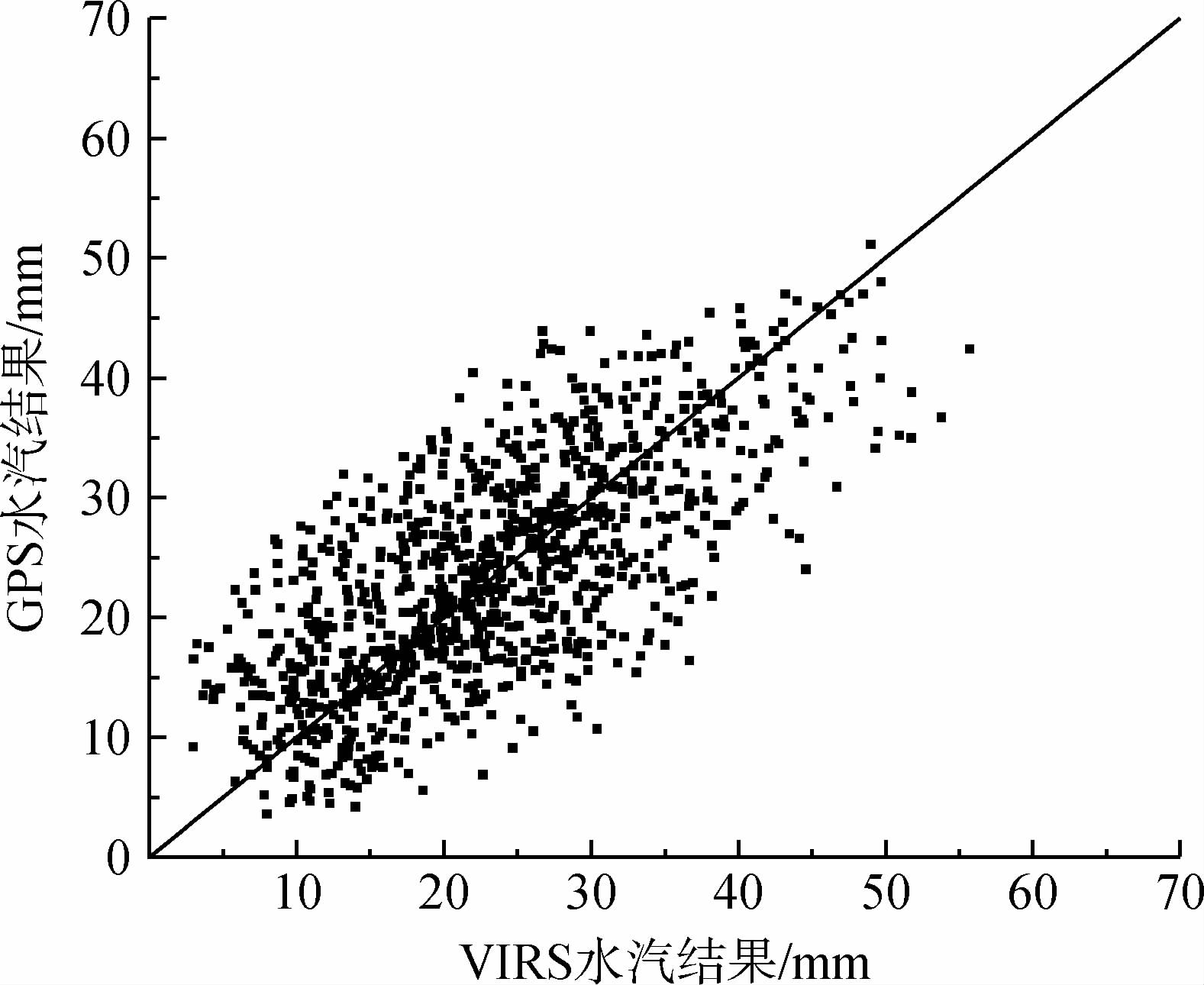
与MODIS近红外水汽反演相比,VIRS的水汽反演精度比较低。Chen等人(2008)将MODIS水汽反演结果和GPS水汽结果进行了对比,结果显示,近红外水汽的均方根误差为3.3 mm。Chang和Jin(2013)对比了美国南加利福尼亚的MODIS近红外和热红外水汽产品数据和GPS水汽数据,均方根误差分别为2.06 mm和4.07 mm。Liu等人(2013)比较了MODIS近红外水汽产品和太阳光度计的水汽反演在香港的结果,相关系数为0.822,均方根误差为2.14 mm。Bennouna等人(2013)比较了MODIS近红外水汽和GPS水汽在Iberian Peninsula的结果,均方根误差为3 mm。当地面温度与边界层温度近似相等时,热红外通道对边界层水汽不敏感,因此热红外通道更适用于高层大气水汽探测,而大部分水汽存在于低层大气,这降低了热红外通道反演水汽的精度。此外,分裂窗算法反演水汽利用的是两个红外通道对水汽敏感性的差别,显然进一步降低了热红外通道水汽反演的精度。因此,利用热红外通道与近红外通道反演水汽的结果在精度上存在一定差距。但是,利用热红外数据在白天和夜晚都可以进行水汽反演,能极大提高数据的时间分辨率,这对于近红外水汽反演是很好的补充。MODIS目前已经有基于热红外通道的水汽反演产品,本研究的反演结果与MODIS热红外水汽产品相比,精度比较接近。因此,基于VIRS的水汽反演具有应用潜力。
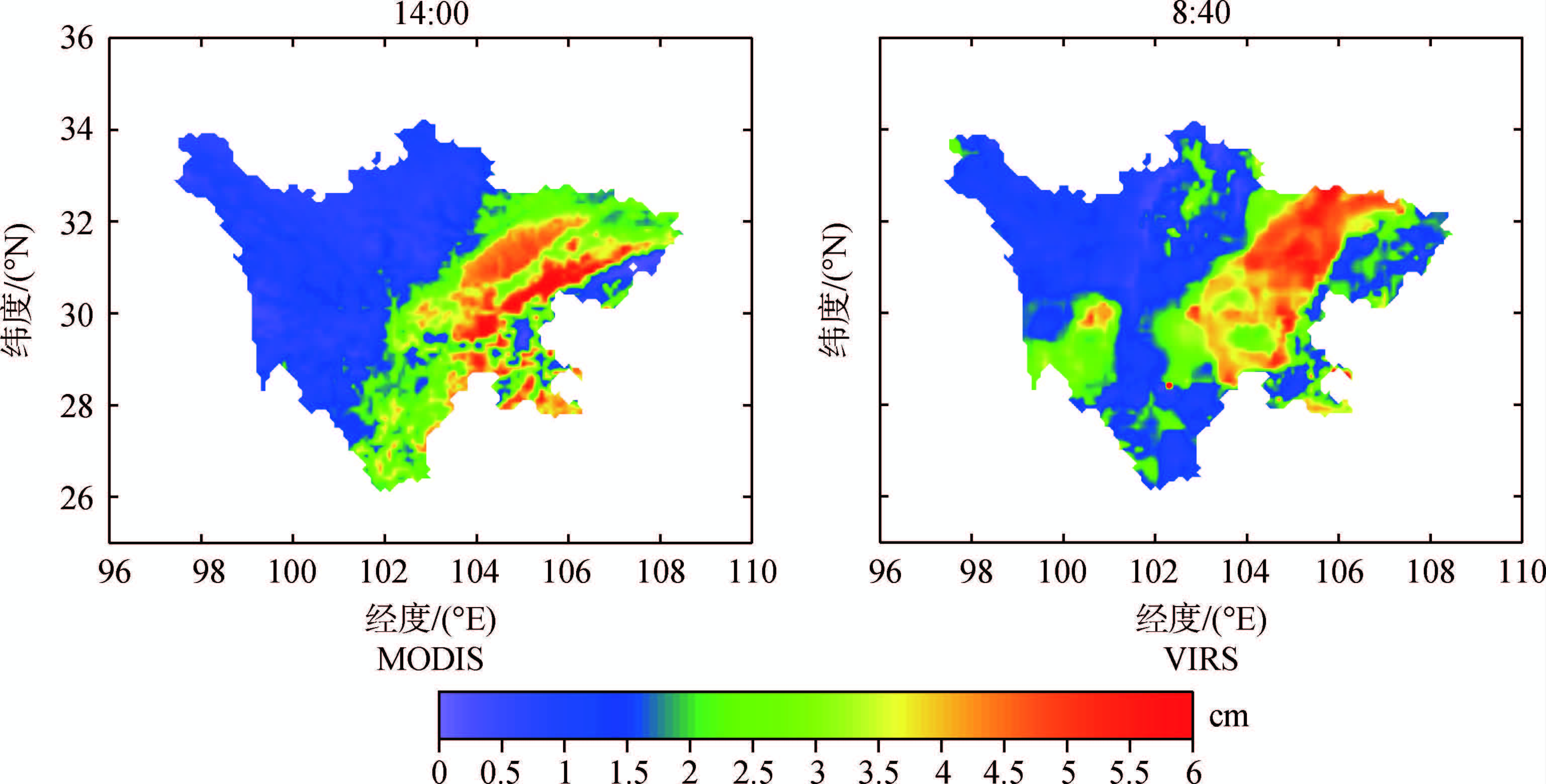
图 6为2009年8月17日VIRS过境数据的水汽反演结果,对照图 2的云中液态水数据可知,在反演过程中去除了云雨影响的区域。从图 6可以看出,反演的结果空间分布平滑。为进一步验证利用VIRS卫星数据通过分裂窗算法反演大气水汽的可靠性,本研究选取地形、气候较为复杂的四川地区进行水汽反演试验,并获取与VIRS数据时间最相近的MODIS卫星MOD05水汽产品进行对比分析。四川省地貌复杂,具有山地、丘陵、平原和高原4种地貌类型,以山地为主要特色;气候区域差异显著,垂直变化大,气候类型多。

图 7为2013年8月10日基于本文算法的水汽反演结果和MODIS近红外水汽产品的对比。可以看出,用TRMM/VIRS数据反演得到的水汽的分布规律和MODIS标准产品的基本一致,反映出用TRMM数据能够很好的反演大气水汽总量。两种数据结果都揭示出四川地区大气上空水汽含量存在的较大的空间变异性,总体特征是东部地区比西部高,最大水汽含量分布在广元、巴中等地,属于高山高原高寒气候区的川西北地区大气中水汽含量较少。就两种数据结果比较而言,在川西高原地区,TRMM数据反演结果稍高于MOIDS产品值;在川南攀枝花地区,TRMM/VIRS数据反演结果比MODIS产品值偏低。产生这种结果的原因可能是TRMM数据和MODIS数据获取时间相差5个小时,在此时间间隔内,受大气运动的影响,水汽分布本身的变化较为剧烈。
5 结 论
本研究使用TRMM/VIRS红外通道数据开展水汽反演研究,建立了基于热红外分裂窗通道的大气水汽反演算法。该方法不需要其他的辅助数据,而且白天晚上都可以获得反演结果,与可见光近红外相比具有更好的时空覆盖。通过与地基GPS水汽反演结果进行散点对比,以及与MODIS近红外水汽产品进行面状对比,发现本文方法的水汽反演结果具有较高精度,有进行业务化推广的潜力。开展该研究具有重要的意义:(1)遥感技术发展至今,已经积累了大量的长时间序列的数据,应该充分利用这些数据,极尽可能发挥它们的作用。VIRS数据目前更多地用于降水的研究,如果能够充分利用VIRS反演出水汽数据(TRMM卫星的小轨道倾角,VIRS数据的时间分辨率也比较高),显然会丰富水汽数据的来源,促进对水汽的研究;(2)中国的风云二号和风云三号卫星搭载的传感器都设置有类似的热红外通道(表 1),将分裂窗水汽反演算法用于VIRS数据进行水汽反演,建立的新算法对利用风云系列卫星传感器数据进行热红外通道的水汽反演具有借鉴意义。
后续的研究可以从以下几个方面深化:
(1)在算法的推导过程中,假设了两个分裂窗通道的地表发射率是相等的,这样的假设必然会对反演结果的精度产生影响,如果通过物理模型或者实测数据,准确刻画不同地物的两个分裂窗通道地表发射率之间的关系,对提高反演精度会有帮助。(2)N的选择主观性较强,虽然文中通过滑动窗的方法使得反演结果表面上能够和VIRS的空间分辨率一致,但是本质上并没有达到提高分辨率的效果,N的选择是建立在N个像元的大气状况一致的基础上,这不可避免地牺牲了遥感数据的空间分辨率。如果N的选择能够结合大气水汽的变化梯度进行调整,则会对反演结果产生积极的意义。(3)云检测的问题。利用热红外波段进行水汽反演,云检测无法回避。采用TMI的云产品进行判断,已经在最大限度上减小了云产品和分裂窗通道数据之间的空间异质性,但是,毕竟TMI和VIRS的成像原理以及扫描方式、空间分辨率都存在较大差异,所以如果能够用VIRS本身的数据进行云雨判断,将会有助于提高反演结果的精度。
参考文献
Bennouna Y S, Torres B, Cachorro V E, Ortiz de Galisteo J P, Toledano C, Berjón A, Fuertes D, González R and de Frutos A M. 2013. The annual cycle of total precipitable water vapor derived from different remote sensing techniques:an application to several sites of the Iberian Peninsula. AIP Conference Proceedings 1531. Berlin:AIP:296-299[DOI:10.1063/1.4804765] Chang L and Jin S G. 2013. MODIS infrared (IR) water vapor calibration model and assessment. 2013 21st International Conference on Geoinformatics (GEOINFORMATICS). Kaifeng:IEEE:1-5[DOI:10.1109/Geoinformatics.2013.6626197] Chen S H, Zhao Z, Haase J S, Chen A D and Vandenberghe F. 2008. A study of the characteristics and assimilation of retrieved MODIS total precipitable water data in severe weather simulations. Monthly Weather Review, 136(9):3608-3628[DOI:10.1175/2008MWR2384.1] Choudhury B J and DiGirolamo N E. 1995. Quantifying the effect of emissivity on the relations between AVHRR split window temperature difference and atmospheric precipitable water over land surfaces. Remote Sensing of Environment, 54(3):313-323[DOI:10.1016/0034-4257(95) 00172-7] Dalu G. 1986.Satellite remote sensing of atmospheric water vapour. International Journal of Remote Sensing, 7(9):1089-1097 Gao F L, Hua Z Z, Cui G M, Tao L R. 2013. Impacts of water-vapor concentration variation on greenhouse effect:quantitative analysis. Environmental Science and Technology, 36(8):182-186 (高凤玲, 华泽钊, 崔国民, 陶乐仁. 2013. 水汽浓度变化对温室效应影响的定量分析. 环境科学与技术, 36(8):182-186) Gopalan K, Wang N Y, Ferraro R and Liu C T. 2010. Status of the TRMM 2A12 land precipitation algorithm. Journal of Atmospheric and Oceanic Technology, 27(8):1343-1354[DOI:10.1175/2010JTECHA1454.1] Harris A R and Mason I M. 1992. An extension to the split-window technique giving improved atmospheric correction and total water vapour. International Journal of Remote Sensing, 13(5):881-892[DOI:10.1080/01431169208904161] He L M, Wang H, Yan G J, Li X W, Zhu W J and Wang J D. 2003. Analysis and application for the empirical relative between aerosol optical depth and horizontal meteorological range. Journal of Remote Sensing, 7(5):372-378 (何立明, 王华, 阎广建, 李小文, 朱文娇, 王锦地. 2003.气溶胶光学厚度与水平气象视距相互转换的经验公式及其应用. 遥感学报, 7(5):372-378) Intergovernmental Panel on Climate Change. 2007. Climate Change 2007:The Physical Science Basis. New York:Cambridge University Press:591-662 Jedlovec G J. 1990. Precipitable water estimation from high-resolution split window radiance measurements. Journal of Applied Meteorology, 29(9):863-877[DOI:10.1175/1520-0450(1990)029<0863:PWEFHR>2.0.CO;2] Justice C O, Eck T F, Tanré D and Holben B N. 1991. The effect of water vapour on the normalized difference vegetation Index derived for the Sahelian region from NOAA AVHRR data. International Journal of Remote Sensing, 12(6):1165-1187[DOI:10.1080/01431169108929720] Kleespies T J and McMillin L M. 1990. Retrieval of precipitable water from observations in the split window over varying surface temperatures. Journal of Applied Meteorology, 29(9):851-862[DOI:10.1175/1520-0450(1990)029<0851:ROPWFO>2.0.CO;2] Kummerow C, Barnes W, Kozu T, Shiue J and Simpson J. 1998. The tropical rainfall measuring mission (TRMM) sensor package. Journal of Atmospheric and Oceanic Technology, 15(3):809-817[DOI:10.1175/1520-0426(1998)015<0809:TTRMMT>2.0.CO;2] Li X F, Li Y, Zeng Q M and Zhao Y H. 2009. Correction of atmospheric effects on repeat-pass interferometric SAR using MERIS and ASAR synchronous data. Acta Scientiarum Naturalium Universitatis Pekinensis, 45(6):1012-1018 (李小凡, 李颖, 曾琪明, 赵永红. 2009. 应用与ASAR同步的MERIS对重复轨道InSAR进行大气校正. 北京大学学报(自然科学版), 45(6):1012-1018) Li Z L, Jia L, Su Z B, Wan Z M and Zhang R H. 2003. A new approach for retrieving precipitable water from ATSR2 split-window channel data over land area. International Journal of Remote Sensing, 24(24):5095-5117[DOI:10.1080/0143116031000096014] Liu X T, Liu Q, Fu Y F and Cheng J. 2010. Daytime cloud detection scheme relying on five-channel measurements from TRMM VIRS. Journal of Atmospheric and Environmental Optics, 5(2):128-140 (刘显通, 刘奇, 傅云飞, 程静. 2010.基于TRMM VIRS可见光和红外五通道的白天云检测方案. 大气与环境光学学报, 5(2):128-140) Liu Z Z, Wong M S, Nicol J and Chan P W. 2013. A multi-sensor study of water vapour from radiosonde, MODIS and AERONET:a case study of Hong Kong. International Journal of Climatology, 33(1):109-120[DOI:10.1002/joc.3412] Nakamura H, Koizumi K and Mannoji N. 2004. Data assimilation of GPS precipitable water vapor into the JMA mesoscale numerical weather prediction model and its impact on rainfall forecast. Journal of the Meteorological Society of Japan, 82(1B):441-452[DOI:10.2151/jmsj.2004.441] Ottle C, Outalha S, FranCois C and Le Maguer S. 1997. Estimation of total atmospheric water vapor content from split-window radiance measurements. Remote Sensing of Environment, 61(3):410-418[DOI:10.1016/S0034-4257(97)00055-2] Schroedter-Homscheidt M, Drews A and Heise S. 2008. Total water vapor column retrieval from MSG-SEVIRI split window measurements exploiting the daily cycle of land surface temperatures. Remote Sensing of Environment, 112(1):249-258[DOI:10.1016/j.rse.2007.05.006] Simpson J, Kummerow C, Tao W K and Adler R F. 1996. On the tropical rainfall measuring mission (TRMM). Meteorology and Atmospheric Physics, 60(1/3):19-36[DOI:10.1007/BF01029783] Smith T L, Benjamin S G, Schwartz B E and Gutman S I. 2000. Using GPS-IPW in a 4-D data assimilation system. Earth, Planets and Space, 52(11):921-926[DOI:10.1186/BF03352306] Sobrino J A, Li Z L, Stoll M P and Becker F. 1994. Improvements in the split-window technique for land surface temperature determination. IEEE Transactions on Geoscience and Remote Sensing, 32(2):243-253[DOI:10.1109/36.295038] Sobrino J A, Raissouni N, Simarro J, Nerry F and Petitcolin F. 1999. Atmospheric water vapor content over land surfaces derived from the AVHRR data:application to the Iberian Peninsula. IEEE Transactions on Geoscience and Remote Sensing, 37(3):1425-1434[DOI:10.1109/36.763306] Vermote E F, El Saleous N Z and Justice C O. 2002. Atmospheric correction of MODIS data in the visible to middle infrared:first results. Remote Sensing of Environment, 83(1/2):97-111[DOI:10.1016/S0034-4257(02)00089-5] Ware R H, Fulker D W, Stein S A, Anderson D N, Avery S K, Clark R D, Droegemeier K K, Kuettner J P, Minster J B and Sorooshian S. 2000. SuomiNet:a real-time national GPS network for atmospheric research and education. Bulletin of the American Meteorological Society, 81(4):677-694[DOI:10.1175/1520-0477(2000)081] Zhang T T, Wen J, van der Velde R, Meng X H, Li Z C, Liu Y Y and Liu R. 2008. Estimation of the total atmospheric water vapor content and land surface temperature based on AATSR thermal data. Sensors, 8(3):1832-1845[DOI:10.3390/s8031832] Retrieval of precipitable water vapor over land using TRMM/VIRS thermal split window measurements WANG Yongqian1,2,3
,
SHI Jiancheng3
,
ZENG Qiaolin1
,
WANG Hao4
,
FENG Wenlan1
1. College of Environmental and Resource Science, Chengdu University of Information Technology, Chengdu 610225, China;2. Chongqing Institute of Meteorological Sciences, Chongqing, 401147, China;3. State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing and Digital Earth, Chinese Academy of Sciences, Beijing 100101, China;4. College of Electronic Engineering, Chengdu University of Information Technology, Chengdu 610225, China
WANG Yongqian1,2,3
,
SHI Jiancheng3
,
ZENG Qiaolin1
,
WANG Hao4
,
FENG Wenlan1
1. College of Environmental and Resource Science, Chengdu University of Information Technology, Chengdu 610225, China;2. Chongqing Institute of Meteorological Sciences, Chongqing, 401147, China;3. State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing and Digital Earth, Chinese Academy of Sciences, Beijing 100101, China;4. College of Electronic Engineering, Chengdu University of Information Technology, Chengdu 610225, ChinaAbstract
Water vapor plays a crucial role in atmospheric processes that act over a wide range of temporal and spatial scales, from global climate to micrometeorology. Determining water vapor distribution in the atmosphere and its changing pattern is very important. The algorithm based on some satellite remote sensors is mature (i.e., moderate resolution imaging spectra-radiometer (MODIS)). Water vapor inversion algorithms based on other sensors remain in the scientific research stage or has no corresponding water vapor algorithm (i.e., Tropical Rainfall Measuring Mission (TRMM) and Visible and Infrared Radiometer System (VIRS)). TRMM/VIRS data were widely used to study precipitation. This paper uses thermal infrared split window channels at 10.8 μm and 12.0 μm of VIRS to retrieve Precipitable Water Vapor (PWV). An improved physically based algorithm for the retrieval of PWV over cloud-free land surfaces was applied in this paper. First, the Split-Window Covariance-Variance Ratio (SWCVR) method was reviewed. The surface emissivities of the two split window channels were assumed equal. Moving window method was adopted to keep the spatial resolution of the original data. Then, an operational use of this method was developed and applied to VIRS datasets. Cloud liquid water information obtained from TRMM Microwave Imager (TMI) was used to identify the clear sky area. Given that TMI and VIRS are both mounted on the TRMM satellite, the data obtained by the two instruments are consistent in time and space and avoid data match problems. A total of 2000 radiosonde profiles were input into MODTRAN to simulate the brightness temperatures under the configuration of VIRS and find the relationship between the transmittance of the two split window channels and PWV. The profiles used in this research were randomly selected from the land sounding sites around the world to represent all kinds of water vapor condition and types of surface. The profiles were evenly distributed in the four seasons, although winter has slightly fewer profiles. Compared with the GPS results, the root mean square error of the results is 5.76 mm, and the bias is -1.2 mm for the research area. Regional consistency was found between the results obtained by MODIS and the proposed algorithm. The proposed algorithm can yield reasonable results that are accurate in most cases with a split-window technique using VIRS data. Validation results indicate that the PWV retrieved by VIRS has high precision,and has a reference meaning to China FY data for retrieving PWV based on infrared split window channels. However, the precision of the algorithm in this paper was lower than the PWV results retrieved by MODIS near infrared data. The infrared channels were sensitive to the PWV in the upper atmosphere, whereas most of the PWV existed in low atmosphere. Accuracy was almost the same between the PWV retrieved by the infrared data of MODIS and the results in this paper. Few preliminary results were obtained by the present study, but the existing algorithm can be further developed and improved to reach the degree of business.
Key words
precipitable water vapor; infrared; split window; VIRS; TRMM


