|
|
|
投稿时间: 2015-05-13; 修订日期: 2015-09-28; 优先数字出版日期:2015-10-08
基金项目: 国家高技术研究发展计划(863计划)(编号:2013AA102401);国家自然科学基金(编号:31270744);中央高校基本科研业务费专项资金(编号:2014QC018);地理国情监测国家测绘地理信息局重点实验室项目(编号:2013NGC05)
中图分类号: P237
文献标识码: A
文章编号: 1007-4619(2016)01-0129-09
|
摘要
针对高空间分辨率的遥感影像,提出了一种基于多尺度分割的变化检测算法。采用Mean-Shift分割算法对影像进行多尺度分割,构建了不同尺度上的地理对象,以不同尺度上的地理对象灰度均值构建了变化检测的多尺度特征向量,采用变化矢量分析法获得最后的变化检测结果。以城镇区和农田区的QuickBird影像对本文算法进行了检验,从精度评价的效果来看,无论城镇区还是农田区,采用面向对象的变化检测方法精度都高于基于单像素的检测方法,且当尺度层数固定时,多尺度组合的变化检测结果优于单一尺度的变化检测结果,对城镇、农田区域的变化检测的精度分别达到87.57%和81.55%。本文算法既可以顾及大面积同质区域变化,又可以反映小的地物目标及边缘部分的变化,能够很好地满足城镇、农田等不同环境背景下的变化检测需求,在国土资源监测中具有一定的应用价值。
关键词
变化检测;多尺度分割;地理对象;高分辨率遥感影像;Mean-Shift;变化矢量分析
1 引 言
利用遥感影像检测地表覆盖、地物目标的变化一直是遥感应用研究的热点问题(李德仁,2003;孙晓霞等,2011)。很多学者利用中低分辨率的遥感影像进行变化检测(Bruzzone和Prieto,2000;佃袁勇,2005;万幼川等,2008;Daniel和Victor,2012)。这些算法大多采用非监督的变化检测算法,在像素水平上利用遥感影像的波谱差异进行地表覆盖的变化检测,即通过对两个不同时期的影像在像素水平上通过差值、比值等代数运算获得差异影像,然后根据阈值分割、最大数学期望(EM)、循环迭代等算法确定变化阈值,根据变化阈值做二值分割,进而提取变化区域(柳思聪等2011)。但是,在针对WorldView、Geoeye-1、QuickBird和Ikonos等高分辨率遥感影像时,地物目标往往由一定区域大小的像素所构成,且像素间具有一定的相关性,以像素为单位的变化检测算法没有考虑每个像素的空间邻域特征,在进行变化检测时存在一定的局限性(Bruzzone和Prieto,2002;佃袁勇,2005)。随着面向地理对象(geographic object-based)的影像分析方法的发展,将具有相似特征的像素点组合在一起,形成具有特定几何形状、大小和纹理等特征的地理对象,以地理对象为单位利用其属性特征进行变化检测,能够更好地体现变化发生的区域性特点,在针对高分率影像检测时能使检测的结果更加合理客观。目前已有一些基于地理对象的变化检测方法(Hazel,2001;王琰等,2012;Chen等,2012,2013;Lu等,2011;Lizarazo,2012; Dronova等2011;Hichri等2013),但这些算法中在地理对象获取的过程中往往只是利用单一的尺度进行分割,而实际上高分辨率的影像具有多尺度的特性,利用单一尺度分割影像必然会存在过分割或不完全分割的情况,如果地物面积过大,而采用较小的尺度必然导致分割过于破碎,反之如果地物面积小,而采用较大尺度分割,必然导致分割不完全(Bazi等,2010;Blaschke,2010;Bovolo,2009;Bruzzone和Carlin,2006;Inglada和Mercier,2007;佃袁勇等,2014)。对不同面积的地物来说多尺度分割可以获得更全面的地物目标的特征,将这些多尺度的地物特征用于变化检测能更好地反映地物的变化。
针对地物的多尺度特性,一些学者提出了多尺度的影像变化检测方法(Bruzzone和Carlin,2006;Celik,2009;Bovolo,2009;Marchesi等,2010;陆苗等,2015)。这些算法通过构建不同尺度上对象及其特征变量进行变化检测。构建多尺度对象时采用的方法主要有对同一分辨率影像进行变换的方法(如利用离散小波变换)、对同一分辨率影像进行多尺度分割的方法,或者利用同一传感器的全色、多光谱等不同分辨率影像构建多尺度对象。在选择多尺度对象特征时一般选择光谱、几何形状等参数作为多尺度的特征变量。
基于以上研究,本文针对高空间分辨率影像提出了基于多尺度分割的变化检测算法。通过对变化前后的高分辨率影像分别进行多尺度分割,提取多尺度地理对象,然后利用变化矢量分析法结合地理对象灰度属性特征,采用EM算法自动提取变化阈值,进行变化检测。以QuickBird影像为例,对城镇、农田两组不同的地物背景数据验证了本文算法的有效性。
2 研究方法
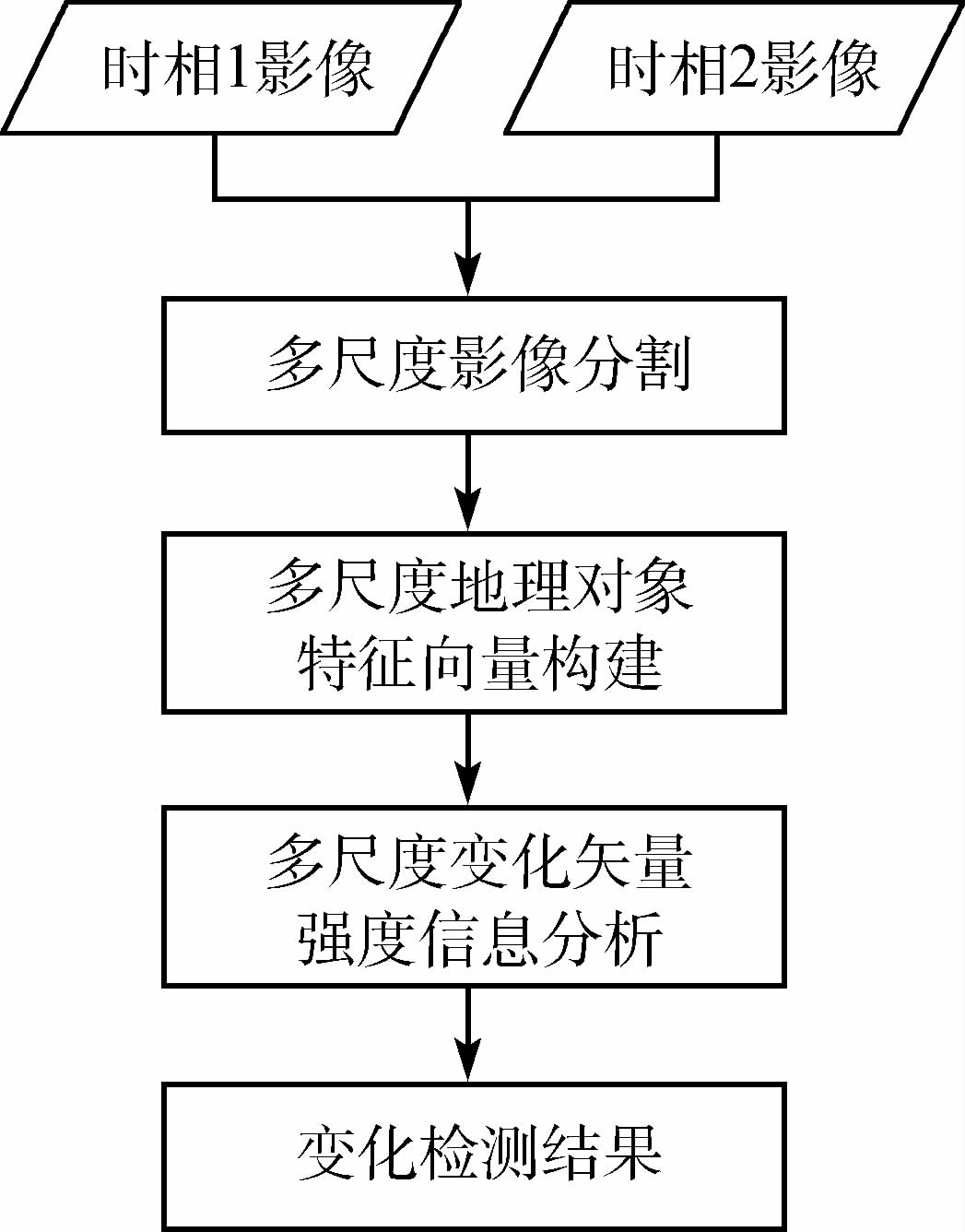
对于已经配准好的两个不同时期同一区域的高分辨率遥感影像,多尺度分割变化检测共分为3个步骤(图 1):(1)利用Mean-shift影像分割算法(Comaniciu和Meer,2002;Ming等2012)对不同时相的影像进行多尺度分割,形成不同尺度的地理对象;(2)多尺度地理对象的特征提取与特征向量构建;(3)基于变化矢量法CVA(change vector analysis)(Johnson和Kasischke,1998;Bovolo和Bruzzone,2007;Carvalho Júnior等,2011;Liu等,2015)对不同时相多尺度地理对象特征向量进行变化检测,提取不同时期间变化强度信息,进而利用阈值分割方法获取的最终的变化检测的结果。
2.1 多尺度影像分割
影像分割是将具有相同特征的像素聚集在一起,形成能反映特定特征的地理对象。但是对于高分辨率影像,选择不同的分割尺度时,分割结果不同。由于地物的结构、纹理、空间特征以及相邻地物的关系等信息十分丰富,采用单一尺度分割,必然会出现过分割或者分割不完全等情况,很难完整地反映对象的特征。而通过多尺度分割,形成了多个地理对象层,可以从不同的角度反映遥感数据的客观表现形态,为描述地理对象的多尺度特征提供了很好的基础。本文采用Mean-Shift分割算法结合分割后区域合并算法,自下而上,从单像素开始,建立多尺度地理对象。具体步骤为:
步骤1 采用Mean-Shift分割算法,形成初始分割结果,并对分割结果进行标记,统计邻接关系,得到区域邻接图,获得最初始的地理对象。
步骤2 对步骤1中形成的地理对象,根据区域相似性准则对相邻的地理对象进行合并,形成高一层次的地理对象。区域相似性准则考虑区域的灰度相似性、公共边缘强度以及区域的面积作为相似性度量Z的依据。具体公式为:
$Z\left( {{R_i},{R_j}} \right) = \frac{1}{{{D_{{R_i}{R_j}}}{E_{{R_i}{R_j}}}{A_{{R_i}{R_j}}} + 1}}$ (1)
式中,DRiRj表示面积加权灰度均值距离,具体见式(2),ERiRj表示相邻地理对象边缘梯度差值,ARiRj表示地理对象的邻接关系。
${D_{{R_i}{R_j}}} = \frac{{N\left({{R_i}} \right)N\left({{R_j}} \right)}}{{N\left({{R_i}} \right)+ N\left({{R_j}} \right)}}\left({\left\| {{\mu _{{R_i}}} - {\mu _{{R_j}}}} \right\|} \right)$ (2)
${E_{{R_i}{R_j}}} = \left\| {MG\left({{R_i}} \right)- MG\left({{R_j}} \right)} \right\|$ (3)
$ {A_{{R_i}{R_j}}} = \left\{ \begin{array}{l}1,\;\;\;\;\;\;{R_i}与{R_j}邻接\;\;\;\\ + \infty \;\;{R_i}与{R_j}不邻接\;\;\end{array} \right. $ (4)
式中,i、j分别表示地理对象的编号,N(Ri)和 N(Rj)分别表示邻接区域的像素数量,μ表示邻接区域的灰度均值,MG表示区域边缘处的梯度均值。
采用基于最大区域熵的方法对图像区域进行合并,合并停止准则采用图像区域最大熵值,原因是从信息论的角度看,灰度变化小的地方其信息量少,局部熵值小;灰度变化大的地方信息量多,局部熵值大。信息熵的计算见式(5)。pkl 表示在地理对象Ri中,像素位置(k,l)上的灰度出现的频率。
$H\left( {{R_i}} \right) = - \sum {_{\left( {k,l} \right) \in {R_i}}{P_{kl}}In\left( {{P_{kl}}} \right)} $ (5)
${P_{kl}} = \frac{{f(k,l)}}{{\sum {_{\left( {k,l} \right) \in {R_i}}f\left( {{P_{kl}}} \right)} }}$ (6)
相邻两区域合并的规则如下:先计算某一区域的信息熵,然后将其与相邻区域合并,再重新计算区域熵,如果合并后的区域熵小于合并前的区域熵,则这两个区域是相似的,可以合并,否则不能合并。
步骤3 重复步骤2直到对所有的区域遍历。
步骤4 重复步骤2和步骤3直到完成整个多尺度地理对象构建。
2.2 多尺度地理对象特征提取
通过Mean-Shift分割算法结合分割后区域合并的策略,建立了多个尺度上地理对象的分割结果。对每一个尺度上的地理对象,需要提取该尺度上地理对象的特征参数来反映该地理对象的特征。本文选择地理对象中所有像素的灰度均值向量作为特征向量衡量变化前后的差异,因为该特征计算最方便,且反映的变化特征最明显。对每一个像素来说,构建的多尺度地理对象特征向量可以描述为:
$M\left( {k{\rm{,}}l} \right) = \left\{ {x\left( {k{\rm{,}}l} \right){\rm{,}}{\mu ^1}\left( {k{\rm{,}}l} \right){\rm{,}} \ldots {\mu ^1}\left( {k{\rm{,}}l} \right)} \right\}$ (7)
式中,
${\mu ^1} = \frac{1}{{{N_i}}}{\sum _{\left( {k{\rm{,}}l} \right)}}_{ \in {R_i}}x\left( {k{\rm{,}}l} \right)$ (8)
式中,k、l表示影像上的像素点坐标,Ri表示第i个地理对象的所有像素集合,Ni表示第i个地理对象的像素个数,μ表示地理对象的灰度均值,L表示尺度的层数。
采用多尺度分割算法的目的不是找出地理对象的最佳分割尺度,而是建立每一个像素不同层次的空间邻域信息。分割层数L的选择取决于影像的几何分辨率以及需要检测的地物对象大小。确定L的原则是:第L层分割的地理对象的平均面积不大于需要检测的地物对象面积(Bruzzone和Carlin,2006)(式(9))。
$\frac{{\sum\limits_{i = 1}^{{N^L}} {A_i^L} }}{{{N^L}}} \le E{A_{th}}$ (9)
式中,NL表示第L层的地理对象数量,Ai表示第i个地理对象的面积(以像素为单位),EAth表示需要检测的地物对象面积(以像素为单位)。
本文中根据所采用影像的空间分辨率确定为5层,初始的第一层地理对象认为是单个像素。
2.3 多尺度地理对象特征提取
式(7)构建的地理对象的特征向量,代表了每一个像素在不同分割尺度上的灰度均值特征,反映了每个像素的多尺度空间邻域信息。通过计算每一个像素所在地理对象中的特征向量M(k,l),然后利用CVA算法(Johnson和Kasischke,1998;Bovolo和Bruzzone,2007;Carvalho Júnior等,2011;Liu等,2015)直接计算两个不同时期的特征向量的强度差异,构建面向地理对象的差异强度信息。这种在像素水平上计算的差异值,反映了该像素所在的空间区域的信息,计算如式(10)所示。
${M_D}\left( {k{\rm{,}}l} \right) = \left\| {{M_{t1}}\left( {k{\rm{,}}l} \right) - {M_{t2}}\left( {k{\rm{,}}l} \right)} \right\|$ (10)
对于形成的差异强度信息MD,根据阈值可以判断变化与非变化的区域。本文采用了基于最大期望(EM)的自动阈值选择算法(佃袁勇,2005)。
3 实验结果与分析
3.1 试验数据
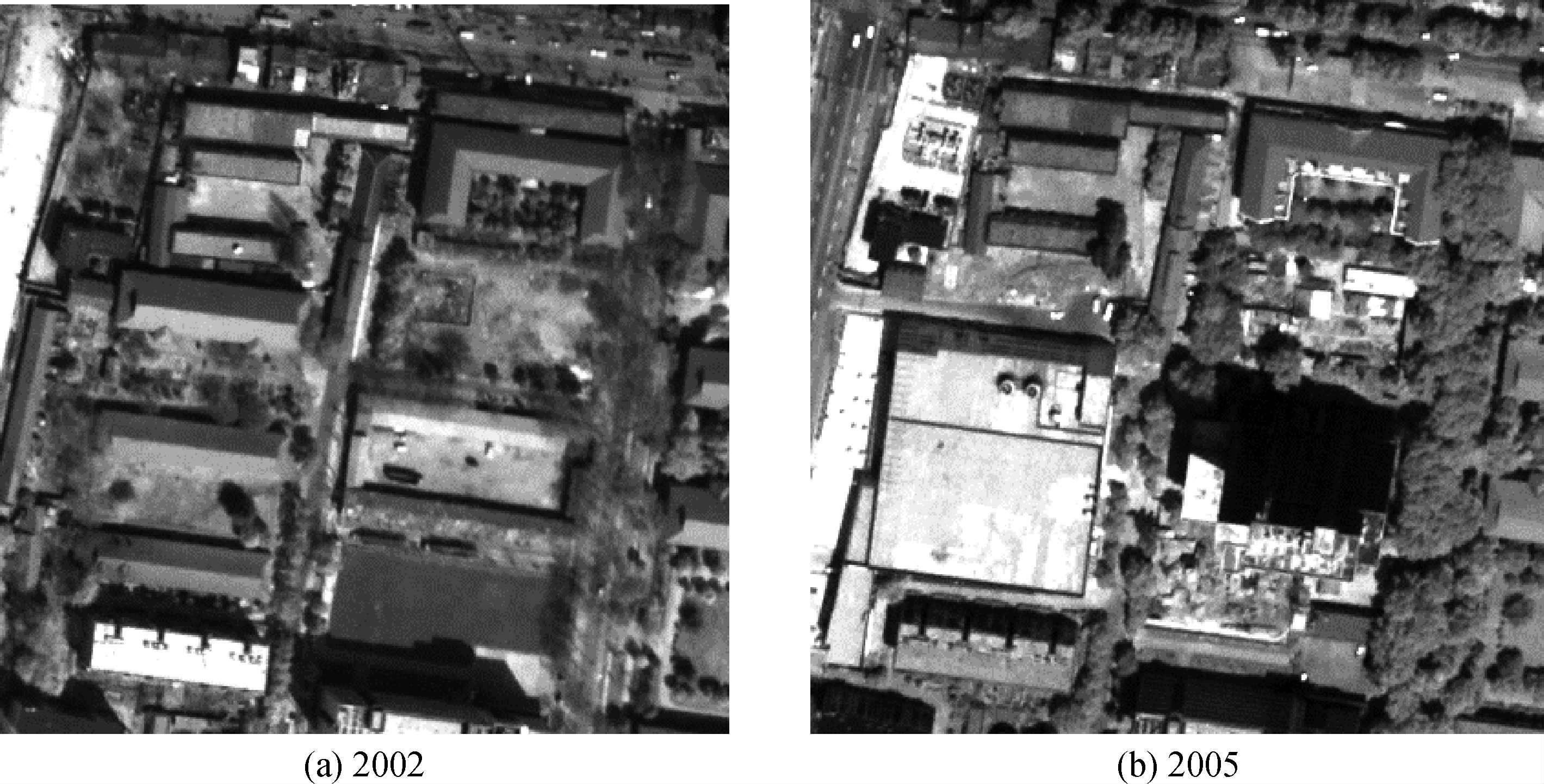
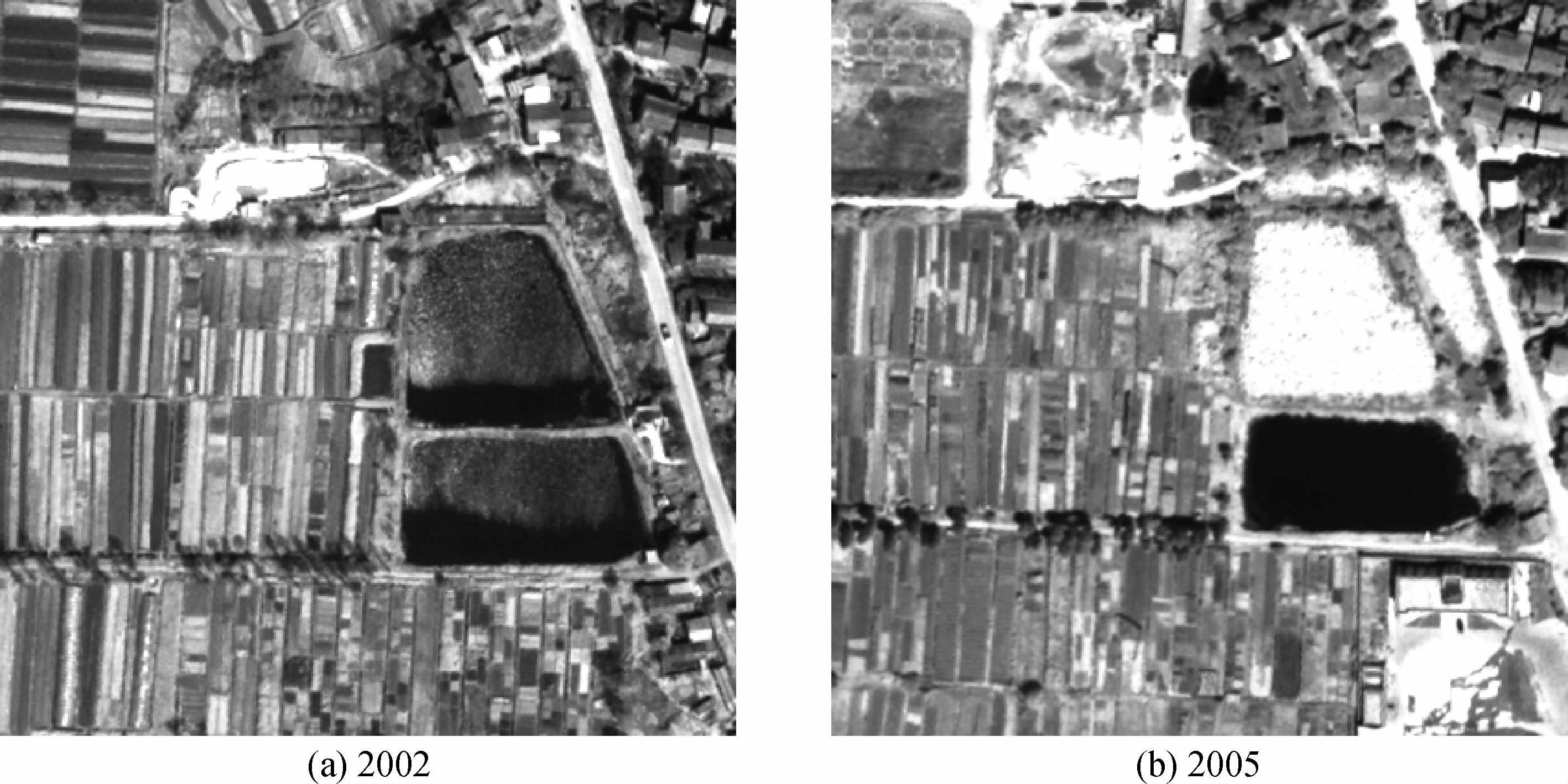
选取QuickBird全色波段高分辨率影像数据进行实验(包括城镇区和农田区两组不同地理背景下的影像),检验算法的有效性。所有影像数据均已提前配准,影像灰度级均为256级,空间分辨率为0.6 m,影像大小为400×400像素,如图 2、图 3所示。
3.2 结果与分析
为比较评估变化检测精度,以城镇和农田两种地表覆盖背景为例,比较了单一尺度的面相对象的变化检测结果与不同多尺度信息组合的面向对象的变化检测结果。首先,利用Mean-Shift算法进行分割,获得初始的分割结果;然后利用多尺度影像分割算法,在初始分割的结果上,进行区域合并,最终形成了城镇、农田区域5个尺度的分割结果(图 4—6)以及相应的地理对象的统计信息(表 1)。从表 1中可以发现,随着尺度的增大城镇、农田区域地理对象数量逐渐变小,地理对象的平均面积逐渐增大。
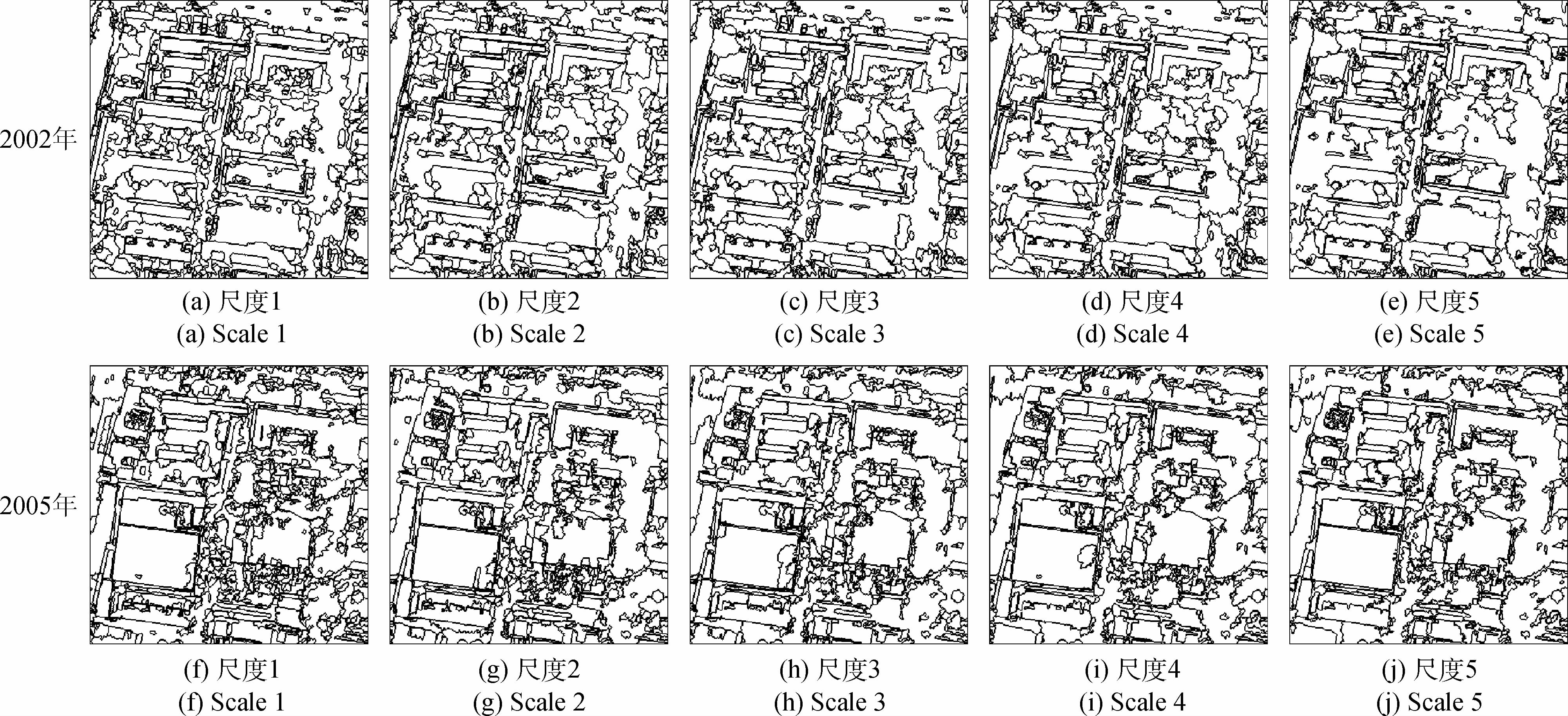
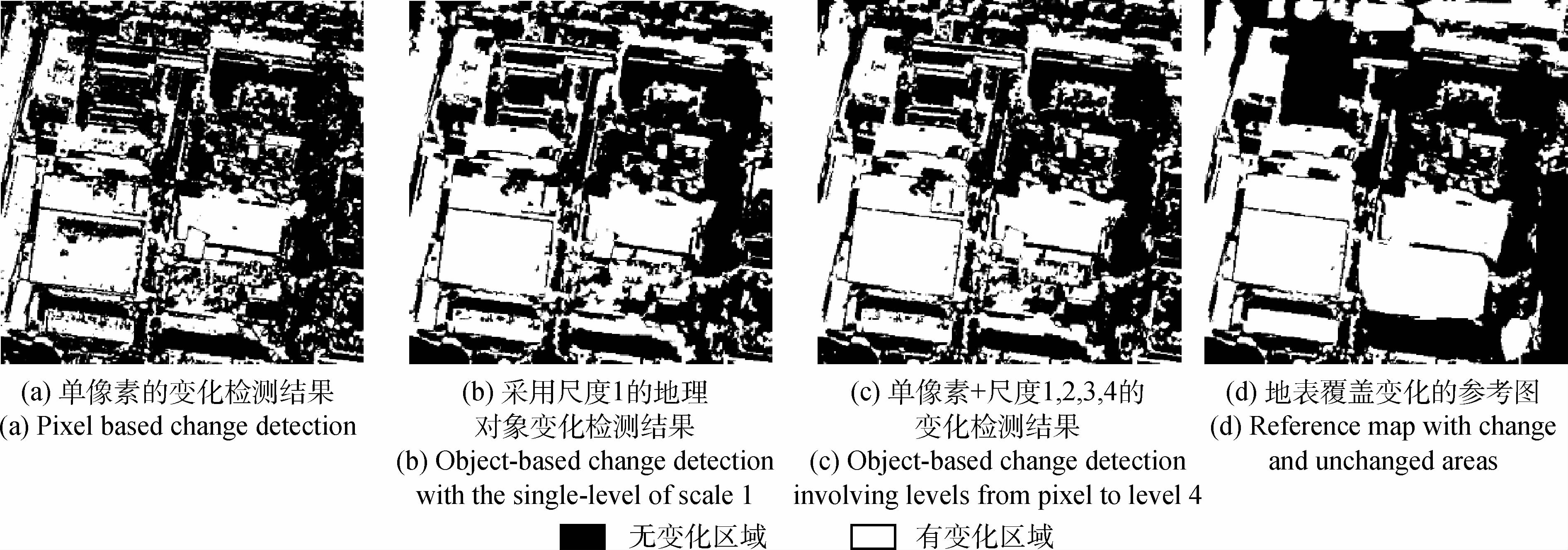
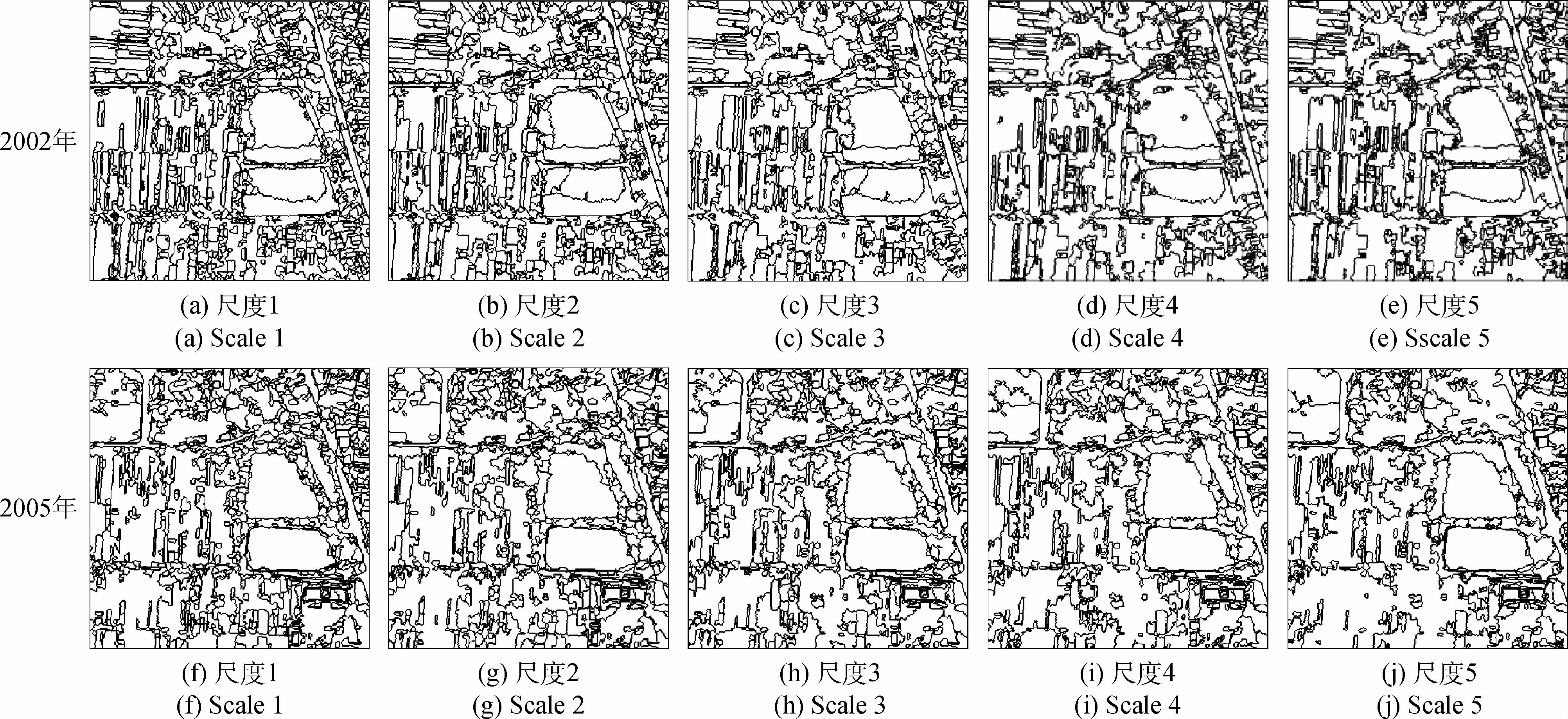
Table 1 Geo-object number and mean object area in different segment scale 下载CSV
| 分割尺度 | 城镇区域 | 农田区域 | ||||
| 地理对象数量/个 | 地理对象平均 面积/像素 | 地理对象数量/个 | 地理对象平均 面积/像素 | |||
| 变化前 | 变化后 | 变化前 | 变化后 | |||
| 尺度1 | 663 | 806 | 217.8 | 875 | 809 | 190.0 |
| 尺度2 | 519 | 600 | 286.0 | 653 | 653 | 245.0 |
| 尺度3 | 423 | 538 | 333.0 | 521 | 512 | 309.8 |
| 尺度4 | 359 | 472 | 385.1 | 483 | 437 | 347.8 |
| 尺度5 | 332 | 442 | 413.4 | 449 | 386 | 383.2 |
对提取的各尺度的地理对象,提取灰度均值构建特征向量,利用CVA方法计算变化矢量强度信息,并采用EM算法自动提取变化阈值,得到最终的变化结果。为评估变化检测结果的精度,采用目视解译和现场实地调查相结合的方法获得城镇、农田区域地面真实变化信息(图 5(d)和图 7(d)),以此为基础评估本文中的变化检测算法。表 2显示了单像素、单一尺度的面相对象的变化检测结果精度,表 3显示了单像素与5个不同尺度组合下面向对象的变化检测结果。从表 2、表 3中可以发现针对高分辨率影像,无论时城镇区域还是农田区域,采用面向对象的变化检测方法精度要高于基于单像素的检测方法,且当尺度层数固定时,多尺度组合的变化检测结果要优于单一尺度的变化检测结果。从表 3中可以发现,当有5层尺度时(单像素与尺度1—4组合),在城镇区域可以达到最好的检测效果,检测精度可达87.57%;对于农田区域,当有5层尺度时(单像素与尺度1—4组合),可以达到最好的检测效果,检测精度可达81.55%。
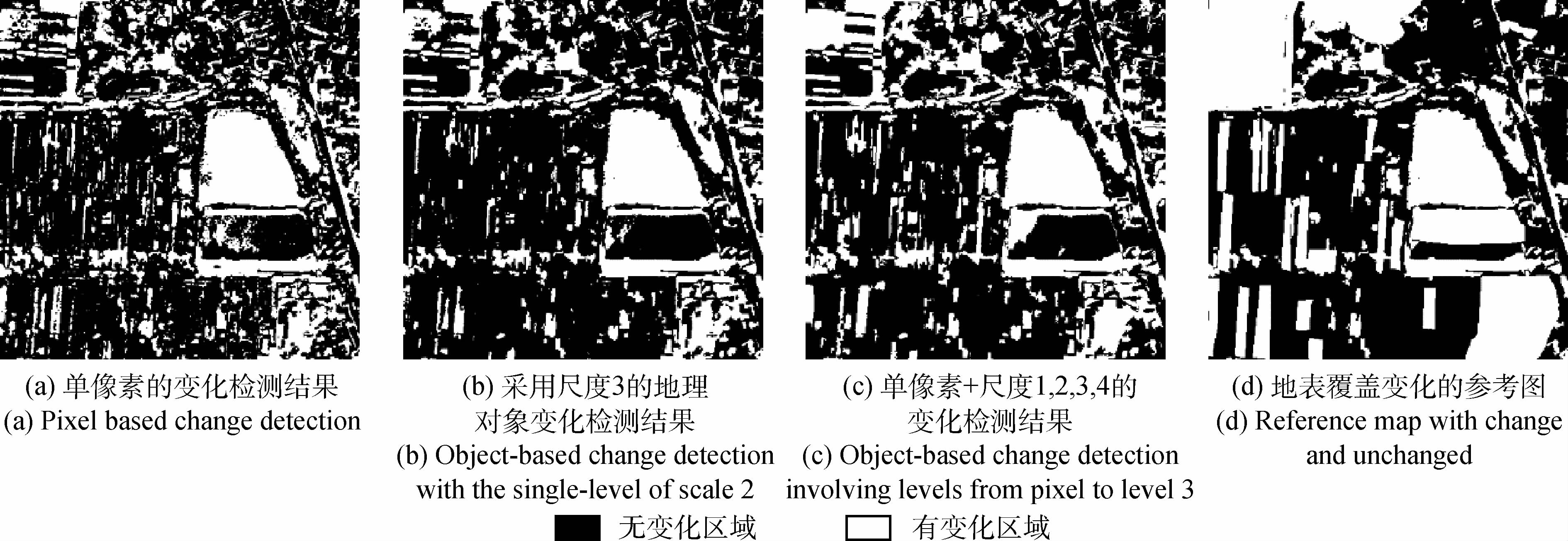
Table 2 Change detection precision in pixel-based and single level object-based methods 下载CSV
| 变化检测中的尺度 | 城镇区域 | 农田区域 | ||||||
| EM分割阈值 | 漏检率/% | 误检率/% | 检测精度/% | EM分割阈值 | 漏检率/% | 误检率/% | 检测精度/% | |
| 单像素 | 62 | 26.37 | 14.47 | 80.57 | 75 | 39.20 | 19.71 | 76.77 |
| 尺度1 | 60 | 19.78 | 13.70 | 83.73 | 75 | 36.70 | 17.29 | 78.57 |
| 尺度2 | 58 | 18.59 | 14.90 | 83.56 | 81 | 40.17 | 12.45 | 79.11 |
| 尺度3 | 54 | 18.29 | 16.11 | 82.99 | 70 | 33.95 | 17.64 | 79.36 |
| 尺度4 | 51 | 16.83 | 19.60 | 81.43 | 80 | 42.96 | 12.22 | 78.15 |
| 尺度5 | 55 | 21.70 | 16.81 | 81.22 | 62 | 28.23 | 23.75 | 78.29 |
| 变化检测中 的尺度 | 城镇区域 | 农田区域 | ||||||
| EM分割 阈值 | 漏检率/% | 误检率/% | 检测精度/% | EM分割 阈值 | 漏检率/% | 误检率/% | 检测精度/% | |
| 单像素+尺度1 | 63 | 22.69 | 12.55 | 83.09 | 78 | 38.72 | 14.98 | 78.75 |
| 单像素+尺度1,2 | 61 | 18.67 | 11.95 | 85.13 | 81 | 38.88 | 11.88 | 79.77 |
| 单像素+尺度1,2,3 | 61 | 17.22 | 11.25 | 86.13 | 81 | 37.69 | 10.19 | 80.79 |
| 单像素+尺度1,2,3,4 | 58 | 14.31 | 10.94 | 87.57 | 83 | 37.98 | 7.48 | 81.55 |
| 单像素+尺度1,2,3,4,5 | 57 | 15.10 | 12.20 | 86.54 | 82 | 38.28 | 8.50 | 81.11 |
图 5、图 7分别显示了单像素变化检测结果、单一尺度中最好的检测结果、多尺度最好的检测结果与地表的变化参考影像。其中白色表示变化的区域,黑色表示没有变化的区域。可以发现,多尺度变化检测算法相对于单像素的检测算法来说能够很好地检测同质区域的变化情况;相对于单一尺度的变化检测算法来说,多尺度的变化检测算法能够保持更多小地物目标及边缘区域的变化。
对于城镇地区,本文算法能很好地检测出呈面状分布的建筑变化区域;对于农田、水域和道路区域,从检测精度来看(表 3),随着尺度的增加,农田区域的总体检测精度在升高,误检率有一定的降低(14.98%降低到7.48%),检测算法对呈区域状分布的水域、道路能很好地检测,对农田区域变成建筑用地也能很好地检验(图 7中右下角区域)。但是,农田区域的漏检率没有明显改变(37%—39%)),特别是农田区域变成荒地的区域(图 7中左上角区域)、农田中农作物本身的变化(图 7中左侧中部区域)不能很好地检测出变化情况。这是由于农田区域植被结构的差异导致在局部区域有较高的异质性,利用多尺度分割时,不能很好地提取有代表性的分割对象。另外,本文算法中只采用了全色波段的灰度数据用于变化检测,而在这个波段范围农田和荒地辐射上差异不大(变化前农田灰度均值128,变化后荒地的灰度均值135)。
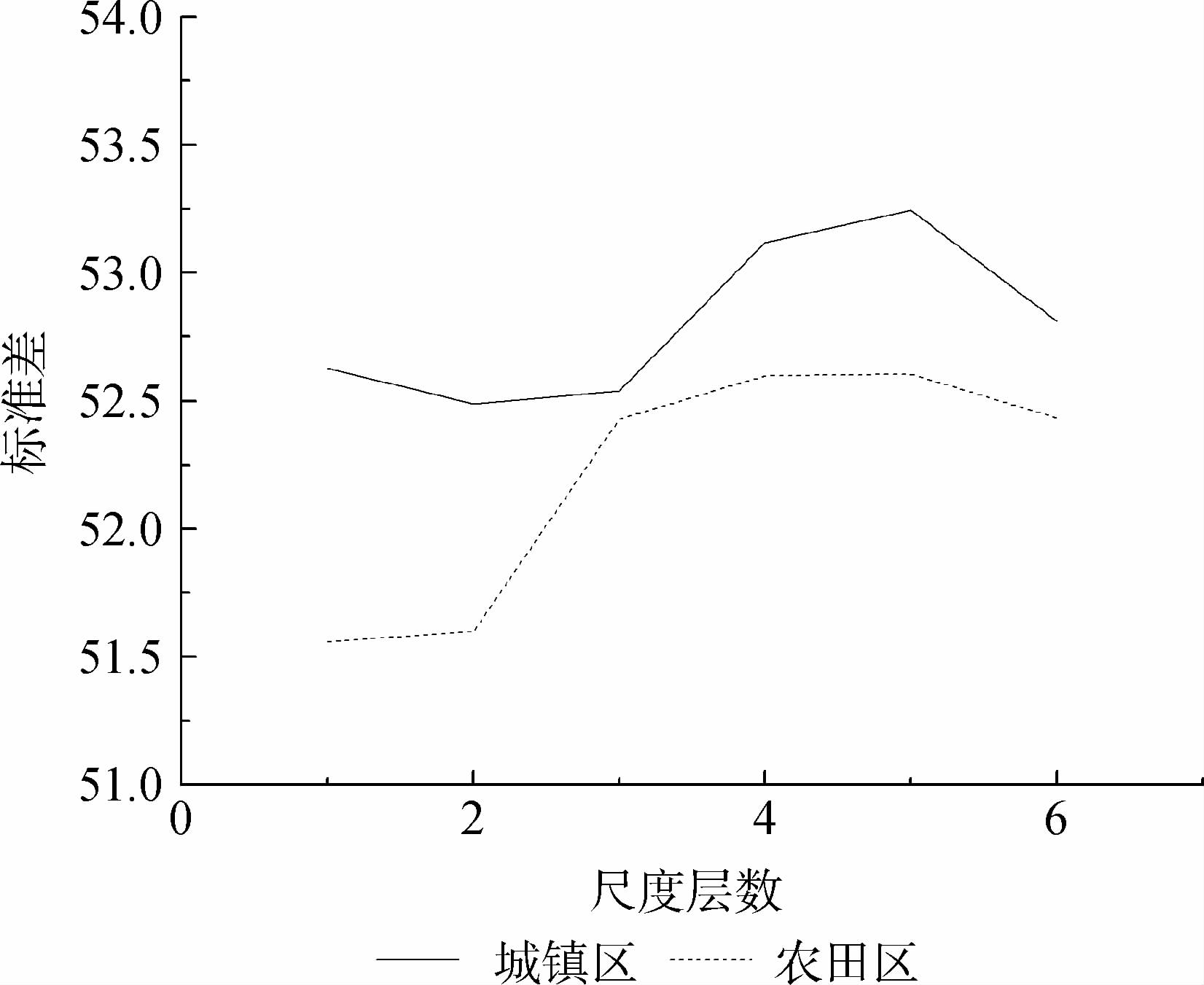
从表 3中也可以发现,尺度的层数对检测的结果也有一定的影响,并不是层数越多,检测精度越高。对本文中的实验数据发现,当有5层分割尺度时(单像素与尺度1—4组合),检测效果最好,当尺度增加时,检测的精度下降。本文利用了差异强度图的标准差随尺度的变化来选择最佳尺度。在差异强度图中,强度信息越离散,即标准差越大,越能突出变化和非变化类的灰度差异,当达到最大的标准差时对应的尺度即为最佳尺度。
图 8描述了城镇区、农田区在不同尺度层数上的差异强度图的标准差变化趋势,可以发现,当尺度层数为1即单像素尺度时,差异强度图的标准差较小,随着尺度层数的增大,标准差在逐渐上升,达到尺度层数为5时(单像素+尺度1—4),标准差最大,此时变化和无变化像素的离散程度最大,检测效果最好。
4 结论
本文针对高空间分辨率的遥感影像提出了一种基于多尺度分割的变化检测算法。采用Mean-Shift分割算法对图像进行多尺度分割,构建了不同尺度上的地理对象,以不同尺度上的地理对象灰度均值构建了变化检测的多尺度特征向量,采用变化矢量分析法获得最后的变化检测结果,并以城镇区和农田区域的QuickBird影像进行验证。本文得到以下结论:多尺度得面向对象的变化检测算法可以在一定程度上避免以单像素为单位的变化检测算法结果中出现孤立的点和离散不连通的区域,也能消除单一尺度的面相对象检测算法中对小目标区域及边缘区域不能很好检测的缺点。本文方法既可以顾及大面积同质区域变化,又可以反映小的地物目标及边缘部分的变化,能够很好地满足城镇、农田等不同环境背景下的变化检测需求,在国土资源监测中具有一定的应用价值。
参考文献
-
Bazi Y, Melgani F and Al-Sharari H D. 2010. Unsupervised change detection in multispectral remotely sensed imagery with level set methods. IEEE Transactions on Geoscience and Remote Sensing, 48(8):3178-3187[DOI:10.1109/TGRS.2010.2045506]
-
Blaschke T. 2010. Object based image analysis for remote sensing. ISPRS Journal of Photogrammetry and Remote Sensing, 65(1):2-16[DOI:10.1016/j.isprsjprs.2009.06.004]
-
Bovolo F. 2009. A multilevel parcel-based approach to change detection in very high resolution multitemporal images. IEEE Geoscience and Remote Sensing Letters, 6(1):33-37[DOI:10.1109/LGRS.2008.2007429]
-
Bovolo F and Bruzzone L. 2007. A theoretical framework for unsupervised change detection based on change vector analysis in the polar domain. IEEE Transactions on Geoscience and Remote Sensing, 45(1):218-236[DOI:10.1109/TGRS.2006.885408]
-
Bruzzone L and Carlin L. 2006. A multilevel context-based system for classification of very high spatial resolution images. IEEE Transactions on Geoscience and Remote sensing, 44(9):2587-2600[DOI:10.1109/TGRS.2006.875360]
-
Bruzzone L and Prieto D F. 2000. Automatic analysis of the difference image for unsupervised change detection. IEEE Transactions on Geoscience and Remote Sensing, 38(3):1171-1182[DOI:10.1109/36.843009]
-
Bruzzone L and Prieto D F. 2002. An adaptive semiparametric and context-based approach to unsupervised change detection in multitemporal remote-sensing images. IEEE Transactions on Image Process, 11(4):452-466[DOI:10.1109/TIP.2002.999678]
-
Carvalho Júnior O A, Guimarães R F, Gillespie A R, Silva N C and Gomes R A T. 2011. A new approach to change vector analysis using distance and similarity measures. Remote Sensing, 3(11):2473-2493[DOI:10.3390/rs3112473]
-
Celik T. 2009. Multiscale change detection in multitemporal satellite images. IEEE Geoscience and Remote Sensing Letters, 6(4):820-824[DOI:10.1109/LGRS.2009.2026188]
-
Chen G, Hay G J, Carvalho L M T and Wulder M A. 2012. Object-based change detection. International Journal of Remote Sensing, 33(14):4434-4457
-
Chen J Y, Mao Z H, Philpot B, Li J and Pan D L. 2013. Detecting changes in high-resolution satellite coastal imagery using an image object detection approach. International Journal of Remote Sensing, 34(7):2454-2469[DOI:10.1080/01431161.2012.743691]
-
Comaniciu D and Meer P. 2002. Mean shift:a robust approach toward feature space analysis. IEEE Transactions on Pattern Analysis and Machine Intelligence, 24(5):603-619[DOI:10.1109/34.1000236]
-
Daniel C Z and Victor H. 2012. Gradual land cover change detection based on multitemporal fraction images. Pattern Recognition, 45(8):2927-2937[DOI:10.1016/j.patcog.2012.02.004]
-
Dian Y Y. 2005. Research on Change Detection in Remote Sensing Imagery. Wuhan:Wuhan University (佃袁勇. 2005. 基于遥感影像的变化检测研究. 武汉:武汉大学)
-
Dian Y Y, Fang S H and Yao C H. 2014. The geographic object-based method for change detection with remote sensing imagery. Geomatics and Information Science of Wuhan University, 39(8):906-912 (佃袁勇, 方圣辉, 姚崇怀. 2014. 一种面向地理对象的遥感影像变化检测方法. 武汉大学学报(信息科学版), 39(8):906-912)
-
Dronova I, Gong P and Wang L. 2011. Object-based analysis and change detection of major wetland cover types and their classification uncertainty during the low water period at Poyang Lake, China. Remote Sensing of Environment, 115(12):3220-3236[DOI:10.1016/j.rse.2011.07.006]
-
Hazel G G. 2001. Object-level change detection in spectral imagery. IEEE Transactions on Geoscience and Remote Sensing, 39(3):553-561[DOI:10.1109/36.911113]
-
Hichri H, Bazi Y, Alajlan N and Malek S. 2013. Interactive segmentation for change detection in multispectral remote-sensing images. IEEE Geoscience and Remote Sensing Letters, 10(2):298-302[DOI:10.1109/LGRS.2012.2204953]
-
Inglada J and Mercier G. 2007. A new statistical similarity measure for change detection in multitemporal SAR images and its extension to multiscale change analysis. IEEE Transactions on Geoscience and Remote Sensing, 45(5):1432-1445[DOI:10.1109/TGRS.2007.893568]
-
Johnson R D and Kasischke E S. 1998. Change Vector Analysis:a technique for the multispectral monitoring of land cover and condition. International Journal of Remote Sensing, 19(3):411-426[DOI:10.1080/014311698216062]
-
Li D R. 2003. Change detection from remote sensing images. Geomatics and Information Science of Wuhan University, 28(special Issue):7-12 (李德仁. 2003. 利用遥感影像进行变化检测 武汉大学学报(信息科学版), 28(special Issue):7-12.)
-
Liu S C, Du P J and Chen S J. 2011. A novel change detection method of multi-resolution remotely sensed images based on the decision level fusion. Journal of Remote Sensing, 15(4):846-862 (柳思聪, 杜培军, 陈绍杰. 2011. 决策级融合的多分辨率遥感影像变化检测. 遥感学报, 15(4):846-862)[DOI:10.11834/jrs.20110098]
-
Liu S C, Bruzzone L, Bovolo F, Zsnetti M and Du P J. 2015. Sequential spectral change vector analysis for iteratively discovering and detecting multiple changes in hyperspectral images. IEEE Transactions on Geoscience and Remote Sensing, 53(8):4363-4378[DOI:10.1109/TGRS.2015.2396686]
-
Lizarazo I. 2012. Quantitative land cover change analysis using fuzzy segmentation. International Journal of Applied Earth Observation and Geoinformation, 15:16-27[DOI:10.1016/j.jag.2011.05.012]
-
Lu M, Mei Y, Zhao Y and Leng L. 2015. Change detection based on multi-scale geometric feature vector. Geomatics and Information Science of Wuhan University, 40(5):623-627 (陆苗, 梅洋, 赵勇, 冷亮. 2015. 利用多尺度几何特征向量的变化检测方法. 武汉大学学报(信息科学版), 40(5):623-627)
-
Lu P, Stumpf A, Kerle N and Casagli N. 2011. Object-oriented change detection for landslide rapid mapping. IEEE Geoscience and Remote Sensing Letters, 8(4):701-705[DOI:10.1109/LGRS.2010.2101045]
-
Marchesi S, Bovolo F and Bruzzone L. 2010. A context-sensitive technique robust to registration noise for change detection in VHR multispectral images. IEEE Transactions on Image processing, 19(7):1877-1889[DOI:10.1109/TIP.2010.2045070]
-
Ming D P, Ci T Y, Cai H Y, Li L X, Qiao C and Du J Y. 2012. Semivariogram-based spatial bandwidth selection for remote sensing image segmentation with mean-shift algorithm. IEEE Geoscience and Remote Sensing Letters, 9(5):813-817[DOI:10.1109/LGRS.2011.2182604]
-
Sun X X, Zhang J X, Yan Q and Gao J X. 2011. A summary on current techniques and prospects of remote sensing change detection. Remote Sensing Information, (1):119-123 (孙晓霞, 张继贤, 燕琴, 高井祥. 2011. 遥感影像变化检测方法综述及展望. 遥感信息, (1):119-123)
-
Wan Y C, Shen S H and Zhang J X. 2008. Change detection of multi-time remote sensing images based on statistics models. Geomatics and Information Science of Wuhan University, 33(7):669-672, 710 (万幼川, 申邵洪, 张景雄. 2008. 基于概率统计模型的遥感影像变化检测. 武汉大学学报(信息科学版), 33(7):669-672, 710)
-
Wang Y, Shu N and Gong Y. 2012. A study of land use change detection based on high resolution remote sensing images. Remote Sensing For Land and Resources, (1):43-47 (王琰, 舒宁, 龚龑. 2012. 高分辨率遥感影像土地利用变化检测方法研究. 国土资源遥感, (1):43-47)
Abstract
Change detection determines changes in multitemporal images, which are widely used in deforestation, land use, and urban expansion, among others. Nonetheless, traditional pixel-based change detection methods cause confusion when used on high-spatial images, and generat salt-and-pepper noises on the changed map because of the presence of heterogeneous objects at a pixel level. The useful spatial or contextual information regarding the values of proximate pixels is typically ignored in a pixel-based method; therefore, an object-based method is a new approach to solve these problems in high-spatial resolution images. This study proposes a multilevel object-based method to detect changes in such images. First, we utilize the mean-shift segmentation method to segment the image and consider the heterogeneity of ground objects. Geographic objects are acquired from the segment results at different levels through multilevel information. Then, we combine the gray data of each geographic object at different scale levels to build a feature vector. The change vector analysis method is used to construct an intensity difference map at the multitemporal phase. The change results are generated by applying the expectation maximization algorithm to automatically obtain the thresholds for changed and unchanged areas; moreover, the multiscale change detection algorithm is verified with QuickBird images of urban and rural areas. The pixel-based, single scale level object-based, and multiscale level object-based methods are also compared with one another based on these two datasets. Results show that the change detection accuracy of the object-based change detection method is higher than that of the pixel-based approach in both urban and rural areas. When the total scale level number considered in the change detection method is fixed, the multiscale, object-based method always performs better than the single level object-based method. The change detection accuracies in the urban and rural areas are 87.57% and 81.55%, respectively. Furthermore, the qualitative analysis findings related to the change-detection maps suggest that the proposed technique induces high fidelity in both homogenous and small or border regions. Thus, the proposed algorithm can satisfy the requirements of change detection in urban and rural areas, which benefits land and resource monitoring.
Key words
change detection; multilevel image segment; geographic object-based; high-resolution image; mean-shift; change vector analysis


