
Vehicle trajectory prediction model for unseen domain scenarios
-
摘要: 自动驾驶技术随着科技革新迎来蓬勃发展,轨迹预测已成为智能汽车软件系统不可或缺的关键组成部分。为了解决传统车辆轨迹预测模型中存在的泛化能力不足的问题,提出一种基于泛化终点预测和地图场景的车辆轨迹预测方法。该方法采用基于不变风险最小化的条件变分自编码器生成轨迹终点,并结合时序网络编码的地图场景特征,提升了模型预测未知域数据的准确率。在交互式道路场景数据集INTERACTION上的实验结果证明该模型具有良好的泛化性能。本方法与效果最好的方法REx相比1 、2 、3 s处的mADE值(越小越好)分别下降0%、36.59%、50.68%,在未知测试域的预测轨迹准确度得到显著提升。Abstract: With the rapid development of autonomous driving technology, trajectory prediction has become an essential component of smart car software systems. To address the limitations in the generalization of traditional vehicle trajectory prediction models, this study proposes a vehicle trajectory prediction method based on generalized endpoint prediction and vector maps. This method employs a conditional variational autoencoder based on invariant risk minimization to generate trajectory endpoints. The accuracy of the model in predicting unseen domains is improved by integrating map scene features encoded by a time-series network. Experiments were conducted using the interaction dataset, which includes interactive driving scenarios. Experimental results showed that, compared with the best-performing state-of-the-art (SOTA) method REx, the mADE values (where lower is better) decreased by 0%, 36.59%, and 50.68% at 1, 2, and 3 s, respectively. The accuracy of the predicted trajectories in the unseen test domain was significantly improved.
-
轨迹预测是无人驾驶系统中重要的功能组成,是车辆对附近物体运动作出反馈的前提。近年来,深度学习模型成为解决轨迹预测问题的一种有效方法[1]。但传统深度学习模型是一种基于数据独立同分布假设的机器学习方法,无法适应源域和目标域分布差异大的情况,导致模型性能下降[2]。车辆轨迹数据由于采集地区、采集方式、处理方法不同,数据域的分布偏差不可避免,故存在模型泛化能力不足问题。在实际使用场景中,模型泛化能力弱会带来极大的安全隐患。
不变风险最小化(invariant risk minimization, IRM)方法是近年来提出的针对泛化性问题的有效尝试[3],在图像分类等任务中表现良好。但是,将IRM方法直接用于解决回归性问题效果不佳,其原因包括:1)车辆轨迹是时序性数据,若IRM方法直接作用于编码器拟合的是所有轨迹点的分布,训练难度大,需要利用IRM方法特性设计新模块;2)车辆轨迹数据相比图像数据更稀疏,需要引入场景信息提升信息维度。为解决上述问题,本文提出一种面向未知域场景的车辆轨迹预测方法,引入基于IRM方法的终点预测模块(endpoint prediction module based on invariance risk minimization, EPI)并结合地图场景特征,通过在INTERACTION公开数据集上进行实验,验证算法有效性,获得泛化性能的提升。本文的主要贡献包含3个方面:
1) 提出一种用于提升车辆轨迹预测模型泛化能力的方法,以编码器−解码器框架为基础,结合基于不变性原理的终点预测模块和地图信息处理模块,提升模型预测未知数据域车辆轨迹的准确度。
2) 基于不变性原理的终点预测模块引入不变风险最小化损失函数,作用于学习目标终点分布的条件自编码器(conditional variational auto encoder, CVAE),捕获以域不变特征为条件的潜在分布,提升预测未知域车辆终点结果的准确率。
3) 提出一种提取地图上下文场景信息的方法,通过添加长短期记忆(long short-term memory, LSTM)网络编码器组成的矢量地图数据处理单元,捕捉车道的方向性,为预测的未来轨迹提供约束,并且采用车道中心线搜索和排序的方式,使轨迹预测模型能够更加有效利用地图场景信息。
1. 相关工作
车辆轨迹预测模型的泛化问题是一种多要素信息耦合的综合性问题。不仅需要建模车辆轨迹以及周边的环境信息,还应采用合适的域泛化方法提升模型泛化性。相关工作包括2个方面,即车辆轨迹及地图编码方法和域泛化方法。
1.1 车辆轨迹及地图编码方法
1.1.1 车辆轨迹预测方法
时序网络由于结构的特殊性,适合轨迹性数据的预测工作。时序网络可以作为提取历史轨迹特征的编码器,也可以作为输出层的解码器。近年来时序网络演化出多种结构:循环神经网络[4] (recurrent neural network, RNN)、LSTM网络[5]、门控循环单元[6](gated recurrent unit, GRU)。其中LSTM和GRU解决了RNN梯度容易消失或爆炸的问题[7]。基于深度学习的轨迹预测模型最初应用于行人轨迹预测[8]。Park等[9]首次利用LSTM编码器−解码器架构处理时序数据。但单一时序网络不能捕获多个相关序列之间的关系,因此社交池化机制被应用于时序网络[10]。Social-LSTM[11]引入社交池化层建模轨迹之间的交互,并共享相关序列特征。Deo等[12]提出的CS-LSTM在社交池化层的基础上使用卷积操作,捕获轨迹间的相对位置特征。社交池化层丰富了车辆轨迹数据,成为提取轨迹之间关系的途径。
图神经网络也是编码轨迹数据的一种结构[13],其主要思想是将环境中的每个对象都视为图的节点。每个场景可以看作一个不规则的图,每个图包含大小可变的无序节点[14]。Diehl等[15]首次将图神经网络使用在轨迹预测上,他们使用图卷积网络和图注意力网络分别进行基于车辆交互的轨迹预测。Mohamed等[16]提出Social-STGCNN将行人与周围物体的交互行为建模为图模型,并通过一个核函数将行人之间的社交互动嵌入邻接矩阵中。GRIP(graph-based interaction-aware trajectory prediction)[17]、GRIP++[18]使用无向图来表示车辆之间的交互特性,其中图的节点代表车辆,车辆的位置信息建模为图的节点特征,图的边代表车辆之间的交互性。Zhao等[19]利用图神经网络提出了一种称为TNT(target-driven trajectory)的目标驱动方法,该方法定义稀疏的候选目标点并选择到达目标的最佳轨迹。在TNT的基础上,DenseTNT[20]通过获取更稠密的候选目标,获得比TNT更好的结果。由于深度学习模型过拟合影响IRM的效果[21],参数量大的网络反而不利于IRM方法发挥效用[22]。
1.1.2 地图编码方法
场景上下文可以为网络预测提供先验知识。Ziegler 等[23]将高清地图渲染应用于轨迹预测,并通过与车辆关联的车道信息搜索地图拓扑,从而获得其沿车道的未来轨迹。Hong等[24]使用卷积网络提取场景上下文特征编码地图信息。然而,卷积网络的感受野有限,且地图编码需要人工干预。Gao等[25]直接从高清地图中学习有效的上下文表示,提出了一种基于分层图神经网络来建模车辆与车辆以及车辆与环境之间的交互特性的方法,即VectorNet。该方法用矢量表示各个道路组件的空间局部性,根据上下文恢复被随机掩盖的地图实体和车辆轨迹,增强对地图特征的捕捉。Zeng等[26]使用LaneRCNN模型编码历史轨迹和局部地图拓扑,并通过交互模块捕捉局部车道地图的交互。
图网络编码地图的方式注重车道间的拓扑关系,但是没有强调车道的方向性以及约束轨迹时存在的时序性。
1.2 域泛化方法
提升模型域泛化能力目前主要可以通过以下3种方式:数据操作、策略学习、表征学习[27]。
数据操作主要是指在模型训练前,为了缩小数据集之间的偏差对输入数据进行处理,一般为数据增强[28]和数据生成[29]。这种方法本质是通过完善输入数据的分布来提升模型的泛化性。
策略学习通过训练策略提升泛化能力,包括集成学习和元学习。Segu等[30]采用集成学习的思想,假设测试域中的任何样本都可以被视为多源域的集成样本,因此整体预测应通过在不同域上训练出的模型的组合来推断。元学习方法[31]将来自多个域的数据分为元训练数据和元测试数据,通过模拟域转移情况学习泛化性更好的数据表示方式。
表征学习在域泛化中是涉及到模型结构设计的一类方法,一部分的研究方法注重特征解耦,即将特征解耦为域共享和域独有2类。另一部分注重促进模型学习域不变的表示,核心思想是通过学习域不变表征缩小域之间偏差,从而提升未知域预测轨迹的准确度。域不变表征可以通过训练域不变的特征转换核获得[32],也可以利用对抗学习的思想,从特征处理器和域判别器对抗训练中获得[33]。
不变风险最小化也属于表征学习,其主要思想为:只有不变因果特征是预测目标应考虑的因素,并且在不同域中保持不变。可以利用域之间特征的差异性区别不变特征与变化的特征,通过学习不变特征的条件分布提高泛化性。Arjovsky等[3]提出IRM方法不寻求匹配所有域的表示分布,而是在特征空间强制最佳分类器在所有域中都相同。Krueger等[34]提出REx(risk extrapolation)方法通过最小化源域之间的外推风险来促使不变性特征的学习。Bayesian IRM[21]指出导致IRM方法在深度学习上效果不佳的原因是过拟合,提出了用贝叶斯后验分布拟合一个分类器来增强IRM作用效果。Sparse IRM[22]中提出给网络加上稀疏性约束,训练一个稀疏的网络来抑制过拟合。
对于不变风险最小化的探索一直应用在模拟数据集和图像分类问题上,所以在时序真实数据的泛化性问题中,需要设计合适的框架结构合理应用不变性原理。
2. 模型结构
本文提出一种应用于未知域的车辆轨迹预测模型(invariance principle and vector map based vehicle trajectory prediction model, IPVM),设计基于不变性原理的终点预测模块与地图信息处理模块解决车辆轨迹预测模型泛化能力不足的问题。
2.1 问题表述
假设n个不同场景下的车辆轨迹数据域
$ {\boldsymbol{D}} = \{ {{\boldsymbol{D}}_1},{{\boldsymbol{D}}_2}, \cdots ,{{\boldsymbol{D}}_n}\} $ , 单个数据域内的信息包括$ {{\boldsymbol{D}}_n} = \{ {{\boldsymbol{T}}^n},{{\boldsymbol{H}}^n},{{\boldsymbol{C}}^n}\} $ , 其中${{\boldsymbol{D}}_n}$ 中的智能体的未来轨迹$ {{\boldsymbol{T}}^n} = \{ {\boldsymbol{Y}}_{\text{1}}^n,{\boldsymbol{Y}}_{\text{2}}^n, \cdots ,{\boldsymbol{Y}}_m^n\} $ , 智能体的历史轨迹${{\boldsymbol{H}}_n} = \{ {\boldsymbol{X}}_1^n, {\boldsymbol{X}}_2^n, \cdots , {\boldsymbol{X}}_m^n\} $ ,其中 m表示智能体的个数。单条未来轨迹定义为$ {\boldsymbol{Y}}_m^n = \{ {\boldsymbol{y}}_{m,t + 1}^n,{\boldsymbol{y}}_{m,t + 2}^n, \cdots ,{\boldsymbol{y}}_{m,t + \alpha }^n\} $ ,$\alpha $ 表示未来轨迹的时间步长。单条历史轨迹定义为$ {\boldsymbol{X}}_m^n = \{ {\boldsymbol{x}}_{m,t - \beta + 1}^n, {\boldsymbol{x}}_{m,t - \beta + 2}^n, \cdots ,{\boldsymbol{x}}_{m,t}^n\} $ ,$\beta $ 表示历史轨迹的时间步长。数据域${{\boldsymbol{D}}_n}$ 的场景上下文信息为$ {{\boldsymbol{C}}^n} = \{ {\boldsymbol{c}}_1^n,{\boldsymbol{c}}_2^n, \cdots ,{\boldsymbol{c}}_\tau ^n\} $ ,其中$ {\boldsymbol{c}}_1^n $ 为${{\boldsymbol{D}}_n}$ 场景中的车道中心线,$\tau $ 为场景中车道中心线的个数。其中定义$ {\boldsymbol{c}}_\tau ^n $ 内坐标为$ {\boldsymbol{c}}_\tau ^n $ $ = \{ (a_1^n,b_1^n), (a_2^n,b_2^n), \cdots ,(a_r^n,b_r^n)\} $ ,r为车道中心线的节点数。方法目标是根据被预测车辆和周边车辆历史轨迹${\boldsymbol{X}}_m^n$ 以及场景上下文信息$ {{\boldsymbol{C}}^n} $ 预测未来轨迹的坐标${\boldsymbol{Y}}_m^n$ 。本文将轨迹预测拆分为2个子任务,首先预测终点的可能位置$ {\boldsymbol{y}}_{m,t + \alpha }^n $ ,接着根据终点位置预测其他轨迹点$ \left\{ {{\boldsymbol{y}}_{m,t + 1}^n,{\boldsymbol{y}}_{m,t + 2}^n, \cdots ,{\boldsymbol{y}}_{m,t + \alpha - 1}^n} \right\} $ 。2.2 基于不变性原理的终点预测模块
基于不变性原理的终点预测模块的主要结构是基于不变风险最小化原理的条件变分自编码器(CVAE),根据历史轨迹、场景上下文信息实现对终点
$ {{\boldsymbol{y}}_{t + \alpha }} $ 的分布$ {P_{{q}}}({{\boldsymbol{y}}_{t + \alpha }}{\boldsymbol{|}}{{\boldsymbol{H}}^1},{{\boldsymbol{H}}^2}, \cdots ,{{\boldsymbol{H}}^n},{{\boldsymbol{C}}^1},{{\boldsymbol{C}}^2}, \cdots ,{{\boldsymbol{C}}^n}) $ 的估计。具体实现方法是构建一个隐变量Z,假设后验分布$ {P_{{q}}}({\boldsymbol{Z|}}{{\boldsymbol{y}}_{t + \alpha }},{{\boldsymbol{H}}^1},{{\boldsymbol{H}}^2}, \cdots ,{{\boldsymbol{H}}^n},{{\boldsymbol{C}}^1},{{\boldsymbol{C}}^2}, \cdots ,{{\boldsymbol{C}}^n}) $ 符合正态分布,利用本模块拟合该分布的均值$\mu $ 和方差${\sigma ^2}$ ,使$ {\boldsymbol{Z}} \sim N{\text{(}}\mu {\text{,}}{\sigma ^2}{\text{)}} $ 接近$ N(0,1) $ 分布,在预测场景下利用对隐变量Z的采样生成终点位置分布。IRM风险项与CVAE联合构成基于不变性原理的终点预测模块。若将不变特征设为
$ {{\boldsymbol{F}}_{\mathrm{s}}} = \{ {\boldsymbol{H}}_{\mathrm{s}}^1,{\boldsymbol{H}}_{\mathrm{s}}^2, \cdots ,{\boldsymbol{H}}_{\mathrm{s}}^n,{\boldsymbol{C}}_{\mathrm{s}}^1,{\boldsymbol{C}}_{\mathrm{s}}^2, \cdots ,{\boldsymbol{C}}_{\mathrm{s}}^n\} $ ,变化的特征设为$ {{\boldsymbol{F}}_{\mathrm{r}}} = \{ {\boldsymbol{H}}_{\mathrm{r}}^1,{\boldsymbol{H}}_{\mathrm{r}}^2, \cdots ,{\boldsymbol{H}}_{\mathrm{r}}^n,{\boldsymbol{C}}_{\mathrm{r}}^1,{\boldsymbol{C}}_{\mathrm{r}}^2, \cdots ,{\boldsymbol{C}}_{\mathrm{r}}^n\} $ ,EPI模块的编码器以KL(kullback-leibler)散度为损失函数,使拟合的$ {Q_q}({\boldsymbol{Z|}}{{\boldsymbol{y}}_{t + \alpha }},{{\boldsymbol{F}}_{\text{s}}},{{\boldsymbol{F}}_{\text{r}}}) $ 分布接近$ {P_{{q}}}({\boldsymbol{Z|}}{{\boldsymbol{y}}_{t + \alpha }},{{\boldsymbol{F}}_{\text{s}}},{{\boldsymbol{F}}_{\text{r}}}) $ 的分布,解码器学习$ {P_\theta }({{\boldsymbol{y}}_{t + a}}{\boldsymbol{|Z}},{{\boldsymbol{F}}_{\text{s}}},{{\boldsymbol{F}}_{\text{r}}}) $ 的分布。本文加入的IRM惩罚项$L_{{\text{irm}}}^e$ 公式为$$ L_{{\text{irm}}}^e = ||{\nabla _{w|w = 1.0}}{R^e}(w \cdot \phi )|{|^2} $$ (1) 式中:
$w$ 为一个线性回归器,$\phi $ 为基于不变性原理的终点预测模块,${R^{{e}}}$ 是环境e下终点预测值与真值的偏差。IRM惩罚项促使终点预测模块最终学习到的$ {Q_{{q}}}({\boldsymbol{Z|}}{{\boldsymbol{y}}_{t + \alpha }}{\text{,}}{{\boldsymbol{F}}_{\text{s}}}{\text{,}}{{\boldsymbol{F}}_{\text{r}}}) $ 分布会削弱与$ {{\boldsymbol{F}}_{\text{r}}} $ 的相关性,拟合仅以$ {{\boldsymbol{F}}_{\text{s}}} $ 和$ {{\boldsymbol{y}}_{{{{\mathrm{t}} + \alpha }}}} $ 为条件的隐变量Z的分布,使预测结果不受变化的特征影响。IPVM整体结构如图1所示,其中绿色框代表传输过程中的数据张量,蓝色框代表模型编码解码模块。模型在编码器−解码器结构的基础上添加了基于不变性原理的终点预测模块,在信息输入维度上增加地图信息和邻近车辆信息,使用本文提出的地图信息处理模块对地图数据进行处理,使用卷积社会池化模块提取车辆之间的交互信息,为最终生成轨迹提供强约束,增强模型的泛化能力。
 图 1 IPVM 整体结构Fig. 1 Overall structure of IPVM
图 1 IPVM 整体结构Fig. 1 Overall structure of IPVM 下载:
全尺寸图片
下载:
全尺寸图片
首先数据集被整理成车辆终点、历史轨迹、周边地图信息、邻近车辆轨迹4个部分。其中地图数据输入到地图信息处理模块中整合筛选,再与历史轨迹、邻近车辆轨迹3个部分共同经过LSTM模块编码,利用LSTM长短期记忆的特性提取时序性特征,生成历史轨迹张量
${{\boldsymbol{V}}_{\text{t}}}$ 、地图张量${{\boldsymbol{V}}_{\text{m}}}$ 和邻近车辆轨迹张量${{\boldsymbol{V}}_{\text{n}}}$ 。泛化终点预测模块需要输入地图信息、车辆终点信息以及历史轨迹信息。所以历史轨迹张量${{\boldsymbol{V}}_{\text{t}}}$ 、地图张量${{\boldsymbol{V}}_{\text{m}}}$ 、车辆终点张量${{\boldsymbol{V}}_{\text{d}}}$ 先经过各自的编码器模块${{{\mathrm{E}}} _{\mathrm{t}}}$ 、${{{\mathrm{E}}} _{\mathrm{m}}}$ 、${{{\mathrm{E}}} _{\mathrm{d}}}$ 生成张量$ {\boldsymbol{V}}_{\text{t}}' $ 、$ {\boldsymbol{V}}_{\mathrm{m}}' $ 、$ {\boldsymbol{V}}_{\text{d}}' $ ,整合成相应维度后,再将$ {\boldsymbol{V}}_{\text{t}}' $ 、$ {\boldsymbol{V}}_{\mathrm{m}}' $ 、$ {\boldsymbol{V}}_{\text{d}}' $ 3个张量级联作为泛化终点预测模块的输入。在模块内部,输入经过编码器${{{\mathrm{E}}} _{{\mathrm{CAVE}}}}$ 拟合隐变量$ {\boldsymbol{Z}} \sim N{\text{(}}\mu { {,}}{\sigma ^2}{\text{)}} $ 分布的均值$\mu $ 和方差${\sigma ^2}$ ,隐变量Z与历史轨迹张量${{\boldsymbol{V}}_{\text{t}}}$ 级联输入到解码器${{{\mathrm{D}}} _{{\mathrm{CAVE}}}}$ 中生成轨迹终点$\widetilde {{{\boldsymbol{V}}_{\text{d}}}}$ ,$\widetilde {{{\boldsymbol{V}}_{\text{d}}}}$ 张量组成最终预测结果的轨迹终点$ \hat {\boldsymbol{y}}_{m,t + \alpha }^n $ 。最后终点张量$\widetilde {{{\boldsymbol{V}}_{\text{d}}}}$ 经过编码器$\widetilde {{{\text{E}}_{\text{d}}}}$ 编码,$\widetilde {{{\text{E}}_{\text{d}}}}$ 的输出与其他3部分历史轨迹张量${{\boldsymbol{V}}_{\text{t}}}$ 、地图张量${{\boldsymbol{V}}_{\text{m}}}$ 和邻近车辆轨迹张量${{\boldsymbol{V}}_{\text{n}}}$ 级联后输入到LSTM解码模块,生成除终点外的其余轨迹。训练过程中为使IRM惩罚项发挥作用,需要至少2个不同域的数据,交替输入模型如图1所示,并分别计算出对应数据域的IRM惩罚项,最后对惩罚项求平均后反向传播。测试过程中由于车辆终点不再是已知信息,所以跳过编码器生成和的步骤,直接对隐变量Z进行采样,与历史轨迹张量
${{\boldsymbol{V}}_{\text{t}}}$ 级联输入到解码器${{{\mathrm{D}}} _{{\mathrm{CVAE}}}}$ 中生成未来终点$\widetilde {{{\boldsymbol{V}}_{\text{d}}}}$ 。2.3 地图信息处理模块
车辆的未来轨迹与道路结构密切相关[35]。本文处理场景上下文中的地图信息采用矢量地图抽取邻近道路中心线维度的信息。这种处理有利于编码器捕捉车道方向。在处理信息过程中由于矢量地图会出现左右车道线方向不一致的情况,所以加入车道方向修正步骤;最后,按距离排序筛选出离车辆历史轨迹近的中心线。本文认为行驶方向的车道中心线在约束车辆轨迹时也具备时序特征,所以将地图信息最终输入到LSTM编码器中提取时序性特征。
地图信息处理模块由4个步骤组成,如图2所示。步骤1是提取地图信息。大部分矢量地图是以树的结构在文件中存储,存储的内容包括各组件属性信息以及与其余组件的关系。节点组件保存各节点的经纬度坐标。道路组件保存了组成道路车道线的节点以及道路属性,如车速、类型、颜色等等。关系(relation)组件利用道路组件描述地图中成员之间的联系,例如2个道路组件即可组成机动车行驶车道。图2左下方所示为矢量图可视化的效果。
 图 2 地图信息处理模块流程Fig. 2 Map information processing flow chart下载:
全尺寸图片
图 2 地图信息处理模块流程Fig. 2 Map information processing flow chart下载:
全尺寸图片
步骤2是抽取道路中心线。首先需要将地图的组件均实例化,统一节点坐标与车辆轨迹坐标的坐标系。由于矢量地图会出现车道线方向不一致的情况,扰乱后续计算道路中心线的步骤,需要判断两车道线方向是否一致,依情况将左车道线反向。另外车道的左右节点个数差异也会导致中心线节点计算错误。针对这个问题,本模块将节点个数少的车道根据个数多的车道补充新节点。一次样条插值计算新节点的坐标的公式为
$$ f[{k_u},{k_{u + 1}}] = \frac{{{j_{u + 1}} - {j_u}}}{{{k_{u + 1}} - {k_u}}} $$ $$ {L_{1,u}}(k) = {j_u} + f[{k_u},{k_{u + 1}}](k - {k_u}) $$ $$ \widetilde {{L_1}}(k) = \left\{ {\begin{array}{*{20}{c}} {{L_{1,1}}(k),k \in [{k_1},{k_2})} \\ \begin{gathered} {L_{1,2}}(k),k \in [{k_2},{k_3}) \\ \vdots \\ \end{gathered} \\ {{L_{1,u - 1}}(k),k \in [{k_{u - 1}},{k_u})} \end{array}} \right. $$ 式中:
$ ({k_u},{j_u}) $ 为矢量地图中的道路组件,取中线后可得车道$ {\boldsymbol{c}}_\tau ^n $ 中心线坐标$ ({a_u},{b_u}) $ 。最后根据机动车道的坐标范围,构建道路范围多边形以供道路搜索模块使用,道路多边形构建方式的公式为$$ {\boldsymbol{S}}_\tau ^n = \{ \min ({j_u}),\min ({k_u}),\max ({j_u}),\max ({k_u})\} $$ 步骤3是邻近道路搜索。先根据当前车辆历史轨迹的端点,以及设置的搜索范围超参数,确定搜索道路的坐标范围。再依据搜索范围遍历道路范围多边形
$ {\boldsymbol{S}}_\tau ^n $ ,将有范围重合的道路中心线以历史轨迹端点为基准实现坐标归一化。最后将归一化的中心线加入到集合中。步骤4是地图道路排序。遍历步骤3中归一化后的中心线集合。中心线按照地图相关距离
$d$ 从小到大排序,地图相关距离$d$ 定义为中心线起始点和末尾点分别于历史轨迹端点的欧氏距离,由于坐标事先归一化,历史轨迹端点即为原点$$ d = \sqrt {a_1^2 + b_1^2} + \sqrt {a_u^2 + b_u^2} $$ 为了防止中心线长度不一致形成的末尾补零影响LSTM编码的效果,采取对齐中心线节点个数的措施。最后将相邻两点求取平均值,减少部分节点异常变化的影响。
2.4 社会池化模块
场景中其他动态交通参与者是影响被预测车辆未来轨迹的重要因素[36]。本模型的社会池化模块旨在提取被预测车辆周边邻近车辆轨迹的交互特征。使用与CS-LSTM[12]类似的卷积池化结构,如图3所示,池化模块通过设置空间网格结构组织社会池化张量
$ {{\boldsymbol{V}}_{\mathrm{n}}} $ 。依照邻近车辆所在的网格位置,使用历史轨迹的编码填充网格。本模型将社会池化张量经过2层卷积层和1层池化层。卷积模块有利于捕捉邻近车辆之间的位置关系,最大池化层可以增加局部平移不变性[12]。为了更契合复杂交通环境交互特征的情况,本模型将原本3×13的空间网格扩张为13×13,扩大针对临近车辆的感受野。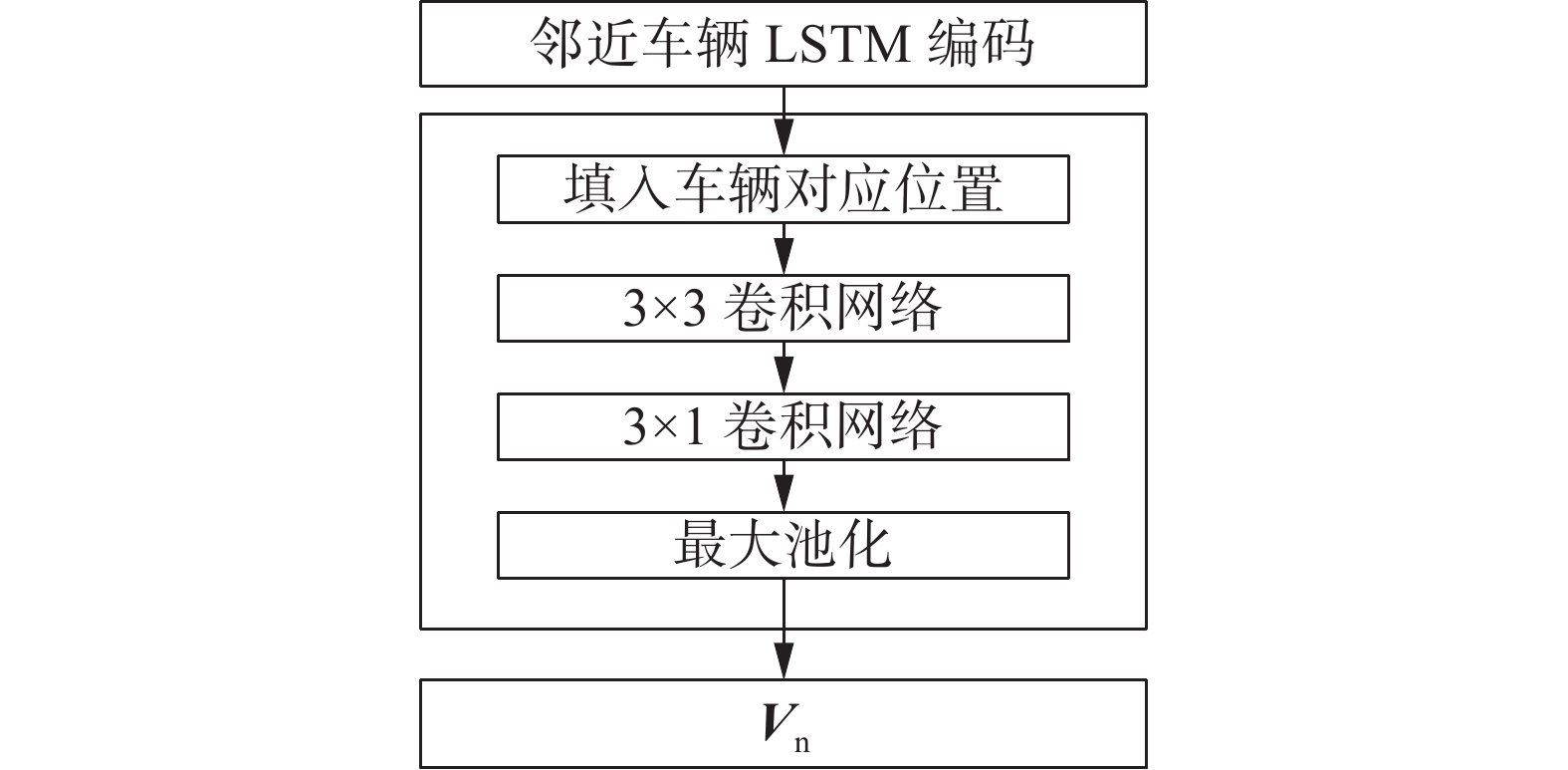 图 3 社会池化模块框架Fig. 3 Structure of social pooling module下载:
全尺寸图片
图 3 社会池化模块框架Fig. 3 Structure of social pooling module下载:
全尺寸图片
2.5 损失函数
本模型的损失函数由4个部分组成。基于不变性原理的终点预测模块包含3个损失项:预测重点目标的终点偏差损失
$L_{{\text{dest}}}^e$ 、KL散度损失$ L_{{\text{KL}}}^e $ 以及不变因果最小化损失$L_{{\text{irm}}}^e$ 。$L_{{\text{irm}}}^e$ 如式(1)所示。重构损失为终点预测模块矫正预测终点的准确度,计算终点预测值$ \hat y_{m,t + \alpha }^n $ 与真值$ y_{m,t + \alpha }^n $ 的${l_2}$ 范数。KL散度损失用于约束隐变量Z的分布$ N{\text{(}}\mu {\text{,}}{\sigma ^2}{\text{)}} $ 更接近$ N{\text{(}}0{\text{,1)}} $ 分布。IRM损失促进终点预测模块削弱与变化的非因果特征的相关性。$$ L_{{\text{dest}}}^e = \frac{1}{m}\sum\limits_{i \in m} {||{\boldsymbol{y}}_{i,t + \alpha }^e{ - }\hat {\boldsymbol{y}}_{i,t + \alpha }^e|{|_2}} ,e \in n $$ $$ \begin{gathered} L_{{\text{KL}}}^e = {\text{KL}}(N(\mu ,{\sigma ^2})||N(0,1)) = \\ \frac{1}{2}( - \ln ({\sigma ^2}) + {\mu ^2} + {\sigma ^2} - 1),e \in n \\ \end{gathered} $$ 剩余轨迹点生成引出第4个损失项轨迹偏差损失
$ L_{{\text{rmse}}}^e $ 。轨迹偏差损失$ L_{{\text{rmse}}}^e $ 用于衡量预测轨迹的准确性,校正轨迹预测结果,计算轨迹预测值与真实值的${l_2}$ 范数,其计算公式为$$ \begin{array}{c} L_{{\text{rmse}}}^e = \dfrac{1}{m}\displaystyle\sum\limits_{i \in m} {||({\boldsymbol{y}}_{i,t + 1}^e,{\boldsymbol{y}}_{i,t + 2}^e, \cdots ,{\boldsymbol{y}}_{i,t + \alpha - 1}^e)} - \\ (\hat {\boldsymbol{y}}_{i,t + 1}^e,\hat {\boldsymbol{y}}_{i,t + 2}^e, \cdots ,\hat {\boldsymbol{y}}_{i,t + \alpha - 1}^e)|{|_2},e \in n \end{array} $$ 由于训练过程中需要分别计算各个数据域的损失,求平均后共同反向传播,所以总损失函数L的计算公式为
$$ L = \frac{1}{n}\sum\limits_{e \in n} {(\gamma L_{{\text{dest}}}^e + \delta L_{{\text{KL}}}^e + \eta L_{{\text{rmse}}}^e)} + \lambda {L_{{\text{irm}}}} $$ 式中相关超参数本文设置为
$\gamma = \delta = \eta = 1$ 。$\lambda $ 为训练过程中调整IRM损失作用强弱的超参数。3. 实验分析
3.1 数据集与评价指标
本模型的实验部分使用公开数据集INTERACTION[37],其包含4种不同道路场景,即环岛、无信号交叉路口、有信号交叉路口以及会车与变道,总共11个地图场景。数据采样频率为10 Hz,轨迹长度基本大于5 s。此数据集是具有高清矢量地图的交互式驾驶场景中的轨迹数据。本文实验在环岛、交叉路口2种复杂场景中进行2组实验,定义每个地图场景为1个数据域,选取1个作为测试集,其余作为训练集,测试域的选择根据轨迹数据量决定。测试集数据在训练过程中对模型不可见。因此环岛场景中使用FT地图数据和EPR地图数据训练的模型预测OF地图数据,交叉路口场景中使用MA地图数据和GL地图数据训练的模型预测EP地图数据。针对每个数据域,本文参考文献[19]将轨迹分割为5 s的片段,包括2 s的历史轨迹和3 s的未来轨迹。车辆轨迹原始采样频率为10 Hz,本文为平滑真实轨迹并降低模型参数量,将轨迹下采样,下采样系数为2,即历史轨迹步长
$\beta $ =10,未来轨迹步长$\alpha $ =15。实验评价指标使用最小平均位移误差(minimum average displacement error, mADE)衡量车辆轨迹模型的泛化能力。mADE定义为生成的k个终点与真值插值最小的那条预测轨迹与真值轨迹点的平均
${l_2}$ 范数公式为$$ L_{\text{mADE}} = \min {\left\{ \frac{{\displaystyle\sum\limits_{i \in m} {\displaystyle\sum\limits_{j = 1}^\alpha {||{\boldsymbol{y}}_{m,t + j}^n - {\boldsymbol{\hat y}}_{m,t + j}^n|{|_2}} } }}{{m \times \alpha }}\right\} _k} $$ (2) 在实验网络参数的设置方面,学习率设置为0.001,优化器使用Adam优化器,所有实验统一训练25个回合,IRM损失项的系数 λ 取3 100。
3.2 定量结果与分析
本文首先针对IPVM对不变风险最小化方法、终点预测模块以及地图信息处理模块3个部分进行消融研究。接着将IPVM与域泛化的方法进行横向比较。实验指标为根据式(2)计算的mADE值。
3.2.1 消融实验
为验证IPVM各模块的性能,采用消融实验评估IRM损失、终点预测模块以及地图处理模块的作用。
2组实验的结果如表1~2所示,表中给出模型在预测时间1~3 s的mADE值,评价指标以m为单位。“√”代表使用该模块,“×”代表不使用该模块。实验结果表明各模块对模型预测车辆的准确度的提升均有积极贡献。
表 1 FT+EPR预测OF的消融实验Table 1 Prediction of ablation experiment of OF by FT+EPRm IRM CVAE MAP 1 s 2 s 3 s × √ √ 0.23 0.56 1.16 √ × √ 0.23 0.62 1.39 √ √ × 0.28 0.53 0.86 √ √ √ 0.18 0.41 0.72 表 2 MA+GL预测EP的消融实验Table 2 Prediction of ablation experiment of EP by MA+GLm IRM CVAE MAP 1 s 2 s 3 s × √ √ 0.18 0.32 0.54 √ × √ 0.16 0.38 0.8 √ √ × 0.11 0.23 0.38 √ √ √ 0.12 0.21 0.34 IRM损失有效性 引入IRM框架有助于测试集上1、2、3 s的预测准确度提升。IRM框架的使用促使模型内的编码器学习不变因果特征的分布,有助于模型泛化能力的提升。
终点预测模块有效性 引入终点预测模块对测试结果提升幅度最大。终点预测的机制模拟被预测车辆决策行驶方向的过程,并且防止预测误差随时间积累的问题。
地图信息模块有效性 引入地图信息处理模块的提升最小。地图信息的加入目的在于约束未来车辆轨迹,使车辆不仅考虑邻近车辆交互,还考虑场景地图的走势。但对地图处理过程中无法避免尖锐拐点、采样点疏密不一等问题,一定程度影响地图模块的最终效果。
3.2.2 定量结果分析
本节选择以下域泛化方法作为对比方法:1) ERM[38]:在编码器−解码器架构上,应用传统平均风险最小化ERM的方法;2) DANN[39]:使用的对抗学习的方法促进特征提取器的域不变性,特征提取器选择CS-LSTM网络;3) MMD[33]:使用最大均值差异原理促使不同域特征提取器的分布接近,特征提取器同样选择CS-LSTM网络;4) IRM[3]:IRM方法作用于整个骨干网络而不仅使用在终点预测模块中;5) REx[34]:以最小化源域之间的外推风险的方式促进不变因果特征分布的学习;6) IPVM:本文提出的模型结构,包括泛化终点预测模块与地图信息处理模块。上述6种方法在数据集上mADE的实验结果如表3~4所示,评价指标以m为单位。
表 3 FT+EPR预测OF的mADE实验结果Table 3 Prediction of mADE performance of OF by FT+EPRm 时间/s ERM MMD DANN IRM REx IPVM 1 0.32 0.15 0.40 0.22 0.18 0.18 2 0.73 0.55 0.84 0.58 0.67 0.41 3 1.51 1.31 1.71 1.30 1.46 0.72 表 4 MA+GL预测EP的mADE实验结果Table 4 Prediction of mADE performance of EP by MA+GLm 时间/s ERM MMD DANN IRM REx IPVM 1 0.19 0.13 0.24 0.24 0.12 0.12 2 0.39 0.32 0.56 0.45 0.32 0.21 3 0.78 0.70 1.16 0.85 0.73 0.36 根据表3~4的结果,首先MMD和REx 2种泛化方法在2组实验中的效果均比ERM方法优秀。而 IRM方法的表现并不稳定,说明IRM方法直接作用于深度学习网络存在局限性。DANN方法的结果最差,说明对抗学习在车辆轨迹预测问题上相与其余对比模型相比没有更好表现。分析原因可知车辆轨迹的域标签特征并不明确,导致域辨别器无法促使特征提取器生成域不变分布。IPVM模型的实验结果明显优于其余对比基线,与效果最好的方法REx相比1、2、3 s处的mADE值分别下降0%、36.59%、50.68%,虽然相比REx方法IPVM在1 s处没有提升,但其在2、3 s处提升效果明显。实验结果证明本文提出的基于不变性原理的终点预测模块与地图信息处理模块可以带来优化效果。本方法与IRM作用于整体网络相比,需要学习的分布从未来轨迹所有点的分布简化为轨迹终点分布,训练的难度减小有助于IRM方法产生效用。另外模型通过联系场景信息丰富轨迹数据,为预测轨迹提供有效约束也有助于泛化性的提升。
3.2.3 定性结果分析
本文提出的模型旨在提升车辆轨迹预测模型的域泛化性,如图4所示为OF和EP 2个测试集的车辆轨迹预测结果,其中黑色方框为车辆当前位置,黑色轨迹为车辆真实轨迹,绿色轨迹为不考虑泛化性的ERM模型的预测结果,蓝色轨迹为本文模型的预测结果。从图4可以看出IPVM的预测结果明显优于ERM,说明本文采取的措施有助于模型泛化性的提升。虽然ERM模型预测直线行驶的效果和IPVM相差不多,但在交叉路口和环形路口等复杂场景中,ERM的效果会偏离航线。从图4(b)、(d)中可以看出ERM模型的预测结果已经延伸至不可行驶区域,而IPVM模型由于加入了场景地图信息约束轨迹避开场景边界;从图4 (a)、(c)可以发现由于使用LSTM编码地图信息,考虑车道的方向性,避免了轨迹如ERM结果驶向逆行的车道。但是通过图4(c)仍可以发现,2种模型均无法捕捉车辆减速的情况,预测轨迹均超过车辆停止线,所以模型捕捉车辆减速停车信息方面仍然存在不足。
 图 4 测试集车辆轨迹可视化Fig. 4 Visualization of vehicle trajectory in test set下载:
全尺寸图片
图 4 测试集车辆轨迹可视化Fig. 4 Visualization of vehicle trajectory in test set下载:
全尺寸图片
4. 结束语
本文提出一种加入基于不变性原理的终点预测模块和地图信息的车辆轨迹预测框架,旨在解决车辆轨迹预测模型域泛化性差的问题。基于不变性原理的终点预测模块在传统CVAE模块上添加IRM损失项,促使CVAE学习的条件分布增强与不变特征的相关性,地图信息处理模块采用与传统方式不同的LSTM编码器处理车道中心线的方法,提升模型捕捉场景信息的能力。根据在INTERACTION数据集上的实验结果,本文提出的IPVM模型相比其他基线模型提高了未来轨迹预测的准确度。未来工作将尝试结合现有模型解决不变因果特征本身存在的分布偏差问题,进一步提升模型域泛化能力。
-
图 1 IPVM 整体结构
Fig. 1 Overall structure of IPVM
下载:
全尺寸图片
图 2 地图信息处理模块流程
Fig. 2 Map information processing flow chart
下载:
全尺寸图片
图 3 社会池化模块框架
Fig. 3 Structure of social pooling module
下载:
全尺寸图片
图 4 测试集车辆轨迹可视化
Fig. 4 Visualization of vehicle trajectory in test set
下载:
全尺寸图片
表 1 FT+EPR预测OF的消融实验
Table 1 Prediction of ablation experiment of OF by FT+EPR
m IRM CVAE MAP 1 s 2 s 3 s × √ √ 0.23 0.56 1.16 √ × √ 0.23 0.62 1.39 √ √ × 0.28 0.53 0.86 √ √ √ 0.18 0.41 0.72 表 2 MA+GL预测EP的消融实验
Table 2 Prediction of ablation experiment of EP by MA+GL
m IRM CVAE MAP 1 s 2 s 3 s × √ √ 0.18 0.32 0.54 √ × √ 0.16 0.38 0.8 √ √ × 0.11 0.23 0.38 √ √ √ 0.12 0.21 0.34 表 3 FT+EPR预测OF的mADE实验结果
Table 3 Prediction of mADE performance of OF by FT+EPR
m 时间/s ERM MMD DANN IRM REx IPVM 1 0.32 0.15 0.40 0.22 0.18 0.18 2 0.73 0.55 0.84 0.58 0.67 0.41 3 1.51 1.31 1.71 1.30 1.46 0.72 表 4 MA+GL预测EP的mADE实验结果
Table 4 Prediction of mADE performance of EP by MA+GL
m 时间/s ERM MMD DANN IRM REx IPVM 1 0.19 0.13 0.24 0.24 0.12 0.12 2 0.39 0.32 0.56 0.45 0.32 0.21 3 0.78 0.70 1.16 0.85 0.73 0.36 -
[1] HUANG Yanjun, DU Jiatong, YANG Ziru, et al. A survey on trajectory-prediction methods for autonomous driving[J]. IEEE transactions on intelligent vehicles, 2022, 7(3): 652−674. doi: 10.1109/TIV.2022.3167103 [2] 王翎, 孙涵. 基于域适应的多场景车辆检测[J]. 计算机技术与发展, 2019, 29(12): 158−161, 166. doi: 10.3969/j.issn.1673-629X.2019.12.028 WANG Ling, SUN Han. Vehicle detection in different scenes based on domain adaptation[J]. Computer technology and development, 2019, 29(12): 158−161, 166. doi: 10.3969/j.issn.1673-629X.2019.12.028 [3] ARJOVSKY M, BOTTOU L, GULRAJANI I, et al. Invariant risk minimization[EB/OL]. (2019−07−05) [2023−06−26]. https://arxiv.org/abs/1907.02893. [4] ELMAN J L. Finding structure in time[J]. Cognitive science, 1990, 14(2): 179−211. doi: 10.1207/s15516709cog1402_1 [5] HOCHREITER S, SCHMIDHUBER J. Long short-term memory[J]. Neural computation, 1997, 9(8): 1735−1780. doi: 10.1162/neco.1997.9.8.1735 [6] CHO K, VAN MERRIENBOER B, GULCEHRE C, et al. Learning phrase representations using RNN encoder-decoder for statistical machine translation[C]//Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing. Doha: ACL, 2014: 1724–1734. [7] 柴进. 基于聚类和LSTM算法的车辆轨迹预测模型研究[D]. 北京: 北京交通大学, 2020. CHAI Jin. On vehicle trajectory prediction model based on combined clustering and LSTM algorithm[D]. Beijing: Beijing Jiaotong University, 2020. [8] 孔玮, 刘云, 李辉, 等. 基于深度学习的行人轨迹预测方法综述[J]. 控制与决策, 2021, 36(12): 2841−2850. KONG Wei, LIU Yun, LI Hui, et al. Survey of pedestrian trajectory prediction methods based on deep learning[J]. Control and decision, 2021, 36(12): 2841−2850. [9] PARK S H, KIM B, KANG C M, et al. Sequence-to-sequence prediction of vehicle trajectory via LSTM encoder-decoder architecture[C]//2018 IEEE Intelligent Vehicles Symposium. Changshu: IEEE, 2018: 1672−1678. [10] 赵靖文, 李煊鹏, 张为公. 车辆多目标交互行为建模的轨迹预测方法[J]. 智能系统学报, 2023, 18(3): 480−488. doi: 10.11992/tis.202201022 ZHAO Jingwen, LI Xuanpeng, ZHANG Weigong. Vehicle trajectory prediction method based on modeling of multi-agent interaction behavior[J]. CAAI transactions on intelligent systems, 2023, 18(3): 480−488. doi: 10.11992/tis.202201022 [11] ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 961−971. [12] DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Salt Lake City: IEEE, 2018: 1468−1476. [13] 曾伟良, 陈漪皓, 姚若愚, 等. 时空图注意力网络在交叉口车辆轨迹预测的应用[J]. 计算机科学, 2021, 48(S1): 334−341. doi: 10.11896/jsjkx.200800066 ZENG Weiliang, CHEN Yihao, YAO Ruoyu, et al. Application of spatial-temporal graph attention networks in trajectory prediction for vehicles at intersections[J]. Computer science, 2021, 48(S1): 334−341. doi: 10.11896/jsjkx.200800066 [14] 赵靖文. 基于改进Transformer模型的车辆轨迹预测研究[D]. 南京: 东南大学, 2022. ZHAO Jingwen. Research on vehicle trajectory prediction based on the improved transformer model. Nanjing: Southeast University, 2022. [15] DIEHL F, BRUNNER T, LE M T, et al. Graph neural networks for modelling traffic participant interaction[C]//2019 IEEE Intelligent Vehicles Symposium. Paris: IEEE, 2019: 695−701. [16] MOHAMED A, QIAN Kun, ELHOSEINY M, et al. Social-STGCNN: a social spatio-temporal graph convolutional neural network for human trajectory prediction[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2020: 14412−14420. [17] LI Xin, YING Xiaowen, CHUAH M C. GRIP: graph-based interaction-aware trajectory prediction[C]// 2019 IEEE Intelligent Transportation Systems Conference. Auckland: IEEE, 2019: 3960−3966. [18] LI Xin, YING Xiaowen, CHUAH M C. GRIP++: enhanced graph-based interaction-aware trajectory prediction for autonomous driving[EB/OL]. (2019−07−17) [2023−06−26]. https://arxiv.org/abs/1907.07792. [19] ZHAO Hang, GAO Jiyang, LAN Tian, et al. TNT: target-driven trajectory prediction[EB/OL]. (2020−08−19) [2023−06−26]. https://arxiv.org/abs/2008.08294. [20] GU Junru, SUN Chen, ZHAO Hang. DenseTNT: end-to-end trajectory prediction from dense goal sets[C]//2021 IEEE/CVF International Conference on Computer Vision. Montreal: IEEE, 2021: 15283−15292. [21] LIN Yong, DONG Hanze, WANG Hao, et al. Bayesian invariant risk minimization[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. New Orleans: IEEE, 2022: 16000−16009. [22] ZHOU Xiao, LIN Yong, ZHANG Weizhong, et al. Sparse invariant risk minimization[C]//Proceedings of the 39th International Conference on Machine Learning. Baltimore: PMLR, 2022: 27222−27244. [23] ZIEGLER J, BENDER P, SCHREIBER M, et al. Making bertha drive—an autonomous journey on a historic route[J]. IEEE intelligent transportation systems magazine, 2014, 6(2): 8−20. doi: 10.1109/MITS.2014.2306552 [24] HONG J, SAPP B, PHILBIN J. Rules of the road: predicting driving behavior with a convolutional model of semantic interactions[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach: IEEE, 2019: 8454−8462. [25] GAO Jiyang, SUN Chen, ZHAO Hang, et al. VectorNet: encoding HD maps and agent dynamics from vectorized representation[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2020: 11522−11530. [26] ZENG Wenyuan, LIANG Ming, LIAO Renjie, et al. LaneRCNN: distributed representations for graph-centric motion forecasting[C]//2021 IEEE/RSJ International Conference on Intelligent Robots and Systems. Prague: IEEE, 2021: 532−539. [27] WANG Jindong, LAN Cuiling, LIU Chang, et al. Generalizing to unseen domains: a survey on domain generalization[J]. IEEE transactions on knowledge and data engineering, 2023, 35(8): 8052−8072. [28] PENG Xi, QIAO Fengchun, ZHAO Long. Out-of-domain generalization from a single source: an uncertainty quantification approach[J]. IEEE transactions on pattern analysis and machine intelligence, 2024, 46(3): 1775−1787. doi: 10.1109/TPAMI.2022.3184598 [29] SOMAVARAPU N , MA C Y , KIRA Z . Frustratingly simple domain generalization via image stylization[EB/OL]. (2020−06−19) [2023−06−26]. https://arxiv.org/abs/2006.11207. [30] SEGU M, TONIONI A, TOMBARI F. Batch normalization embeddings for deep domain generalization[J]. Pattern recognition, 2023, 135: 109115. doi: 10.1016/j.patcog.2022.109115 [31] LI Da, YANG Yongxin, SONG Yizhe, et al. Learning to generalize: meta-learning for domain generalization[J]. Proceedings of the AAAI conference on artificial intelligence, 2018, 32(1): 3490−3497. [32] GAN Chuang, YANG Tianbao, GONG Boqing. Learning attributes equals multi-source domain generalization[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 87−97. [33] LI Haoliang, PAN S J, WANG Shiqi, et al. Domain generalization with adversarial feature learning[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018: 5400−5409. [34] KRUEGER D, CABALLERO E, JACOBSEN J H, et al. Out-of-distribution generalization via risk extrapolation (REx)[EB/OL]. (2020−03−02) [2023−06−26]. https://arxiv.org/abs/2003.00688. [35] 侯廉. 面向自动驾驶应用的周车轨迹群体交互式预测[D]. 北京: 清华大学, 2019. HOU Lian. Distributed and interactive prediction of future trajectories of surrounding vehicles for autonomous driving. Beijing: Tsinghua University, 2019. [36] 王少博. 动态场景下基于交互性预测的自动驾驶汽车轨迹规划方法研究[D]. 合肥: 中国科学技术大学, 2020. WANG Shaobo. Research on interaction-aware predictive trajectory planning for autonomous vehicle in dynamic environments. Hefei: University of Science and Technology of China, 2020. [37] ZHAN Wei, SUN Liting, WANG Di, et al. Interaction dataset: an international, adversarial and cooperative motion dataset in interactive driving scenarios with semantic maps[EB/OL]. (2019−10−30) [2023−06−26]. https://arxiv.org/abs/1910.03088. [38] VAPNIK V N. Statistical learning theory[M]. New York: Wiley, 1998. [39] GANIN Y , USTINOVA E , AJAKAN H, et al. Domain-adversarial training of neural networks[J]. Journal of machine learning research, 2016, 17(1): 2096−2030.














































































































